华南理工大学833自控综合真题参考答案(4)
- 格式:pdf
- 大小:18.86 MB
- 文档页数:5

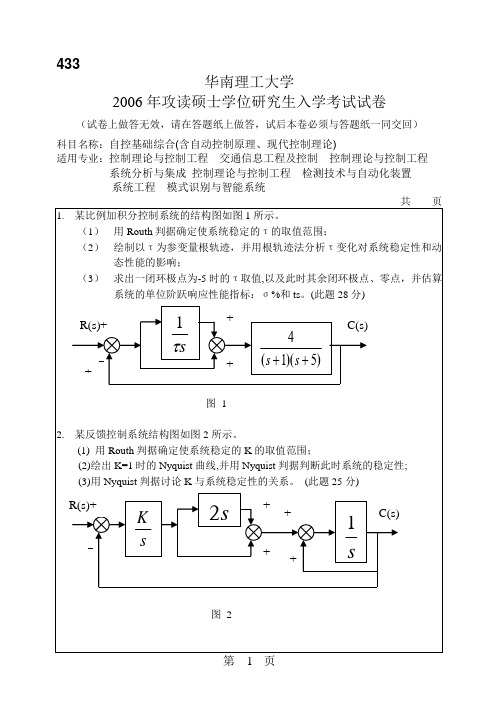
433华南理工大学2004年攻读硕士学位研究生入学考试试卷(试卷上做答无效,请在答题纸上做答,试后本卷必须与答题纸一同交回)科目名称:自控基础综合适用专业:控制理论与控制工程、交通信息工程及控制、系统分析与集成、检测技术与自动化装置、系统工程、模式识别与智共页第一部分 自动控制原理(必答题,共100分)1 已知某自整角机随动系统如图-1所示。
其中,自整角机检测装置、交流放大器的传递函数分别为,交流伺服电动机和减速器的传递21K K 和函数为,交流测速发电机的传递函数为,)1()()(30+=Ts s K s U s a θ4)()(K s s U f =Ω减速器的减速比为。
要求: (共20分))1( 21<=Z Z i i 1 绘出系统的结构图; 2 求出系统的传递函数;)()(s s i o θθ 3 求出系统在给定速度输入信号作用下的稳态误差。
t t i 2)(=θss e2、已知单位反馈系统的开环传递函数为:,当)0( , )()2()(2>++=a a s s s K s G g a取不同数值时,变化时的系统根轨迹可能有二个分离点、一个分∞~0由g K 离点,或无分离点(的点除外)。
要求: (共20分)0=s 1 绘出几种有代表性的根轨迹大致图形; 2 图解讨论的取值对系统稳定性的影响。
a 3、某单位反馈系统(最小相位系统)在时的开环幅相频率特性1=K )(ωj G 曲线如图-2所示。
要求: (共20分) 1 判断该系统的稳定性; 2 确定使系统稳定时开环放大系数K 的取值范围(设)。
0>K。

833
华南理工大学
2010年攻读硕士学位研究生入学考试试卷(请在答题纸上做答,试卷上做答无效,试后本卷必须与答题纸一同交回)
科目名称:自控基础综合(含自动控制原理、现代控制理论)
适用专业:系统分析与集成,控制理论与控制工程,检测技术与自动化装置,系统工程,模式识别与智能系统,交通信息工程及控制,控制工程
图3 求出系统的开环传递函数G(s);
求出系统的截止频率ωc和相角裕量γ。
5. (25分)已知某系统为单位负反馈最小相位系统,实验测得该系统的开
环对数频率特性如图4所示。
(计算保留1位小数)
1) 试绘制该系统的开环幅相特性曲线,标注走向,与实轴交点;
2) 用奈式判据判断该系统的稳定性,说明闭环极点的个数和大致位置;
3) 如系统的开环放大系数K 可变,试确定使系统稳定的K 的范围;
4) 如果要求系统稳态性能基本不变,相角裕度大于40°,截止频率降低,
应如何校正系统,为什么?
图4
6. (20分)为改善系统的性能,现采用图5(a)所示的变增益控制。
图中是
非线性校正装置,其特性如图5(b)所示。
n k 1) 当K=0.5时,写出系统在阶跃输入下的误差微分方程;
2) 试用奇点变化来讨论变增益控制对系统动态性能的影响;
3) 若将非线性校正装置换为采样周期为T n k s 的采样开关,试分析开环放
大系数K 要满足什么条件,系统才能稳定。
(a) (b)。

第一章绪论当前页有10题,你已做10题,已提交10题,其中答对10题。
1. 闭环系统的特点不包含下列哪项()。
A •负反馈B •控制精度较低C .可减少或消除偏差D .适应性好答题:' A. '* B. ' C. D.(已提交)参考答案:B问题解析:2. 系统采用负反馈形式连接后,则()。
A•一定能使闭环系统稳定B •系统动态性能一定会提高C •一定能使干扰引起的误差逐渐减小,最后完全消除D •需要调整系统的结构参数,才能改善系统性能答题:A.釦” [2|c. ^M D.(已提交)参考答案:D问题解析:3. 自动控制系统中测量被控量并进行信号转换,再反馈到输入端的元件是()。
A •比较元件B •校正元件C •测量反馈元件D •执行元件答题: A. B. * C. D.(已提交)参考答案:C问题解析:4. 火炮自动瞄准系统的输入信号是任意函数,这就要求被控量高精度地跟随给定值变化,这种控制系统叫()。
A. 恒值调节系统B.离散系统C.随动控制系统D.数字控制系统答题:匚]A. B. * C.「I ID.(已提交)参考答案:C问题解析:5. 随动系统对()要求较高。
A. 快速性B.稳定性C.准确性D.振荡次数答题:f A. ' B. ' C. D.(已提交)参考答案:A问题解析:6. 衡量系统稳态精度的重要指标时()A •稳定性B •快速性C •准确性D •安全性答题:• A. B. C. D.(已提交)参考答案:C问题解析:7. 自动控制系统的主要特征是()。
A •在结构上具有负反馈通路,以求得偏差信号B .由偏差产生控制作用以便纠正偏差C •系统开环D .控制的目的是减少或消除偏差答题:# A. * B. C. * D.(已提交)参考答案:ABD问题解析:8. 自动控制系统按照不同的分类原则有不同的分类结果,下列系统哪些是按照同一原则进行分类的()。
A •连续系统B •程序控制系统C •恒值控制系统D •随动系统答题: A.庁I B. C.二I D.(已提交)参考答案:BCD问题解析:9. 自动控制系统按描述元件的动态方程分()。
华南理工大学2014年攻读硕士学位研究生入学考试模拟试题考试科目:自动控制综合报考专业:控制理论与控制工程,模式识别,控制工程,系统工程等。
试题编号:8331、本试题的答案必须写在规定的答题纸上,写在试卷上将不给分。
2、所有答案必须用蓝、黑钢笔或圆珠笔写在答题纸上,用红笔者不给分3、考试结束后,将答题纸和试卷一并装入试卷袋内。
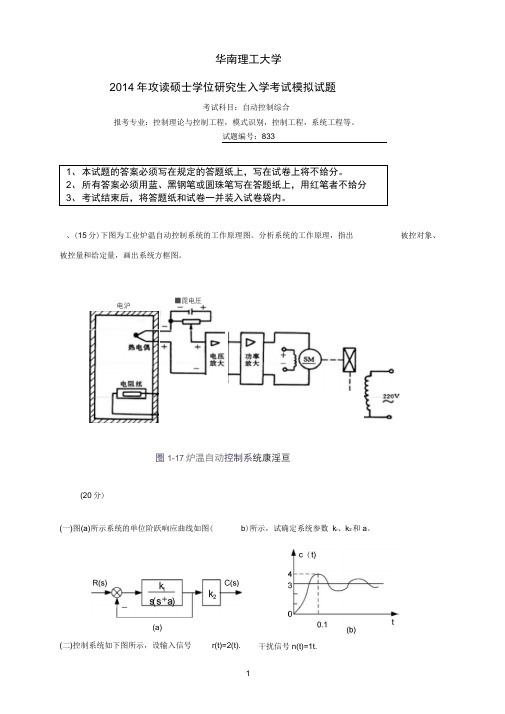
、(15分)下图为工业炉温自动控制系统的工作原理图。
分析系统的工作原理,指出被控量和给定量,画出系统方框图。
圏1-17炉温自动控制系统康淫亘(20分)(一)图(a)所示系统的单位阶跃响应曲线如图( b)所示,试确定系统参数k i、k2和a。
(二)控制系统如下图所示,设输入信号r(t)=2(t).(a)被控对象、干扰信号n(t)=1t.电沪■毘电圧L 试确定系统的稳态误差务。
2.若要求系统的稳态误差纭童0」,试提出达到这一稳态性能指标的方法•三、(20分)控制系统结构如图所示,试绘制以 T 为参变量的根轨迹(E =0T ),并讨论I 逐渐 增大对系统动态过程的影响。
(3)、设控制系统如图4,要求校正后系统在输入信号是单位斜坡时的稳态误差不大于 角裕度不小于40°,幅值裕度不小于10 dB ,问该用那种校正装置校正?为什么?五、(18分)一非线性系统如下,输入单位阶跃信号(1) 在e-e 平面上大致画出相轨迹; (2) 判断系统的稳定性;(3)确定系统的稳态误差 e (::)。
四、(22分)(1)已知系统开环传递函数为 特稳定判据判断系统稳定性。
G(s)H(s)」(1— S ),k, ,T 均大于0,试用奈奎斯s(Ts +1)(2)已知最小相位系统的对数幅频特性如图3所示。
试求系统的开环传递函数。
R(s)KC(s)------- 1厂I V s(s+1)0.05,相 (16 分)* L( 3 ) dB-4020-2033 2101 3 1-10-40图3图4六、(15分)系统结构如下图所示, T=1s,a=1,试分析系统的稳定性,临界放大系数, K=1时系统的单位脉冲响应,K=1时单位阶跃输入时系统的稳态误差。

华南理工大学《自动控制原理》-历年真题填空问答参考答案2005年:一.填空1.控制系统从信号传送的特点或结构形式来看,可分为开环控制和闭环控制系统。
2.闭环控制系统,对主反馈而言,只有按负反馈原理组成的闭环控制系统才能实现自动控制。
因为这种系统能使偏差越来越小,甚至被消除。
3.工程上把控制性能的要求归纳为稳定性快速性和准确性三个方面。
4.利用Routh判据判断闭环系统稳定的充分必要条件是系统特征方程的全部系数(不缺项)均为正数,且Routh 表第一列元素都是正数。
5.二阶系统,其阻尼系数等于1时,单位阶跃响应是单调衰减过程,若阻尼系数大于零小于1,单位阶跃响应是衰减的振荡过程。
6.减小或消除控制系统的稳态误差,通常可以通过增大系统的开环放大系数或增加前向通道积分环节个数来达到,但往往又会使系统的动态性能变差,甚至导致系统不稳定。
二.简答题1.线性定常系统的传递函数定义是什么?传递函数与什么有关?答:线性定常系统,在初始条件为0的条件下,输出量的拉氏变换与输入量的拉氏变换之比,称为该系统的传递函数。
传递函数表达式中各系数的值完全取决于系统的结构和参数。
2.自动控制系统稳定的定义是什么?系统稳定性与闭环极点有何关系?答:假设系统处于某一起始的平衡状态,在外作用的影响下它离开了平衡状态,当外作用消失后,经过足够长的时间它能回复到原来的平衡状态,则称该系统是稳定的。
系统稳定的充要条件是:系统的闭环极点均为负实数或(和)具有负实部的共轭复数,即系统所有闭环极点均位于复平面的虚轴左半部。
2006年一.填空1.在闭环控制系统中,通过检测元件将输出量转变成与给定信号进行比较的信号,这个信号称为反馈信号。
2.若前向通道的传递函数为()G s,反馈通道的传递函数为()H s,则开环传递函数为()()G s H s。
3.齿轮副中,以主动轮角速度ω为输入,以被动轮转角θ为输出,则这个装置为积分环节。
4.若环节的传递函数为Ks ,则其对数幅频特性()Lω在零分贝点处的频率数值为K 。
本科学校聘用宣传员录取专业吕建宏机械电子工程郑兵控制理论与控制工程曹学阳材料工程(专业学位)张倩食品工程(专业学位)赖林辉生物工程(专业学位)张顺材料工程(专业学位)姜林峰化学工程黄妍技术经济及管理黄力藜建筑学(专业学位)危博材料学李政电工理论与新技术东北农业大学李小月食品工程(专业学位)哈尔滨工程大学哈尔滨工业大学东北大学东北林业大学华南理工大学2015年硕士研究生各位考生: 欢迎您选报华南理工大学!为更好的为广大有志于报考我校研究生选聘了下列同学(均为2014年应届毕业本科生)参加我们的招生咨询工作。
各高校2015年应届本科毕业请考生留意本网发布的信息。
更多信息也请关注华南理工大学研招官方微博:新浪宿舍地址QQ 电子邮箱三公寓539室852105104852105104@ 学生第三公寓334616765614616765614@五公寓609731144420hitcaoxueyang@ 5公寓6211035962134hitqian@ 十公寓324室605088326605088326@ 第二宿舍(西)288149705474149705474@二舍西2981527056339linfengjiang6@ 9舍G区20515776480571577648057@四舍213315107986hllkkx1991@ 学生公寓12A218973599108973599108@ 2号公寓30910621093971062109397@ 南八11828042686742804268674@研究生招生驻各高校咨询人员名单研究生的考生服务,做好2015年研究生招生咨询工作,我校在2014年录取的硕士研究生新生中,询工作。
各高校2015年应届本科毕业且有考研或保研志向的考生可以向这些同学咨询。
有关我校考研咨询官方微博:新浪/scutyzb。
,考试作弊将带来严重后果!华南理工大学期中考试《 自动控制原理 》试卷B1. 考前请将密封线内各项信息填写清楚; 所有答案请直接答在试卷上(或答题纸上); .考试形式:闭卷;(15分) 液位控制系统如图1所示。
其中液体容器为圆柱体,横截面面积A 。
图中h 液位高度,in ω和out ω分别为液体流入和流出的速率。
图11) 根据物质守恒原理求出in ω,out ω和h 变化率之间的关系; 2) 已知液体流出速率out ω与压力p 满足关系out ω=p gh =(g 为重力系数)。
根据上述关系和1)中的结果求出in ω和h 之间的满足微分方程; 3) 如要求液位的工作点为0h ,试确定in ω在工作点的值和该系统在工作点附近的线性化常微分方程。
outω二、(15分)某控制系统如图2所示。
图21) 画出该系统根轨迹的大致图形;2) 根据所得根轨迹说明当K 从0→+∞变化时,闭环系统的阻尼系数是否可能接近零?3) 试分析当K 很大时,K 增大对闭环系统的动态特性有什么影响?为什么?三、(15分)控制系统结构图如图3所示,图31) 当K=1时,求出该系统跟踪单位斜坡信号的稳态误差;2) 若要求将系统跟踪单位斜坡信号的稳态误差减小10倍,应该选取怎样的K ; 3)利用伯特图说明在上述两种情况下,系统的相角稳定裕量将发生什么变化;并由此给出你对该问题的结论。
四、(20分)已知对一阶惯性环节 ()1kG s Ts =+。
当输入正弦信号sin10t ,则它的y稳态输出为若在该环节输入输出端加上一个单位反馈,问所得闭环系统在跟踪单位阶跃信号时,其稳态跟踪误差为多少?五、(20分)闭环系统的开环传递函数的极点均在复平面的左半平面,相应的对数幅频特性如图4所示, 1)求出该传递函数的表达式; 2)求出相角稳定裕量;3)若要求保证系统的稳定裕量基本不变同时系统跟踪斜坡信号的稳态精度提高10倍,应选择怎样的校正装置?说明基本的设计思想和大致的参数选择范围。
,考试作弊将带来严重后果!华南理工大学期中考试《 自动控制原理 》试卷A1. 考前请将密封线内各项信息填写清楚; 所有答案请直接答在试卷上(或答题纸上); .考试形式:闭卷;4. 本试卷共 6大题,满分100分, 考试时间150分钟。
题 号 一 二 三四五六总分得 分 评卷人(15分)位置控制系统的原理图如图1所示图1r 为外部给定信号;功率放大器的输入2u 与电动机角速度ω的拉氏变换之比:1k Ts +; 电动机角速度ω与机械装置在t 时刻的位移()y t 满足下面关系()(0)()ty t y d ωττ=+⎰; 位置测量元件的输出p u 与机械装置的位移y 满足下面关系p p k y =;测速电机的输出s u 与电动机角速度ω的关系如图2所示(图中直线斜率s k ),测速电机输出端电位器的触点在电位器的中心点。
图21) 求出该系统各个环节的传递函数; 2) 画出该系统的方框图;3) 若2110R R =,43R R =,1C =,0.2s k =和0.1p k =。
求出系统输入r 到系统输出y的传递函数。
二、(15分)某控制系统如图3所示。
:1) 根据k 对闭环系统极点的影响说明k 增大对系统稳定性的影响; 2) 试分析k 增大对系统单位斜坡响应稳态误差ess 的影响; 3)利用伯特图说明1)和2)中的结论。
图3三、(15分)控制系统结构图如图4所示, 1) 试绘k 从0→∞时根轨迹的近似图形; 2) k 为何值时系统的阻尼系数ξ小于0.707;3) 当0.25k >时, k 增大会不会影响闭环系统的超调量? 会不会影响过度过程时间? 为什么?ω图4四、 (20分)反馈系统如图5所示,r 是外部命令,n 是干扰信号,y 是系统输出。
1) 当外部命令0r =;干扰信号sin10n t =时,当时间t 趋向无穷大时,系统输出y 是否会趋向零?2) 在1)中的条件下,要求在稳态时系统输出y 在[-0.01, 0.01]之中,应该选取什么k ?说明理由。