交通灯各模块设计
- 格式:doc
- 大小:163.00 KB
- 文档页数:9


51单片机交通灯毕业设计方案
以下是一个基于51单片机的交通灯设计方案:
1. 硬件设计:
- 使用51单片机作为主控制器。
- 使用红黄蓝三个LED作为信号灯的显示器件。
- 使用按钮作为手动触发信号灯切换的输入设备。
- 使用数码管显示当前信号灯状态的计时器。
- 使用适当的电阻、电容、继电器等连接单片机和LED、按钮、数码管等。
2. 软件设计:
- 配置51单片机的I/O口,将LED、按钮和数码管连接到正
确的引脚。
- 编写主程序,设置中断或轮询等方式读取按钮状态,并根
据按钮状态切换信号灯状态。
- 通过控制LED引脚的输出电平,实现红黄蓝三个信号灯的
闪烁、亮灭和切换。
- 使用定时器计时,实现信号灯的定时控制。
根据交通规则,红灯、黄灯、绿灯的显示时间可以根据需要设定。
- 使用数码管显示当前信号灯的状态和剩余时间,方便车辆
和行人了解交通灯变化。
3. 功能设计:
- 根据交通规则,设置交通灯的变换顺序和时间,确保道路
的交通流畅和安全。
- 根据需要加入手动触发信号灯切换的功能,允许人工控制,
例如紧急情况下的交通调节。
- 可以考虑加入流量检测、车辆和行人优先等功能,提高交
通效率和安全性。
- 可以通过串口或无线通信模块,实现与其他设备的联动,
例如与车载导航系统、交通监控系统等的数据交换和协同控制。
以上是一个基本的51单片机交通灯设计方案,可以根据具体
需求进行进一步调整和优化。
基于STM32的智能交通灯系统设计智能交通灯系统是一个基于STM32的控制系统,旨在改善交通流量管理和道路安全。
它利用STM32的高性能微控制器和实时操作系统,提供智能化的交通信号控制,可以根据实时交通状况进行灵活调整,从而最大限度地提高交通流量并减少交通拥堵。
该系统由以下几个主要组成部分组成:1. STM32微控制器:作为系统的核心,STM32微控制器采用先进的ARM Cortex-M处理器架构和强大的计算能力,用于控制信号灯的状态和计时功能,同时可以通过与其他传感器和设备的接口进行通信。
2.交通感应器:交通感应器通常包括车辆和行人检测器。
车辆检测器使用电磁或光电等技术监测车辆的存在和通过情况,行人检测器则使用红外传感器等技术检测行人的存在。
通过与STM32微控制器的接口,感应器可以将实时交通信息传输到控制系统中进行处理。
3. 通信模块:为了实现智能化的交通信号控制,交通灯系统与其他交通系统和设备之间需要进行数据交互。
通信模块使用嵌入式网络协议,如CAN或Ethernet,与其他交通设备进行通信,以便接收实时交通信息并将交通信号优化策略传输回控制系统。
4.人机交互界面:人机交互界面通常是一个触摸屏或面板,用于设置和调整交通信号控制的参数,以及显示交通信息和各个信号灯的状态。
通过与STM32微控制器的接口,人机交互界面可以实现与控制系统的交互。
系统的工作原理如下:1.交通感应器将车辆和行人的存在和通过情况传输到STM32微控制器。
2.STM32微控制器根据收到的交通信息,结合预设的交通信号控制策略,确定各个信号灯的状态和计时。
3.STM32微控制器通过通信模块与其他交通设备进行通信,接收实时交通信息,并将交通信号优化策略传输回控制系统。
4.人机交互界面用于设置和调整交通信号控制的参数,以及显示交通信息和各个信号灯的状态。
智能交通灯系统的设计目标是提高道路交通管理的效率和安全性。
通过实时监测交通情况,并根据实际需要进行灵活调整交通信号,可以减少交通拥堵和行车事故的发生。
目录1设计任务及指标 (1)2交通灯控制电路分析 (2)2.1交通灯运行状态分析 (2)2.2电路工作总体框图 (3)2.3方案比较 (3)3交通灯控制电路设计 (4)3.1 电源电路 (4)3.2 脉冲电路 (4)3.3 分频电路 (6)3.4 倒计时电路 (6)3.5 状态控制电路 (8)3.6 灯显示电路 (9)3.7 总体电路图 (11)4实验数据和误差分析 (12)5课程设计的收获、体会和建议 (13)6致谢 (16)7参考文献 (17)8附录 (18)1 设计任务及指标设计一个东西方向和南北方向十字路口的交通灯控制电路。
要求如下:(1)南北方向(主干道)车道和东西方向(支干道)车道两条交叉道路上的车辆交替运行,主干道每次通行时间都设为30s、支干道每次通行间为20s;(2)东西方向、南北方向车道除了有红、黄、绿灯指示外,每一种灯亮的时间都用显示器进行显示(采用倒计时的方法);(3)在绿灯转为红灯时,要求黄灯先亮5s钟,才能变换运行车道;(4)黄灯亮时,要求每秒闪亮一次;(5)同步设置人行横道红、绿灯指示。
(6)设计相关提示:所设计的交通路口为一十字路口,不涉及左右转弯问题。
2 交通灯控制电路分析2.1 交通灯运行状态分析交通灯控制电路,要求每个方向有三盏灯,分别为红、黄、绿,配以红、黄、绿三组时间到计时显示。
一个方向绿灯、黄灯亮时,另一个方向红灯亮。
每盏灯顺序点亮,循环往复,每个方向顺序为绿灯、黄灯、红灯。
交通灯的运行状态共有四种,分别为:状态0:东西方向车道的绿灯亮,车道,人行道通行;南北方向车道的红灯亮,车道,人行道禁止通行。
状态1:东西方向车道的黄灯亮,车道,人行道缓行;南北方向车道的红灯亮,车道,人行道禁止通行;状态2:东西方向车道的红灯亮,车道,人行道禁止通行;南北方向车道的绿灯亮,车道,人行道通行;状态3:东西方向车道的红灯亮,车道,人行道禁止通行;南北方向车道的黄灯亮,车道,人行道缓行;4种状态循环往复,并且红灯的倒计初始值为绿灯的倒计初始值和黄灯的倒计初始值之和。

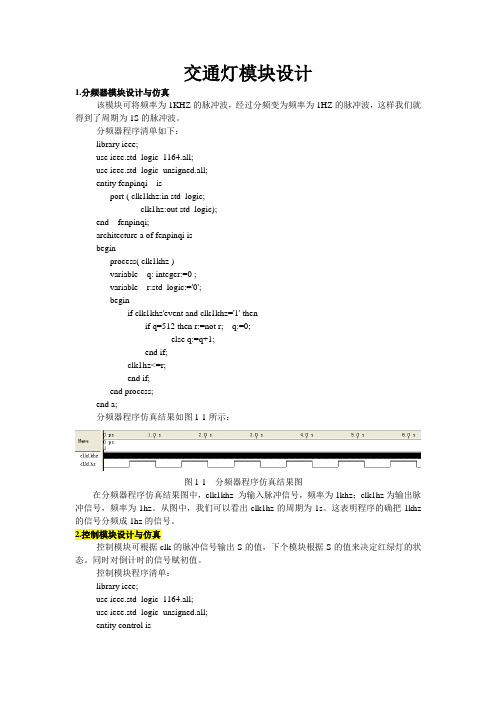
交通灯模块设计1.分频器模块设计与仿真该模块可将频率为1KHZ的脉冲波,经过分频变为频率为1HZ的脉冲波,这样我们就得到了周期为1S的脉冲波。
分频器程序清单如下:library ieee;use ieee.std_logic_1164.all;use ieee.std_logic_unsigned.all;entity fenpinqi isport ( clk1khz:in std_logic;clk1hz:out std_logic);end fenpinqi;architecture a of fenpinqi isbeginprocess( clk1khz )variable q: integer:=0 ;variable r:std_logic:='0';beginif clk1khz'event and clk1khz='1' thenif q=512 then r:=not r; q:=0;else q:=q+1;end if;clk1hz<=r;end if;end process;end a;分频器程序仿真结果如图1-1所示:图1-1 分频器程序仿真结果图在分频器程序仿真结果图中,clk1khz 为输入脉冲信号,频率为1khz;clk1hz为输出脉冲信号,频率为1hz。
从图中,我们可以看出clk1hz的周期为1s。
这表明程序的确把1khz 的信号分频成1hz的信号。
2.控制模块设计与仿真控制模块可根据clk的脉冲信号输出S的值,下个模块根据S的值来决定红绿灯的状态。
同时对倒计时的信号赋初值。
控制模块程序清单:library ieee;use ieee.std_logic_1164.all;use ieee.std_logic_unsigned.all;entity control isport( clk:in std_logic;s:out std_logic_vector(2 downto 0);loadat,loadbt:out std_logic;at,bt:out integer range 0 to 80);end control;architecture a of control issignal t:integer;beginprocess(clk)beginif clk'event and clk='1' thenloadat<='0';loadbt<='0';if t=0 then s<="000"; at<=80; loadat<='1';elsif t=15 then s<="001"; bt<=45; loadbt<='1';elsif t=60 then s<="010";elsif t=65 then s<="011"; bt<=80; loadbt<='1';elsif t=80 then s<="100"; at<=45; loadat<='1';elsif t=125 then s<="101";end if;t<=t+1;end if;if t=130 then t<=0; end if;end process;end a;控制模块程序仿真结果如图3-5所示:图3-5 控制模块程序仿真结果图在控制模块程序仿真结果图中,只有一个输入信号clk,它是一个频率为1hz的时钟脉冲信号,输出信号有3个分别是s、at、bt。
交通灯控制电路设计简介交通灯是每个城市道路上必不可少的设备,用于管理和控制车辆和行人的通行。
交通灯控制电路是交通灯正常运行的关键组成部分,它负责将电力信号转换为特定的灯光组合,在不同的情况下精确控制交通流量。
本文档将介绍交通灯控制电路的设计原理、主要组成部分和操作逻辑。
设计原理交通灯控制电路的设计原理基于以下几个主要方面:1.电源供应:交通灯控制电路需要一个稳定可靠的电源供应,以确保交通灯可以持续运行。
通常使用交流电源或直流电源,具体根据实际情况来确定。
2.时序控制:交通灯按照预定的时间序列切换灯光状态。
通过精确的时间计时器和逻辑控制电路,控制不同方向的交通灯按照预设的时间间隔进行切换。
3.灯光控制:根据交通信号灯的功能需求,设计灯光控制电路。
典型的交通信号灯包括红色、黄色和绿色灯。
灯光控制电路需要能够根据时序控制信号切换相应的灯光状态。
4.状态检测:交通灯控制电路还需能够检测交通流量和故障情况。
例如,当检测到交通流量较大时,交通灯应能自动调整时间间隔以适应道路状况。
主要组成部分交通灯控制电路通常由以下主要组成部分构成:1.电源模块:电源模块负责提供稳定的电源供应,可以包括电源适配器、稳压电路和滤波电路等。
2.控制单元:控制单元是交通灯控制电路的核心部分,负责协调各个信号灯的状态变化。
它通常由计时器、逻辑门电路和触发器等元件组成。
3.灯光模块:灯光模块包括红色、黄色和绿色交通信号灯。
每个信号灯使用一个独立的LED或灯泡,通过控制电路切换不同的灯光状态。
4.传感器模块:传感器模块用于检测交通流量和故障情况。
常见的传感器包括车辆检测器和故障检测器。
操作逻辑交通灯控制电路的操作逻辑可以简单描述如下:1.初始化:交通灯控制电路在启动时进行初始化。
将所有信号灯设置为红色,并开始计时。
2.时间切换:按照预设的时间序列,在设定的时间间隔内,依次切换信号灯的状态。
例如,绿灯亮10秒、黄灯亮5秒、红灯亮20秒。
3.交通流量检测:控制单元通过连接的车辆检测器检测交通流量。
交通灯PLC控制系统设计交通灯是城市交通管理的重要组成部分,交通灯控制系统的设计对于保障交通安全和优化交通流量起着关键作用。
PLC(可编程逻辑控制器)技术在交通灯控制系统中得到了广泛应用,本文将从系统设计的整体框架、PLC程序设计、硬件选型以及系统特点等方面来详细介绍。
交通灯PLC控制系统设计的整体框架主要包括信号采集模块、信号处理模块、控制模块和执行模块四部分。
信号采集模块主要负责将交通流量、行人流量等信息转化为电信号输入给PLC控制器;信号处理模块对采集到的信号进行处理,如检测交通流量的高低以及行人通过的情况;控制模块根据信号处理结果,生成控制信号输出给执行模块;执行模块实现交通灯的控制,通过电路和执行器实现交通灯的开关。
PLC程序设计是交通灯PLC控制系统设计的核心部分,主要包括输入端口设置、控制逻辑设计、输出端口设置和通信设置等。
在输入端口设置中,确定采集到的数据类型和数据源,如交通流量和行人流量分别通过传感器采集。
控制逻辑设计是根据交通灯的状态和信号控制规则确定交通灯的控制方式,比如根据交通流量高低切换交通灯的状态。
输出端口设置是将确定好的控制信号输出到对应的执行模块,如输出信号控制交通灯的红绿灯状态。
通信设置是实现与其他相关系统的联动,如与监控系统的数据交互。
硬件选型是交通灯PLC控制系统设计的重要环节,主要包括PLC控制器、传感器、执行器和电源等。
PLC控制器应该具有高性能、稳定可靠的特点,能够满足交通灯控制系统的需求。
传感器的选型应基于交通流量和行人流量的检测需求,常用的有光电传感器、气压感应器等。
执行器的选型应根据交通灯的类型确定,如LED灯管、数码管等。
电源的选型应满足交通灯控制系统的供电需求,选用稳定可靠的电源。
交通灯PLC控制系统设计具有以下特点:灵活性高、可靠性强、实时性好。
PLC控制器的可编程性使得交通灯的控制逻辑可以根据实际需求进行灵活调整,满足不同时间段的交通流量要求。
PLC的智能交通灯控制系统设计智能交通灯控制系统设计是一种基于PLC技术的智能化交通管理系统,通过对交通信号灯控制进行智能化优化,实现交通流量的合理分配和交通管控的智能化管理,在提高道路通行效率的同时确保交通安全。
本文将介绍智能交通灯控制系统的设计理念、系统架构、功能模块、硬件设备和软件编程等方面。
一、设计理念智能交通灯控制系统的设计理念是通过PLC技术实现对交通信号灯的智能控制,根据车辆流量和道路情况实时调整信号灯的变化,合理分配绿灯时间,优化交通信号配时方案,提高道路通行效率和交通安全性。
系统应具有智能化、自适应性和实时响应性,能够有效应对不同交通情况,提供个性化的交通管控解决方案。
二、系统架构智能交通灯控制系统的架构主要包括传感器模块、PLC控制器、交通信号灯、通信模块和监控终端等部分。
传感器模块用于感知道路上的车辆流量和行驶方向等信息,将数据传输给PLC控制器;PLC控制器根据传感器数据实时调整信号灯控制策略;交通信号灯根据PLC控制器的指令变化显示不同颜色信号;通信模块用于系统与监控终端之间的数据通信,监控终端用于监控系统运行状态和实时操作。
三、功能模块智能交通灯控制系统的功能模块包括车辆检测模块、信号灯控制模块、通信模块和监控模块等。
车辆检测模块通过车辆检测器实时感知道路上的车辆流量和行驶方向等信息;信号灯控制模块根据车辆检测模块的数据智能调整信号灯配时,实现绿灯优先和拥堵车辆识别等功能;通信模块提供系统与监控终端之间的数据传输通道,实现数据交换和远程监控;监控模块实时监测系统运行状态和信号灯显示情况,可对系统进行远程操作和管理。
四、硬件设备智能交通灯控制系统的硬件设备主要包括传感器、PLC控制器、交通信号灯、通信模块和监控终端等部分。
传感器用于感知车辆流量和行驶方向等信息;PLC控制器用于处理传感器数据,实现信号灯的智能控制;交通信号灯显示不同颜色信号,指示不同车辆通行状态;通信模块提供系统与监控终端之间的数据传输通道;监控终端用于监控系统运行状态和实时操作。
西安郵電學院硬件课程设计报告题目:微机原理与接口课程设计;^院系名称:计算机学院专业名称:软件工程班级:软件0802学生姓名:王晶晶学号(8位): 04085047指导教师:刘军设计起止时间:2011年05月23日~2011年05月27日[一、设计目的通过可编程并行接口芯片8255A和可编程定时器/计数器芯片8253/8254以及中断控制器 8259实现十字路口交通灯的模拟控制,进一步掌握并行接口和定时器/计数器及数码管控制的实际应用。
二、设计内容1.用试验台提供的发光二极管(红绿黄各两支,共六支)作为南北路口(红绿黄各一支)和东西路口(红绿黄各一支)的模拟交通灯。
2.用可编程并行接口芯片8255A控制模拟交通灯的亮与灭和数码管的倒计时显示。
3.用可编程定时器/计数器芯片8253实现模拟交通灯亮与灭的时间延迟控制。
4.用数码管作为模拟交通灯亮与灭的时间延迟控制的倒计时显示。
'5.用汇编语言编程使六个灯按交通灯变化规律“亮/灭”。
交通灯变化规律要求:① 南北路口的绿灯,东西路口的红灯同时亮30秒,且数码管30秒倒计时显示。
② 南北路口的黄灯闪烁3秒(三亮三灭),同时东西路口的红灯继续亮,且数码管3秒倒计时显示。
③ 南北路口的红灯,东西路口的绿灯同时亮20秒,且数码管20秒倒计时显示。
④ 南北路口的红灯继续亮,同时东西路口的黄灯闪烁3秒(三亮三灭),且数码管3秒倒计时显示。
⑤ 转①重复⑥按压“东西紧急键”,则东西方向绿灯,南北方向红灯;再次按压“东西紧急键”,解除东西紧急通行状态。
(“东西紧急键”可是键盘键,亦可是逻辑开关键)⑦按压“南北紧急键”,则南北方向绿灯,东西方向红灯;再次按压“南北紧急键”,解除南北紧急通行状态。
(“南北紧急键”可是键盘键,亦可是逻辑开关键)"⑧按 <ESC>键退出程序。
备注:1、按键用 8255A 芯片的 PC 口实现或用键盘模拟实现。
2、8253定时到可以通过8259,用中断的方式实现定时器。
交通灯模块设计1.分频器模块设计与仿真该模块可将频率为1KHZ的脉冲波,经过分频变为频率为1HZ的脉冲波,这样我们就得到了周期为1S的脉冲波。
分频器程序清单如下:library ieee;use ieee.std_logic_1164.all;use ieee.std_logic_unsigned.all;entity fenpinqi isport ( clk1khz:in std_logic;clk1hz:out std_logic);end fenpinqi;architecture a of fenpinqi isbeginprocess( clk1khz )variable q: integer:=0 ;variable r:std_logic:='0';beginif clk1khz'event and clk1khz='1' thenif q=512 then r:=not r; q:=0;else q:=q+1;end if;clk1hz<=r;end if;end process;end a;分频器程序仿真结果如图1-1所示:图1-1 分频器程序仿真结果图在分频器程序仿真结果图中,clk1khz 为输入脉冲信号,频率为1khz;clk1hz为输出脉冲信号,频率为1hz。
从图中,我们可以看出clk1hz的周期为1s。
这表明程序的确把1khz 的信号分频成1hz的信号。
2.控制模块设计与仿真控制模块可根据clk的脉冲信号输出S的值,下个模块根据S的值来决定红绿灯的状态。
同时对倒计时的信号赋初值。
控制模块程序清单:library ieee;use ieee.std_logic_1164.all;use ieee.std_logic_unsigned.all;entity control isport( clk:in std_logic;s:out std_logic_vector(2 downto 0);loadat,loadbt:out std_logic;at,bt:out integer range 0 to 80);end control;architecture a of control issignal t:integer;beginprocess(clk)beginif clk'event and clk='1' thenloadat<='0';loadbt<='0';if t=0 then s<="000"; at<=80; loadat<='1';elsif t=15 then s<="001"; bt<=45; loadbt<='1';elsif t=60 then s<="010";elsif t=65 then s<="011"; bt<=80; loadbt<='1';elsif t=80 then s<="100"; at<=45; loadat<='1';elsif t=125 then s<="101";end if;t<=t+1;end if;if t=130 then t<=0; end if;end process;end a;控制模块程序仿真结果如图3-5所示:图3-5 控制模块程序仿真结果图在控制模块程序仿真结果图中,只有一个输入信号clk,它是一个频率为1hz的时钟脉冲信号,输出信号有3个分别是s、at、bt。
程序中,通过变量t的值来确定输出信号s的值,并由此确定将要赋得倒计时的初值,然后赋给at,bt。
在每次给at,bt赋值时,都会使另一个输出信号loadat,loadbt变成高电平,从而可以触发下一模块的装载。
3.倒计时模块设计与仿真倒计时模块用来接收控制模块的输出作为初值,并进行减一操作,最后把减一得结果输出。
程序里每检测到一个脉冲clk,就进行一次减一操作。
倒计时模块程序清单:library ieee;use ieee.std_logic_1164.all;use ieee.std_logic_unsigned.all;entity atdaojishi isport ( clk,loadat:in std_logic;atin:in integer range 0 to 80;atout:out integer range 0 to 80);end atdaojishi;architecture a of atdaojishi issignal countat:integer range 0 to 80;beginprocessbeginwait until rising_edge(clk);if loadat='1' then countat<=atin;else countat<=countat-1;end if;end process;atout<=countat;end a;倒计时模块程序仿真结果如图1-3所示:图1-3 倒计时模块程序仿真结果图在倒计时模块程序仿真结果图中,clk为1hz的输入信号,loadat为at计数器的装载信号,当loadat为高电平时,将输入信号atin的值装载到计数器中,开始执行减一操作,每接受一次clk,执行一次,并将结果输出。
4.主模块设计主模块可根据输入的S信号,输出对应的红绿灯信号。
直接改变并驱动红绿灯的亮和灭。
主模块程序清单:library ieee;use ieee.std_logic_1164.all;use ieee.std_logic_unsigned.all;entity main isport ( s:in std_logic_vector(2 downto 0);lrgy:out std_logic_vector(7 downto 0));end main;architecture a of main isbeginprocess(s)variable b:std_logic_vector(7 downto 0);begincase s iswhen "000" => b:="01001100";when "001" => b:="01000010";when "010" => b:="01000001";when "011" => b:="11000100";when "100" => b:="00100100";when "101" => b:="00010100";when others => b:="00000000";end case;lrgy<=b;end process;end a;主模块程序仿真结果如图1-4所示:图3-8 main模块程序仿真结果图在主模块程序仿真结果图中,S为输入信号,用来表明整个红绿灯的状态(一共6个状态:S0~S5); lrgy为输出信号,代表整个红绿灯的亮和灭的情况,灯的排序从高位到低位排列,方向上是先东西方向,后南北方向。
也就是说,序列为:东西方向左转灯、红灯、绿灯、黄灯,然后南北方向左转灯、红灯、绿灯、黄灯。
从图中我们可以看出S的状态从“000”到“101”,共六个状态,每一个状态都对应相应的红绿灯亮灭的状态,仿真结果完全正确,符合预期。
5.译码模块设计与仿真译码程序将输入的用来显示的两位倒计时数值,分解成四个整形的数值,以供后面的译码显示模块继续译码显示。
译码程序清单如下:library ieee;use ieee.std_logic_1164.all;use ieee.std_logic_unsigned.all;entity to8421bcd isport( at,bt:in integer range 0 to 80;aout1,aout2,bout1,bout2:out integer range 0 to 9);end to8421bcd;architecture a of to8421bcd isbeginprocess (at,bt)beginif at>=70 thenaout1<=7;aout2<=at-70;elsif at>=60 thenaout1<=6;aout2<=at-60;elsif at>=50 thenaout1<=5;aout2<=at-50; elsif at>=40 thenaout1<=4;aout2<=at-40; elsif at>=30 thenaout1<=3;aout2<=at-30; elsif at>=20 thenaout1<=2;aout2<=at-20; elsif at>=10 thenaout1<=1;aout2<=at-10; elsif at>=0 thenaout1<=0;aout2<=at; end if;if bt>=70 thenbout1<=7;bout2<=bt-70; elsif bt>=60 thenbout1<=6;bout2<=bt-60; elsif bt>=50 thenbout1<=5;bout2<=bt-50; elsif bt>=40 thenbout1<=4;bout2<=bt-40; elsif bt>=30 thenbout1<=3;bout2<=bt-30; elsif bt>=20 thenbout1<=2;bout2<=bt-20; elsif bt>=10 thenbout1<=1;bout2<=bt-10; elsif bt>=0 thenbout1<=0;bout2<=bt; end if;end process;end a;译码程序仿真结果如图1-5 所示:图1-5 译码程序仿真结果图在译码程序仿真结果图中,at,bt为输入信号,at,bt的范围为0~80。