gps有关专业术语
- 格式:doc
- 大小:154.50 KB
- 文档页数:10
gps测量原理与应用名词解释GPS(全球定位系统)是一种卫星导航系统,其测量原理和应用涉及许多专业术语。
以下是一些与GPS测量原理和应用相关的名词解释:1.卫星定位系统(Satellite Positioning System):通过卫星系统来确定地球上某点的位置的技术。
2.导航卫星(Navigation Satellite):用于提供导航信号的卫星,GPS系统中有一组专用于导航的卫星。
3.接收机(Receiver):接收并处理来自卫星的信号,计算用户的位置和速度的设备。
4.导航解(Navigation Solution):根据接收到的卫星信号计算出的用户的位置和速度。
5.伪距(Pseudorange):GPS接收机测量的卫星信号传播时间与接收机内部时钟时间之间的差值。
6.载波相位(Carrier Phase):GPS信号中携带导航信息的波的相位,用于更精确地计算位置。
7.多路径效应(Multipath Effect):由于信号反射或绕射引起的信号传播路径不唯一性,可能导致定位误差。
8.时钟偏移(Clock Offset):接收机内部时钟与GPS卫星时钟之间的差异。
9.PDOP(Position Dilution of Precision):表征卫星几何分布对定位精度的影响的参数。
10.RTK(Real-Time Kinematic):实时动态定位技术,使用载波相位信息实现更高精度的位置测量。
11.差分GPS(Differential GPS):使用参考站的观测数据来校正GPS测量误差,提高精度的技术。
12.卫星轨道(Satellite Orbit):卫星在地球周围运行的轨迹。
13.高度角(Elevation Angle):观察者所在位置与卫星之间的连线与地平线的夹角。
14.用户位置(User Position):GPS接收机计算出的用户所在的地理坐标。
15.导航精度(Navigation Accuracy):表征GPS系统提供的位置解的精度水平。
全球定位系统(GPS)术语及定义全球定位系统(GPS)术语及定义【中华人民共和国国家标准GB/T 19391-2003 】2004-12-24 5:55:151范围本标准规定了全球定位系统(GPS)常用术语及定义。
本标准适用于GPS专业范围内的各种标准的制定、各类技术文件的编制,也适用于科研、教学等方面。
2通用术语2.1全球定位系统global positioning system(GPS)导航星navigation by satellite timing and ranging(NA VSTAR)一种卫星导航定位系统。
由空间段、地面控制段和用户段三部分组成.为伞球用户提供实时的三维位置、速度和时间信息。
包括主要为军用的精密定位服务(PPS)和民用的标准定位服务(SPS)。
2.2全球导航卫星系统global navigation satellite system(GLONASS)一种全球卫星导航定位系统:为全球用户提供实时的三维位置、速度和时间信息。
包括军用和民用两种服务。
2.3伽利略系统Galileo system一种民用全球卫星导航系统;2.4全球导航卫星系统global navigation satellite system(GNSS)由国际民航组织提出的概念。
GNSS的最终目标是由多种民用卫星导航系统组成,向全球民间提供服务。
并将由多国民间参与运行和控制的卫星导航系统。
GNSS也已经为国际海事组织(IMO)所接受。
欧洲的GNSS计划分为两个阶段,即GNSS-1和GNSS-2。
GNSS-1为EGNOS(欧洲地球静止轨道卫星导航重叠服务)系统,GNSS-2为Galileo(伽利略)系统。
2.5静地星/定位星系统Geostar/Locstar system一种卫星定位系统,利用两颗地球轨道静止卫星双程测距而实现定位功能,兼有简短报文通信能力。
2.6海军导航卫星系统navy navigation satellite system(NNSS)子午仪Transit是1960年由美国研制的卫星导航系统,为固定用户或低动态用户提供不连续定位信息。
20XX 专业合同封面COUNTRACT COVER甲方:XXX乙方:XXX2024版一文读懂GPSNMEA 本合同目录一览1. 定义与术语解释1.1 GPSNMEA的定义1.2 合同双方的身份和信息1.3 相关术语的解释2. 合同的条款和条件2.1 合同的有效期2.2 双方的权利和义务2.3 合同的修改和终止3. GPSNMEA的使用和功能3.1 GPSNMEA的使用范围3.2 GPSNMEA的功能描述3.3 GPSNMEA的技术参数4. 技术支持和维护服务4.1 技术支持的提供4.2 维护服务的实施4.3 服务响应时间和处理流程5. 合同的价格和支付条款5.1 合同价格的确定5.2 支付方式和支付时间5.3 发票的出具和支付6. 违约责任6.1 双方违约的情形6.2 违约责任的计算和赔偿6.3 违约解决的流程7. 争议解决7.1 争议解决的途径7.2 仲裁的地点和规则7.3 法律适用8. 保密条款8.1 保密信息的定义8.2 保密信息的保护措施8.3 保密信息的例外情况9. 法律和监管要求9.1 合同遵守的法律9.2 合同的监管要求9.3 法律变更的影响10. 一般条款10.1 通知和通讯10.2 合同的完整性和可分割性10.3 合同的转让11. 保险11.1 保险的购买和维持11.2 保险事故的通知和处理11.3 保险赔偿的分配12. 知识产权12.1 知识产权的保护12.2 知识产权的使用权限12.3 知识产权侵权的责任13. 附件和附录13.1 合同附件的说明13.2 附录内容的列举13.3 附件和附录的法律效力14. 签署页14.1 双方签署的合同正本14.2 双方签署的合同副本14.3 签署日期和地点的记录第一部分:合同如下:第一条定义与术语解释1.1 GPSNMEA的定义GPSNMEA是全球定位系统(Global Positioning System)的导航信息(Navigation Message)的缩写,是指由GPS卫星发射的一种数据格式,包含了卫星的时间、位置、速度等导航信息。
GPS 常用术语及英文缩写GPS作为野外定位的最佳工具,在户外运动中有广泛的应用,在国内也可以越来越经常地看见有人使用了。
GPS不象电视或收音机,打开就能用,它更象一架相机,你需要有一定的知识。
首先大家要弄清使用GPS时常碰到的一些术语:1.坐标(coordinate)有2维、3维两种坐标表示,当GPS能够收到4颗及以上卫星的信号时,它能计算出本地的3微坐标:经度、纬度、高度,若只能收到3颗卫星的信号,它只能计算出2维坐标:精度和纬度,这时它可能还会显示高度数据,但这数据是无效的。
大部分GPS不仅能以经/纬度(Lat/Long)的方式,显示坐标,而且还可以用UTM(Universal Transverse Mercator)等坐标系统显示坐标但我们一般还是使用LAT/LONG系统,这主要是由你所使用的地图的坐标系统决定的。
坐标的精度在Selective Availability(美国防部为减小GPS精确度而实施的一种措施)打开时,GPS的水平精度在50-100米之间,视接受到卫星信号的多少和强弱而定,若根据GPS的指示,说你已经到达,那么四周看看,应该在大约一个足球场大小的面积内发现你的目标的。
在SA关闭时,精度能达到15米左右。
高度的精确性由于系统结构的原因,更差些。
经纬度的显示方式一般都可以根据自己的爱好选择,一般有\"hddd.ddddd\",\"hddd*mm.mmm\"\",\"hddd*mm\"ss.s\"\"\"(其中的“*”代表“度”,以下同)地球子午线长是39940.67公里,纬度改变一度合110.94公里,一分合1.849公里,一秒合30.8米,赤道圈是40075.36公里,北京地区纬在北纬40度左右,纬度圈长为40075*sin(90-40),此地经度一度合276公里,一分合1.42公里一秒合23.69米,你可以选定某个显示方式,并把各位数字改变一对应地面移动多少米记住,这样能在经纬度和实际里程间建立个大概的对应。
GPS 常用术语及英文缩写GPS作为野外定位的最佳工具,在户外运动中有广泛的应用,在国内也可以越来越经常地看见有人使用了。
GPS不象电视或收音机,打开就能用,它更象一架相机,你需要有一定的知识。
首先大家要弄清使用GPS时常碰到的一些术语:1.坐标(coordinate)有2维、3维两种坐标表示,当GPS能够收到4颗及以上卫星的信号时,它能计算出本地的3微坐标:经度、纬度、高度,若只能收到3颗卫星的信号,它只能计算出2维坐标:精度和纬度,这时它可能还会显示高度数据,但这数据是无效的。
大部分GPS不仅能以经/纬度(Lat/Long)的方式,显示坐标,而且还可以用UTM(Universal Transverse Mercator)等坐标系统显示坐标但我们一般还是使用LAT/LONG系统,这主要是由你所使用的地图的坐标系统决定的。
坐标的精度在Selective Availability(美国防部为减小GPS精确度而实施的一种措施)打开时,GPS的水平精度在50-100米之间,视接受到卫星信号的多少和强弱而定,若根据GPS的指示,说你已经到达,那么四周看看,应该在大约一个足球场大小的面积内发现你的目标的。
在SA关闭时,精度能达到15米左右。
高度的精确性由于系统结构的原因,更差些。
经纬度的显示方式一般都可以根据自己的爱好选择,一般有\"hddd.ddddd\",\"hddd*mm.mmm\"\",\"hddd*mm\"ss.s\"\"\"(其中的“*”代表“度”,以下同)地球子午线长是39940.67公里,纬度改变一度合110.94公里,一分合1.849公里,一秒合30.8米,赤道圈是40075.36公里,北京地区纬在北纬40度左右,纬度圈长为40075*sin(90-40),此地经度一度合276公里,一分合1.42公里一秒合23.69米,你可以选定某个显示方式,并把各位数字改变一对应地面移动多少米记住,这样能在经纬度和实际里程间建立个大概的对应。

专业术语英译汉affine 仿射band 波段cartography 制图学clip 剪切digitizer 数字化仪DLG 数字线划图dpi 每英寸点数edgematching 边缘匹配equator 赤道equiarea 等积geoid 大地水准面geospatial 地理空间GPS 全球定位系统Habitat 栖息地Interface 接口Item 项目Latitude 纬度legend 图例longitude 经度median 中值meridian 子午线metadata 元数据neatline 图廓线Object-Based 基于对象的parcel 宗地photogrammetry 摄影测量precipitation 降水量range 范围raster 栅格resample 重采样resolution 分辨率RMS 均方根scanner 扫描仪siting 选址TIGER 拓扑统一地理编码topology 拓扑tuple 数组UTM 通用横轴墨卡托投影vector 矢量专业术语汉译英保护区protected area比例尺Scale bar标准差Standard deviation标准图幅Standard picture frame 单精度Single precision地理空间数据Geospatial data点缓冲区Point buffer动态分段Dynamic segmentation度量标准Metrics多项式变换Polynomial transformation 高程基准Elevation base跟踪算法Tracking algorithm规则格网Rules grid过渡带Transition zone基于位置服务Based on location service畸形线Malformation line几何变换Geometric transformation 检验图Inspection chart解析几何Analytic geometry空间要素Space element平面坐标系统Planar coordinate system曲流河Meandering river人口普查地段Census Lot上四分位数The upper quartile矢量数据模型Vector data model数据可视化data visualization数据探查Data exploration双精度Double precision水文要素Hydrological elements泰森多边型Tyson Polygons统一建模语言Unified Modeling Language投影坐标系统Projection coordinate system 线缓冲区Line buffer遥感数据Remote sensing data用材林Timber forest晕渲法Halo rendering method 指北针Compass属性表Property sheet最短路径分析Shortest path analysis最小二乘法Least squares method翻译例子如下。
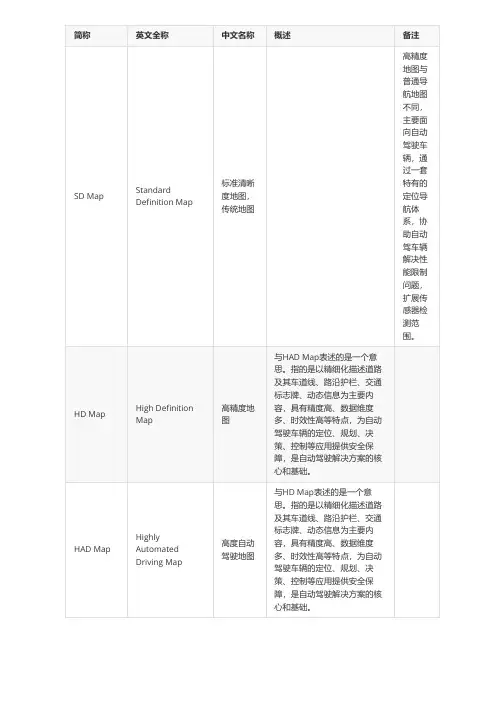
SD Map StandardDefinition Map标准清晰度地图,传统地图高精度地图与普通导航地图不同,主要面向自动驾驶车辆,通过一套特有的定位导航体系,协助自动驾车辆解决性能限制问题,扩展传感器检测范围。
HD Map High DefinitionMap高精度地图与HAD Map表述的是一个意思。
指的是以精细化描述道路及其车道线、路沿护栏、交通标志牌、动态信息为主要内容,具有精度高、数据维度多、时效性高等特点,为自动驾驶车辆的定位、规划、决策、控制等应用提供安全保障,是自动驾驶解决方案的核心和基础。
HAD Map HighlyAutomatedDriving Map高度自动驾驶地图与HD Map表述的是一个意思。
指的是以精细化描述道路及其车道线、路沿护栏、交通标志牌、动态信息为主要内容,具有精度高、数据维度多、时效性高等特点,为自动驾驶车辆的定位、规划、决策、控制等应用提供安全保障,是自动驾驶解决方案的核心和基础。
天地图 天地图是国家测绘地理信息局建设的地理信息综合服务网站。
集成了来自国家、省、市(县)各级测绘地理信息部门,以及相关政府部门、企事业单位、社会团体、公众的地理信息公共服务资源,向各类用户提供权威、标准、统一的在线地理信息综合服务。
国家地理信息公共服务平台包括公众版、政务版、涉密版三个版本,“天地图”就是公众版成果。
瓦片 瓦片地图指将一定范围内的地图按照一定的尺寸和格式,按缩放级别或者比例尺,切成若干行和列的正方形栅格图片,对切片后的正方形栅格图片被形象的称为瓦片(Tile)。
瓦片地图金字塔模型是一种多分辨率层次模型,从瓦片金字塔的底层到顶层,分辨率越来越低,但表示的地理范围不变。
对瓦片的定义:我们在固定的坐标位置划分了长 76米,宽66 米的格网,称之为瓦片。
每个瓦片都有自己的ID,可以快速定位。
外业采集的点云一般数据量比较大,点云基于瓦片进行切割后,以瓦片为单位分割任务和加载点云。
GPS 常用术语及英文缩写GPS作为野外定位的最佳工具,在户外运动中有广泛的应用,在国内也可以越来越经常地看见有人使用了。
GPS不象电视或收音机,打开就能用,它更象一架相机,你需要有一定的知识。
首先大家要弄清使用GPS时常碰到的一些术语:1.坐标(coordinate)有2维、3维两种坐标表示,当GPS能够收到4颗及以上卫星的信号时,它能计算出本地的3微坐标:经度、纬度、高度,若只能收到3颗卫星的信号,它只能计算出2维坐标:精度和纬度,这时它可能还会显示高度数据,但这数据是无效的。
大部分GPS不仅能以经/纬度(Lat/Long)的方式,显示坐标,而且还可以用UTM(Universal Transverse Mercator)等坐标系统显示坐标但我们一般还是使用LAT/LONG系统,这主要是由你所使用的地图的坐标系统决定的。
坐标的精度在Selective Availability(美国防部为减小GPS精确度而实施的一种措施)打开时,GPS的水平精度在50-100米之间,视接受到卫星信号的多少和强弱而定,若根据GPS的指示,说你已经到达,那么四周看看,应该在大约一个足球场大小的面积内发现你的目标的。
在SA关闭时,精度能达到15米左右。
高度的精确性由于系统结构的原因,更差些。
经纬度的显示方式一般都可以根据自己的爱好选择,一般有\"hddd.ddddd\",\"hddd*mm.mmm\"\",\"hddd*mm\"ss.s\"\"\"(其中的“*”代表“度”,以下同)地球子午线长是39940.67公里,纬度改变一度合110.94公里,一分合1.849公里,一秒合30.8米,赤道圈是40075.36公里,北京地区纬在北纬40度左右,纬度圈长为40075*sin(90-40),此地经度一度合276公里,一分合1.42公里一秒合23.69米,你可以选定某个显示方式,并把各位数字改变一对应地面移动多少米记住,这样能在经纬度和实际里程间建立个大概的对应。
导航专业术语GPS常用专业术语2008年03月05日星期三20:392D Mode 2D导航模式由至少3颗可见的卫星订出水平方向的二维坐标系。
3D Mode 3D导航模式由4颗以上之卫星订出所做位置的三维坐标。
Acquisition Time第一次定位时间GPS接收器接收卫星讯号以决定初始位置所花的时间,一般而言4颗卫星可决定3D位置,3个卫星可决定2D位置。
Active Leg目前航段目前的所纪录的路径。
Almanac Data卫星星历由GPS卫星所发出之资料,包含每一卫星轨道位置、群集等信息。
星历可增进GPS接收器搜寻卫星的速度。
Anti-Spoofing反编码由于美国国防部为避免P-电码被接收应用,故将P-电码调制部份错误之讯息广播,而避开接收到此错误讯息的动作,称为反编码。
Atomic Clock原子钟使用铯元素或铷元素制作之精准时钟,估计每一百万年仅有一秒之误差。
Azimuth方位角地表某一点与地球球心之夹角。
也称做相对方位。
Beacon信标台为提升GPS的定位精度,所设立的非指向性广播电台,用以广播站台所在地之GPS虚拟距离校正资料,附近的一般GPS接收机,若能接收及应用此资料,即能提高该接收机的定位精度。
Bearing相对方位从某一位置点到终点的罗盘指示方向,也可称之为方位角。
Coarse Acquisition Code (C/A Code) C/A电码一个开放给民间使用的GPS卫星传送标准定位信号,它包含有GPS接收机用来确定其定位与时间方面的讯息,精确度在100公尺左右。
Cold Start冷开机开机后GPS接收器需执行一连串如下载星历等的初始化动作,也称为初始值。
Control Segment地面控制站部份这是为了追踪及控制卫星运转,所设置的地面管制站,主要工作为负责修正与维护每个卫星能保持正常运转的各项参数资料,以确保每个卫星都能提供正确的讯息给使用者接收机来接收。
Coordinate坐标显示格式一套以数字来描述您在地球上所在位置的显示方法。
GPS常用术语测绘科学2009-10-10 13:52:50 阅读45 评论0 字号:大中小1.全球定位系统(GPS ) Global Position SystemGPS 是由美国研制的导航、授时和定位系统。
它由空中卫星、地面跟踪监控站、和用户站三部分组成,具有在海、陆、空进行全方位实时三维导航和定位能力。
GPS 系统的特点是高精度、全天候、高效率、多功能、操作简便、使用广泛等。
2.实时动态测量(RTK) Real Time KinematicRTK 定位技术是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。
在RTK作业模式下,基准站通过数据链将其观测值和测站坐标信息一起传送给流动站。
流动站不仅通过数据链接收来自基准站的数据,还要采集GPS 观测数据,并在系统内组成差分观测值进行实时处理。
流动站可处于静止状态,也可处于运动状态。
RTK 技术的关键在于数据处理技术和数据传输技术。
3. 观测时段Observation测站上开始接收卫星信号到停接收,连续观测的时间长度。
4. 同步观测Simultaneous Observation两站或两站以上接收机同时对同一组卫星进行观测。
5. 天线高Antenna Height观测时接收机相位中心到测站中心标志面的高度。
6. 参考站Reference Station在一定的观测时间内,一台或几台接收机分别在一个或几个测站上,一直保持跟踪观测卫星,其余接收机在这些测站的一定范围内流动作业,这些固定测站就称为参考站。
7. 流动站Roving Station在参考站的一定范围内流动作业,并实时提供三维坐标的接收机称流动接收机。
8. 世界大地坐标系1984 (WGS1984)World Geodetic System 1984由美国国防部在和WGS72 相关的精密星历NSWC –9Z-2 基础上,采用1980大地参考数和BIH1984.0 系统定向所建立的一种地心坐标系。
GPS常用术语、名词解释Acquisition Time: 初始定位时间Active Leg: 激活航线Adapter: 转接器、拾音器、接合器Airborne: 空运的、空降的、机载的、通过无线电传播的Alkaline: 碱性的、碱性Almanac: 历书、概略星历Anti-Spoofing: 反电子欺骗Artwork: 工艺、工艺图、原图ssAtomic Clock: 原子钟Auto-controlling: 自动控制Avionics: 航空电子工学;电子设备Azimuth: 方位角、方位(从当前位置到目的地的方向)Beacon: 信标Bearing: 方向,方位(从当前位置到目的地的方向)Bug: 故障、缺陷、干扰、雷达位置测定器、窃听器Built-in: 内置的、嵌入的Cellular: 单元的、格网的、蜂窝的、网眼的Cinderella: 水晶鞋、灰姑娘这里特指JA V AD GPS接收机OEM板的选项,能自动在隔周的星期二GPS午夜时刻开始的24小时内让您的Javad接收机和OEM板变为双频双系统。
Coarse Acquisition Code(C/A): 粗捕获码Cold Start: 冷启动Connector: 接头、插头、转接器Constellation: 星座Control Segment: 控制部分Converter: 转换器、交换器、换能器、变频管、变频器、转换反应堆Coordinate: 坐标Co-pilot: 飞机副驾驶Cost-effective: 成本低,收效大的Course: 路线、路程、航线Course Deviation Indicator (CDI): 航线偏航指示Course Made Good (CMG): 从起点到当前位置的方位Course Over Ground (COG): 对地航向Course To Steer(CTS): 到目的地的最佳行驶方向Crosstrack Error (XTE/XTK): 偏航De-emphasis: 去矫、去加重Definition: 清晰度Diagonal: 对角线、斜的、对角线的Distinguishability: 分辨率Dropping resistors: 减压电阻器、将压电阻器Datum: 基准Desired Track (DTK): 期望航线(从起点到终点的路线)Differential GPS (DGPS): 差分GPSDilution of Precision (DOP): 精度衰减因子Elevation: 海拔、标高、高度、仰角、垂直切面、正观图Enroute: 在航线上、航线飞行Ephemeris: 星历Estimated Position Error (EPE): 估计位置误差Estimated Time Enroute (ETE): 估计在途时间(已当前速度计算) Estimated Time of Arrival (ETA): 估计到达时间Front-loading data cartridges: 前载数据卡Geodesy: 大地测量学Global Positioning System(GPS): 全球定位系统GLONASS: 俄国全球定位系统GOTO: 从当前位置到另一航路点的航线Greenwich Mean Time: 格林威治时间Grid: 格网坐标Heading: 航向Headphone: 戴在头上的收话器、双耳式耳机Headset amplifier: 头戴式放大器High-contrast: 高对比度Intercom: 内部通信联络系统、联络用对讲电话装置Intersection: 空域交界Interface Option (I/O): 界面接口选项Initialization: 初始化Invert Route: 航线反转Jack: 插座、插孔Keypad: 键盘、按键Kinematic: 动态的L1 Frequency: GPS信号频率之一(1575.42 MHz)L2 Frequency: GPS信号频率之一(1227.6 MHz)Latitude: 纬度、纬线Leg (route): 航段,航线的一段Liquid Crystal Display (LCD): 液晶显示器Local Area Augmentation System (LAAS): 局域增强系统Localizer: 定位器、定位发射机、定位信标Longitude: 经度、经线Long Range Radio Direction Finding System (LORAN): 罗兰导航系统Magnetic North: 磁北Magnetic V ariation: 磁偏角Map Display: 地图显示Meter: 米Mount: 安装、支架、装配、管脚、固定件Multiplexing Receiver: 多路复用接收机Multipath: 多路径Nautical Mile: 海里(1海里=1.852米).Navigation: 导航Navigation Message: 导航电文NA Vigation Satellite Timing and Ranging(NA VSTAR) Global Positioning System: GPS系统的全称National Marine Electronics Association (NMEA): (美国)国家航海电子协会NMEA 0183: GPS接收机和其他航海电子产品的导航数据输出格式North-Up Display: GPS屏幕显示真北向上Observatory: 观象台、天文台Offset: 偏移量Omnidirectional: 全向的、无定向的Orientation: 方位、方向、定位、倾向性、向东性Panel: 仪表盘、面板Panel-mount: 配电盘装配Parallel Channel Receiver: 并行通道接收机P-Code: P码Photocell: 光电管、光电池、光电元件Pinpoint: 极精确的、准确定位、准确测定、针尖Pixel: 象素Position: 位置Position Fix: 定位Position Format: 位置格式Power-on: 接通电源Pre-amplifier: 前置放大器Prime Meridian: 本初子午线Pseudo-Random Noise Code: 伪随机噪声码Pseudorange: 伪距Rack: 齿条、支架、座、导轨Resolution: 分辨率Route: 航线RS-232: 数据通信串口协议Radio Technical Commission for Maritime Services (RTCM): 航海无线电技术委员会,差分信号格式Selective Availability (SA): 选择可用性Sidetone: 侧音Source: 信号源、辐射体Space Segment: 空间部分Speed Over Ground (SOG): 对地航速Specifcation: 详述、说明书、规格、规范、特性Split Comm: 分瓣通信Squelch:静噪音、静噪电路、静噪抑制电路Statute Mile: 英里(1英里=1,609米)Straight Line Navigation: 直线导航Strobe: 闸门、起滤波作用、选通脉冲、读取脉冲TracBack - 按航迹返航Track-Up Display - 航向向上显示Track (TRK): 航向Transceiver:步话机、收发两用机Transponder: 雷达应答机、(卫星通讯的)转发器、脉冲转发机Transducer: 渔探用探头、传感器Triangulation: 三角测量True North: 真北Turn (TRN): 现时航向和目的地之间的夹角Two-way: 双向的、双路的、双通的Universal Time Coordinated (UTC): 世界协调时间Universal Transverse Mercator (UTM): 通用横轴墨卡托投影U.S.C.G.: 美国海岸警卫队User Interface: 用户自定义界面User Segment: 用户部分V elocity Made Good (VMG): 沿计划航线上的航速Viewing angles: 视角Waypoint: 航路点Wide Area Augmentation System (WAAS): 广域差分系统World Geodetic System - 1984(WGS-84): 1984年世界大地坐标系Windshield: 防风玻璃、防风罩Y-Code: 加密的P码Yoke: 架、座、轭、磁轭、磁头组、偏转线圈。
GPS专业词汇词语缩写介绍A - C D - FG - MN - ST - YA - C1PPM - 1PulsePerMinute-----分脉冲1PPS - 1PulsePerSecond----秒脉冲2D----二维定位3D----三维定位A/D - AnalogtoDigital----模拟/数字信号转换A/J - Anti-Jamming----反人为干扰ADF - AutomaticDirectionFinder----自动定向仪ADOP - AttitudeDilutionofPrecision----姿态精度子AE - AntennaElectronics----天线电子学AFB - AirForceBase----美国空军基地AFI - AutomaticFaultIndication----自动错误显示AFS - AirForceStation----空间站AHRS - AttitudeandHeadingReferenceSystem --姿态方向参考系统AIMS -AirspaceTrafficControlRadarBeaconSystemIFFMarkXIISystem空中交通监控雷达信标系统敌我识别标志XII系统AOC - AuxiliaryOutputChip -- 辅助输出芯片AOPA - AircraftOwner&PilotAssociation --飞机所有者及飞行员协会AS - Anti-Spoofing -- 反电子欺骗ASIC - ApplicationSpecificIntegratedCircuit --特殊应用集成电路ATC - AirTrafficControl -- 空中交通控制ATE - AutomaticTestEquipment -- 自动测试仪器ATIS - AutomaticTerminalInformationService --自动终端信息服务ATRCC - AirRouteTrafficControlCenter --空中航线交通控制中心AMV - AutoMagVar -- 自动磁偏角AVLN - AutomaticVehicleLocationandNavigation --车辆自主定位和导航系统AWG-AmericanWireGague -- 美国线规BCD - BinaryCodeDecimal -- 二进制BIPM - InternationalBureauofWeightsandMeasures-- 国际度量衡局BIT - Built-In-Test -- 内置测试BNC -- 同轴电缆接插件BPSK - BiPhaseShiftKeying -- 双相移键控BRG - Bearing -- 方位角(从当前位置到目的地的方向)C/Acode - Coarse/AcquisitionCode -- 粗捕获码CAD - ComputerAidedDesign -- 计算机辅助设计CADD - ComputerAidedDesignDevice -- 计算机辅助设计设备CDI - CourseDeviationIndicator -- 航线偏航指示CDMA - CodeDivisionMultiplexAccess -- 码分多址CDU - ControlDisplayUnit -- 控制显示单元CEP - CircularErrorProbable -- 循环可能误差CMG - CourseModeGood -- 从起点到当前位置的方位CMOS - ComplementaryMetalOxideSemiconductor --补充金属氧化物半导体COG - CourseOverGround -- 对地运动方向CRPA - ControlledRadiationPatternAntenna --受控辐射天线CTS - CourseT oSteer -- 到目的地的最佳行驶方向CTR - criticaltemperatureresistor -- 临界温度电阻器CVR - 飞行语音记录器CW - ContinuousWave -- 连续波A - C D - FG - MN -ST - YD - FDAC - DigitaltoAnalogConverter -- 模拟/数字信号转换器DB - Decibel(X=10LogXdB) -- 分贝DGPS - DifferentialGPS -- 差分GPSDLM - DataLoaderModule -- 数据装载模块DLR - DataLoaderReceptable -- 数据装载接收器DLS - DataLoaderSystem -- 数据装载系统DMA - DefenseMappingAgency -- 国防制图局DME - DistanceMesurementEquipment -- 测距设备DoD - DepartmentofDefense -- 美国国防部DOP - DilutionofPrecision -- 精度因子DRMS -- 二维均方根DRS - DeadReckoningSystem -- 推测航行系统DSP - DigitalSignalProcessing -- 数字信号处理DT&E - DevelopmentTestandEvaluation -- 测试评估发展DTK - DesiredTrack -- 期望航向(从起点到终点的路线)ECEF - EarthCenteredEarthFixed -- 地固地心直角坐标系ECP - EngineeringChangeProposal -- 工程更改建议EDM - ElectronicDistanceMeasurement -- 电子测距EFIS - ElectronicFlightInstrumentSystem --电子飞行仪器系统EM - ElectroMagnetic -- 电磁EMCON - EmissionControl -- 发射控制EPE - EstimatedPositionError -- 估计位置误差ESGN - ElectricallySuspendedGyroNavigator电子陀螺导航仪ETA - EstimatedTimeofArrival估计到达时间ETE - EstimatedTimeEnroute估计在途时间(已当前速度计算)FAA - FederalAviationAdministration(美国)联邦航空局FCC - FederalCommunicationCommission(美国)联邦通信委员会FDAU - FlightDataAcquisitionUnit飞行数据采集系统FDR - FlightDataRecorder飞行数据记录器FGCS -FederalGeodeticControlSubcommittee美国联邦大地测量管制委员会FPL - FlightPlan飞行计划FRPA - FixedRadiationPatternAntenna固定发射天线FSS - FlyingSpotScanner飞点扫描设备A - C D - FG - MN - ST - YG - MGaAs - GalliumArsenide镓砷化物GDOP - GeometricDilutionofPrecision几何精度衰减因子GLONASS - 俄国全球定位系统GMDSS - GlobalMarineDefenseSafeSystem 全球海上安全救助系统GMT - GreenwichMeanTime格林威治时间GPS - GlobalPositioningSystem全球定位系统HAI - HelicopterAssociationInternational世界直升机协会HAMC - HarbinAircraftManufacturingCompany 哈尔滨飞机制造厂HDOP - HorizontalDilutionofPrecision水平精度因子HQUSAF - HeadquartersUSAirForce美国空军总部HIS - HorizontalSituationIndicator水平位置指示HV - HostVehicle主机ICAO - InternationalCivilAviationOrganization国际民航组织ICD - InterfaceControlDocument界面控制文件ICS - InternalCommunicationSystem 内部通信联络系统IF - IntermediateFrequency中频IFF - IdentificationFriendorFoe敌我识别IFR - Infrared红外的,红外线IFR - InstrumentFlightRules仪表飞行规则I-Level - IntermediateLevel中间层ILS - InstrumentLandingSystem仪表着陆系统INMARSAT - INternationalMARitimeSATalliteOrganization 国际海事卫星组织INS - InertialNavigationSystem惯性导航系统I/O - InterfaceOption:界面接口选项Input/Output:输入/输出ION - InstituteofNavigation导航协会IOT&E - InitialOperationalTestandEvaluation 原始操作测试和评估IP - InstrumentationPort仪器使用端口ITS - IntermediateLevelTestSet中间层测试ITU - InternationalT elcommunicationUnion 国际电信联合会J/S - JammingtoSignalRation信号干扰比JTIDS -JointT acticalInformationDistributionSystem 联合战术信息发布系统KHz - KiloHertz千赫L1 - GPS信号频率之一(1575.42MHz)L2 - GPS信号频率之一(1227.6MHz)LAAS - LocalAreaAugmentationSystem局域增强系统Lb - 磅LCD - LiquidCrystalDisplay液晶显示器LEP - LinearErrorProbable线性误差LO - LocalOscillator本机振荡器LORAN - LongRangeRadioDirectionFindingSystem罗兰导航系统LRIP - LowRateInitialProduction小批量试生产LRU - LineReplaceableUnit线性可替代单元M/S - MetresperSecond米/秒MCS - MasterControlStation主控站MCT:MeanCorrectiveMaintenanceTime平均矫正时间MHz - Megahertz兆赫MaxCT - MaximumCorrectiveMaintenanceTime 最大矫正时间MSA - MinimumSafeAltitude最低安全高度MSL - MainSeaLevel公海平面MeanSeaLevel平均海拔MTBF - MeanTimeBetweenFailure平均无故障时间MTBM - MeanTimeBetweenMaintenance平均保持时间A - C D - FG - MN - ST - YN - SNASA - NationalAeronauticSpaceAdministration美国国家航空航天局NAVSTAR - NAVigationSatelliteTimingandRanging导航卫星测时测距NBAA - NationalBusinessAviationAssociation美国国家公务航空协会NDB - NonDirectionBeason无向信标NMEA - NationalMarineElectronicsAssociation(美国)国家航海电子协会NMEA0183:GPS接收机和其他航海电子产品的数据输出格式NOSC - NavalOceanSystemsCenter海军系统中心NRL - NavalResearchLabratory海军研究实验室NS - Nanosecond(10-9second)纳秒NSA - NationalSecurityAgency国家安全局NTDS - NavyT acticalDataSystem海军战术数据系统NTS - NavigationT echnologySatellite导航技术卫星OCS - OperationalControlSystem操作控制系统PCMCIA -PersonalComputerMemoryCardInternatuioalAssociation个人计算机存储卡国际协会PDOP - PositionDilutionofPrecision位置精度衰减因子PPM - PartsPerMillion(10-6)百万分之一PPS - PrecisePositioningService精密定位服务PRN - PseudoRandomNoise伪随机噪声PVT - PositionVelocityandTime位置速度和时间RAIM - ReceiverAutonomousIntegrityMonitoring 接收机自动完好监视RAM - ReliabilityandMaintainability可靠性和可维护性RCVR - Receiver接收机RF - RadioFrequency射频RMS - RootMeanSquare均方根RTCA - RadioT echnicalCommissionforAeronautics 航空无线电技术委员会RTCM - RadioTechnicalCommissionforMaritimeServices 航海无线电技术委员会,差分信号格式RTD - RealtimeDifferential实时差分RTK - RealtimeKinematic实时动态RX - 接收SA - SelectiveAvailability选择可用性SAMSO - SpaceandMissileSystemsOrganization 空间导弹系统机构SEP - SphericalErrorProbable球概率误差SID - suddenionosphericdisturbance(通常由太阳引起的)电离层突然骚动SIL - SystemIntegrationLabratory系统集成实验室SPI - SpecialPositionIdentification特殊位置标识SPS - StandardPositioningService标准定位服务SPSP - SpreadSpectrum扩频SSB - SingleSideband单边带STDCDU:STanDardCDU标准控制显示单元A - C D - FG - MN - ST - Y T - YTACAN - TacticalAirNavigation空战导航TAI - InternationalAtomicTime国际原子时间TCAS - TrafficCollisionAvoidanceSystem 交通避免碰撞系统TDOP - TimeDilutionofPrecision时间精度衰减因子TRK - Track航向TTFF - TimetoFirstFix首次定位时间TTR - T argetTrackingRadar目标跟踪雷达TX - 发射UE - UserEquipment用户设备UHF - UltraHighFrequency超高频USNO - USNavalObservatory美国海军天文台UTC - UniversalTimeCoordinated世界协调时间VDOP - VerticalDilutionofPrecision高程精度衰减因子VFR - VisualFligftRules目视飞行规则VHF - VeryHighFrequency甚高频VHSIC - VeryHighSpeedIntegratedCircuit 超高速集成电路VLSIC - VeryLargeScaleIntegratedCircuit 超大规模集成电路VMG - VelocityMadeGood沿计划航线上的航速VNAV - VeticalNavigation高程导航VOR - VeryHighFrequency(VHF)OmnidirectionalRange甚高频全向信标VOX - Voice-operatedtransmission音控传输WAAS - WideAreaAugmentationSystem广域差分系统WGS-84 - WorldGeodeticSystem-1984 1984年世界大地坐标系,一种坐标格式WMS - Wide-areaMasterStation广域主控站WRS - Wide-areaRoverStation广域流动站XTE - CrosstrackError偏航距YPG - YumaProvingGround尤马实验场。
全球定位系统(GPS)术语及定义全球定位系统(GPS)术语及定义【中华人民共和国国家标准GB/T 19391-2003 】2004-12-24 5:55:151范围本标准规定了全球定位系统(GPS)常用术语及定义。
本标准适用于GPS专业范围内的各种标准的制定、各类技术文件的编制,也适用于科研、教学等方面。
2通用术语2.1全球定位系统global positioning system(GPS)导航星navigation by satellite timing and ranging(NA VSTAR)一种卫星导航定位系统。
由空间段、地面控制段和用户段三部分组成.为伞球用户提供实时的三维位置、速度和时间信息。
包括主要为军用的精密定位服务(PPS)和民用的标准定位服务(SPS)。
2.2全球导航卫星系统global navigation satellite system(GLONASS)一种全球卫星导航定位系统:为全球用户提供实时的三维位置、速度和时间信息。
包括军用和民用两种服务。
2.3伽利略系统Galileo system一种民用全球卫星导航系统;2.4全球导航卫星系统global navigation satellite system(GNSS)由国际民航组织提出的概念。
GNSS的最终目标是由多种民用卫星导航系统组成,向全球民间提供服务。
并将由多国民间参与运行和控制的卫星导航系统。
GNSS也已经为国际海事组织(IMO)所接受。
欧洲的GNSS计划分为两个阶段,即GNSS-1和GNSS-2。
GNSS-1为EGNOS(欧洲地球静止轨道卫星导航重叠服务)系统,GNSS-2为Galileo(伽利略)系统。
2.5静地星/定位星系统Geostar/Locstar system一种卫星定位系统,利用两颗地球轨道静止卫星双程测距而实现定位功能,兼有简短报文通信能力。
2.6海军导航卫星系统navy navigation satellite system(NNSS)子午仪Transit是1960年由美国研制的卫星导航系统,为固定用户或低动态用户提供不连续定位信息。
A-C:2D Mode 2D导航模式由至少3颗可见的卫星定出水平方向的二维坐标系。
3D Mode 3D导航模式由4颗以上的卫星定出所在位置的三维坐标。
Acquisition Time 第一次定位时间GPS接收机接收卫星信号以定位初始位置所花的时间,一般而言4颗卫星可决定3D位置,3颗卫星可决定2D位置。
Active Leg 当前航段当前航线中正行驶的航段。
Almanac Data 卫星星历由GPS卫星所发出的数据,包含每一卫星轨道位置、群集等信息。
星历可加快GPS接收机搜寻卫星的速度。
Anti-Spoofing 反编码美国国防部为避免P-电码被接收应用,将P-电码调制部分错误的信息发送,而避开接收到此错误信息的动作,称为反编码。
Atomic Clock 原子钟使用铯元素或铷元素制作的精准时钟,估计每一百万年仅有一秒之误差。
Beacon 信标台为提升GPS的定位精度所设立的非定向发射电台。
用来校正发射台所在地的GPS伪距。
附近的一般GPS 接收机若能接收及应用此数据,能提高该接收机的定位精度。
Coarse Acquisition Code (C/A Code) C/A 电码GPS卫星发射的一种供大众使用的标准定位信号,它包含GPS接收机定位与时间方面的信息,精确度在100米左右。
Cold Start 冷启动开机后GPS接收机需执行一连串如下载星历等的初始化动作,也称为初始化。
Control Segment 地面控制站这是为了追踪及控制卫星运转所设置的地面管制站,主要工作是负责修正与维护每个卫星保持正常运转的各项参数数据,以确保每个卫星都能发射正确的信息给使用者接收机。
Coordinate 坐标一套以数字来描述您在地球上的位置的显示方法。
Coordinated Universal Time (UTC) 格林威治时间1986年将格林威治时间设为世界标准时间。
它是以原子测量法为基础,而非地球自转。
格林威治时间仍然是最基本的子午线标准时区﹝零个经度﹞,其时间是由GPS卫星来保存的。
模糊度(Ambiguity):未知量,是从卫星到接收机间测量的载波相位的整周期数。
基线(Baseline):两测量点的联线,在此两点上同时接收GPS 信号并收集其观测数据。
广播星历(Broadcast ephemeris ):由卫星发布的电文中解调获得的卫星轨道参数。
信噪比SNR(Signal-to-noise ratio):某一端点上信号功率与噪声功率之比。
跳周(Cycle skipping):在干扰作用下,环路从一个平衡点,跳过数周,在新的平衡点上稳定下来,使相位整数周期产生错误的现象。
载波(Carrier):作为载体的电波,其上由已知参考值的调制波进行频率、幅度或相位调制。
C/A码(C/A Code):GPS粗测/捕获码,为1023 bit 的双相调制伪随机二进制码,码率为1.023MHz,码重复周期为1ms。
差分测量(Difference measurement):利用交叉卫星、交叉接收机和交叉历元进行GPS测量。
单差(SD)测量:(交叉接收机)由两个接收机同时观测一颗卫星所接收的信号相位的瞬时差。
双差(DD)测量:(交叉接收机,交叉卫星)观测一颗卫星的单差相对于观测参考卫星的单差之差。
三差(TD)测量:(交叉接收机,交叉卫星,交叉历元)在一历元获得的双差与上一历元的双差之差。
差分定位(Difference positioning):同时跟踪相同的GPS信号,确定两个以上接收机之间的相对坐标的方法。
几何精度因子(Geometric dilution of precision):在动态定位中,描述卫星几何位置对误差的贡献的因子,表示式:。
式中,Q 为瞬时动态位置解的矩阵因子(取决于接收机和卫星的位置)。
在GPS中有如下几种标准术语:GDOP (三维坐标加钟差)四维几何因子PDOP(三维坐标)三维坐标几何因子HDOP(平面坐标)二维坐标几何因子VDOP(高程)高程几何因子TDOP(钟差)钟差因子HTDOP(高程和钟差)高程与钟差几何因子动态定位(Dynamic positioning ):确定运动着的接收机随时间变化的测点坐标的方法。
每次测量结果由单次数据采样获得并实时计算。
偏心率(Eccentricity):,式中a,b为长半轴和短半轴。
椭球体(Ellipsoid):大地测量中,随圆绕短半轴旋转形成的数学图形。
一般采用两个参数加以描述,即长半轴长度a和扁率f,,b为短半轴。
星历(Ephemeris):天体的位置随时间的能参数。
扁率(Flattening):a为长半轴,b为短半轴,e为偏心率。
大地水准面(Geoid):与平均海平面并延伸到大陆的特殊等位面。
此面处处垂直于重力方向。
电离层延迟(Ionosphere delay ):电波通过电离层(非均匀和色散介质)产生的延迟。
相延迟取决于电子含量并影响载波信号,群延迟取决于电离层色散并影响信号调制码。
相延迟和群延迟的辐度相同,符号相反。
L波段(L-band):频率为390-1550MHz的无线电频率范围。
多径误差(Multipath error):由两条以上传播路径的无线电信号间干扰而引起的定位误差。
观测时段(Observing session):利用两个以上的接收机同时收集GPS数据的时间段。
伪距(Pseudo range):将接收机中GPS复制码对准所接收的GPS码所需要的时间偏移并乘以光速化算的距离。
此时间偏移是信号接收时刻(接收机时间系列)和信号发射时刻(卫星时间系列)之间的差值。
接收通道(Receiver channel ):GPS接收机中射频、混频和中频通道,能接收和跟踪卫星的两种载频信号。
卫星图形(Satellite configuration):卫星在特定时间内相对于特定用户或一组用户的配置状态。
静态定位(Static position):不考虑接收机运动的点位的测量。
世界时(Universal time):格林尼治的平太阳时。
UT世界时的缩写。
UT0由观测恒星直接求得的世界时。
世界时与恒星时的关系为:太阳日-恒星日=UT1极移改正后的UT0。
UT2地球自转季节变化改正后的UT1。
UTC协调世界时,平滑原子时系统。
它与UT2非常接近。
采样(Sampling):以周期性的时间间隔取某一连续变量值的过程。
Wide Area Augmentation System (WAAS): A U.S. Federal Aviation Authority (FAA) system of equipment and software that supplementsGPS accuracy, availability and integrity. The WAAS provides asatellite signal for WAAS users to support enroute and precisionapproach aircraft navigation.美国联邦航空系统的软硬件设备,可增加 GPS 的精准度。
WAAS 为WAAS 用户提供卫星号以取得精准的航空导航需求。
WGS-84:World Geodetic System - 1984. The mathematical reference ellipsoid used by GPS.世界地理系统于1984年制定,GPS 使用的数字椭球投影系统之一。
7比特位宽的串行码,用来描述数字、大小写字符、特殊字符和非打印字符,一般用于文档数据美国信息交换标准码捕获锁定卫星C/A码和P码的过程。
接收机第一次加电后会捕获所有可用的卫星;而出现新的可用卫星后,再捕获这些新增卫星,并持续跟踪直到它们不可用为止。
地址字段对于NMEA标准格式的行,该固定长度字段跟在起始的语句分隔符”$”(十六进制数:24)之后。
对于符合NMEA的行,其由两个字符的发送者识别符和三个字符的语句格式符组成。
对于特有的行,它包括字符“P(十六进制数:50)”和随后的3字符制造商标识码。
历书一组轨道参数集,可以计算概略的GPS卫星位置和速度。
历书被接收机用来确定卫星的可见性,并在GPS 信号捕获过程中起协助作用。
.历书数据从每颗卫星上耗时12.5分钟下载的一组数据。
它包括所有卫星轨道参数的近似值、GPS相对于UTC时间的转换参数、单频电离层模型参数。
反欺骗控制段阻止对P码的使用的技术称为反欺骗。
通常被加密的Y码取代。
请查阅P码和Y码。
衰减信号强度减少方位角空间某点相对于地面某点的水平方向,用从000°到360°的顺时针角度值来描述。
参考点通常为真北,但也有可能是磁北或者相对方向(如船的朝向)。
指向陆地上某点相对于另外一个点的水平方向,表示为到参考方向的角度,通常以参考方向为000°,顺时针测量到360°。
参考点可能是真北,也可能是磁北或者是与某个相关的值(如船的朝向)载波稳定传输的射频信号,其幅度、频率或相位可被调制以传输信息。
载波相位模糊度用户和卫星之间在开始跟踪时的载波相位整周数。
(有时简称模糊度)载波相位测量即“累加的多普勒平移”(ADR)测量量。
包括瞬时的信号(以1周为模)相位测量量加上某个任意整周数。
一旦接收机跟踪到卫星,接收机所见距离的变化将正确地累加到整周数上。
如果发生“断锁”,累计值将跳到一个任意地整周数上(这称作周跳)。
校验和根据NMEA标准,校验和是对消息中数据执行一个有效地检查,由发送者进行计算,附在消息后,再由接收者重新计算,用于进行相比以确定消息接收是否正确,对有些语句是必须的,其它为可选。
CEP 圆概率误差圆概率误差:圆的半径范围包含了50%的事件集。
粗捕获码一个伪随机比特串,主要用于商业GPS接收机中确定接收机到发送卫星之间的距离。
1023个C/A码片每1ms重复一次,提供一个300m的码片长,以易于锁定。
通信协议信号源和接收器之间建立起来的一种消息传送方法,包括消息格式,消息传送的序列,还包括信号传输的必备条件,如比特率、停止位、奇偶校验和每个字符的比特数。
控制部分包括主控制站和分布全球的参考站,用来管理GPS卫星,确定其精密轨道参数和同步其时钟。
UTC 世界协调时该时间系统使用二次定义的地球真实角度旋转,测量时假设地球绕着协议地极(CTP)旋转。
然而,UTC 调整仅以1秒增加,UTC的时区是格林尼治平均时间。
航向将要或正在操纵航行器到的水平方向值,是一个相对于天空和海的方向值,以角度值来描述,从参考北极(可以是真方向、磁方向、指南针指向或格网),通常定义为000°(北),顺时针到360°。
严格意义上说,该术语适合于描述相对天空和海水的方向,而不适合相对地面的方向。
它与航向角不同。
CMG 规定航线一个简单的合成方向值,从一个给定的出发点到下一个目的点,即从一个点到另一个点的移动方向。
由于操纵错误、水流或者是侧风的影响,该值不同于航迹。
CMG经常作为TMG的同义词,但TMG其实是一个更准确的词。
COG对地航向航行器相对于地面的真实路线,如果用词不当,则被认为是相对于参考子午圈海面的航向值;如果航行器向前或向后偏离航向,则不是一条直线。
纵向航迹误差航行器的当前位置与链接当前航路点坐标系上的某个大圆周线的最近点之间的距离。
如果GPSCard SETNAV名利指定了航迹偏差,则交叉航迹误差将与大圆周线上的航迹偏差有关。
周跳当载波相位观测量跳到一个任意的整周数上时,就出现了周跳。
通常是由于信号跟踪过程中出现遮挡或相似的原因而导致跟踪中断造成。
推航确定航行器概略坐标的过程,通过利用它最近的已知位置,和代表它已经运行了的某个向量或一系列的连续向量值,以及通过记录得知的距离值、引擎转速和速度测量量来计算当前位置。
目的航行器将要到达的直接地理兴趣点。
它也许是某个航行线路中的下一个航路点,也许是某段航程的终点。
DGPS 差分GPS 一种提高GPS精度的技术,利用已知位置上的伪距误差提高处于相同地理区域内的其他GPS接收机的测量值。
DOP 精度因子一个数字值,描述基于当前卫星几何形状的位置解算的置信因子。
值越小,解算的置信度越高。
它有如下几种形式GDOP 所有参数的不确定度(纬度、经度、高度、钟偏)PDOP 3D参数的不确定度(纬度、经度、高度)HTDOP 2D和时间参数的不确定度(纬度、经度、时间)HDOP 2D参数的不确定度(纬度、经度)VDOP 高度参数的不确定度TDOP 钟偏参数的不确定度多普勒信号源相对于观测者运动时,声音、光或其他波将发生频率改变。
多普勒辅助一种信号处理的策略,利用已量测的多普勒频移,帮助接收机平滑跟踪GPS信号,以提供更精确的速度和位置测量量。
双差一种数学技术,通过差分比较接收机间的通道,然后比较参考站和移动站接收机之间的通道。