基于液压伺服控制系统的离心机动平衡调节系统仿真
- 格式:pdf
- 大小:182.03 KB
- 文档页数:3

基于ALQR方法的液压伺服控制系统仿真分析摘要:针对液压伺服系统的外干扰力,本文根据结构不变性原理设计一个前馈干扰补偿器。
采用增广线性二次型调节器(ALQR)设计一个控制律,以使补偿后的液压伺服系统能够又快又好地跟随期望信号。
最后,利用仿真结果验证此方法具有良好的性能。
关键词:结构不变性;增广线性二次型调节器;最优控制;MATLAB仿真11.引言典型的液压伺服控制系统液压伺服系统主要是由伺服放大器、电液伺服阀、液压缸、位移传感器和压力传感器组成,在工程应用中多采用PID方法进行调节控制。
随着现代控制理论的不断发展,针对液压伺服控制系统涌现出了许多控制策略。
本论文首先采用结构不变性原理[1]对液压缸设计一个前馈干扰补偿器,以抵消掉外干扰力对输出的影响,然后拟采用增广LQR控制方法补偿后的液压伺服系统进行仿真。
图1 液压伺服系统组成结构示意图液压伺服系统组成结构示意图如图1所示。
考虑工程应用情况[2],简化之后的液压缸的活塞位移对阀芯位移及外干扰力的传递函数如下式(1):(1)2.前馈干扰补偿器设计电液伺服系统的外干扰通常作用在负载上,而且量值大、变化快,因而难于消除。
消除负载对系统的影响目前尚无行之有效的方法,为了消除外干扰对系统的影响,可采用结构不变性原理设计一个前馈干扰补偿器[1]对其影响进行补偿。
液压伺服系统补偿后的传递函数框图如图2所示:图2 液压伺服系统补偿后组成框图根据结构不变性原理,可推导出前馈干扰补偿器的传递函数如下式(2):(2)补偿后的液压伺服控制系统消除了外干扰力的影响。
针对补偿后的控制对象可利用增广LQR方法设计一种控制器,此时控制器的综合控制对象的传递函数如下式(3):(3)3.增广LQR控制器设计采用线性二次型最优控制方法(LQR)设计一种状态反馈控制律,其任务是当系统状态偏离平衡状态时,在不消耗过多能量的前提下,使得个整个系统状态变量接近平衡状态[3]。
控制对象的状态方程和输出方程如下式(4):(4)为了研究系统自身的特性,不妨假定单位阶跃信号为期望信号。
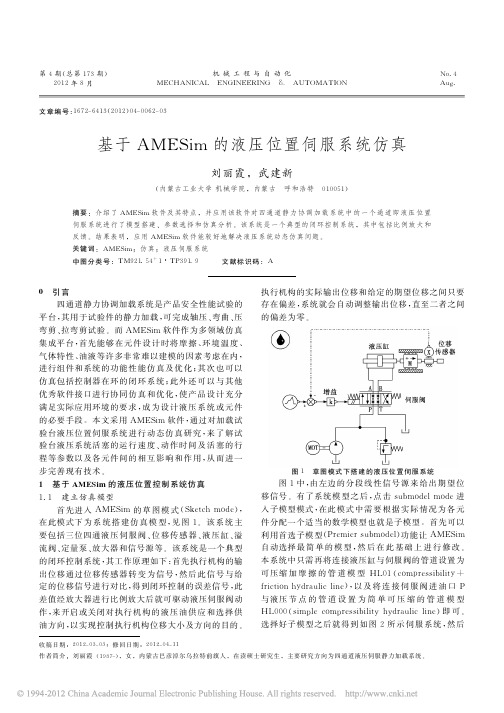
基于AMESim的电液伺服位置控制系统仿真研究作者:陈猛来源:《科学导报·科学工程与电力》2019年第18期【摘; 要】电液伺服位置控制系统具有输出功率大、动态响应快、响应精度高等优点而广泛用于现代工业中。
本文采用 AMESim仿真平台搭建其仿真模型,并基于此模型仿真了不同指令下系统的动态性能。
Abstract:Theelectro-hydraulic servo position control system is widely used in the modern industry,owing to its large power,quickly response and high accuracy.The simulation model based on the AMESim software is established in this paper.The dynamic characteristics of the simulation model under different command signal are obtained.【关键词】液压伺服;AMESim;动态特性Keywords:Hydraulic servo,AMESim,Dynamic characteristic1.前言在液压控制系统中的位置控制系统应用最为广泛。
其中电液伺服位置控制系统能充分发挥电子与液压两方面的优点,既具有功率大,又具有高精度和快速响应[1]。
AMESim是一多學科领域的复杂系统建模与仿真平台,用户可以在这个单一平台上建立复杂的多学科领域的系统模型,并在此基础上进行仿真计算和深入分析,也可以在这个平台上研究任何元件或系统的稳态和动态性能[2,3]。
AMESim已经成功应用于航空航天、车辆、船舶、工程机械等多学科领域,成为包括流体、机械、热分析、电气、电磁以及控制等复杂系统建模和仿真的优选平台[4]。

基于SIMULINK的液压伺服系统动态仿真
游张平;王卫锋
【期刊名称】《机床与液压》
【年(卷),期】2004(000)006
【摘要】本文提出了利用SIMULINK软件包对液压伺服系统进行动态仿真的方法.以阀控液压缸为例建立了液压伺服系统的动态模型,给出了该系统的仿真模型,详细介绍了如何利用SIMULINK对液压系统的动态特性进行仿真,同时较详细地讨论了影响液压伺服系统动态特性的主要因素.仿真结果表明,SIMULINK方法是对液压伺服系统的动态特性进行仿真的一条有效途径.
【总页数】3页(P47-49)
【作者】游张平;王卫锋
【作者单位】福建大学机械工程学院,福州,350002;广东冠粤路桥有限公司,广州,510630
【正文语种】中文
【中图分类】TH137.5
【相关文献】
1.基于SIMULINK的液压伺服系统动态仿真 [J], 金春花
2.基于Simulink的液压伺服系统动态仿真 [J], 李自光;游张平
3.基于Simulink的飞机平尾舵机伺服系统动态仿真 [J], 赵庭彬;王平军
4.基于Simulink的阀控液压缸系统动态仿真 [J], 吴玲
5.基于AMESim和Simulink的液压伺服系统动态仿真 [J], 万理想;丁保华;周洲;徐军
因版权原因,仅展示原文概要,查看原文内容请购买。


液压气动与密封/2006年第1期1引言液压系统的动态特性是衡量一套液压系统设计及调试水平的重要指标。
液压系统由若干液压元件组成,元件的动态性能相互影响、相互制约以及系统本身所包含的非线性,致使其动态性能非常复杂。
因此,液压系统的仿真受到越来越多的重视,液压仿真软件的精度和可操作性等都有极大的提升。
特别是近几年,国外液压仿真技术飞速发展,各款老牌的液压仿真软件纷纷推出新版本,如法国的AMESim、波音公司的Easy5、英国的Bathfp、瑞典的Hopsan、德国的DSHplus等。
文章选择IMAGINE公司的AMESim作为仿真软件环境,在介绍AMESim仿真软件的功能与特点的基础上,以典型的电液伺服控制系统为例,详细探讨了利用AMESim软件包进行液压系统建模与仿真方法,对基于DesignExploration模块和AMESim/matlab接口两种系统优化的方法、对电液伺服控制系统的PID参数进行了优化研究,并给出了仿真与优化的结果。
2AMESim仿真软件AMESim全称为AdvancedModelingEnvironmentforPerformingSimulationsofEngineeringSystems,是法国IMAGINE公司开发的高级工程系统仿真建模环境,为流体、液体、气体、机械、控制、电磁等工程系统提供一个较完善的综合仿真环境。
AMESim是一个多学科领域的建模仿真平台,在统一的平台上实现了多学科领域的系统工程的建模与仿真。
不同领域的模块之间直接的物理连接方式使AMESim成为多学科领域系统工程建模和仿真的标准环境。
AMESim具有丰富的模型库(18个模型库,1000多个模块),用户可以采用基本元素法,按照实际物理系统来构建自定义模块或仿真模型,而不需要去推导基于AMESim的电液伺服系统仿真与优化研究马长林,黄先祥,郝琳(第二炮兵工程学院202分队陕西西安710025)摘要:AMESim是法国IMAGINE公司开发的高级工程系统仿真建模环境,为机械、液压、控制等工程系统提供一个较完善的综合仿真环境。
基于EASY5的典型电液位置伺服系统建模及其仿真摘要:在气轮机电液伺服控制系统中伺服放大器的放大倍数直接影响到输出油液的压力和质量流量,还有活塞的位移等等。
若放大倍数过大,则系统的响应速度很快,但是稳定性太差;放大倍数过小,则响应速度又太慢,也不是我们所期望的。
如何选用一个适当的放大倍数是液压控制中的一个重要问题。
本文将采用最新的工程仿真软件EASY5对气轮机电液伺服系统进行建模并仿真,就以上问题进行一定意义上的探讨。
同时,也通过这个实例来阐述EASY5在各种系统尤其是液压控制系统的建模和仿真中的应用。
关键词:电液伺服系统;电液伺服阀;伺服放大器;传递函数;EASY5;建模;仿真;Modeling and Simulation of Typical Electric-hydraulic Servo System Based on EASY5Abstract:The discourse has done some research on modelling and simulation of typical electric-hydraulic servosystem based on EASY5 in order to analyze thestability of the system under an unpredictabledisorder external influence. And also the discourseaccounted for the access of the software EASY5 in themodelling and simulation of any other applied systemthrough this instance.Keywords: Electric-hydraulic Servo System; Electric-hydraulic Servo Valve; Servo Magnifier; Transfer Function;EASY5;Modeling;Simulation;0. 引言随着工业自动化水平的提高,许多液压系统要求油流的压力和质量流量能够连续地或按比例地跟随控制信号而变化,但对控制精度和动特性却要求不高。
基于AMESim的液压位置伺服系统动态特性仿真
江玲玲;张俊俊
【期刊名称】《机械工程与自动化》
【年(卷),期】2007(000)001
【摘要】AMESim是一套完备的面向工程设计的高级建模仿真软件.介绍了AMESim软件及其特点,建立了液压位置伺服系统的仿真模型,对其动态特性进行了仿真分析.结果表明,应用AMESim软件能较好地解决液压系统动态仿真问题.【总页数】4页(P35-37,40)
【作者】江玲玲;张俊俊
【作者单位】西南科技大学,四川,绵阳,621010;西南科技大学,四川,绵阳,621010【正文语种】中文
【中图分类】TM921.54+1;TP391.9
【相关文献】
1.基于AMEsim的智能铲运机液压制动系统动态特性仿真 [J], 姜勇
2.基于AMESim/Simulink的液压位置伺服系统仿真 [J], 麦云飞;程奇
3.基于AMESim的液压位置伺服系统仿真 [J], 刘丽霞;武建新
4.基于AMESim的液压位置伺服系统故障仿真 [J], 陈阳国;曾良才;吕敏建
5.基于AMESim的液压支架降柱动态特性建模仿真 [J], 刘晓莲;李坤;赵雄鹏
因版权原因,仅展示原文概要,查看原文内容请购买。
系统建模与仿真论文学院机械自动化学院专业机械电子工程学号201303703012指导老师唐秋华学生姓名段少军日期2014年8月基于Matlab的液压伺服系统动态特性仿真与稳定性分析摘要:本文提出了利用Matlab/Simulink 软件包对液压伺服系统进行动态仿真的方法,介绍了液压伺服摇摆台的结构原理,根据摇摆台的结构原理确定系统的主要传递函数建立摇摆台系统框图,最终得到液压伺服摇摆台系统的数学模型。
再根据摇摆台系统的数学模型,利用Simulink 对摇摆台系统的动态特性进行仿真。
根据输出结果,对摇摆台系统进行了分析研究,同时较详细地讨论了影响液压伺服系统稳定性的因素,调整相应摇摆台结构参数,再次对摇摆台系统进行模拟仿真,从而验证系统的正确性,最终达到了优化摇摆台系统的目的。
仿真结果表明,Simulink 方法是对液压伺服系统动态特性进行仿真研究的一条有效途径。
关键词: 液压伺服摇摆台动态性能稳定性仿真Matlab/Simulink随着液压系统逐渐趋于复杂和对液压系统仿真要求的不断提高, 传统的利用微分、差分方程建模进行仿真的方法已经不能满足需要,在实际工业生产过程中,当系统建立之前,如果能够建立一个虚拟仿真模型,通过仿真系统结构和参数来模拟实际系统进行分析研究,可以实现许多功能,如优化系统、再现系统故障、验证系统的正确性等。
Matlab 中动态仿真工具Simulink 是一个用来对动态系统进行建模、仿真和分析的软件包。
该软件包为用户提供了用方框进行建模的图形接口, 包括了众多线性和非线性等环节, 并可方便地扩展, 使得系统的构建容易, 适合于液压系统中普遍存在的非线性问题的求解。
它拥有强大的矩阵处理和绘图功能,还可通过编程手段实现对仿真过程和仿真结果的控制与处理。
与传统的仿真软件包用微分方程和差分方程建模相比, 具有更直观、方便、灵活的优点。
1 摇摆台的工作原理摇摆台的控制系统如图1所示。
要使台体运动某一角度,计算机首先确定角度给定值,并由测量系统(测角转换器、测角装置数字I/O)读取当前台体摆角实测值。