推荐-MATLAB直流电机起动设计与仿真课程设计报告书 精品
- 格式:doc
- 大小:1.05 MB
- 文档页数:19
《电力电子技术》课程设计说明书直流调速系统设计院、部:电气与信息工程学院学生姓名:***指导老师:陆秀令职称:教授专业:电气工程及其自动化班级:电气本1101班学号: ***********摘要直流调速系统有调速范围广、精度高、动态性能好和易于控制等优点,所以获得了广泛应用。
本文从直流电动机的工作原理入手,建立双闭环直流调速系统的数学模型。
然后按照自动控制原理,利用SIMULINK对系统进行了各种参数给定下的仿真,通过仿真获得了参数整定的依据。
整流电路就是把交流电能转换为直流电能的电路。
大多数整流电路由变压器、整流主电路和滤波器等组成。
它在直流电动机的调速、发电机的励磁调节、电解、电镀等领域得到广泛应用。
整流电路通常由主电路、滤波器和变压器组成。
整流电路的种类有很多,有半波整流电路、单相桥式半控整流电路、单相桥式全控整流电路、三相桥式半控整流电路、三相桥式全控整流电路等。
在理论分析和仿真研究的基础上,本文设计了一套实验用双闭环直流调速系统。
对系统的性能指标进行了实验测试,表明所设计的双闭环调速系统运行稳定可靠,具有较好的静态和动态性能,达到了设计要求。
采用MATLAB软件中的控制工具箱对直流电动机双闭环调速系统进行计算机辅助设计,并用SIMULINK进行动态数字仿真,同时查看仿真波形,以此验证设计的调速系统是否可行。
关键词:直流调速系统;调节器;双闭环系统;仿真;整流目录摘要1 整流电路与双闭环直流调速系统的工作原理 (1)1.1双闭环直流调速系统的介绍 (1)1.2三相桥式全控整流电路的原理 (2)2 系统设计方法及步骤 (6)2.1三相桥式整流电路仿真模型建立和参数设置 (6)(1)三相桥式全控整流电路的分析 (6)(2)三相桥式整流电路的仿真 (6)2.2系统设计参数 (7)(1)直流电机控制系统设计参数 (7)(2) 环境条件 (7)2.3电流环设计 (7)(1)确定时间常数 (7)(2) 选择电流调节器结构 (7)2.4转速环设计 (7)(1) 确定时间常数 (7)(2) 选择转速调节器结构 (7)3 Matlab和Simulink简介 (8)3.1 Matlab简介 (8)3.2 Simulink简介 (8)4 Simulink环境中的系统模型、仿真结果及分析 (10)4.1带阻感性负载三相桥式全控整流电路的仿真分析 (10)4.2直流调速系统的仿真 (11)(1) 开环直流调速系统的仿真 (11)(2) 单闭环有静差转速负反馈调速系统的建模与仿真 (12)(3) 双闭环直流调速系统定量仿真 (14)5 三相桥式全控整流直流不可逆调速系统的电气原理总图 (16)总结 (17)参考文献1 整流电路与直流调速系统的工作原理1.1 双闭环直流调速系统的介绍双闭环调速系统的工作过程和原理:启动阶段,电动机的实际转速低于给定值,速度调节器的输入端存在一个偏差信号,经放大后输出的电压保持为限幅值,速度调节器工作在开环状态,速度调节器的输出电压作为电流给定值送入电流调节器, 此时则以最大电流给定值使电流调节器输出移相信号,直流电压迅速上升,电流也随即增大直到等于最大给定值, 电动机以最大电流恒流加速启动。
直流电机调速matlab仿真报告以直流电机调速Matlab仿真报告为标题引言:直流电机是一种常见的电动机,广泛应用于工业、交通、家电等领域。
在实际应用中,电机的调速控制是一项关键技术,可以使电机在不同工况下实现恒定转速或变速运行。
本文将利用Matlab软件进行直流电机调速的仿真实验,旨在通过仿真结果分析不同调速控制策略的优劣,并提供一种基于Matlab的直流电机调速方法。
一、直流电机调速原理直流电机的调速原理基于电压与转速之间的关系。
电机的转速与输入电压成正比,即在给定电压下,电机转速可以通过调整电压大小来实现调速。
常用的直流电机调速方法有电压调速、电流调速和PWM调速等。
二、Matlab仿真实验设置本次仿真实验将以直流电机调速为目标,基于Matlab软件进行实验设置。
首先,需要建立电机的数学模型,包括电机的转速、电流和电压等参数。
其次,选择合适的调速控制策略,如PID控制、模糊控制或神经网络控制等。
最后,通过调节电压输入,观察电机的转速响应和稳定性。
三、PID控制调速实验1. 实验目的本实验旨在通过PID控制器对直流电机进行调速控制,并分析不同PID参数对控制效果的影响。
2. 实验步骤(1) 建立直流电机的数学模型;(2) 设计PID控制器,包括比例系数Kp、积分系数Ki和微分系数Kd;(3) 利用Matlab软件进行仿真,设定电机的目标转速和初始转速;(4) 通过调节PID参数,观察电机的转速响应和稳定性。
3. 实验结果与分析根据实验设置,我们分别对比了不同PID参数值下的电机转速响应曲线。
结果显示,在合适的PID参数设置下,电机能够实现快速响应和稳定控制。
但是,过大或过小的PID参数值都会导致转速超调或调速不稳定的问题。
四、模糊控制调速实验1. 实验目的本实验旨在通过模糊控制器对直流电机进行调速控制,并分析不同模糊规则和输入输出的影响。
2. 实验步骤(1) 建立直流电机的数学模型;(2) 设计模糊控制器,包括模糊规则、输入变量和输出变量;(3) 利用Matlab软件进行仿真,设定电机的目标转速和初始转速;(4) 通过调节模糊规则和输入输出变量,观察电机的转速响应和稳定性。
基于Matlab的双闭环调速系统设计报告目录一、摘要 (2)二、总体方案设计 (3)1、控制原理2、控制结构图三、参数计算 (5)1、静态参数设计计算2、动态参数设计计算四、稳定性分析 (8)1、基于经典自控理论得分析2、利用MATLAB辅助分析A、利用根轨迹分析B、在频域内分析奈氏曲线:bode图利用单输入单输出仿真工具箱分析用Simulink仿真五、系统校正 (14)1、系统校正的工具2、调节器的选择3、校正环节的设计4、限流装置的选择六、系统验证 (15)1、分析系统的各项指标2、单位阶跃响应3、Simulink仿真系统验证系统运行情况七、心得体会 (20)八、参考文献 (20)一、摘要运动控制课是后续于自动控制原理课的课程,是更加接近本专业实现应用的一门课程。
直流电动机具有良好的起、制动性能,宜于在大范围内平滑调速,在许多需要调速和快速正反向的电力拖动领域中得到了广泛的应用。
由于直流拖动控制系统在理论上和实践上都比较成熟,而且从控制的角度来看,它又是交流拖动控制系统的基础。
所以加深直流电机控制原理理解有很重要的意义。
本设计首先进行总体系统设计,然后确定各个参数,当明确了系统传函之后,再进行稳定性分析,在稳定的基础上,进行整定以达到设计要求。
另外,设计过程中还要以matlab为工具,以求简明直观而方便快捷的设计过程。
二、总体方案设计1、控制原理根据设计要求,所设计的系统应为单闭环直流调速系统,选定转速为反馈量,采用变电压调节方式,实现对直流电机的无极平滑调速。
所以,设计如下的原理图:图1、单闭环直流调速系统原理图转速用与电动机同轴相连的测速电机产生的正比于转速的电压信号反馈到输入端,再与给定值比较,经放大环节产生控制电压,再通过电力电子变换器来调节电机回路电流,达到控制电机转速的目的。
这里,电压放大环节采用集成电路运算放大器实现,主电路用晶闸管可控整流器调节对电机的电源供给。
所以,更具体的原理图如下:图2、单闭环直流调速系统具体原理图2、控制结构图有了原理图之后,把各环节的静态参数用自控原理中的结构图表示,就得到了系统的稳态结构框图。
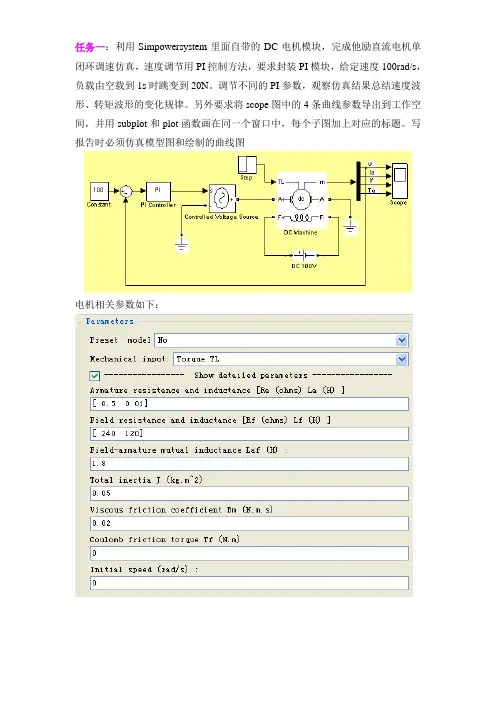
任务一:利用Simpowersystem里面自带的DC电机模块,完成他励直流电机单闭环调速仿真,速度调节用PI控制方法,要求封装PI模块,给定速度100rad/s,负载由空载到1s时跳变到20N。
调节不同的PI参数,观察仿真结果总结速度波形、转矩波形的变化规律。
另外要求将scope图中的4条曲线参数导出到工作空间,并用subplot和plot函数画在同一个窗口中,每个子图加上对应的标题。
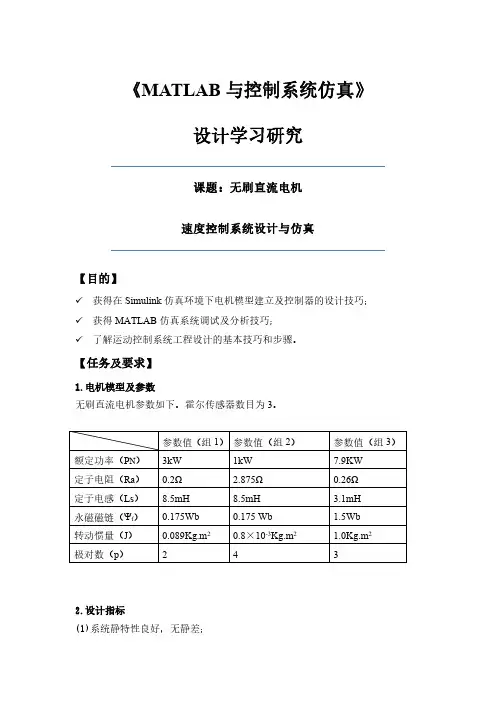
写报告时必须仿真模型图和绘制的曲线图电机相关参数如下:任务二:利用Simulink 基本模块搭建他励直流电机闭环调速系统直流电机子模块,根据以下电机数学模型搭建e M a T C I =Φe L m d T T B J dtωω--= 电机模块要求封装,参数20.05kg m J =⋅,0.02N m s m B =⋅⋅,165m C =,0.01Wb f Φ=点击封装模块时输入。
PI 控制模块要求封装,调节不同的PI 参数,得到不同的速度波形。
写报告时,要给出仿真模型和不同PI 参数的速度波形。
任务三:修改任务二的模型,使其PI 控制参数来自外部变量设定,将速度偏差的仿真结果导出到工作空间(workspace ),用m 文件编写一段循环程序调用任务二的仿真模型(调用函数为sim ),在m 文件中实现对PI 参数的调整,处理数据,得到满意的控制参数,绘制仿真结果曲线图。
M 文件中包含:设定PI 参数――调用仿真模型――速度偏差的最后100个数据点平均值是否小于某个设定值eps ――不满足,则修改PI 参数(用循环的方式修改)……最后用plot 画出速度和转矩波形,用subplot 将两个图画在一个窗口。
求数组长度函数length(),求平均值函数mean(),Subplot ,plot任务四:异步电机调速方法仿真从Help-Demos-SimPowerSystems-General Demos中调出AC Motor Drive - Vector Control (discrete) (power_acdrive.mdl)和Asynchronous Machine (power_pwm.mdl),运行看看结果,并找到相应的模块在哪,并试着自己建立同样的模型。
《MATLAB与控制系统仿真》
设计学习研究
课题:无刷直流电机
速度控制系统设计与仿真
【目的】
✓获得在Simulink仿真环境下电机模型建立及控制器的设计技巧;✓获得MATLAB仿真系统调试及分析技巧;
✓了解运动控制系统工程设计的基本技巧和步骤。
【任务及要求】
1.电机模型及参数
无刷直流电机参数如下。
霍尔传感器数目为3。
2.设计指标
(1)系统静特性良好,无静差;
(2)动态性能指标:转速超调量σn%≤10%,负载扰动产生的动态偏差:
Δnmax/nmin≤10%;扰动恢复时间:tv≤0.5s.
4.设计任务
※基本要求※
(1)设计系统总体控制方案,画出系统组成结构图;
(2)计算主电路功率器件的电压、电流容限要求;
(3)电流调节器与转速调节器均为PI形式,画出闭环阶跃相应曲线及开环波特图,并给出幅值裕量、相位裕量、上升时间、调节时间、超调量等性能指标;(4)系统的MATLAB仿真模型设计及参数设置;
(5)系统仿真调试要求:转速给定值初值为500r/min,持续到第1秒后突变为0rpm;负载转矩初始值为0,在第0.5秒为10N.m,持续到第1秒后突变为
-8N.m并保持.请在该条件下对系统进行仿真,给出电枢电流、转速、电磁转矩的波形图;
(6)系统调试及仿真结果分析。
※扩展要求※
(1)比较分析不同PI转速控制器参数的控制效果,归纳参数调节的一般规律;(2)将电流调节器改为PI控制器,并与滞环调节器控制性能进行比较;
(3)分析基于霍尔传感器的换向技巧;
(4)试用两种不同的通断方式控制两相电流,比较其性能。
Hefei University电子信息与电气工程系自动化专业控制系统数字仿真与CAD课程报告课题:直流电动机双闭环调速系统仿真班级:08自动化(1)班*名:**0805070073朱彤0805070068李方舟0805070053指导老师:***摘要:双闭环(转速环、电流环)直流调速系统是一种当前应用广泛,经济,适用的电力传动系统。
它具有动态响应快、抗干扰能力强的优点。
我们知道反馈闭环控制系统具有良好的抗扰性能,它对于被反馈环的前向通道上的一切扰动作用都能有效的加以抑制。
采用转速负反馈和PI调节器的单闭环调速系统可以在保证系统稳定的条件下实现转速无静差。
对最常用的转速、电流双闭环调速系统的工程设计方法进行了详细的推导。
然后采用Matlab/Simulink方法对实际系统进行仿真,找出推导过程被忽略的细节部分对调速系统的影响,给出工程设计和实际系统之间产生差距的原因,有助于在实际中设计出较优的系统。
关键词:直流电机调速系统仿真MatlabAbstract: Double closed loop ( speed loop, current loop DC speed control system ) is a kind of current application is wide, economic, applicable power transmission system.The paper presents the derive ationof engineering design methods in the speed regulation system of speed and current double closed loop in details. Then,a demo is designed and simulated by Matlab/Simulink to study the influence resulted from the details of the derivation,which has been ignored in the speed regulation system. The reason of difference between the engineeringdesign and the real conditions is given to help working out theoptimaldesigninpractice. Keywords: DC motor Speed regulation system Simulation Matlab一、双闭环直流调速系统的介绍双闭环(转速环、电流环)直流调速系统是一种当前应用广泛,经济,适用的电力传动系统。
物理与电子工程学院《电力拖动自动控制系统》课程设计报告书设计题目:直流电机起动设计与仿真专业:自动化xxx班级: 2014xxxxx本1班学生姓名: xxxxxxxx学号: 20140343121指导教师: xxxxxxxxxx2015年10月25 日物理与电子工程学院课程设计任务书专业:自动化班级:14xxxx1班摘要直流电动机具有调速范围广、调速平稳、过载能力强以及启动和制动转矩大等优点,在工农业生产中得到了广泛的应用。
文章研究了直流电动机串电阻起动方法,在直流电动机电枢绕组中串入电阻来降低起动电流和起动转矩。
相比于电机直接起动,串入电阻起动起动电流和起动转矩显著减低,而且成本又增加不多,在实际工农业生产中有广泛的应用,在课程设计中总共设了3级电阻,第一级电阻R1=0.518,第二季电阻R2=0.32,第三级电阻R3=0.162。
关键词:直流电动机;直接启动;串电阻启动;仿真;目录1 任务提出与方案论证 (1)1.1提出任务 (1)1.2方案论证 (1)2 总体设计 (1)2.1系统总体原理框图 (1)2.2直流电动机直接起动真模型仿真的建立 (2)2.3直流电动机串电阻起动真模型仿真的建立 (5)2.4直流电动机串电阻起动时电阻值计算以及仿真结果分析 (5)3 心得体会 (13)1 任务提出与方案论证1.1提出任务直流电动机刚与电源接通的瞬间,转子尚未转动起来时,他励和串励电动机的电枢电流以及并励和复励电动机的输入电流称为起动电流,这时的电磁转矩称为起动转矩。
一般情况下,在额定电压下直接起动时,起动电流可达电枢电流额定值的10~20倍,起动转矩也能达到额定转矩的10~20倍,这样的起动电流是换向所不允许的,而且过大的起动转矩会使电动机和它所拖动的生产机械遭受突然的巨大冲击,以致损坏传动机械和生产机械。
由此可见,除了额定功率在数百瓦以下的微型直流电动机,因电枢绕组导线细、电枢电阻大以及转动惯量又比较小,可以直接起动以外,一般的直流电动机是不允许采用直接起动的。
基于matlab的电力电子技术仿真设计第1章绪论1.1 MATLAB 的产生过程和影响在 20 世纪七十年代后期的时候:时任美国新墨西哥大学计算机科学系主任的Cleve Moler 教授出于减轻学生编程负担的动机,为学生设计了一组调用LINPACK和EISPACK库程序的“通俗易用”的接口,此即用FORTRAN编写的萌芽状态的MATLAB。
经几年的校际流传,在Little 的推动下,由Little、Moler、Steve Bangert 合作,于1984 年成立了 MathWorks 公司,并把 MATLAB 正式推向市场。
从这时起,MATLAB 的内核采用C语言编写,而且除原有的数值计算能力外,还新增了数据图视功能。
MATLAB以商品形式出现后,仅短短几年,就以其良好的开放性和运行的可靠性,使原先控制领域里的封闭式软件包(如英国的 UMIST,瑞典的 LUND 和 SIMNON,德国的KEDDC)纷纷淘汰,而改以MATLAB为平台加以重建。
在时间进入20 世纪九十年代的时候,MATLAB已经成为国际控制界公认的标准计算软件。
到九十年代初期,在国际上30 几个数学类科技应用软件中,MATLAB在数值计算方面独占鳌头,而Mathematica 和Maple 则分居符号计算软件的前两名。
Mathcad 因其提供计算、图形、文字处理的统一环境而深受中学生欢迎。
MathWorks 公司于1993 年推出MATLAB4.0 版本,从告别DOS 版。
电力电子技术MATLAB实践:电力电子技术中有关电能的变换与控制过程,有各种电路原理的分析与研究、大量的计算、电能变换的波形测量、绘制与分析等,都离不开MATLAB。
首先,它的运算功能强大,应用于交流电的可控整流、直流电的有源逆变与无源逆变中存在的整流输出的平均值、有效值、与电路功率计算、控制角、导通角计算。
其次,MATLAB 的SimpowerSystems实体图形化仿真模型系统,把代表晶闸管、触发器、电阻、电容、电源、电压表等实物的特有符号连接成一个整流装置电路或是一个系统,更简单方便,节省设计制作时间和成本等。

重庆理工大学毕业设计(论文)开题报告题目直流电机调速系统仿真设计1、本课题国内外的研究现状分析直流调速系统凭借优良的调速特性,调速平滑、范围宽、精度高、过载能力大、动态性能好、易于控制以及良好的起、制动性能等优点,能满足生产过程自动化系统中各种不同的特殊运行要求,所以在电气传动中获得了广泛应用。
为了提高直流调速系统的动静态性能指标,通常采用闭环控制系统(包括单闭环系统和多闭环系统)。
对调速指标要求不高的场合,采用单闭环系统,而对调速指标较高的则采用多闭环系统。
直流调速系统在理论上和实践上都比较成热,从控制技术的角度来看,它又是交流调速系统的基础,因此,直流调速系统的应用研究有实际意义。
自从MATLAB的Simulink推出以后,动态系统的仿真就变得非常容易了。
因其含有极为丰富的专用于控制工程与系统分析的函数,具有强大的数学计算功能,且提供方便的图形绘制功能,只要在Simulink中画出系统的动态结构图模型,编写极简单的程序,即可对该系统进行仿真,效率极高,环境友好,从而给系统的设计和校正带来很大的方便。
MATLAB在学术和许多实际领域都得到广泛应用,已成为国际控制界应用最广的语言和工具。
2、本人对课题任务书提出的任务要求及实现目标的可行性分析(只限工科类)本课题要求完成直流电机双闭环调速系统的工程设计并利用MATLAB实现仿真,通过选择及设计各个模块的系统以及对参数的选择,最终得到预期的仿真结果。
任务要求如下:(1)直流电机调速原理分析(2)双闭环调速系统特性分析(3)系统总体方案设计(4)系统仿真设计可行性分析:本课题是针对直流电动机设计的双闭环调速系统,通过MATLAB软件对所设计的系统进行仿真验证。
通过学习《电机与拖动》、《电力电子技术》、《电力拖动自动控制系统》等相关课程基本掌握了电机调速的一些知识,并对直流电机调速系统有了一定的了解。
同时,通过自学《电机与拖动基础及MATLAB仿真》以及《交直流调速系统与MATLAB仿真》使我对MATLAB软件有了一定的了解,并能通过软件对本课题实现仿真,以上所述便能基本完成本课题的任务要求。
第一章课程设计内容及要求1.直流电动机的机械特征仿真;2.直流电动机的直接起动仿真;3.直流电动机电枢串连电阻启动仿真;4.直流电动机能耗制动仿真;5.直流电动机反接制动仿真;6.直流电动机改变电枢电压调速仿真;7.直流电动机改变励磁电流调速仿真。
要求:编写 M文件,在 Simulink环境画仿真模型原理图,用二维绘图命令画仿真结果图或用示波器察看仿真结果,并加以剖析第二章直流电动机的电力拖动仿真绘制1)直流电动机的机械特征仿真clear;U_N=220;P_N=22;I_N=115;n_N=1500;R_a=0.18;R_f=628;Ia_N=I_N-U_N/R_f;C_EPhi_N=(U_N-R_a*Ia_N)/n_N;C_TPhi_N=9.55*C_EPhi_N;Ia=0;Ia_N;n=U_N/C_EPhi_N-R_a/(C_EPhi_N)*Ia;Te=C_TPhi_N*Ia;P1=U_N*Ia+U_N*U_N/R_f;T2_N=9550*P_N/n_N;figure(1);plot(Te,n,'.-');xlabel(' 电磁转矩Te/N.m');ylabel(' 转矩 n/rpm');ylim([0,1800]);figure(2);plot(Te,n,'rs');xlabel(' 电磁转矩Te/N.m');ylabel(' 转矩 n/rpm');hold on;R_c=0;for coef=1:-0.25;0.25;U=U_N*coef;n=U/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te;plot(Te,n,'k-');str=strcat('U=',num2str(U),'V');s_y=1650*coef;text(50,s_y,str);endfigure(3);n=U_N/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te;plot(Te,n,'rs');xlabel(' 电磁转矩Te/N.m');ylabel(' 转矩 n/rpm');hold on;U=U_N;R_c=0.02;for R_c=0:0.5:1.9;n=U/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te;plot(Te,n,'k-');str=strcat('R=',num2str(R_c+R_a),'\Omega');s_y=400*(4-R_c*1.8);text(120,s_y,str);endylim([0,1700]);figure(4);R_c=0;n=U_N/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te; plot(Te,n,'rs');xlabel(' 电磁转矩Te/N.m');ylabel(' 转矩 n/rpm');hold on;U=U_N;R_c=0.02;for R_c=0.5:0.25:1.3;C_EPhi=C_EPhi_N*coef;C_TPhi=C_TPhi_N*coef;n=U/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te;plot(Te,n,'k-');str=strcat('\phi=',num2str(coef),'*\phi_N');s_y=900*(4-coef*2.2);text(120,s_y,str);enda)固有机械特征b)降低电枢电压人为机械特征c) 增添电枢电阻人为机械特征d) 改变磁通人为机械特征2)直流电动机直接起动仿真直流电动机直接起动时,起动电流很大,能够达到额定电流的 10-20 倍,由此产生很大的冲击转矩。
直流调速系统的MATLAB 仿真一、开环直流速系统的仿真开环直流调速系统的电气原理如图1所示。
直流电动机的电枢由三相晶闸管整流电路经平波电抗器L 供电,通过改变触发器移相控制信号c U 调节晶闸管的控制角α,从而改变整流器的输出电压,实现直流电动机的调速。
该系统的仿真模型如图2所示。
图1 开环直流调速系统电气原理图图2 直流开环调速系统的仿真模型为了减小整流器谐波对同步信号的影响,宜设三相交流电源电感s 0L =,直流电动机励磁由直流电源直接供电。
触发器(6-Pulse )的控制角(alpha_deg )由移相控制信号c U 决定,移相特性的数学表达式为minc cmax9090U U αα︒-=︒-在本模型中取min 30α=︒,cmax 10V U =,所以c 906U α=-。
在直流电动机的负载转矩输入端L T 用Step 模块设定加载时刻和加载转矩。
仿真算例1 已知一台四极直流电动机额定参数为N 220V U =,N 136A I =,N 1460r /min n =,a 0.2R =Ω,2222.5N m GD =⋅。
励磁电压f 220V U =,励磁电流f 1.5A I =。
采用三相桥式整流电路,设整流器内阻rec 0.3R =Ω。
平波电抗器d 20mH L =。
仿真该晶闸管-直流电动机开环调速系统,观察电动机在全压起动和起动后加额定负载时的电机转速n 、电磁转矩e T 、电枢电流d i 及电枢电压d u 的变化情况。
仿真步骤:1)绘制系统的仿真模型(图2)。
2)设置模块参数(表1) ① 供电电源电压N rec N 2min 2200.3136130(V)2.34cos 2.34cos30U R I U α++⨯==≈⨯︒② 电动机参数 励磁电阻:f f f 220146.7()1.5U R I ===Ω 励磁电感在恒定磁场控制时可取“0”。
电枢电阻:a 0.2R =Ω电枢电感由下式估算:N a N N 0.422019.119.10.0021(H)2221460136CU L pn I ⨯==⨯≈⨯⨯⨯电枢绕组和励磁绕组间的互感af L :N a N e N 2200.21360.132(V min/r)1460U R I K n --⨯==≈⋅ T e 60600.132 1.262π2πK K ==⨯≈T af f 1.260.84(H)1.5K L I === 电机转动惯量2222.50.57(kg m )449.81GD J g ==≈⋅⨯③ 额定负载转矩L T N 1.26136171.4(N m)T K I ==⨯≈⋅表1 开环直流调速系统主要模型参数3)设置仿真参数:仿真算法odel5s ,仿真时间5.0s ,直流电动机空载起动,起动2.5s 后加额定负载L 171.4N m T =⋅。
直流电机调速仿真报告1. 背景直流电机是一种常见的电动机类型,广泛应用于工业生产和家庭设备中。
在实际应用中,为了满足不同工况下的需求,需要对直流电机进行调速控制。
调速控制可以实现电机转速的精确控制,提高系统的稳定性和效率。
本报告旨在通过Matlab仿真分析直流电机调速控制系统,在理论与实践结合的基础上,提出相应的建议。
2. 分析2.1 直流电机调速原理直流电机调速原理主要基于改变电源的电压或者改变外加负载来实现对电机转速的控制。
常见的直流电机调速方法有:•电压调制法:通过改变直流电源的输出电压来改变转矩和转速;•变阻器分压法:通过改变外接阻值来改变转矩和转速;•变极数法:通过改变励磁回路中串联或并联的励磁线圈数目来改变转矩和转速;•PWM调制法:通过脉冲宽度调制技术来控制输入给定功率。
2.2 直流电机调速控制系统直流电机调速控制系统由电源、电机、传感器、控制器和负载组成。
其中,传感器用于测量电机的转速和位置,控制器根据测量值计算出合适的控制信号,通过电源提供给电机。
负载则影响电机的转速和转矩。
常见的直流电机调速控制方法有:•比例积分(PI)控制:根据误差信号进行比例和积分运算,生成合适的输出信号;•模糊控制:基于模糊推理原理,根据输入变量和规则库生成输出信号;•自适应控制:根据系统动态特性自动调整参数以实现最优性能。
2.3 仿真建模与参数设置本次仿真采用Matlab/Simulink软件进行建模与仿真。
首先需要确定直流电机的基本参数,如额定功率、额定转速、额定电压等。
然后根据实际情况设置仿真模型中的参数。
本次仿真设置了一个基于PWM调制法的直流电机调速系统模型。
具体参数如下:•额定功率:100W•额定转速:1500rpm•额定电压:220V•PWM调制频率:1kHz•控制器采样周期:0.01s3. 结果与分析3.1 仿真结果展示在进行仿真之后,我们得到了直流电机调速系统的仿真结果。
以下是部分结果的展示:•转速曲线图:•转矩曲线图:3.2 结果分析根据仿真结果,可以对直流电机调速系统进行分析。
基于Matlab无刷直流电机控制系统设计与仿真开题报告. 山东科技大学本科毕业设计(论文)开题报告题目基于MATLAB无刷直流电机控制系统的设计与仿真专题 Matlab仿真学院名称信息与电气工程电学院专业班级电气工程及其自动化08-3班学生姓名滕飞学号 200801100326指导教师宋保业填表时间: 年月日计(论文) 基于Mtalab无刷直流电机控制系统的设计与仿真题目其它工程设计应用研究开发研究基础研究设计(论文)类型(划“?”) ? 一、本课题的研究目的和意义无刷直流电机(Bru shlessDCMotor~以下简称BLDC)是随着电力电子技术及新型永磁材料的发展而迅速成熟起来的一种新型电机。
以其体积小、重量轻、效率高、惯量小和控制精度高等优点~同时还保留了普通直流电动机优良的机械特性~广泛应用于光驱、智能机器人、电动交通工具等领域。
随着无刷直流电机应用领域的不断扩大~要求控制系统设计简易、成本低廉、控制算法合理、开发周期短。
建立无刷直流电机控制系统的仿真模型~可以有效的节省控制系统设计时间~及时验证施加于系统的控制算法~观察系统的控制输出,同时可以充分利用计算机仿真的优越性~人为地改变系统的结构、加入不同的扰动和参数变化~以便考察系统在不同结构和不同工况下的动、静态特性。
永磁直流无刷电动机具有效率高、功率密度大、转动惯量小、调速性能好等一系列优点~己经在工业、交通、航空航天、军工、伺服控制领域以及家用电器领域得到广泛应用~虽然我国和国外在电机制造技术方面的差距不大~但是控制系统的研究和开发却需要加大力度。
从另外一个角度来讲~我国的稀土资源特别丰富~占世界总储量的75%~发展直流无刷电动机产业对发展我国的经济有特殊的意义。
二、本课题的主要研究内容,提纲,1、无刷直流电机数学模型的建立2、无刷直流电机各控制模块数学模型的建立3、选取有效方案详细论述并对选取的方案用Matlab建立仿真模型并进行仿真实验4、由仿真结果分析所选方案的特点~适用条件三、文献综述,国内外研究情况及其发展,永磁无刷直流电机的国内外研究概况20世纪七十年代以来~随着电力半导体工业的飞速发展~许多新型的全控型半导体功率器件如gtr、mosfet、igbt等相继问世~加上新型高磁能积永磁材料陆续出现均为无刷直流电动机的广泛应用奠定了坚实的基础~随着电机本体及其相关技术的迅速发展~新型电机不断涌现。
matlab课程设计--基于Matlab 的直流电机双闭环调速系统的设计与仿真基于MATLAB的直流电机双闭环调速系统的设计与仿真班级:自动化12-1班姓名:学号:指导老师:前言MATLAB是一种对技术计算高性能的语言,它集成了计算、可视化和编程于一个易用的环境中。
在此环境下,问题和解答都表达为我们熟悉的数学符号。
典型的应用有:1.数学和计算;2.算法开发;3.建模、模拟和原形化;4.数据分析、探索和可视化;5.科学与工程制图;6.应用开发,包括图形用户界面的建立。
MATLAB在信号与系统中的应用主要包括符号运算和数值计算仿真分析。
由于信号与系统课程的许多内容都是基于公式演算,而MATLAB借助符号数学工具箱提供的符号运算功能,能基本满足信号与系统课程的需求。
例如解微分方程、傅里叶正反变换、拉普拉斯正反变换和z正反变换等。
MATLAB在信号与系统中的另一主要应用是数值计算与仿真分析,主要包括函数波形绘制、函数运算、冲击响应与阶跃响应仿真分析、信号的时域分析、信号的频谱分析、系统的S域分析和零极点图绘制等内容。
数值计算仿真分析可以帮助学生更深入地理解理论知识,并为将来使用MATLAB进行信号处理领域的各种分析和实际应用打下基础。
此次课程设计主要是为了进一步熟悉对matlab软件的使用,以及学会利用matlab对直流电机双闭环调速系统这种实际问题进行处理,将理论应用于实际,加深对它的理解。
目录前言第一章Matlab软件简介1.1 Matlab的产生和历史背景 (1)1.2 Matlab的语言特点 (2)第二章系统介绍2.1 设计参数要求 (4)2.2 稳态参数计算 (4)2.3 电流环设计 (5)2.4 转速换设计 (8)第三章仿真调试3.1 仿真结果分析 (11)3.2 转速电流双闭环程序流程框图 (11)3.3 Matlab源程序 (12)第四章总结 (14)参考文献第一章 Matlab软件简介1.1 Matlab的产生和历史背景在20世纪70年代中期,Cleve Moler博士和其同事在美国国家科学基金的资助下开发了调用EISPACK和LINPACK的FORTRAN子程序库。
基于matlab的电力电子仿真设计报告通过整理的基于matlab的电力电子仿真设计报告相关文档,渴望对大家有所扶植,感谢观看!课程设计(综合试验)报告( 2021-- 2021 年度第 1 学期) 名称:电力电子技术课程设计院系:电气与电子工程学院班级:电气班学号:学生姓名:指导老师:设计周数:20--21周成绩:日期:2021年1月13日摘要和关键词摘要:随着电力电子技术的不断发展,可控整流电路在直流电动机限制、可变直流电源、高压直流输电等方面得到广泛应用。
本文建立了基于MATLAB软件中simulink中powersystem模块编写的单相半波可控整流电路、单相全控桥式整流电路、三相全控桥式整流电路、升降压斩波、三相桥式SPWM逆变电路的仿真模型,以下给出了仿真实例与仿真结果。
验证了模型的正确性,并呈现了simulink 仿真具有的快捷、机敏、便利、直观等优点。
从而为电力电子电路的教学及设计供应了有效工具。
关键词: 整流电路; 电力电子; MATLAB; simulink;仿真目录课程设计的任务************************************ 2 前言********************************************** 2 报告正文(几个电力电子电路仿真实例)************** 2 课程设计总结或结论******************************** 21 参考文献***************************************** 22 一、课程设计的任务(一)建立单相半波可控整流电路仿真模型:1、对教材P43图2-1、P44图2-2和P46图2-4进行验证(沟通电压有效值为220伏)。
2、变更直流侧负载电阻与电感值,视察各波形的变更。
3、变更晶闸管触发角,视察各波形的变更。
(二)建立单相全控桥式整流电路仿真模型:1、对教材P47图2-5、P48图2-6进行验证(假设三相沟通线电压有效值为380伏)。
双闭环直流电动机调速系统设计及M A T L A B仿真(共21页)-本页仅作为预览文档封面,使用时请删除本页-目录1、引言..................................................错误!未定义书签。
二、初始条件:...........................................错误!未定义书签。
三、设计要求:...........................................错误!未定义书签。
四、设计基本思路.........................................错误!未定义书签。
五、系统原理框图.........................................错误!未定义书签。
六、双闭环调速系统的动态结构图...........................错误!未定义书签。
七、参数计算.............................................错误!未定义书签。
1. 有关参数的计算 ...................................错误!未定义书签。
2. 电流环的设计 .....................................错误!未定义书签。
3. 转速环的设计 .....................................错误!未定义书签。
七、双闭环直流不可逆调速系统线路图.......................错误!未定义书签。
1.系统主电路图 ......................................错误!未定义书签。
2.触发电路 ..........................................错误!未定义书签。
3.控制电路 ..........................................错误!未定义书签。
物理与电子工程学院
《电力拖动自动控制系统》课程设计报告书
设计题目:直流电机起动设计与仿真
专业:自动化xxx
班级: 20XXxxxxx本1班
学生姓名: xxxxxxxx
学号: 20XX0343121
指导教师: xxxxxxxxxx
20XX年10月25 日
物理与电子工程学院课程设计任务书
专业:自动化班级:14xxxx1班
摘要
直流电动机具有调速范围广、调速平稳、过载能力强以及启动和制动转矩大等优点,在工农业生产中得到了广泛的应用。
文章研究了直流电动机串电阻起动方法,在直流电动机电枢绕组中串入电阻来降低起动电流和起动转矩。
相比于电机直接起动,串入电阻起动起动电流和起动转矩显著减低,而且成本又增加不多,在实际工农业生产中有广泛的应用,在课程设计中总共设了3级电阻,第一级电阻R1=0.518,第二季电阻R2=0.32,第三级电阻R3=0.162。
关键词:直流电动机;直接启动;串电阻启动;仿真;
目录
1 任务提出与方案论证 (1)
1.1提出任务 (1)
1.2方案论证 (1)
2 总体设计 (1)
2.1系统总体原理框图 (1)
2.2直流电动机直接起动真模型仿真的建立 (2)
2.3直流电动机串电阻起动真模型仿真的建立 (5)
2.4直流电动机串电阻起动时电阻值计算以及仿真结果分析 (5)
3 心得体会 (13)
1 任务提出与方案论证
1.1提出任务
直流电动机刚与电源接通的瞬间,转子尚未转动起来时,他励和串励电动机的电枢电流以及并励和复励电动机的输入电流称为起动电流,这时的电磁转矩称为起动转矩。
一般情况下,在额定电压下直接起动时,起动电流可达电枢电流额定值的10~20倍,起动转矩也能达到额定转矩的10~20倍,这样的起动电流是换向所不允许的,而且过大的起动转矩会使电动机和它所拖动的生产机械遭受突然的巨大冲击,以致损坏传动机械和生产机械。
由此可见,除了额定功率在数百瓦以下的微型直流电动机,因电枢绕组导线细、电枢电阻大以及转动惯量又比较小,可以直接起动以外,一般的直流电动机是不允许采用直接起动的。
1.2方案论证
方案一:直流电动机直接启动
直流电动机直接启动适用于额定功率在数百瓦以下的微型直流电动机,因电枢绕组导线细、电枢电阻大以及转动惯量又比较小,可以直接起动,但是现在工业中绝大数机械都是大功率。
方案二:直流电动机串电阻启动
直流电动机串电阻起动方法,在直流电动机电枢绕组中串入电阻来降低起动电流和起动转矩。
相比于电机直接起动,串电阻起动起动电流和起动转矩显著减低,而且成本又增加不多,在实际工农业生产中有广泛的应用。
最终选择:
经过比较本设计选择方案二直流电动机串电阻启动能更好的达到设计要求。
2 总体设计
2.1系统总体原理框图
直流电动机启动的设计,我们首先对电路原理进行分析,通过分析,结合具体的性能指标求出相应的参数,然后在Matlab仿真软件中建立仿真模型,仿真模型采用交流输入电源,使用晶闸管和二极管作为整流器件,通过不断仿真、调
试、不断修改参数,知道符合正确的参数要求。
其系统原理框图如下图2.1。
图2.1 系统原理框图
2.2直流电动机直接起动真模型仿真的建立
(1)图中的模块有直流电源(DC Voltage Source )、理想开关、直流电动机、开关、增益、电阻(RLC branch )、示波器(scope )、信号分离模块(Demux )。
仿真模型中通过理想开关模块控制直流电源的接通和断开,使用开关模块控制电机的转矩,使电机在起动过程中的转矩为空载起动,当转速达到设定值后,使电机工作再给定的负载转矩。
图2.2 直流电动机直接起动仿真模型
交 流 输 入
控制电路
直流电动机启动电路
输出符合要求的电流和转速
图2.3 直流电机模块参数
图2.2.4 直流电源模块参数图2.4 电压参数设置
图2.5 仿真图
图2.6 电流-转速图
2.3直流电动机串电阻起动仿真模型的建立
直流电动机串电阻起动仿真模型如图2.7所示,该模型在直接起动模型的基础上,在电枢回路中串联一个由三级电阻组成的启动器。
在每个电阻(R1、R2、R3)上并联一个理想开关,用于切除电阻,开关受Step 模块控制。
(注:在Step 模块对话框中设定单位阶跃信号发生时刻,即可控制开关的闭合,从而短接该电阻)。
模型检测将转速n 、电枢电流I 等送入示波器。
图2.7 直流电动机串电阻起动仿真模型
2.4直流电动机串电阻起动时电阻值计算以及仿真结果分析
为了实现直流电动机串电阻起动,对于电枢绕组串入电阻值的计算非常重要,需要计算精确,本文为了尽可能地降低起动电流和起动转矩,采用三级串电阻计算方法。
具体实现步骤如下。
(1)将step 模块2和3的阶跃信号发生时间设为“0”,step1设为20s ,使1
R 接入电枢回路,并初选R'1的阻值。
a.
1'R =m ax
I n
C U e N
--a R =
Ω≈-10896.0220
220
在模型中设1R =1'R =1,
得到
n(r/min)
i/A
a
i/A
f
e T (N.m)
图2.8 串一级电阻启动时的转速和电流波形
由图2.8可知,串联电阻后最大启动电流为200A ,在3.5s 时电流下降到100A ,对应的转速为1500r/min ,相对于直流电机直接起动,起动电流从2500A 变为200A ,显著地减低了,起到了保护电机的作用。
为了进一步减少起动电流,需要减小启动电阻,计算1R 的阻值和预选2'R 阻值。
b.2'R =m ax
I n
C U
e N
--
a R =Ω≈Ω-Ω⨯482.00896.0200
15000.07808-220
c.1R =1'R -2'R =1-0.482=0.518Ω
(2)重新设定R 1和R 2(R 2=R'2)并设step1的信号发生时间为3.5s ,设step2的信号发生时间为20s 得到仿真图形如图2.9所示。
n(r/min)
i/A
a
i/A
f
e T (N.m)
图2.9 串二级电阻启动时的转速和电流波形
c.从图 2.9中可知,在启动6s 后电流再次下降到100A ,此时的转速为2200r/min 。
为了进一步减少起动电流,需要再次减小启动电阻。
根据式d 和e 可以计算2R 和3R 阻值。
d.
2
R =
m ax
I n
C U e N
--
a R =Ω≈Ω-Ω⨯32.00896.0200
22000.07808-220
e.3R =2'R -2R =0.482-0.32=0.162Ω
(4)重新设定2R 和3R 并设step2的信号发生时间为6s ,设step3的信号发生时间为20s 得到仿真图形如图2.10所示。
n(r/min)
i/A
a
i/A
f
T(N.m)
e
图2.10 串三级电阻启动时的转速和电流波形
从图2.10可知在启动8s后起动电流再次下降到100A,此时的转速为
2800r/min,需要再次切除
R,因此设step3的信号发生时间为8s,再次仿真,
3
得到图形如2.11所示。
n(r/min)
i/A
a
图2.11 切除
R启动时的转速和电流波形
3
由图2.11可知:在切除
R后,转速升到3000r/min,在整个启动过程中电流限制在规
3
定的范围内,满足设计要求。
3 心得体会
通过这次课程设计使我对原来学习的过程有了全新认识,学习一定要理论与实践相结合,这样才能更好地学习知识,我用的软件是MATLAB,它也是实验中最重要的一环,用的最多的是Simulink。
Simulink是MATLAB中的一种可视化仿真工具,是一种基于MATLAB的框图设计环境,是实现建模、仿真和分析的一个软件包,被广泛应用于、非线性系统、及的建模和仿真中。
为了创建动态系统模型,Simulink提供了一个建立模型方块图的图形(GUI) ,这个创建过程只需单击和拖动鼠标操作就能完成,它提供了一种更快捷、直接明了的方式,而且可以立即看到系统的仿真结果。
在这次课程设计中我又进一步学习了电机启动的一些知识,也由感性认识上升到实践,这样我对串电阻启动的参数的计算以及设定有了更深刻的认识,也在仿真过程中对参数改变带来的其他变化一目了然,使知识学的活灵活现,还有对直接启动的危害有了更深的了解。
另外这次课程设计让我不仅对电力电子的理论知识有了很深的认识也对我的实践动手能力有了很大的培养。
当然这次设计还有很多不足之处,例如对基础知识了解不够充分,导致设计过程中出现很多不必要的麻烦,所以在以后的学习构成中我会加倍学习相关知识,以弥补自己的不足。
参考文献
[1]汤蕴璆.电机学(第四版) [M].北京:机械工业出版社,20XX
[2]洪乃刚.电力电子、电机控制系统的建模与仿真 [M].北京:机械工业出版社,20XX [4]韩松.基于MATLAB的直流电动机启动的仿真研究[D].黑龙江:绥化学院,20XX
课程设计成绩评定表。