节点的测距与定位
- 格式:pdf
- 大小:424.89 KB
- 文档页数:3
WSN基于测距的定位方法解析无线传感器网络(WSN)是由大量分布在监测区域内的无线传感器节点组成的网络。
WSN在许多应用领域中都有重要的应用,例如环境监测、智能交通系统、军事监测等。
在这些应用中,节点的位置信息对数据的准确采集和处理是至关重要的。
因此,实现WSN节点的准确定位一直是研究的热点之一WSN节点的定位方法主要有两种:基于测距的定位和基于角度的定位。
基于测距的定位方法是通过测量节点之间的距离来确定节点的位置,其原理是利用节点之间的通信信号传输的时间、信号强度或到达时间差等信息来推算节点的位置。
测距定位方法可以分为两种基本类型:单跳测距和多跳测距。
单跳测距方法是通过直接测量相邻节点之间的距离来确定节点的位置。
其优点是简单、易实现,但缺点是节点之间的通信距离有限,无法实现节点之间的直接通信。
多跳测距方法则是通过多个节点之间的通信信号相互传递来实现节点的位置估计。
这种方法可以克服单跳测距方法的局限性,但需要更加复杂的数据处理和计算。
基于测距的定位方法有多种实现技术,包括超声波测距、无线信号传输时间、全球定位系统(GPS)协助等。
超声波测距是通过节点之间发送和接收超声波信号来测量节点之间的距离,其原理是根据声波在空气中传播的速度和时间差来计算距离。
无线信号传输时间是通过测量信号传输的时间差来确定节点之间的距离,其原理是利用信号的传输速度和时间来计算距离。
GPS协助是利用卫星信号来辅助节点的定位,通过接收卫星信号来确定节点的位置,结合其他传感器节点的数据进行位置校正和修正。
在实际应用中,基于测距的定位方法通常结合多种技术和算法进行节点位置的估计。
这些算法主要包括最小二乘定位、加权最小二乘估计、多边形法等。
最小二乘定位是一种通过最小化误差平方和来估计节点位置的方法,加权最小二乘估计则是在最小二乘定位的基础上引入权重因子来考虑节点之间的传感器误差,多边形法则是通过多个节点组成多边形的几何关系来确定节点位置。
光纤传感网络中的节点定位算法随着网络技术的不断进步和广泛应用,光纤传感网络已成为一种重要的物联网技术手段,其在人工智能、工业自动化、智慧城市等领域都有着广泛的应用。
然而,光纤传感网络中的节点定位问题一直是个难题。
节点定位算法的准确性、实时性、成本和可扩展性等因素决定了其实际应用的效果。
如何高效准确地定位节点,成为了当前光纤传感网络的热门研究课题。
本文将介绍一些常见的光纤传感网络节点定位算法,以及其特点和应用情况。
一、TOA算法TOA(Time of Arrival)算法是一种基于时间的节点定位算法,其核心思想是根据节点发送和接收的信号之间的时间差来确定节点的位置。
该算法需要引入一个中央控制器,通过在网络中的节点之间发送包含时间戳的数据包,利用节点同步技术和时间戳信息进行节点定位。
TOA算法的定位准确度高,可以达到亚毫秒级别,但是算法对于链路时延、同步误差等因素都非常敏感,对于普通的光纤传感网络应用来说,成本较高。
二、RSSI算法RSSI(Received Signal Strength Indication)算法是一种基于信号强度的节点定位算法。
该算法通过收集节点发送信号的信号强度,然后进行测距和定位。
该算法需要大量的校准,因为信号强度的衰减受到一系列因素的影响,包括信号传播的路径、接收器的增益和环境干扰等。
RSSI算法需要网络节点足够密集,同时需要采用具有较好性能的接收器进行测距,这对于光纤传感网络的实际应用来说存在一定的局限性。
三、TDOA算法TDOA(Time Difference Of Arrival)算法是一种基于时间差的节点定位算法,它使用无线节点和基站之间信号到达时间的差异来确定节点的准确位置。
TDOA与TOA算法类似,也需要一个中央控制器,中央控制器会在网络中的基站上同步发出信号,在节点接收到信号后,根据到达时间差测量可能的位置。
与TOA算法相比,TDOA算法不需要精确的时间同步,能够减少同步误差的影响,精度和稳定性也更高,但是需要更多的计算和计算资源,成本相对较高。
定位技术的方法根据具体的定位机制,可以将现有的定位方法分为两类:基于测距的(Range-based)方法和不基于测距的(Range-free)方法[6]。
基于测距的定位机制需要测量未知节点与锚节点之间的距离或者角度信息,然后使用三边测量法、三角测量法或最大似然估计法计算未知节点的位置。
而不基于测距的定位机制无需距离或角度信息,或者不用直接测量这些信息,仅根据网络的连通性等信息实现节点的定位。
常用的定位方法是基于测距定位方法,在这种定位机制中需要先得到两个节点之间的距离或者角度信息,通常采用以下方法。
(1)信号强度测距法(2)到达时间及时间差测距法(3)时间差定位法(4)到达角定位法信号强度测距法(RSSI)已知发射功率,在接收节点测量接收功率,计算传播损耗,使用理论或经验的信号传播模型将传播损耗转化为距离。
例如,在自由空间中,距发射机d 处的天线接收到的信号强度由下面的公式给出:Pr(d )=PtGtGrλ2/(4π)2d 2L其中,Pt为发射机功率;Pr(d )是在距离d 处的接收功率;Gt、Gr分别是发射天线和接收天线的增益;d 是距离,单位为米;L为与传播无关的系统损耗因子;λ是波长,单位为米。
由公式可知,在自由空间中,接收机功率随发射机与接收机距离的平方衰减。
这样,通过测量接收信号的强度,再利用式(1)就能计算出收发节点间的大概距离。
得到锚节点与未知节点之间的距离信息后,采用三边测量法或最大似然估计法可计算出未知节点的位置。
三边计算的理论依据是,在三维空间中,知道了一个未知节点到三个以上锚节点的距离,就可以确定该点的坐标。
三边测量法在二维平面上用几何图形表示出来的意义是:当得到未知节点到一个锚节点的距离时,就可以确定此未知节点在以此锚节点为圆心、以距离为半径的圆上;得到未知节点到3个锚节点的距离时,3个圆的交点就是未知节点的位置。
然而,公式只是电磁波在理想的自由空间中传播的数学模型,实际应用中的情况要复杂的多,尤其是在分布密集的无线传感器网络中。

基于RSSI的无线传感器网络节点定位颜嘉俊;雷勇【期刊名称】《计算机仿真》【年(卷),期】2012(29)7【摘要】研究基于Zigbee技术的无线传感器网络中未知节点的定位问题.针对传统的Two-phase positioning循环求精定位算法复杂,且在RSSI节点测距阶段存在某些点的测距误差较大,导致定位精度大大下降.为了解决测距误差大的节点对定位精度的影响,提高定位精度,首先采用RSSI测距法测出未知节点和锚节点距离,用最小二乘法粗略定位,其次通过距离关系算出每个粗略定位点的权值,引入权值阀,舍去在权值阀外的点,最后在求精阶段采用三角形加权重心算法.此方法可以最大限度的减少测量误差大的节点对定位精度的影响.经实验证明,改进算法也存在一定的误差,但比传统的算法更加精确,提高了定位精度.%Study unknown nodes location in wireless sensor network which is the bass of Zigbee technology. To solve the problem that the traditional two-phase positioning algorithm is complexed, and some distance measurement error exists during RSSI stage, resulting in positioning accuracy dramatically reduced, the paper firstly used RSSI ranging method to measure distance between unknown nodes and anchor nodes, and also least square was used in the rough location stage. Then the weight of each rough location node was worked out by distance relationship, the valve of node weight was introduced, and the node was discarded, whose value of weight was outside the minimum weight. Finally, the weighted triangle center of gravity algorithm was usedin the refinement stage. This method minimizes the influence brought by the nodes with large measurement error. Simulation results show that the errors exist by using this algorithm, but it is more accurate than traditional algorithm, and location precision can be improved.【总页数】4页(P151-154)【作者】颜嘉俊;雷勇【作者单位】四川大学电气信息学院,四川成都610065;四川大学电气信息学院,四川成都610065【正文语种】中文【中图分类】TP393【相关文献】1.基于RSSI-锚圆算法的无线传感器网络节点自定位研究 [J], 丁承君;柳瑛;段萍;付胜梁2.基于RSSI的无线传感器网络节点定位算法 [J], 章磊;黄光明3.基于改进的RSSI无线传感器网络节点定位算法研究 [J], 苟胜难4.基于RSSI的无线传感器网络节点定位算法研究 [J], 付墨轩;廖强;;5.基于RSSI的无线传感器网络节点定位技术研究 [J], 周立君;刘宇因版权原因,仅展示原文概要,查看原文内容请购买。
基于RSSI测距和距离几何约束的节点定位算法无线传感器网络是一种全新的信息获取和处理方式,是由部署在感兴趣区域的大量低成本、低功耗的微型无线传感器网络节点组成。
作为无线传感器网络的基本组成部分,节点的位置信息对整个无线传感器网络是非常重要的。
节点收集感知数据时,如果不知道其感知对象位置,所感知的信息往往是毫无意义的[1,2]。
目前定位算法主要分两大类,基于测距算法(range-based)和无需测距算法(range-free)。
基于测距算法通过测量节点间的距离和角度信息,使用三边测量、三角测量或最大似然估计等定位算法。
常用的测距技术有RSSI(接收信号的强度指示)、TOA、TDOA 和AOA 等。
无需测距定位算法则不需要距离和角度信息,算法根据网络连通性等信息来实现节点定位。
基于测距的定位算法由于实际测量节点间的距离或角度,通常定位精度较高,比较各种基于距离的测距方法,基于RSSI 的定位无需额外硬件,而无线通信芯片本身具有计算收发信号强度的功能,定位不需要增加额外的硬件,不会增加节点的硬件成本和尺寸,所以基于RSSI 的测距是无线传感器网络定位比较常用的方法。
在实际的应用中由于反射、多径传播、非视距、天线增益等问题都会对RSSI的测距产生误差,从而引起较大的定位误差。
本文利用二维空间的Cayley - Menger 行列式[2,3]提供的几何约束对RSSI 的测距误差进行优化修正,结合三角形质心计算,提出了一种基于RSSI 测距和距离几何约束结合三角形质心定位算法(RDGC-TCL)。
仿真表明,该算法与基于RSSI 和三角形质心定位算法(R_TCL)相比,提高了定位精度。
RDGC-TCL 算法RSSI 测距。
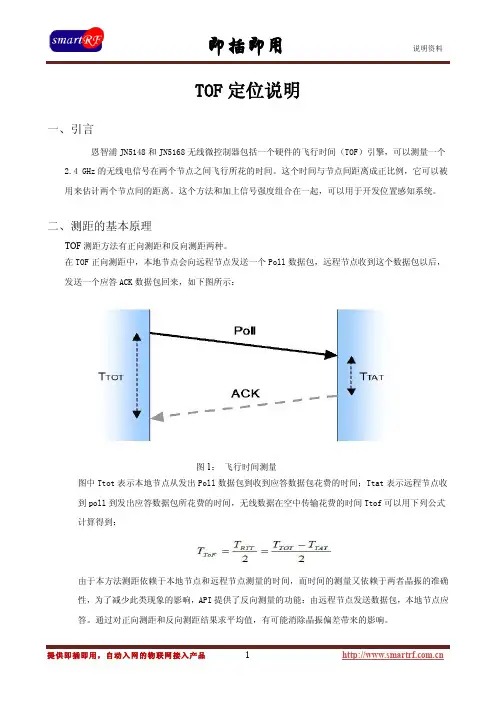
TOF定位说明一、引言恩智浦JN5148和JN5168无线微控制器包括一个硬件的飞行时间(TOF)引擎,可以测量一个2.4 GHz的无线电信号在两个节点之间飞行所花的时间。
这个时间与节点间距离成正比例,它可以被用来估计两个节点间的距离。
这个方法和加上信号强度组合在一起,可以用于开发位置感知系统。
二、测距的基本原理TOF测距方法有正向测距和反向测距两种。
在TOF正向测距中,本地节点会向远程节点发送一个Poll数据包,远程节点收到这个数据包以后,发送一个应答ACK数据包回来,如下图所示:图1:飞行时间测量图中Ttot表示本地节点从发出Poll数据包到收到应答数据包花费的时间;Ttat表示远程节点收到poll到发出应答数据包所花费的时间,无线数据在空中传输花费的时间Ttof可以用下列公式计算得到:由于本方法测距依赖于本地节点和远程节点测量的时间,而时间的测量又依赖于两者晶振的准确性,为了减少此类现象的影响,API提供了反向测量的功能:由远程节点发送数据包,本地节点应答。
通过对正向测距和反向测距结果求平均值,有可能消除晶振偏差带来的影响。
三、实际测距的方法飞行时间的计算依赖于发送和测试时间数据的两个节点间的协作。
如下图所示:✧实际测试中,由本地节点向远程节点发送Prime命令初始化测试,然后重复多次上文描述的测试,最后本地节点向远程节点请求包含测距结果的数据包,远程节点收到请求后将测试结果数据发送给本地节点。
反向测距中Poll和ACK命令收发方向相反;✧实际测试中,正向测距一次46ms左右;反向测试一次时间49ms左右。
由于正向测试和反向测试都是测量了10次,所以单次正向测距平均4.6ms左右,单次反向测距平均4.9ms左右。
四、TOF API简要说明TOF API提供了功能配置和使用时间的JN5148或JN5168装置。
完整的示例代码可以在JN-AN-1143 飞行时间测距演示中找到。
初始化:在TOF硬件和API使用前,必须调用vAppApiTofInit()来初始化;校准:s32AppApiTofGetCalloffset() 和vAppApiTofSetCalloffset();测量:bAppApiGetTof(),最多255次TOF测量;五、TOF测量结果的处理:◆TOF测量数据处理2.4G信号在空中传播速度为光速(299,792,458 m/s)。
WSN基于测距的定位方法WSN(Wireless Sensor Network,无线传感器网络)是指由多个分布在空间中的传感器节点组成的网络系统,这些节点可以通过无线通信协作,共同完成监测、数据采集和信息传输等任务。
在WSN中,节点之间的相对位置信息是至关重要的,因为它们可以帮助节点协同工作,提高网络的性能和效率。
因此,实现节点之间的准确定位是WSN中的一个重要问题。
基于测距的定位方法是一种常用的定位方法,其原理是通过节点之间的距离测量来确定节点的位置。
下面将详细介绍WSN基于测距的定位方法。
1.测距技术在WSN中常用的测距技术包括信号强度测量、时间差测量和角度测量等方法。
信号强度测量是通过节点之间的信号强度来估计它们之间的距离,这种方法简单易实现,但受到传播环境的影响较大,定位精度较低。
时间差测量是通过计算信号在节点之间传播的时间差来确定它们之间的距离,这种方法精度较高,但需要节点之间高度同步。
角度测量是通过测量信号到达节点的角度来确定节点之间的距离,这种方法对节点之间的相对位置有一定要求,但精度较高。
基于测距的定位方法一般分为两种:基于距离的定位和基于三角测量的定位。
基于距离的定位方法是通过测量节点之间的距离来确定它们的位置。
这种方法可以使用信号强度、时间差或者角度等测距技术来实现。
其中,最常见的是信号强度测量方法。
该方法利用节点之间的信号传输强度随距离的衰减关系,来估计节点之间的距离。
通过收集大量的距离测量数据,并利用三边测距等方法进行处理,可以对节点的位置进行准确估计。
但是由于信号传输受到环境的影响较大,导致测距误差较大,因此通常需要进行校正和优化。
基于三角测量的定位方法是通过测量节点与周围已知位置的节点之间的角度和距离来确定节点的位置。
这种方法通常会使用三角形或多边形的几何关系进行计算,从而求解节点的位置坐标。
该方法对节点之间的位置关系有一定的要求,需要确保至少有三个节点的位置已知,并且节点之间不能共线。
无线传感器网络的距离测量与相对位置估计方法无线传感器网络(Wireless Sensor Networks,简称WSN)是由许多分布在广泛区域的自主传感器节点组成的网络。
WSN被广泛应用于环境监测、智能交通、医疗健康等领域,因其低成本、易部署的特性备受青睐。
在无线传感器网络中,节点之间的距离测量和相对位置估计对于节点定位、网络拓扑构建和路由协议等方面起着关键作用。
本文将介绍几种常见的无线传感器网络的距离测量和相对位置估计方法。
一、RSSI(Received Signal Strength Indicator)方法RSSI方法通过信号强度的衰减来测量传感器节点之间的距离。
节点之间的距离与接收到的信号强度成反比,在输入信号功率已知的情况下,可以通过比较接收信号的强度来估计节点之间的距离。
然而,RSSI方法容易受到多路径效应和信号衰减的影响,导致测量误差较大。
此外,环境中的干扰和信号传输质量的不稳定性也会影响距离测量的准确性。
二、TOA(Time of Arrival)方法TOA方法通过计算信号从发送到接收所需的时间来测量节点之间的距离。
在这种方法中,节点需要具备时间同步功能,以保证时间的一致性。
TOA方法的优点是测量精度高、测距范围广。
然而,由于测距所需的时间延迟较大,因此对网络的同步要求较高,且节点之间的相对位置必须保持固定,否则测距结果会受到影响。
三、TDOA(Time Difference of Arrival)方法TDOA方法通过计算信号到达不同节点之间的时间差来测量节点之间的距离。
与TOA方法不同,TDOA方法不需要节点之间的时间同步。
TDOA方法的优点是可以同时测量多对节点之间的距离,且对节点的时钟同步要求较低。
然而,这种方法需要节点具备高精度的时钟,并且需要大量的计算资源。
此外,在多径传播和干扰的影响下,测距误差会增大。
四、AOA(Angle of Arrival)方法AOA方法通过计算信号到达不同节点之间的入射角度来估计节点之间的距离。
无线传感网络中的位置定位与定位误差分析无线传感网络是由大量的无线传感器节点组成的网络,能够实时收集环境中的各种物理和化学信息,并将其传送到基站进行处理和分析。
其中一个重要的问题是位置定位,即确定无线传感器节点在空间中的准确位置。
位置定位在许多应用中都起着关键作用,例如室内导航、区域监测和环境感知等。
位置定位主要有两种方法:一种是基于物理测量的方法,另一种是基于信号强度的方法。
物理测量方法基于传感器节点测量目标地理信息的物理量,如距离、方位角和俯仰角等。
这种方法通常需要额外的硬件支持,如全球定位系统(GPS)和惯性测量单元(IMU)。
然而,由于这些硬件设备有限的精度和成本,物理测量方法的适用范围受到了限制。
相比之下,基于信号强度的方法通常只需要传感器节点自身的硬件设备,如射频模块和天线。
该方法通过测量接收到的信号强度指示器(RSSI)或到达时间差(TDOA)等参数来实现位置定位。
这种方法不需要额外的硬件支持,成本较低。
但是,由于信号强度在信号传播过程中受到多径传播和信号衰减等因素的影响,导致位置定位的精度较低。
无线传感网络中的位置定位误差是指估计位置与真实位置之间的差距。
定位误差受多种因素的影响,包括信号传播特性、传感器节点之间的距离、信号噪声和干扰等。
为了减小定位误差,研究者们提出了许多改进的方法。
首先,通过改善传感器节点之间的距离测量精度可以减小定位误差。
在物理测量方法中,使用高精度的测距设备可以提高位置定位的准确性。
在基于信号强度的方法中,可以使用多个传感器节点进行测距,利用多重路径的测量结果来提高定位精度。
其次,考虑信号传播特性和信号衰减模型也是减小定位误差的关键。
例如,在室内环境中,墙壁和障碍物对信号传播产生了阻碍和衰减效应。
研究者们通过引入信号传播模型,并利用机器学习算法对传感器节点的测量结果进行建模和估计,以减小位置定位的误差。
此外,传感器节点的部署和分布也会影响定位误差。
分布不均匀的传感器节点会导致定位误差的不均匀分布。
Lora节点的测距与定位精度测试方法引言无线通信技术的发展,为智能物联网的建设提供了重要的基础。
其中,Lora (Long Range)技术作为一种低功耗、长距离传输的无线通信技术,被广泛应用于物联网领域,尤其是物联网设备的测距和定位功能。
本文将介绍Lora节点的测距与定位精度测试方法,并探讨其在现实应用中的意义。
一、Lora技术简介Lora技术是一种长距离、低功耗的无线通信技术,其通信距离可达数公里。
它基于扩频技术,通过将低速数据传输转化为高速扩频信号,实现了在长距离、大面积的无线通信。
Lora节点是指安装了Lora通信模块的设备,通过与其他Lora节点通信,实现信息的传输和共享。
在物联网应用中,Lora节点可以用于监测、控制、定位等多种功能。
二、测距与定位精度的重要性在物联网应用中,测距与定位功能对于许多应用场景至关重要。
例如,智能城市的交通监控系统,需要准确获取车辆的位置信息,以便实时监控交通状况。
再如,工业自动化中的物料管理,需要准确获取物料的位置和距离,以提高生产效率。
因此,对于Lora节点的测距与定位精度进行测试,对于应用的可靠性和安全性至关重要。
三、Lora节点测距测试方法1. 距离衰减测试距离衰减测试是通过在不同距离下进行通信测试,来评估Lora节点的信号传输距离和信号衰减情况的方法。
具体步骤如下:(1)选择一个开放的室外测试场地,确保没有遮挡物和干扰源。
(2)在测试场地中设置两个Lora节点,一个作为发送端,一个作为接收端。
(3)在不同距离下进行测试,例如分别将接收端距离发送端设置为100米、200米、300米等。
(4)在每个距离下,发送端向接收端发送数据,并记录是否成功传输。
测试结果可以通过观察每个距离下的传输成功率来评估Lora节点的传输距离和衰减情况。
2. 多径传播测试多径传播是指信号在传输过程中,由于反射、折射等原因,到达接收端的路径不止一条。
多径传播会导致信号强度有时增强、有时减弱,从而影响到信号的传输质量和距离。
无线传感器网络的定位与轨迹跟踪方法无线传感器网络(Wireless Sensor Networks, WSN)是由大量分布式的传感器节点组成的网络系统,这些节点能够自动感知环境中的信息,并进行无线通信与数据处理。
在无线传感器网络中,定位与轨迹跟踪是一项关键任务,它可以用于诸多应用领域,如环境监测、智能交通、无线通信等。
在无线传感器网络中,节点的位置信息对于很多应用是至关重要的。
准确的定位可以帮助用户了解物体或个体在空间中的位置分布,进而进行进一步的数据分析和决策。
同时,轨迹跟踪可以实时记录物体或个体的运动轨迹,从而为物体的运动规律建模和行为分析提供基础。
目前,研究者们提出了多种无线传感器网络的定位与轨迹跟踪方法,下面将就几种常见方法进行介绍。
一、基于测距的定位方法基于测距的定位方法是通过测量传感器节点之间的距离或相对位置来实现定位。
这种方法通常需要节点间相互通信,或者引入距离测量设备,例如全球定位系统(GPS)。
一种常见的基于测距的定位方法是距离向量法(Distance Vector,DV)和多边形法(Polygon)。
距离向量法根据节点之间的距离信息构建网络拓扑,利用距离信息进行定位。
而多边形法则根据节点间的多边形约束关系进行定位,通过多边形内角和边长关系计算位置。
二、基于信号强度的定位方法基于信号强度的定位方法是通过测量传感器节点接收到的信号强度来确定节点的位置。
这种方法不需要节点间通信,只需利用节点接收到的信号强度与距离之间的关系进行定位。
常用的基于信号强度的定位方法有指纹定位法(Fingerprint),它通过事先收集节点位置与信号强度的对应关系建立指纹数据库,再通过匹配节点接收到的信号强度和已知指纹数据库进行定位。
三、基于角度的定位方法基于角度的定位方法是通过测量传感器节点之间的角度信息来实现定位。
这种方法一般需要节点具备方向感知能力,例如使用天线阵列进行角度估计。
一种常见的基于角度的定位方法是超宽带(UWB)定位方法。
三边测距定位算法
三边测距定位算法是一种常见的定位算法,常用于无人机、机器人等领域中的导航和定位。
三边测距定位算法的原理是利用三个位置已知的节点和它们之间的距离来计算出未知节点的位置。
这种算法具有精度高、可靠性强等优点,可以满足大部分定位需求。
三边测距定位算法的具体实现过程如下:首先,需要三个已知节点,它们的位置可以事先通过GPS等方式进行获取。
然后,需要进行三个节点之间的距离测量。
距离测量可以通过各种方式来实现,包括超声波测距、雷达测距、光电测距等。
测距完成后,需要将三个距离带入三边测距公式中进行计算,从而得出未知节点的位置。
三边测距定位算法的优点在于它具有相对较高的精度和可靠性。
由于三个节点的位置已知,因此只需要进行距离测量就可以确定未知节点的位置。
相比于其他定位算法,三边测距定位算法不需要进行复杂的计算,因此计算速度较快。
并且,三边测距定位算法的可扩展性强,可以通过增加节点的数量来提高定位的精度。
然而,三边测距定位算法也存在一些限制。
首先,节点之间的距离需要满足一定的条件,即三个节点需要不共线。
其次,距离测量精度对算法的影响较大,距离测量的误差会直接影响到定位的精度。
因此,
在实际应用过程中,需要选择合适的距离测量方式,并对测量结果进行校准和滤波。
最后,在特定的环境下,如密闭空间和信号干扰较大的环境下,三边测距定位算法的精度会受到限制。
总之,三边测距定位算法是一种精度高、可靠性强的定位算法,适用于大部分定位需求。
然而,在实际应用过程中,需要注意算法的限制和缺陷,并选择合适的距离测量方式和校准方法,从而得到更加准确的定位结果。