开关磁阻调速电动机(SRD)介绍
- 格式:pdf
- 大小:832.41 KB
- 文档页数:17

开关磁阻电动机驱动系统(SRD)简介开关磁阻电动机驱动系统(SRD)是较为复杂的机电一体化装置,SRD的运行需要在线实时检测的反馈量一般有转子位置、速度及电流等,然后根据控制目标综合这些信息给出控制指令,实现运行控制及保护等功能。
转子位置检测环节是SRD的重要组成部分,检测到的转子位置信号是各相主开关器件正确进行逻辑切换的根据,也为速度控制环节提供了速度反馈信号。
开关磁阻电机具有再生的能力,系统效率高。
对开关磁阻电机的理论研究和实践证明,该系统具有许多显著的优点:(1)电机结构简单、坚固,制造工艺简单,成本低,可工作于极高转速;定子线圈嵌放容易,端部短而牢固,工作可靠,能适用于各种恶劣、高温甚至强振动环境。
(2)损耗主要产生在定子,电机易于冷却;转子无永磁体,可允许有较高的温升。
(3)转矩方向与电流方向无关,从而可最大限度简化功率变换器,降低系统成本。
(4)功率变换器不会出现直通故障,可靠性高。
(5)起动转矩大,低速性能好,无感应电动机在起动时所出现的冲击电流现象。
(6)调速范围宽,控制灵活,易于实现各种特殊要求的转矩-速度特性。
(7)在宽广的转速和功率范围内都具有高效率(8)能四象限运行,具有较强的再生制动能力。
(9)容错能力强。
开关磁阻电机的容错体现在电机某一相损坏,电机照样可以运行。
与当前广泛应用的变频调速感应电动机相比,开关磁阻电机在成本、效率、调速性能、单位体积功率、可靠性、散热性等都具有明显的优势或竞争力。
如果说第一代开关磁阻电机(1983年研制)在小功率范围的效率比高效变频调速感应电动机低,第二代开关磁阻电机(1988年研制)的效率已全面超过了高效变频调速感应电动机。
更难得的是,开关磁阻电机在宽广的速度和功率范围内都能保持较高的效率,这是变频调速感应电动机难以比拟的。
感应电动机要取得与直流电机相近的调速特性需采用复杂的矢量控制系统,而开关磁阻电机通过调整开通角、关断角、电压和电流,可以得到不同负载要求的机械特性,控制简单、灵活,能容易地实现软启动和四象限运行,而且由于这是一种纯逻辑的控制方式,很容易智能化,通过修改软件调整电机工作特性满足不同应用要求。


半导体器件应用网
/news/192430.html SRD开关磁阻电机驱动系统控制原理【大比特导读】SRD开关磁阻电机调速系统(Switched Reluctance Driver,简称SRD)是磁电机自动化控制技术为基础的机电一体化产品。
它由开关磁阻电动机
与智能电机控制器(驱动器)两部分组成,是继直流电动机、交流异步电动机变频
驱动系统之后发展起来的新一代无极驱动系统。
系统概述
SRD开关磁阻电机调速系统(Switched Reluctance Driver,简称SRD)是磁电机自动化控
制技术为基础的机电一体化产品。
它由开关磁阻电动机与智能电机控制器(驱动器)两部分组成,是继直流电动机、交流异步电动机变频驱动系统之后发展起来的新一代无极驱动系统。
系统原理
半导体器件应用网
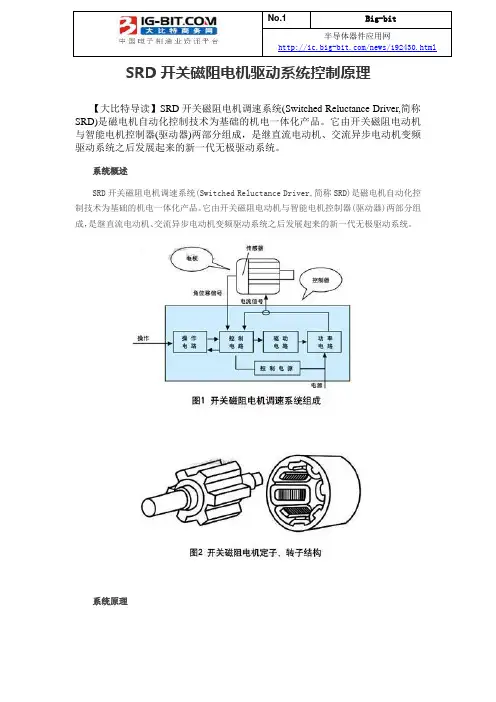
SRD开关磁阻电机驱动系统控制原理(如图1所示)。
电机内安装有位置传感器,控制器由功率电路和控制电路等单元组成。
工作状态下(如图3所示),通过控制相绕组的电子开关S1、S2的工作状态,就可以改变电机的转向、转矩、转速、制动等工作状态。
工作时磁场示意图(如图4所示)
电机结构
SRD电机是定子、转子双凸极可变磁阻电机,定子、转子均由高性能冷轧硅钢片叠压而成,转子上既无绕组也无永磁体,定子极上绕有中绕组,如图2所示。
开关磁阻电动机调速系统(SRD)在空气压缩机上的应用图 1:开关磁阻电动机原理图一、 SRD 工作原理简介开关磁阻电动机(SRM )是定子、转子双凸极可变磁阻电动机。
定子、转子均由硅钢片叠压而成,转子上既无绕组也无永磁体,定子极上绕有集中绕组。
开关磁阻电动机可设计成多种不同相数结构,且定、转子的极数有多种不同的搭配。
图1所示电动机为8/6极。
若以图1中定、转子的相对位置作为起始位置,依次给A →B →C →D 相绕组通电,转子即会逆着励磁顺序以逆时针方向连续旋转;反之,依次给D →C →B →A 相通电,则电动机会顺时针方向转动。
开关磁阻电动机的转向与相绕组的电流方向无关,只取决于相绕组通电的顺序。
该电动机结构比鼠笼式交流异步电动机还要简单,其突出的优点是定子上只有几个集中绕组,转子上无任何形式的绕组,机械强度很高,制造简单、可靠性高。
控制器通过电子电路控制功率开关器件的导通与关断,功率开关器件又控制电动机各相绕组的导通与关断,从而使电动机旋转,旋转方向与电流方向无关。
通过控制绕组导通与关断的顺序,可以控制电动机的旋转方向,通过控制绕组的电流及开通与关断角度可以控制电动机的转速。
控制器原理如图2所示。
模拟量输入RS232模拟量输出开关量输入开关量输出图2:开关磁阻电动机控制器原理图二、SRD系统特性开关磁阻电动机调速系统是由嵌入式微处理器、大规模数字模拟器件、电力电子功率器件及开关磁阻电动机共同组成的新型调速系统,其性能指标比普通交流变频调速系统及直流电机调速系统都要好,它是一种新颖的、高性价比的、具有典型机电一体化结构的无级调速系统。
该系统具有以下优点:1.系统效率高开关磁阻电动机调速系统在其宽广的调速范围内,整体效率比其它调速系统高出至少10%。
在低转速及非额定负载下高效率更加明显。
2.调速范围宽,低速下可长期运转开关磁阻电动机调速系统在整个调速范围内均可带负荷长期运转,电机及控制器的温升均低于工作在额定负载时的温升。

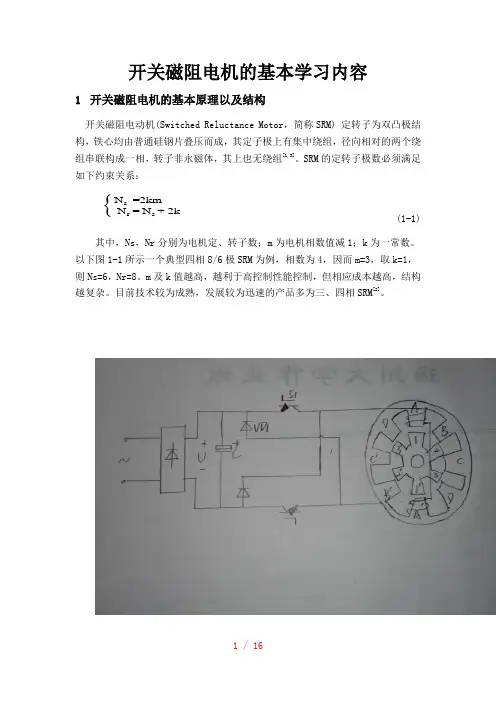
开关磁阻电机的基本学习内容1 开关磁阻电机的基本原理以及结构开关磁阻电动机(Switched Reluctance Motor ,简称SRM) 定转子为双凸极结构,铁心均由普通硅钢片叠压而成,其定子极上有集中绕组,径向相对的两个绕组串联构成一相,转子非永磁体,其上也无绕组[1,3]。
SRM 的定转子极数必须满足如下约束关系:s r s N =2kmN = N + 2k (1-1) 其中,Ns ,Nr 分别为电机定、转子数;m 为电机相数值减1;k 为一常数。
以下图1-1所示一个典型四相8/6极SRM 为例,相数为4,因而m=3,取k=1,则Ns=6,Nr=8。
m 及k 值越高,越利于高控制性能控制,但相应成本越高,结构越复杂。
目前技术较为成熟,发展较为迅速的产品多为三、四相SRM [2]。
图1-1即为一典型四相8/6结构的SRM电机本体及其不对称功率变换器主电路的示意图(图1-1在末尾手画)。
为表述清晰,图中仅画出不对称半桥电路的一相,其他各相均与该相相同,并省略了相应的驱动及检测电路。
完整的开关磁阻电机调速系统(Switched Reluctance Motor Drive,简称SRD)则由SRM、功率变换器、控制器、位置检测器等四大部分组成,如下图1-2示。
SRM可以认为是同步电机的一个分支,它运行时遵循磁阻最小原理,同步进电机较为类似[2,30]。
其具体运行原理如下:首先要保证励磁相的定子凸极和最近的转子凹极中心线不重合,也即初始位移不能位于磁阻最小位置。
通以交流电后,经过一个整流桥变为直流电源,当开关S1和S2开通时,AA’相通电励磁,产生一个磁拉力。
在该电磁力的轴向分量作用下,产生电磁转矩,凸极转子铁心趋向于旋转到定转子极轴线B-B’与A-A’重合的位置;而电磁力的径向力分量则造成定子的“变形”,这也是产生转矩脉动和电机噪声的根本原因之一。
在该过程中电机吸收电能。
关断S1和S2,开通BB’相,此时AA’相经续流二极管VD1、VD2将电能回馈给电源,同时BB’相趋向运行到定转子极轴线C-C’与B-B’重合的位置。
开关磁阻电机调速系统(简称SRD系统)是一种新型的无级交流调速系统,它兼有交直流调速系统的优点,①电机结构简单坚固,免维护,调速方便,性能可靠,可以频繁起制动、正反转,电机不怕热。
②电机起动转矩为额定转矩的150%,而起动电流仅为额定电流的30%。
③电机空载电流仅为额定电流的1%。
④电机特有断电制动功能,避免床面冲出工作台。
诸多的优点使其在多种调速方案中脱颖而出,在诸如龙门刨床频繁正反转起制动的机械上应用,效果尤为突出。
2005年10月,国家发改委、科技部、国家环保总局联合发布节能指导文件,已把开关磁阻电动机调速系统作为节能产品进行推广,在市场上已经得到认可,其节能降噪,提高可靠性等优点已经得到广大改造用户的赞扬和肯定。
开关磁阻调速电动机系统开关磁阻电机系统是一种机电一体化节能型调速电机系统。
开关磁阻电机的原理遵循“磁阻最小的原理”磁通总是沿磁阻最小的路径闭合,因而磁场扭曲而产生磁阻性质的电磁转矩,开关磁阻电机系统是由开关磁阻电动机、功率变换器及控制器组成。
同传统的直流及交流电机调速系统比较,具有以下优点:电机结构简单、坚固、制造成本低;效率高,不仅在额定输出状态下,而且在宽广的调速范围内也能保持高效率运行;一般系统效率达80%以上;启动转矩大、启动电流小;制动性能好,能实现再生制动,节约电能效果显著;系统调控性能好,可实现四象限控制灵活控制;维护方便,具有无刷结构,适合于在高粉尘、高速、易燃易爆等恶劣环境下运行;可以在各行各业应用。
开关磁阻电机调速系统电动机作为一种量大面广的机电产品,是最主要的电能消耗设备,在我国,仅中小型电动机所消耗电能就占全国发电量的60%以上。
在各类电动机中,需要调速运行或可采用调速运行的近三分之一。
这些电动机采用调速节电技术后,平均节电率可达20%,每年能够为国家节约用电数百亿度,具有巨大的经济与社会效益。
开关型磁阻电动机调速系统(Switched Reluctance Driver,简称SRD)是以现代电力电子与微机控制技术为基础的机电一体化产品。
它由开关型磁阻电动机(简称SR电动机)与微机智能控制器两部分组成,其突出特点是效率高、节能效果好,调速范围广,无起动冲击电流,起动转矩大,控制灵活,此外,还具有结构简单、坚固可靠,成本低等优点。
除可以取代已有的电气传动调速系统(如变频调速系统)外,SRD还十分适用于运输车辆驱动、龙门刨床、提升机械等需要重载起动,频繁起动、正反转,长期低速运行等特殊应用场合。
SRD是当代电气传动领域的热门课题。
国外已有正式的产品,我国已从理论研究迈步到工业应用阶段。
目前,SRD技术正处于产业化突破的关键时期,谁开发出了成熟的工业化产品,谁就抢得了市场先机,必将能够获得丰厚的利润回报。
2001年,山东科汇电气股份有限公司与淄博牵引电机(集团)股份有限公司合作,发挥两个单位分别在电力电子技术与电机技术开发方面的优势,加快SRD产品开发进度。
SRD课题组与北京交通大学、山东理工大学合作,攻克了数个技术难关,已推出1.1kW~132kW 具有自主知识产权的系列产品,鉴定为世界先进产品,具备了批量生产条件。
SRD技术特点(1)效率高,节能效果好。
在所有的调速和功率范围内,SRD整体效率比交流异步电动机变频调速系统(简称变频调速)至少高3%以上,在低速工作的状态下其效率能够提高10%以上。
与直流调速、串级调速、电磁调速等系统相比,SRD节电效果更明显。
(2)起动转矩大,特别适合于那些需要重载起动和负载变化明显并且频繁的场合。
SRD开关磁阻电机驱动系统控制原理SRD (Switched Reluctance Drive) 开关磁阻电机驱动系统是一种采用交绕、直流偏置磁通和数字控制技术的新型电机驱动系统。
相比于传统的电机驱动系统,SRD系统具有简单的结构、高效的转换特性和灵活的控制模式。
本文将通过以下几个方面介绍SRD开关磁阻电机驱动系统的控制原理。
1.SRD系统的基本结构2.SRD系统的工作原理SRD系统在运行时,通过控制定子线圈的电流方向和大小来控制电机的转矩和转速。
当定子线圈通电时,在铁心片之间产生磁场,吸引转子中的铁心片。
通过改变定子线圈的电流方向和大小,可以控制吸引和排斥转子铁心片的力,从而控制电机的转矩。
3.SRD系统的控制模式SRD系统采用数字控制技术,可以灵活地选择不同的控制模式。
常见的控制模式包括速度闭环控制、转矩闭环控制和位置闭环控制。
速度闭环控制通过测量电机的转速,并根据设定值调整电流的大小和方向来控制转速。
转矩闭环控制通过测量电机的转矩,并根据设定值调整电流的大小和方向来控制转矩。
位置闭环控制通过测量电机的位置,并根据设定值调整电流的大小和方向来控制位置。
4.SRD系统的控制策略SRD系统采用先进的控制策略,如模糊控制、PID控制和自适应控制。
在速度闭环控制模式下,可采用PID控制策略,根据转速误差和误差的变化率来调整电流的大小和方向。
在转矩闭环控制模式下,可采用自适应控制策略,根据转矩误差和电流的变化率来调整电流的大小和方向。
在位置闭环控制模式下,可采用模糊控制策略,根据位置误差和电流的变化率来调整电流的大小和方向。
5.SRD系统的优势SRD系统相比传统的电机驱动系统具有以下几个优势:首先,SRD系统结构简单,易于制造和维护。
其次,SRD系统具有高效的转换特性,能够实现高转矩密度和高效能的特点。
此外,SRD系统的数字控制技术使其具有灵活的控制模式和优秀的控制性能。
总结:SRD开关磁阻电机驱动系统通过控制定子线圈的电流方向和大小来控制电机的转矩和转速,并采用数字控制技术实现灵活的控制模式。
电力电子Power Electronic电子技术与软件工程Electronic Tech no l ogy & Software Engineering 开关磁阻电机驱动(SRD)系统概述文/尚巍(上海齐腾驱动技术有限公司 上海市201208 )摘 要:本文针对各类型电机的发展历史以及各种电机驱动技术泊情况展开分析,结合其应用的性能提出相关的应用措施和技术方向,明确了高效节能电机特别是SRD 技术的优缺点和未来发展方向,希望能推动驱动高效节能电机产业的发展。
关键词:开关磁阻电机;高效节能电机;磁性材料;磁路设计;驱动技术1高效节能电机发展之路最早发明的有刷直流电机(DCM)和有刷交流电机(ACM),己经有100多年历史了,直到现在还因为价廉可靠、技术成熟等优点,在市场中占据很大份额。
但未来趋势肯定是高效节能电机,并且正逐步的蚕食传统电机的市场,分为如下几个阶段:第1阶段:改进的交流异步感应电动机(ACIM)。
廉价可靠,直至现在世界各国还在改进和应用,能效标准也从IE1提高IE4。
例如特斯拉第一代就是应用了铜转子技术的ACIM ;第2阶段:额外加装变频器,成为“变频电机”.这个也是世界上大量应用的廉价产品,但是其核心技术仍然是基于ACIM ;第3阶段:使用永磁体作为励磁能源的来源,大大提高了效率。
细分为正弦波电流永磁同步电机(PMSM),矩形脉冲波电流的无 刷直流电机(BLDC)。
如果按照永磁体材料分类,又可分为铁氧体和稀土材料电机,广泛的应用在电动汽车、绝大部分高效电机应用等场合;第4阶段:开关磁阻电机(SRM)。
其实也有100多年的历史了,但是受限于驱动器一直没有广泛应用,直到近些年随着电力电子技 术和半导体技术的飞速发展,突破了驱动技术的瓶颈,才真正发挥 出了他的优势,而且随着研究的深入,其优势越来越明显,大有取代ACIM 、PMSM, BLDC 的趋势。
典型应用如美国联邦快递与政府合作大规模推广应用的SRD 物流车,宝马新一代X-Driver 技术 电动汽车,新一代特斯拉电动汽车等。