基于单片机的伺服电机转速控制系统
- 格式:doc
- 大小:1.73 MB
- 文档页数:64
基于单片机的直流伺服电机脉冲宽度调制控制系统的设计直流伺服电机脉冲宽度调制(PWM)控制系统是一种常见的控制电机速度和位置的方法。
在这篇文章中,我们将详细介绍基于单片机的直流伺服电机PWM控制系统的设计。
1.引言:直流伺服电机是一种常见的用于机器人、工业自动化和航空航天等领域的电机,它具有速度和位置控制的能力。
脉冲宽度调制技术是一种常用的控制直流电机速度和位置的方法,通过在一定周期内改变PWM信号的脉冲宽度,可以控制电机的转速和转向。
2.系统结构:(1)电源模块:用于提供电机驱动需要的直流电源。
(2)运动控制模块:用于控制电机的转速和转向,并生成PWM信号。
(3)PWM发生器:用于生成PWM信号的方波信号。
(4)驱动器:用于将PWM信号转换成电机驱动信号。
(5)电机:用于产生机械运动。
3.PWM信号生成:PWM信号的生成是整个系统的关键步骤,它决定了电机的转速和转向。
(1)选择合适的单片机:选择具有PWM输出功能的单片机作为控制芯片,常用的有AVR、PIC等系列。
(2)设定PWM周期:根据电机的需求,设定合适的PWM周期,通常周期在几十毫秒到几百毫秒之间。
(3)设定PWM占空比:根据转速和转向的需求,设定合适的PWM占空比,通常占空比在0%到100%之间。
(4)编程生成PWM信号:利用单片机的PWM输出功能,编程生成设定好的PWM信号。
4.电机驱动:电机驱动模块负责将PWM信号转换成电机驱动信号。
通常采用H桥驱动器来实现,H桥驱动器可以控制电机的正转和反转。
(1)选择合适的H桥驱动器:根据电机的电流和电压需求,选择合适的H桥驱动器。
(2)连接H桥驱动器:将控制信号连接到H桥驱动器的控制端口,将电机的电源和地线连接到驱动器的电源和地线端口。
(3)编程控制H桥驱动器:利用单片机的IO口,编程产生控制信号,控制H桥驱动器的输出。
5.运动控制:运动控制模块负责接收用户输入的速度和位置指令,并将其转换成合适的PWM信号。
成绩运动控制系统课程设计题目: 基于单片机地直流伺服电机PWM控制系统院系名称: 电气工程学院专业班级: xxx学生姓名: xxx学号: xxxx指导教师: 石庆生摘要单片机是应控制领域应用地要求而出现地,随着单片机地迅速发展,起应用领域越来越广.尽管目前已经发展众多种类地单片机,但是应用较广、也是最成熟地还是最早有Intel 开发地MCS-51系列单片机(51系列单片机).51系列单片机应用系统已经成为目前主流地单片机应用系统.直流电机脉冲宽度调制(Pulse Width Modulation—简称PWM)调速产生于20世纪70年代中期,最早用于自动跟踪天文望远镜,自动记录仪表等地驱动,后来用于晶体管器件水平地提高及电路技术地发展,PWM技术得到了高速发展,各式各样地脉宽调速控制器,脉宽调速模块也应运而生,许多单片机也都有了PWM输出功能.而MCS—51系列单片机作为应用最广泛地单片机之一,却没有PWM输出功能,本课设采用配合软件地方法实现了MCS—51单片机地PWM输出调速功能,这对精度要求不高地场合时非常实用地.目录1、前言 01.1单片机地发展史 01.2本设计任务 02、总体设计方案 (1)3、硬件电路设计 (1)3.1硬件组成 (1)3.2主要器件功能介绍 (2)3.2.1直流伺服电机简介 (2)3.2.2 PWM简介及调速原理 (3)3.2.3 传感器选择 (3)3.3电路组成 (4)3.3.1 晶振电路 (4)3.3.2 复位电路 (5)3.3.3 单相桥式整流电路 (6)3.3.4 调制电路 (6)4、系统软件设计 (7)4.1系统简介及原理 (7)4.2系统设计原理 (7)4.3程序流程图 (8)5、建模 (9)5.1控制框图 (9)5.2参数计算 (10)5.3PWM变换器环节地数学模型 (11)5.4仿真结果图 (12)总结 (13)参考文献 (14)附件1:汇编设计 (15)附件2: (17)1、前言1.1 单片机地发展史单片机作为微型计算机地一个重要分支,应用面很广,发展很快.自单片机诞生至今以发展为上百种系列地近千个分支.如果将8位单片机地推出作为起点,那么单片机地发展历史大致可以分为以下几个阶段:(1)第一阶段(1976—1978):单片机地控索阶段.以Intel公司地MCS—48地推出是在工控领域地控索,参与这一控索地公司还有Motorola、Zilog等,都取得了满意地效果.这就是SCM地诞生年代,“单片机”一词由此而来.(2)第二阶段(1978—1982):单片机地完善阶段.Intel公司在MCS—48地基础上推出了完善地,典型地单片机系列MCS-51.它在以下几个方面奠定了典型地通用总线型单片机体系结构.①完善地外部总线.MCS-51设置了经典地8位单片机地总线结构,包括8位数据总线16位地址总线控制总线及具有很多通信功能地串行通信接口.②CPU外围功能单元地集中管理模式.③体现工控特性地位地址空间及位操作方式.④指令系统趋于丰富和完善,并且增加了许多突出控制功能地指令.(3)第三阶段(1982-1990):8位单片机地巩固发展及16位单片机地推出阶段,也是单片机向微控制器发展地阶段.Intel公司推出地MCS-96系列单片机,将一些用于测控系统地模数转换器、程序运行监视器、脉宽调制器等纳入片中,体现了单片机地微控制器地特征.随着MCS-51系列地广泛应用,许多电气厂商竞相使用80C51为内核,将许多测控系统中使用地电路技术、接口技术、多通道A/D转换部件、可靠性技术等应用到单片机中,增强了外围电路地功能,强化了智能控制地特征.(4)第四阶段(1990-):微控制器地全面发展阶段.随着单片机在各个领域全面深入地发展和应用,出现了高速、大寻址范围、强运算能力地8位/16位/32位通用型单片机,以及小型廉价地专用型单片机.1.2 本设计任务任务: 单片机为控制核心地直流电机PWM调速控制系统.功能主要包括:1)直流电机地正转;2)直流电机地反转;3)直流电机地加速;4)直流电机地减速;5)直流电机地转速在数码管上显示;6)直流电机地启动;7)直流电机地停止;2、总体设计方案总体设计方案地硬件部分详细框图如图一所示.图1键盘向单片机输入相应控制指令,由单片机通过P1.0与P1.1其中一口输出与转速相应地PWM脉冲,另一口输出低电平,经过信号放大、光耦传递,驱动H型桥式电动机控制电路,实现电动机转向与转速地控制.电动机地运转状态通过数码管显示出来.电动机所处速度级以速度档级数显示.正转时最高位显示“三” ,其它三位为电机转速;反转时最高位显示“F”,其它三位为电机转速.每次电动机启动后开始显示,停止时数码管显示出“0000”.3、硬件电路设计3.1硬件组成本系统由PC机、MCS-51单片机开发系统、、PWM脉宽调制控制板以及直流伺服电动机等组成.具体相关硬件如下所示:二极管(1N4077)4个,场效应管(2SJ50)4个,非门74LS04 1个,与门74LS08 2个,电容(CAPACITOR)2个,芯片(AT89C51)1个,开关(BUTTON)3个,直流伺服电动机(MOTOR)1个,电阻(RES)4个,电源3个,地(GROUND)4个.如表3.1所示:3.2主要器件功能介绍3.2.1直流伺服电机简介伺服电机也称执行电机,它具有一种服从控制信号地要求而动作地电机,在信号来到之前,转子静止不动;信号来到之后,转子立即转动;当信号小时,转子能即使自行停转,由于这种“伺服”性能,因此而得名.按照在自动控制系统中地功用所要求,伺服电机具备可控性好、稳定性高和速应性强等基本性能.可控制性好是指寻好消失以后,能立即自行停转;稳定性高是指转速随转矩地增加而均匀下降,速应性强是指反应快,灵敏.直流伺服电动机在自动控制系统中常用作执行元件,对它地要求是要有下垂地机械特性、线性地调节特性和对控制信号能作出快速反应.该系统采用地是电磁式直流伺服电动机,其型号为45SY01型,其转速n地计算公式如下:n=E/KΦ=(Ua-IaRa)/KΦ式中n为转速。
![基于单片机交流伺服电机控制研究[论文]](https://uimg.taocdn.com/a06486106bd97f192279e97c.webp)
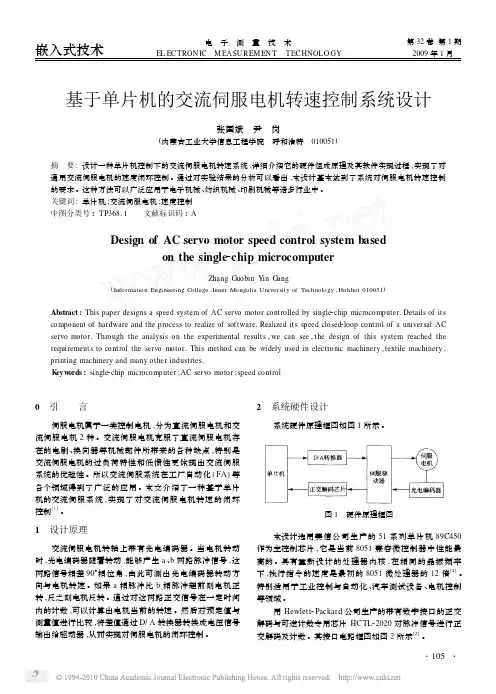
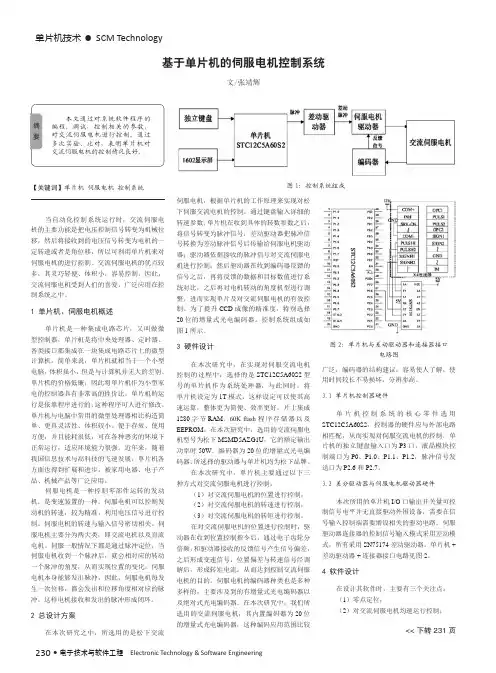
基于单片机的交流伺服电机控制研究【摘要】设计一种单片机控制下的交流伺服电机转速系统,详细介绍它的硬件组成原理及其软件实现过程,实现了对通用交流伺服电机的速度闭环控制。
通过对实验结果的分析可以看出,本设计基本达到了系统对伺服电机转速控制的要求。
【关键词】单片机交流伺服电机由于交流伺服电机具有体积小、重量轻、大转矩输出、低惯量和良好的控制性等优点,因此已被广泛应用于自动控制系统和自动检测系统中。
在自动控制系统中,交流伺服电机的作用是把控制电压信号转换成机械位移,也就是把接收到的电压信号转变成该电机的一定转速或角位移,因此可以用单片机实现对伺服电机的控制。
1 总线驱动、数据、地址锁存及译码电路由于单片机的数据线和低位地址线共用必须加地址锁存器进行低位地址锁存,使用74l5373作为地址锁存器,当应用系统规模过大,扩展所接芯片过多,超过总线的驱动能力时,系统将不能可靠工作,此时应加用总线驱动器来减少读数据的持续时间,使用74ls245作数据驱动器整个系统可扩展的外部数据总共为64k,由于单片机外部数据存贮器和i/o是统一编址的,我们将低32k作为外部扩展的数据存储器,高译码电路采用两片74ls138用了32k作为i/o使用或留给以后扩展用74ls21,74lsll构成。
控制系统采用p89c58单片机作为控制系统处理器,该系列单片机默认1t模式,运算速快,片上集成1280字节ram,60k的flash程序存储器,还有eeprom,可使系统结构更为简单、实用电机选用的是松下的msmd5azg1u型交流伺服电机,额定输出功率50w,内置20位的增量式光电编码器。
驱动器选用的是松下的minasa5系列交流伺服驱动器madht 1505e。
伺服驱动器连接器x4(50脚)作为外部控制信号输入、输出接口,可以接收控制器发送给驱动器的控制指令。
交流伺服电机的控制方式有三种:位置控制、速度控制、转矩控制。
在位置控制模式下,驱动器接收单片机的位置控制指令信号,经电子齿轮分倍频后,在偏差可逆计数器中与反馈脉冲信号比较后形成偏差信号。
基于单片机的伺服电机转速控制系统摘要传统的晶闸管直流调速系统,其控制回路都是采用模拟电子线路构成的,晶闸管触发器多数还是采用分立元件组成的,这使得控制回路的硬件设备极其复杂,安装调试困难,相对故障率较高。
针对传统的晶闸管直流调速系统的一些不足,提出了一种基于单片机的伺服电机转速控制系统的设计方法,并介绍了PID控制算法的设计。
本设计使用AT89C52作为控制芯片,以PI(比例-积分)调节控制算法为基础,采用软件编程产生脉宽比可控的脉宽调制信号,再通过功率放大电路H桥驱动电路来控制伺服电机电枢电压,从而完成对伺服电机转速的调节,达到了较好的控制性能。
同时通过4*4小键盘输入设定的伺服电机转速,用光电编码器来测定伺服电机转速,显示在4位LED 上。
关键词:直流调速;PID控制算法;AT89C52;脉宽调制;伺服电机The Servo Motor Speed Control System Based On MCUAbstractThe conventional DC drive system of SCR, which Control loop is consisting of simulate electronic circuits, and the SCR trigger is mostly made up of the discrete component, so the hardware devices are extremely complex in the Control loop,the installation and trial run difficultly, the relative failure rate is high. To solve the problems, this paper presents one kind design method of the servo motor speed control system based on MCU, and introduces the design of the PID control algorithm.This design uses AT89C52 as the controller chip, takes PI (proportion - integral) regulation control algorithm to be the foundation, adopts software programming to get the signal for Pulse-Width-Modulation, and controls the armature voltage of servo motor through H bridge driving circuit in power amplification electric circuit, thus it completes to adjust the servo motor rotational-speed, and achieves the good control performance. Meanwhile it set s the servo motor rotational-speed through the 4*4 small keyboard, and minutes the speed of the servo motor by the optical encoder, then shows the speed of the servo motor on the 4 LED.Key word: Direct-current speed regulation; PID control algorithm; AT89C52;Pulse-Width-Modulation; Servo motor目录摘要 (I)Abstract (II)第一章引言 (1)1.1 课题的研究背景及意义 (1)1.2 转速控制系统设计目标及技术要求 (3)第二章伺服电机转速控制系统设计 (4)2.1 系统硬件组成原理 (4)2.2 PID控制算法简介 (4)2.2.1 位置式PID控制算法 (6)2.2.2 增量式PID算法 (8)第三章硬件部分的设计 (12)3.1 直流电机调速原理 (12)3.2 PWM波形发生电路 (13)3.2.1 PWM基本原理 (13)3.2.2 PWM信号的产生 (14)3.3 PWM功率放大电路 (15)3.3.1 H桥驱动电路原理 (15)3.3.2 PWM驱动电路原理图 (17)3.4 测速电路 (18)3.5 键盘电路 (19)3.6 LED显示电路 (21)3.7 AT89C52的时钟电路 (23)3.8 AT89C52的复位电路 (24)第四章软件部分的设计 (26)4.1 主程序流程 (27)4.2 PID控制算法程序流程 (28)4.2.1 PID控制算法选择 (28)4.2.2 PID运算控制模块子程序 (29)4.3 按键处理子程序 (30)4.4 键盘扫描程序 (31)4.5 转速采集子程序 (31)4.6 LED显示子程序 (32)结束语 (33)附录A 基于单片机的伺服电机转速控制系统电路图 (34)附录B 源程序 (35)附录C 基于单片机的伺服电机转速控制系统器件一览表 (57)参考文献 (58)致谢 (60)第一章引言1.1 课题的研究背景及意义目前单片机渗透到我们生活的各个领域,几乎很难找到哪个领域没有单片机的踪迹。
基于单片机的电机转速监控系统设计摘要本文设计了一种基于单片机的电机转速监控系统。
通过采集电机的脉冲信号,并利用单片机进行计算和处理,实现了对电机的实时监控和转速测量。
实验结果表明,该系统具有高精度、稳定性和实用性,可以应用于电机转速和运行状态的监测和控制等方面。
关键词:单片机,电机,转速监控,脉冲信号,计算处理AbstractThis paper designs a motor speed monitoring system based on single-chip microcomputer. By collecting the pulse signalof the motor and using the single-chip microcomputer for calculation and processing, real-time monitoring and speed measurement of the motor are realized. The experimentalresults show that the system has high accuracy, stability and practicality, and can be applied to the monitoring andcontrol of motor speed and operation status.Keywords: Single-chip microcomputer, Motor, Speed monitoring, Pulse signal, Calculation and processing1、引言电机是现代工业中广泛应用的一种动力设备,其转速的稳定性和可靠性对于生产效率和工作效果都有着重要的影响。
因此,对于电机运行状态的监测和控制显得尤为重要。
基于单片机的电机转速监控系统可以通过采集电机的脉冲信号,实现对电机的实时监测和转速测量,具有高精度、稳定性和实用性等特点,被广泛应用于电机控制和运行管理等领域。
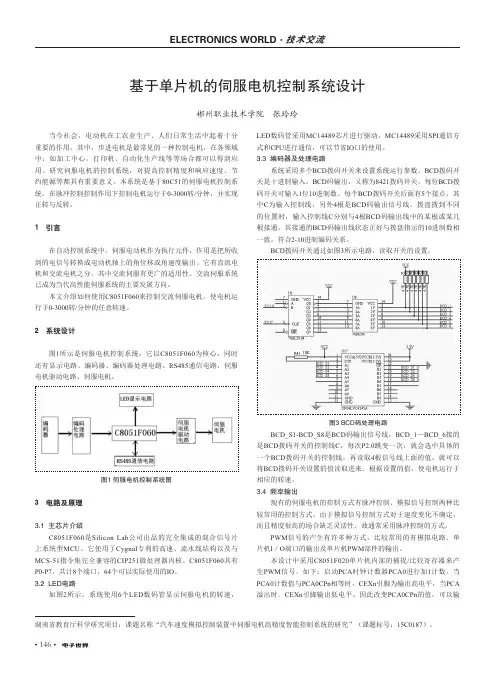
• 146•基于单片机的伺服电机控制系统设计郴州职业技术学院 张玲玲当今社会,电动机在工农业生产、人们日常生活中起着十分重要的作用。
其中,步进电机是最常见的一种控制电机,在各领域中:如加工中心,打印机、自动化生产线等等场合都可以得到应用。
研究伺服电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
本系统是基于80C51的伺服电机控制系统,在脉冲控制控制作用下控制电机运行于0-3000转/分钟,并实现正转与反转。
1 引言在自动控制系统中,伺服电动机作为执行元件,作用是把所收到的电信号转换成电动机轴上的角位移或角速度输出。
它有直流电机和交流电机之分。
其中交流伺服有更广的适用性。
交流伺服系统已成为当代高性能伺服系统的主要发展方向。
本文介绍如何使用C8051F060来控制交流伺服电机,使电机运行于0-3000转/分钟的任意转速。
2 系统设计图1所示是伺服电机控制系统,它以C8051F060为核心,同时还有显示电路、编码器、编码器处理电路、RS485通信电路、伺服电机驱动电路、伺服电机。
图1 伺服电机控制系统图3 电路及原理3.1 主芯片介绍C8051F060是Silicon Lab 公司出品的完全集成的混合信号片上系统型MCU 。
它使用了Cygnal 专利的高速、流水线结构以及与MCS-51指令集完全兼容的CIP251微处理器内核。
C8051F060具有P0-P7,共计8个端口,64个可以实际使用的IO 。
3.2 LED电路如图2所示,系统使用6个LED 数码管显示伺服电机的转速,LED 数码管采用MC14489芯片进行驱动,MC14489采用SPI 通信方式和CPU 进行通信,可以节省IO 口的使用。
3.3 编码器及处理电路系统采用多个BCD 拨码开关来设置系统运行参数。
BCD 拨码开关是十进制输入,BCD 码输出,又称为8421拨码开关。
每位BCD 拨码开关可输入1位10进制数。
每个BCD 拨码开关后面有5个接点,其中C 为输入控制线,另外4根是BCD 码输出信号线。
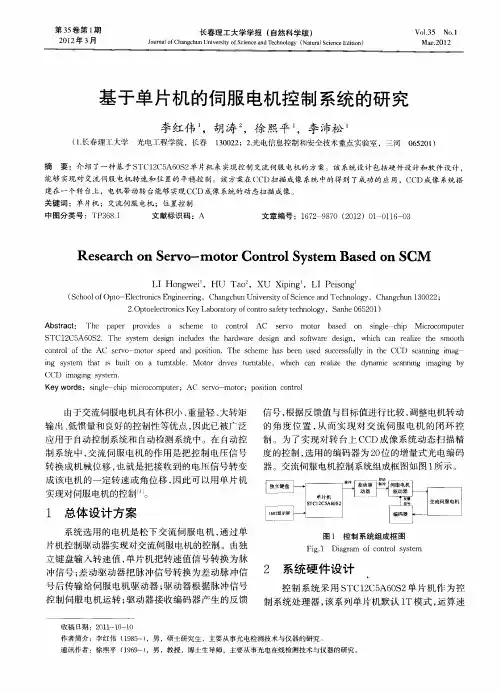
嵌入式技术 电 子 测 量 技 术 EL ECTRON IC M EASU REM EN T TECHNOLO GY 第32卷第1期2009年1月 基于单片机的交流伺服电机转速控制系统设计张国斌 尹 岗(内蒙古工业大学信息工程学院 呼和浩特 010051)摘 要:设计一种单片机控制下的交流伺服电机转速系统,详细介绍它的硬件组成原理及其软件实现过程,实现了对通用交流伺服电机的速度闭环控制。
通过对实验结果的分析可以看出,本设计基本达到了系统对伺服电机转速控制的要求。
这种方法可以广泛应用于电子机械、纺织机械、印刷机械等诸多行业中。
关键词:单片机;交流伺服电机;速度控制中图分类号:TP368.1 文献标识码:ADesign of AC servo motor speed control system basedon the single2chip microcomputerZhang Guobin Y in G ang(Information Engineering College,Inner Mongolia University of Technology,Hohhot010051)Abstract:This paper designs a speed system of AC servo motor controlled by single2chip microcomputer.Details of its component of hardware and the process to realize of software.Realized its speed closed2loop control of a universal AC servo motor.Through the analysis on the experimental results,we can see,the design of this system reached the requirements to control the servo motor.This method can be widely used in electronic machinery,textile machinery, printing machinery and many other industries.K eyw ords:single2chip microcomputer;AC servo motor;speed control0 引 言伺服电机属于一类控制电机,分为直流伺服电机和交流伺服电机2种。
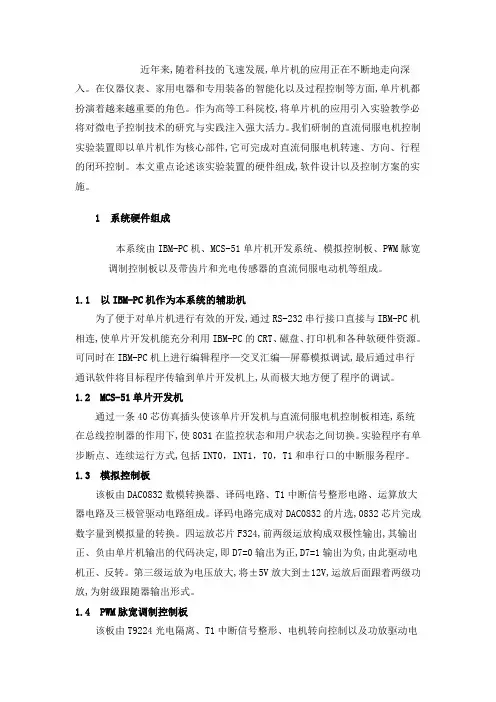
近年来,随着科技的飞速发展,单片机的应用正在不断地走向深入。
在仪器仪表、家用电器和专用装备的智能化以及过程控制等方面,单片机都扮演着越来越重要的角色。
作为高等工科院校,将单片机的应用引入实验教学必将对微电子控制技术的研究与实践注入强大活力。
我们研制的直流伺服电机控制实验装置即以单片机作为核心部件,它可完成对直流伺服电机转速、方向、行程的闭环控制。
本文重点论述该实验装置的硬件组成,软件设计以及控制方案的实施。
1 系统硬件组成本系统由IBM-PC机、MCS-51单片机开发系统、模拟控制板、PWM脉宽调制控制板以及带齿片和光电传感器的直流伺服电动机等组成。
1.1 以IBM-PC机作为本系统的辅助机为了便于对单片机进行有效的开发,通过RS-232串行接口直接与IBM-PC机相连,使单片开发机能充分利用IBM-PC的CRT、磁盘、打印机和各种软硬件资源。
可同时在IBM-PC机上进行编辑程序—交叉汇编—屏幕模拟调试,最后通过串行通讯软件将目标程序传输到单片开发机上,从而极大地方便了程序的调试。
1.2 MCS-51单片开发机通过一条40芯仿真插头使该单片开发机与直流伺服电机控制板相连,系统在总线控制器的作用下,使8031在监控状态和用户状态之间切换。
实验程序有单步断点、连续运行方式,包括INT0,INT1,T0,T1和串行口的中断服务程序。
1.3 模拟控制板该板由DAC0832数模转换器、译码电路、T1中断信号整形电路、运算放大器电路及三极管驱动电路组成。
译码电路完成对DAC0832的片选,0832芯片完成数字量到模拟量的转换。
四运放芯片F324,前两级运放构成双极性输出,其输出正、负由单片机输出的代码决定,即D7=0输出为正,D7=1输出为负,由此驱动电机正、反转。
第三级运放为电压放大,将±5V放大到±12V,运放后面跟着两级功放,为射级跟随器输出形式。
1.4 PWM脉宽调制控制板该板由T9224光电隔离、T1中断信号整形、电机转向控制以及功放驱动电路组成。
基于单片机的伺服电机控制系统分析随着时代的发展社会的进步,科学技术水平日益提高,电动机被普遍应用到了人民的日常生活及工农业生产过程中,发挥了重要作用。
其中较为典型的控制电机应该是步进电机,在当前多个领域如打印机、加工中心、自动化生产线等均可得到有效应用。
本篇文章通过对系统软件的相关程序的设计、调试以及控制有关的参考数,对单片机的伺服电机的控制系统进行分析。
通过大量的实验和对比,来展现了单片机的伺服电机的控制情况良好。
标签:单片机;伺服电机;控制系统分析引言:当自动控制的系统启动时,单片机的伺服电机的马达能够发挥的主要作用是将电压的控制信号转化为机械位置,然后,接下来再把所收集到的电压信号转化为伺服电机的角位移,又或者是一定的转速。
因此,工作人员可以通过使用单片机来控制伺服电机。
单片机的伺服电机具有灵活、轻巧、体积小、控制方便等方面的优势,所以,伺服电机在现如今的生活之中深受到人们的热爱,从而在控制系统中可以得到广泛的应用。
一、单片机以及伺服电机的总论单片机本质上是一种集成电路芯片,又称微型控制器,单片机是一种由中央处理机、计时器、各种接口组合而成的集成电路芯片,简单来说,单片机就是一台小型的电脑,虽然体积小,但计算机和单片机的差别不是很大,并且,单片机具有的价格低廉的优势,所以作为小型家电控制器来说,单片机具有很高的性价比,单片机的运行是依靠程序来进行的,程序可以人为的进行修改[1]。
相比之下,单片机具有结构简单、灵活性强、体积小、储存方便、能耗少等优势,它在各种恶劣条件下都可以正常的运行,具有较强的环境适应力[2]。
近几年来,我国的计算机随着信息技术和尖端技术的快速发展,单机技术也得到了快速发展,它在家电、电子产品、机械产品等领域也得到了扩大和先进。
伺服电机是由控制部件运行的发动机,是其中的一种变速装置,伺服电机可以调节发动机的转动速度,以电压信号来控制,伺服电机的转动速度和输入信号有着密切的关系。
230 •电子技术与软件工程 Electronic Technology & Software Engineering单片机技术• SCM Technology【关键词】单片机 伺服电机 控制系统当自动化控制系统运行时,交流伺服电机的主要功能是把电压控制信号转变为机械位移,然后将接收到的电压信号转变为电机的一定转速或者是角位移,所以可利用单片机来对伺服电机的进行控制。
交流伺服电机的优点较多,其灵巧轻便、体积小,容易控制,因此,交流伺服电机受到人们的喜爱,广泛应用在控制系统之中。
1 单片机、伺服电机概述单片机是一种集成电路芯片,又叫做微型控制器,单片机是将中央处理器、定时器、各类接口都集成在一块集成电路芯片上的微型计算机。
简单来说,单片机就相当于一个小型电脑,体积虽小,但是与计算机并无大的差别。
单片机的价格低廉,因此将单片机作为小型家电的控制器具有非常高的性价比。
单片机的运行是依靠程序进行的,这种程序可人进行修改。
单片机与电脑中常用的微型处理器相比构造简单、更具灵活性、体积较小、便于存放、使用方便,并且能耗很低,可在各种恶劣的环境下正常运行,适应环境能力很强。
近年来,随着我国信息技术与高科技的飞速发展,单片机各方面也得到扩展和进步,被家用电器、电子产品、机械产品等广泛应用。
伺服电机是一种控制零部件运转的发动机,是变速装置的一种。
伺服电机可以控制发动机的转速,较为精准,利用电压信号进行控制。
伺服电机的转速与输入信号密切相关。
伺服电机主要分为两大类,即交流电机以及直流电机。
伺服一般情况下都是通过脉冲定位,当伺服电机收到一个脉冲后,就会相对应的转动一个脉冲的角度,从而实现位置的变化,伺服电机本身能够发出脉冲,因此,伺服电机每发生一次位移,都会发出和位移角度相对应的脉冲,这样电机接收和发出的脉冲形成闭环。
2 总设计方案在本次研究之中,所选用的是松下交流基于单片机的伺服电机控制系统文/张靖辉伺服电机,根据单片机的工作原理来实现对松下伺服交流电机的控制。
基于单片机的伺服电机控制系统设计近年来,随着科技的进步和工业自动化的发展,伺服电机在工业控制系统中的应用越来越广泛。
伺服电机具有精准的位置控制、快速的响应速度和高功率输出等特点,被广泛应用于机器人、数控机床、自动化生产线等领域。
伺服电机控制系统一般由意图生成、控制器和执行器三个部分组成。
其中,意图生成部分主要负责根据控制要求生成输出信号;控制器负责接收输入信号并处理,然后输出控制信号;执行器负责接收控制信号并执行动作。
首先,确定伺服电机的控制要求,包括位置精度、响应速度等。
然后根据要求设计控制器。
控制器可以采用PID控制算法,结合反馈信号进行控制。
在STM32控制器中,可以使用定时器模块的PWM输出来控制电机的转速和方向。
在意图生成部分,可以通过外部设备、按键或编码器等和STM32进行通信,将期望的位置或角度输入到STM32、STM32接收到输入信号后,经过处理后输出控制信号。
在执行器部分,可以选择合适的伺服电机,根据控制信号驱动电机执行动作。
执行器部分可以使用相应的驱动电路来完成。
在整个系统设计过程中,需要注意以下几个方面:
1.系统的稳定性:选择合适的控制算法,在系统中加入合适的反馈信号,使系统具有较好的稳定性和鲁棒性。
2.控制精度:通过合适的传感器和控制算法,保证伺服电机的位置控
制精度和响应速度。
3.电路的设计:合理设计电路,保证信号的稳定性,避免干扰和噪声。
4.保护措施:考虑到伺服电机使用中可能出现的故障,可以加入相应
的保护措施,如过流、过热等保护。
2.伺服电机程序设计流程成图掌管器的软件重要完成零点定位、伺服机电匀速运转、变速运转掌管和喷印长度掌管几项效力,包括主程序、中断服务程序及伺服机电不同运转速率子程序。
由于伺服机电是经历小车带动喷头横向运转的,所以在程序流程图中将伺服机电带动的喷头简称为小车,主程序流程图如图4-1所示,定时/计数器T1中断服务程序流程图如图4-2所示,它完成对定位脉冲PA的加/减计数,以实时掌管小车的运转长度;INT1中断服务程序用于启动T1对PA计数,其流程图略。
最先DNT1检测到MZA正向喷印一行反向喷印一行转A处直到停机命令结束图4-1主程序流程图图4-2 中断服务程序图在速率 掌管体例下,首先经历伺服 启动器设置好相关参数,然后 经历单片机掌 管器软件将掌管器与伺服启动器的接 口信号INH (在内部 速率指令选择1输入有效)和CL (在内部速率指令 选择1 输入有效)置成四种开关配合之 一,以选择一种运 转速率,则伺服启动器将启动伺服机 电按选定的速率运转。
本体系利用两字节的 辨率为220dpi (点/英寸)。
由于伺服机电每次从以喷印速率运转接到停机信号后要 有一 段运转过冲距离方能停止,且过冲距离与升/降速时间设置及喷印速率有关,所以在掌管喷印的经过的中要充分考虑过冲的长度,以估计实 际的最大喷印长度。
按本体系的请求,在1m/s 的喷印速率时,最合理升/降速时间约为390ms ,此时过冲约为250mm 。
掌管器的软 件重要完成液晶显示、汲取键盘输入、伺服机电匀速运转和气阀掌管几项效力,包括主程序、键盘中断服务程序、定时器T0中断服务程序及液晶显示子程序。
在 交流伺服机电掌管 体系中单 片机的重要功用是发生 脉冲序列,它是经历89C51 的P3.1口发送的。
体系软件编制拔取定时器定时中断 发生周期性脉冲序列,不利用软件延时,不占用CPU 。
CPU 在非中断时间内能够办理 其它事件,唯有到了中断时间,启动伺 服机电滚动一步。
第一章绪论 (2)1.1课题研究的目的和意义 (2)1.2国内现状与发展趋势 (2)1.3伺服电机发展历史 (3)2.2伺服电机工作理 (4)第二章伺服电机控制硬件设计 (5)2. 1 AT89C51单片机硬件结构 (5)2.2钟电路设计 (8)2.3复位电路设计 (8)2.4显示电路设计 (8)2.5按键电路设计 (11)2.6控制伺服电机电路设计 (12)第三章系统软件设计 (14)3.1总体设计思想 (14)3.2主程序设计 (15)程序清单 (16)参考文献 (18)半个世纪来,直流伺服控制系统己经在精密数控机床、加工中心、机器人等领域得到了广泛的应用。
随着伺服电动机技术、电力电子技术、计算机控制技术的发展,使得伺服控制系统朝着控制电路数字化和功率器件的模块化的方向发展。
本文介绍了微机直流伺服系统的硬件、软件设计方案。
硬件设计主要包括:总体方案设计、单片机应用系统设计、驱动电路设计和测量电路设计。
软件编制采用模块化的设计方式,主要包括主程序设计及数字控制算法程序的设计。
通过系统的整体设计,完成了系统的基本要求,系统可以稳定的运行。
关键词:伺服系统单片机Abstract For a half of century, the DC servo control system has been widely used in the NC machine tool, machining center, and robot. , etc. With the technical development of servo motor, electronices power and computer control, the servo control system is making towards digitized and modular design. This paper introduces the hardware, software design plan of DC servo control system on microcomputer. The hardware designed includes mainly: the total project design, single-chip computer application system design, drive circuit design and measure circuit design. The software a dots modular design, includes primarily the main procedure design and increases the design of the deal type arithmetic figure PID calculation way procedure. Through the integral design of the system, the completion of the basic requirements of the system, the system can stable operation Keywords: servo system microcontroller第一章绪论1.1课题研究的目的和意义近年来随着物流仓储设备的快速发展,有很多物流仓储设备都选用多功能工 业门机作为大宗货物进出仓库的阀门。
基于89C51单片机的电动机转速控制器设计电动机转速控制器是一种用于控制电动机转速和实现多种功能的设备。
基于89C51单片机的电动机转速控制器可以在自动化设备和机械系统中广泛应用,实现各种精确控制要求。
本文将详细介绍基于89C51单片机的电动机转速控制器的设计原理、系统结构和功能。
一、设计原理电动机转速控制器的主要原理是通过调整电机的电压和电流来改变电机的转速。
基于89C51单片机的电动机转速控制器可以通过控制电机电压和电流的方式来实现对电机转速的精确控制。
通过采集电机转速信号,将实际转速与设定值进行比较,并根据比较结果输出相应的控制信号,调整电机的驱动电压和电流,从而实现对电机转速的控制。
二、系统结构1.89C51单片机:作为控制中心,负责采集和处理转速信号,控制电机驱动电路的工作状态,并输出相应的控制信号。
2.电机驱动电路:负责驱动电机,并根据控制信号调整电机的驱动电压和电流,实现对电机转速的控制。
3.转速采集电路:负责采集电机转速信号,并将采集到的信号传输给89C51单片机进行处理。
4.控制电路:由89C51单片机控制,根据转速信号和设定值进行比较,并输出相应的控制信号,用于调整电机的驱动电压和电流。
5.显示屏:显示电机的实际转速和设定转速的数值,方便用户了解电机的工作状态。
三、功能实现1.转速设定:用户可以通过操作面板上的旋钮或按键设置电机的目标转速。
2.转速控制:根据设定转速和实际转速的比较结果,输出相应的控制信号,调整电机的驱动电压和电流,使电机的实际转速逐渐接近设定转速。
3.转速保护:当电机的实际转速超过一定范围时,控制器会发出警报信号,并停止电机的运行,以防止电机由于超速而受损。
4.转速显示:在显示屏上实时显示电机的实际转速和设定转速。
5.自动控制:可以将电动机转速控制器与其他自动化设备进行连接,实现自动启动和停止功能,提高生产效率。
四、总结基于89C51单片机的电动机转速控制器能够实现对电机转速的精确控制,并具备多种功能,能够满足不同场景和需求的应用要求。
基于单片机的伺服电机转速控制系统摘要传统的晶闸管直流调速系统,其控制回路都是采用模拟电子线路构成的,晶闸管触发器多数还是采用分立元件组成的,这使得控制回路的硬件设备极其复杂,安装调试困难,相对故障率较高。
针对传统的晶闸管直流调速系统的一些不足,提出了一种基于单片机的伺服电机转速控制系统的设计方法,并介绍了PID控制算法的设计。
本设计使用AT89C52作为控制芯片,以PI(比例-积分)调节控制算法为基础,采用软件编程产生脉宽比可控的脉宽调制信号,再通过功率放大电路H桥驱动电路来控制伺服电机电枢电压,从而完成对伺服电机转速的调节,达到了较好的控制性能。
同时通过4*4小键盘输入设定的伺服电机转速,用光电编码器来测定伺服电机转速,显示在4位LED 上。
关键词:直流调速;PID控制算法;AT89C52;脉宽调制;伺服电机The Servo Motor Speed Control System Based On MCUAbstractThe conventional DC drive system of SCR, which Control loop is consisting of simulate electronic circuits, and the SCR trigger is mostly made up of the discrete component, so the hardware devices are extremely complex in the Control loop,the installation and trial run difficultly, the relative failure rate is high. To solve the problems, this paper presents one kind design method of the servo motor speed control system based on MCU, and introduces the design of the PID control algorithm.This design uses AT89C52 as the controller chip, takes PI (proportion - integral) regulation control algorithm to be the foundation, adopts software programming to get the signal for Pulse-Width-Modulation, and controls the armature voltage of servo motor through H bridge driving circuit in power amplification electric circuit, thus it completes to adjust the servo motor rotational-speed, and achieves the good control performance. Meanwhile it set s the servo motor rotational-speed through the 4*4 small keyboard, and minutes the speed of the servo motor by the optical encoder, then shows the speed of the servo motor on the 4 LED.Key word: Direct-current speed regulation; PID control algorithm; AT89C52;Pulse-Width-Modulation; Servo motor目录摘要 (I)Abstract (II)第一章引言 (1)1.1 课题的研究背景及意义 (1)1.2 转速控制系统设计目标及技术要求 (3)第二章伺服电机转速控制系统设计 (4)2.1 系统硬件组成原理 (4)2.2 PID控制算法简介 (4)2.2.1 位置式PID控制算法 (6)2.2.2 增量式PID算法 (8)第三章硬件部分的设计 (12)3.1 直流电机调速原理 (12)3.2 PWM波形发生电路 (13)3.2.1 PWM基本原理 (13)3.2.2 PWM信号的产生 (14)3.3 PWM功率放大电路 (15)3.3.1 H桥驱动电路原理 (15)3.3.2 PWM驱动电路原理图 (17)3.4 测速电路 (18)3.5 键盘电路 (19)3.6 LED显示电路 (21)3.7 AT89C52的时钟电路 (23)3.8 AT89C52的复位电路 (24)第四章软件部分的设计 (26)4.1 主程序流程 (27)4.2 PID控制算法程序流程 (28)4.2.1 PID控制算法选择 (28)4.2.2 PID运算控制模块子程序 (29)4.3 按键处理子程序 (30)4.4 键盘扫描程序 (31)4.5 转速采集子程序 (31)4.6 LED显示子程序 (32)结束语 (33)附录A 基于单片机的伺服电机转速控制系统电路图 (34)附录B 源程序 (35)附录C 基于单片机的伺服电机转速控制系统器件一览表 (57)参考文献 (58)致谢 (60)第一章引言1.1 课题的研究背景及意义目前单片机渗透到我们生活的各个领域,几乎很难找到哪个领域没有单片机的踪迹。
导弹的导航装置,飞机上各种仪表的控制,计算机的网络通讯与数据传输,工业自动化过程的实时控制和数据处理,广泛使用的各种智能IC卡,民用豪华轿车的安全保障系统,录像机、摄像机、全自动洗衣机的控制,以及程控玩具、电子宠物等等,这些都离不开单片机。
更不用说自动控制领域的机器人、智能仪表、医疗器械了。
因此,单片机的学习、开发与应用将造就一批计算机应用与智能化控制的科学家、工程师。
单片机广泛应用于仪器仪表、家用电器、医用设备、航空航天、专用设备的智能化管理及过程控制等领域,大致可分如下几个范畴:1.在智能仪器仪表上的应用单片机具有体积小、功耗低、控制功能强、扩展灵活、微型化和使用方便等优点,广泛应用于仪器仪表中,结合不同类型的传感器,可实现诸如电压、功率、频率、湿度、温度、流量、速度、厚度、角度、长度、硬度、元素、压力等物理量的测量。
采用单片机控制使得仪器仪表数字化、智能化、微型化,且功能比起采用电子或数字电路更加强大。
例如精密的测量设备(功率计,示波器,各种分析仪)。
2.在工业控制中的应用用单片机可以构成形式多样的控制系统、数据采集系统。
例如工厂流水线的智能化管理,电梯智能化控制、各种报警系统,与计算机联网构成二级控制系统等。
3.在家用电器中的应用可以这样说,现在的家用电器基本上都采用了单片机控制,从电饭褒、洗衣机、电冰箱、空调机、彩电、其他音响视频器材、再到电子秤量设备,五花八门,无所不在。
4.在计算机网络和通信领域中的应用现代的单片机普遍具备通信接口,可以很方便地与计算机进行数据通信,为在计算机网络和通信设备间的应用提供了极好的物质条件,现在的通信设备基本上都实现了单片机智能控制,从手机,电话机、小型程控交换机、楼宇自动通信呼叫系统、列车无线通信、再到日常工作中随处可见的移动电话,集群移动通信,无线电对讲机等。
5.单片机在医用设备领域中的应用单片机在医用设备中的用途亦相当广泛,例如医用呼吸机,各种分析仪,监护仪,超声诊断设备及病床呼叫系统等等。
6.在各种大型电器中的模块化应用某些专用单片机设计用于实现特定功能,从而在各种电路中进行模块化应用,而不要求使用人员了解其内部结构。
如音乐集成单片机,看似简单的功能,微缩在纯电子芯片中(有别于磁带机的原理),就需要复杂的类似于计算机的原理。
如:音乐信号以数字的形式存于存储器中(类似于ROM),由微控制器读出,转化为模拟音乐电信号(类似于声卡)。
在大型电路中,这种模块化应用极大地缩小了体积,简化了电路,降低了损坏、错误率,也方便于更换。
此外,单片机在工商,金融,科研、教育,国防航空航天等领域都有着十分广泛的用途。
1.2 转速控制系统设计目标及技术要求本设计的目的是实现伺服电机转速的控制。
本设计完成后要求可以实现键盘输入,控制PWM波形产生,实现脉宽调制,软件实现PID控制算法,驱动电路的设计,实现伺服电机转速的调节,显示。
第二章伺服电机转速控制系统设计2.1 系统硬件组成原理转速控制系统的硬件原理框图2-1如图所示:单片机AT89C52显示电路键盘H桥驱动电路光电编码器伺服电机图2-1 转速控制系统硬件原理框图以AT89C52单片机为控制核心,包括键盘电路,测速电路,PWM功放电路,显示电路。
2.2 PID控制算法简介在过程控制中,按偏差的比例(P)、积分(I)和微分(D)进行控制的PID 控制器(亦称PID调节器)是应用最为广泛的一种自动控制器。
它具有原理简单,易于实现,适用面广,控制参数相互独立,参数的选定比较简单等优点;而且在理论上可以证明,对于过程控制的典型对象──“一阶滞后+纯滞后”与“二阶滞后+纯滞后”的控制对象,PID控制器是一种最优控制。
PID调节规律是连续系统动态品质校正的一种有效方法,它的参数整定方式简便,结构改变灵活(PI、PD、…)。
PID控制器包括比例、积分和微分三部分,其控制原理图如图2-2所示:图2-2 典型PID控制结构比例(P)控制是一种最简单的控制方式,其控制器的输出与输入误差成比例的关系。
系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。
比例作用越大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。
积分(I)控制是消除系统的稳态误差,提高无差度。
如果系统有误差,积分调节就进行直至无误差,积分调节停止,积分调节输出为常值。
积分作用的强弱取决与积分时间常数T i,若T i越小,积分作用就越强,反之T i越大则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。
微分(D)控制反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,己被微分调节作用消除。
因此,微分调节可以改善系统的动态性能。
在微分时间选择合适情况下,可以减少超调,减少调节时间。
另外微分作用对噪声干扰有放大作用,因此过强的加微分调节,对系统抗干扰不利。
下面对控制点所采用的PID控制算法进行说明。
控制点目前包含两种比较简单的数字PID控制算法,分别是:位置式算法,增量式算法。