倾转旋翼飞机建模与仿真_杨喜立
- 格式:pdf
- 大小:223.33 KB
- 文档页数:4
直升机和倾转旋翼飞行器飞行仿真引论程序直升机和倾转旋翼飞行器飞行仿真引论程序引言:直升机和倾转旋翼飞行器是目前航空领域中备受关注的话题。
它们具有独特的飞行特性和广泛的应用领域,例如民用交通、军事任务和科学研究。
然而,设计和测试这些飞行器的过程非常复杂,需要大量的时间和资源。
这时,飞行仿真引论程序的运用就成为一种高效、经济和安全的方法。
1. 飞行仿真引论程序的概念和作用1.1 飞行仿真引论程序的定义飞行仿真引论程序是一种软件工具,旨在模拟直升机和倾转旋翼飞行器的飞行行为和性能。
它通过使用计算机模型和数值方法,将真实世界中的飞行条件和环境转换成虚拟的场景,以便进行仿真和测试。
1.2 飞行仿真引论程序的作用飞行仿真引论程序在直升机和倾转旋翼飞行器的设计、测试和培训中起着至关重要的作用。
它可以帮助工程师和飞行员在安全环境下评估飞行器的性能、稳定性和操纵特性。
飞行仿真引论程序还可以用于验证设计参数、优化飞行器的性能和改进操纵系统。
2. 飞行仿真引论程序的原理和流程2.1 飞行仿真引论程序的原理飞行仿真引论程序基于飞行动力学和控制理论,利用数值计算和仿真方法来模拟直升机和倾转旋翼飞行器的运动和飞行行为。
它主要包括以下几个方面的内容:- 飞行动力学建模:将飞行器的运动方程和操纵系统转化为数学模型。
- 环境建模:模拟飞行器在不同气象条件和飞行环境中的飞行特性。
- 飞行控制建模:设计和实现飞行器的操纵系统,包括舵面、发动机和电气系统。
2.2 飞行仿真引论程序的流程飞行仿真引论程序的工作流程大致分为以下几个步骤:- 数据收集和预处理:收集和整理直升机和倾转旋翼飞行器的相关数据,例如几何参数、惯性矩阵和飞机性能数据。
- 飞行器建模和参数化:根据数据和实际情况,建立直升机和倾转旋翼飞行器的数学模型,并对模型进行参数化。
- 场景建模和初始化:创建仿真场景,包括地形、天气和飞行器的初始状态。
- 运行仿真:运行飞行仿真引论程序,模拟飞行器在不同飞行条件下的运动和飞行特性。
《自动化技术与应用》2021年第40卷第2期辨识建模与仿真Identification Modeling and Simulation一种小型倾转旋翼无人机的建模与仿真黄潇,陈宏,巩伟杰(深圳大学机电与控制工程学院,广东深圳518060)摘要:传统无人机多为四旋翼无人机和固定翼无人机,现设计一种小型可倾转旋翼无人机,可实现垂直起降与悬停,并能在空中高速巡航。
建立该无人机的动力学模型,对该无人机的旋翼飞行模式,设计了基于滑模控制(Sliding Mode Control)的姿态控制器和位置控制器,并通过Matlab仿真和传统的PID算法进行比较验证。
仿真结果表明:基于滑模鲁棒控制的无人机,其姿态收敛过程和位置收敛过程都远快于传统控制方法。
关键词:可倾转旋翼;动力学模型;滑模控制;Matlab仿真中图分类号:TP273;V212.4文献标识码:A文章编号:1003-7241(2021)002-0104-05Modeling and Simulaton of a Small Scale Tilt-Rotor UAVHUANG Xiao,CHEN Hong,GONG Wei-jie(School of Mechanical and Control Engineering,Shenzhen University,Shenzhen518060China)Abstract:Traditional UAV are mostly quad rotor UAV and fixed wing UAV.A small scale tilt-rotor UAV is designed to achieve vertical takeoff and landing and hovering,and can cruise at high speed in the air.The dynamic model of the UAV is established.The attitude control and position controller based on the sliding mode robust control are designed for the tilting transition state of the UAV.The matlab simulation and the traditional pid algorithm are compared and verified.The simulation results show that the attitude convergence process and position convergence process of UAV based on sliding mode robust control are much faster than the traditional control method.Key words:tilt-rotor UAV;sliding mode control;dynamic model1引言随着科技的发展,无人机已经广泛运用到诸多领域。
直升机和倾转旋翼飞行器飞行仿真引论程序(最新版)目录1.引言2.直升机飞行仿真程序的发展历程3.倾转旋翼飞行器飞行仿真程序的发展历程4.直升机和倾转旋翼飞行器飞行仿真程序的比较5.结论正文1.引言直升机和倾转旋翼飞行器(VTOL,Vertical Take-Off and Landing)都是军民用航空领域的重要机种。
在实际应用中,它们需要经过严格的飞行测试和训练,以确保其性能和安全性。
然而,实际飞行测试和训练存在较高的风险和成本。
因此,飞行仿真程序应运而生,它们可以在计算机模拟的环境中对直升机和倾转旋翼飞行器进行飞行测试和训练,有效降低风险和成本。
本文将介绍直升机和倾转旋翼飞行器飞行仿真程序的发展历程、特点及其比较。
2.直升机飞行仿真程序的发展历程直升机飞行仿真程序的发展可以追溯到 20 世纪 60 年代。
早期的直升机飞行仿真程序主要采用数学模型和简单的图形界面,功能较为单一,主要用于直升机的基本性能和飞行特性分析。
随着计算机技术的发展,直升机飞行仿真程序逐渐演变为复杂的三维仿真环境,可以模拟各种气象条件、地形地貌和飞行场景,为直升机飞行员提供更为真实的训练环境。
3.倾转旋翼飞行器飞行仿真程序的发展历程倾转旋翼飞行器飞行仿真程序的发展较直升机飞行仿真程序稍晚。
20世纪 70 年代,美国国防部开始投资研发倾转旋翼飞行器的飞行仿真程序。
早期的倾转旋翼飞行器飞行仿真程序主要针对特定型号的飞行器,功能相对单一。
随着技术的进步,现代倾转旋翼飞行器飞行仿真程序已经可以模拟多种型号的飞行器,具备完善的气象、地形和任务模块,能够满足不同用户的需求。
4.直升机和倾转旋翼飞行器飞行仿真程序的比较直升机和倾转旋翼飞行器飞行仿真程序在某些方面存在相似之处,但也有显著的不同。
首先,在模型精度方面,由于直升机的飞行特性与倾转旋翼飞行器差异较大,因此两者的模型精度要求也不同。
直升机飞行仿真程序需要更为精确的模型和参数,以模拟其复杂的气动特性;而倾转旋翼飞行器飞行仿真程序则相对简化。

无人倾转旋翼机飞行力学建模与姿态控制技术研究一、本文概述随着无人驾驶技术的快速发展,无人倾转旋翼机作为一种新型的飞行器,在军事侦察、民用救援、环境监测等领域展现出巨大的应用潜力。
本文旨在深入研究无人倾转旋翼机的飞行动力学建模与姿态控制技术,以提高其飞行性能、安全性和任务执行效率。
本文将首先介绍无人倾转旋翼机的结构特点和工作原理,分析其飞行动力学特性。
在此基础上,建立无人倾转旋翼机的飞行动力学模型,该模型将包括飞行器的运动方程、动力学方程以及约束条件等。
通过该模型,可以全面描述无人倾转旋翼机的飞行状态,为后续的姿态控制技术研究提供基础。
随后,本文将重点研究无人倾转旋翼机的姿态控制技术。
分析无人倾转旋翼机在飞行过程中面临的姿态控制问题,如飞行稳定性、抗风干扰等。
设计相应的姿态控制算法,如PID控制、模糊控制、神经网络控制等,以提高无人倾转旋翼机的姿态控制精度和稳定性。
同时,还将探讨如何结合无人倾转旋翼机的飞行动力学模型,对姿态控制算法进行优化和改进,以进一步提升其飞行性能。
本文将通过仿真实验和实地飞行测试,对所建立的飞行动力学模型和设计的姿态控制算法进行验证和评估。
通过对比分析实验结果,评估无人倾转旋翼机的飞行性能和姿态控制效果,为进一步优化设计和实际应用提供有力支持。
本文旨在通过深入研究无人倾转旋翼机的飞行动力学建模与姿态控制技术,为其在实际应用中的性能提升和安全保障提供理论支持和技术指导。
二、无人倾转旋翼机概述无人倾转旋翼机是一种独特的垂直起降(VTOL)飞行器,结合了固定翼飞机和直升机的优点,能够在垂直起降和高速飞行之间实现无缝切换。
这种飞行器通过改变旋翼的倾转角度,实现从垂直起降到水平飞行的过渡,反之亦然。
这种灵活性使得无人倾转旋翼机在军事侦察、民用救援、环境监测、农业喷洒等众多领域具有广阔的应用前景。
无人倾转旋翼机的设计和控制比传统固定翼飞机或直升机更为复杂。
它需要在保证垂直起降的稳定性和安全性的同时,还要确保在高速飞行时的性能。

一款倾转旋翼电动垂直起降飞行器虚拟仿真设计陈泊霖 闫鸣浩 刘芳芳 陈靖昊 范乃文 王东源(中国民航大学 天津 300300)摘要:该文主要研究如何使用虚拟仿真技术及软件设计一款倾转旋翼电动垂直起降飞行器。
通过市场调研了解市面上此类型电动垂直起降飞行器的具体性能参数,以此为参考设计该项目中飞行器的性能参数,同时还研究了倾转旋翼eVTOL垂直起降飞行器作为一类特殊飞行器在虚拟仿真实现过程中涵盖的主要关键技术,探索电动垂直起降飞行器未来的发展路线,并对飞行器进行3D建模,实现倾转旋翼eVTOL飞行器在安胜FAM/eVTOL生态仿真系统中进行演示,以验证及展示其设计。
关键词:倾转旋翼eVTOL飞行器 气动分析 总体设计 3D建模中图分类号:V271;TP391.9文献标识码:A 文章编号:1672-3791(2023)19-0070-06 Virtual Simulation Design of a Tilt-Rotor Electric VerticalTake-Off and Landing AircraftCHEN Bolin YAN Minghao LIU Fangfang CHEN Jinghao FAN Naiwen WANG Dongyuan(Civil Aviation University of China, Tianjin, 300300 China)Abstract:This paper mainly studies how to use virtual simulation technology and software to design a tilt-rotor electric vertical take-off and landing (eVTOL) aircraft. It is necessary to understand the specific performance pa‐rameters of this type of eVTOL aircraft on the market to design the performance parameters of the aircraft in this project through market research, and it is necessary to identify the main key technologies covered by of the tilt-rotor eVTOL aircraft, as a special type of aircraft, in the virtual simulation implementation process, explore the fu‐ture development route of the eVTOL aircraft and proceed to 3D model of the aircraft, so as to demonstrate the tilt-rotor eVTOL aircraft in the Ansun FAM/eVTOL ecological simulation system and verify and demonstrate its design. Key Words: Tilt-rotor eVTOL aircraft; Aerodynamic analysis; Overall design; 3D modelling1 绪论1.1 研究背景与意义随着科技的发展,目前无人机主要用于地理测绘、农业植保、能源检测、救援救灾等领域。
倾转旋翼飞机倾转机构设计及优化
张宝玉;李德彪;霍亚东
【期刊名称】《机械设计》
【年(卷),期】2024(41)3
【摘要】倾转机构在倾转旋翼机过渡飞行阶段起着重要作用。
文中以某倾转旋翼机倾转机构为研究对象,建立计算数学模型,研究传动角随作动器固定点变化规律,并以整个倾转过程中传动角算术平均值最大为优化目标,得到作动器固定位置最优点,并以该点为研究目标,当作动器匀速运动时,研究倾转角度及角速度随时间变化规律,为倾转机构控制提供参考。
研究结果表明:固定点位置横向距离为4r、纵向距离为0.7r时,倾转过程平均传动角最大为67.369°;当作动器匀速运动时,倾转机构角度接近线性增加,角速度先降低,后提高,呈类抛物线规律。
【总页数】4页(P136-139)
【作者】张宝玉;李德彪;霍亚东
【作者单位】北京中航智科技有限公司
【正文语种】中文
【中图分类】TH122
【相关文献】
1.新型可倾转旋翼的四旋翼飞行器结构设计
2.面向方案设计的倾转旋翼飞机短距起飞性能
3.倾转三旋翼无人机倾转定高控制研究
4.国内优秀男子跳远运动员起跳技术的运动学分析
5.四倾转旋翼无人飞行器倾转旋翼系统模块化设计方法研究
因版权原因,仅展示原文概要,查看原文内容请购买。
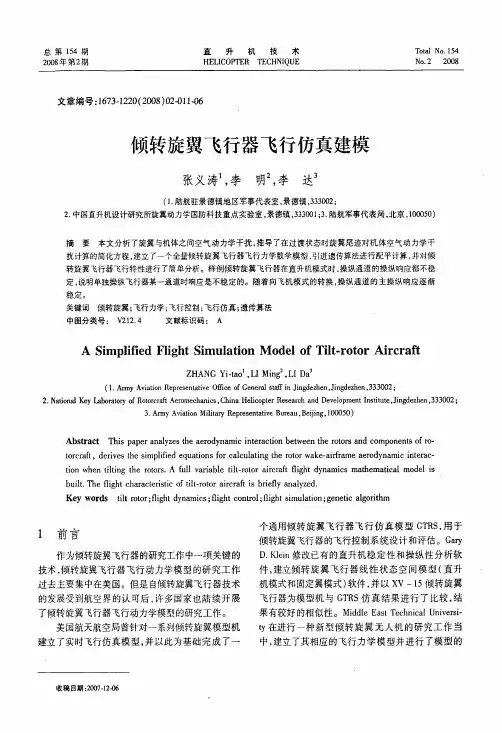
总第154期2008年第2期直升机技术H E L I C O P TER TE C H N I Q U ETot al N o.154N o.22008文章编号:1673—1220(2008)02-011-06倾转旋翼飞行器飞行仿真建模张义涛1,李明2,李达3(1.陆航驻景德镇地区军事代表室,景德镇,333002;2.中国直升机设计研究所旋翼动力学国防科技重点实验室,景德镇,333001;3.陆航军事代表局,北京,100050)摘要本文分析了旋翼与机体之问空气动力学干扰,推导了在过渡状态时旋翼尾迹对机体空气动力学干扰计算的简化方程,建立了一个全量倾转旋翼飞行器飞行力学数学模型,引进遗传算法进行配平计算,并对倾转旋翼飞行器飞行特性进行了简单分析。
样例倾转旋翼飞行器在直升机模式时,操纵通道的操纵响应都不稳定,说明单独操纵飞行器某一通道时响应是不稳定的。
随着向飞机模式的转换,操纵通道的主操纵响应逐渐稳定。
关键词倾转旋翼;飞行力学;飞行控制;飞行仿真;遗传算法中图分类号:V212.4文献标识码:AA Si m pl i f i ed Fl i ght Si m ul at i on M odel of Ti l t—r ot or A i r cr af tZ H A N G Y i—t a01,L I M i n92,L I D a3(1.A rm y A vi at i on R epr esent at i ve O f i qee of G e ne r al s taf f i n Ji ng dezhen,Ji ngd ezhen,333002;2.N at i ona l K ey L abor at or y of R ot orer af t A e r om ee ha ni e s,C hi na H el i copt er R e se ar c h a nd D evel op m ent I ns t i t ut e,J i ngdezhen,333002;3.A r m y A vi at i on M i l i t ar y R ep r esen t at i ve B ur eau,B ei j i ng,100050)A bs t r act Th i s paper a na l yz es t he aer ody nam i c i nt er ac t i on bet w een t he r ot or s and com po nent s of r ot or c r af l,der i ve s t he si m pl i f i e d e qua t i ons f or c al cul a t i ng t he r ot or w ake—a i rf ra m e aer odynam i c i nt erac—t i on w hen t i l ti ng t he r ot or s.A f ull vari a bl e t il t—r ot o r ai r c r af t f l i ght dyna m i cs m at hem at i cal m od el i sbui l t.T he f l i ght char ac t er i st i c of t il t—rot or ai r cr af t i s br i e f l y ana l yzed.K ey w or ds t i l t r ot or;f l i ght dyna m i c s;f l i ght cont r ol;f l i ght si m ul a t i on;ge ne t i c a l gori t hm1前言作为倾转旋翼飞行器的研究工作中一项关键的技术,倾转旋翼飞行器飞行动力学模型的研究工作过去主要集中在美国。
直升机和倾转旋翼飞行器飞行仿真引论程序摘要:一、引言二、直升机和倾转旋翼飞行器概述1.直升机原理2.倾转旋翼飞行器原理三、飞行仿真技术在直升机和倾转旋翼飞行器中的应用1.飞行仿真技术的重要性2.仿真技术的应用领域四、直升机和倾转旋翼飞行器飞行仿真引论程序设计1.程序设计目标2.程序设计方法3.程序实现的关键技术五、结论正文:一、引言随着航空工业的飞速发展,直升机和倾转旋翼飞行器在军事、民用等领域发挥着越来越重要的作用。
为了提高飞行器的性能、降低研发成本和缩短研发周期,飞行仿真技术成为了必不可少的手段。
本文将探讨直升机和倾转旋翼飞行器飞行仿真引论程序的设计。
二、直升机和倾转旋翼飞行器概述1.直升机原理直升机是一种以旋翼为主要升力装置,通过旋翼与空气的相互作用产生升力,使飞行器垂直起降和沿飞行方向前进的航空器。
直升机的旋翼通过改变桨距或倾斜旋翼来实现飞行姿态的调整。
2.倾转旋翼飞行器原理倾转旋翼飞行器是一种将固定翼飞机和直升机的优点相结合的飞行器。
它通过将旋翼沿一个固定轴线倾转,实现从直升机模式到固定翼飞机模式的转换。
在直升机模式下,旋翼产生垂直升力;在固定翼飞机模式下,旋翼产生水平推力。
三、飞行仿真技术在直升机和倾转旋翼飞行器中的应用1.飞行仿真技术的重要性飞行仿真技术可以模拟飞行器在各种飞行条件下的表现,对飞行器的性能进行测试和优化。
这对于直升机和倾转旋翼飞行器的研发具有重大意义。
2.仿真技术的应用领域飞行仿真技术广泛应用于飞行器控制系统的设计与验证、飞行器性能测试、飞行器驾驶员训练等方面。
四、直升机和倾转旋翼飞行器飞行仿真引论程序设计1.程序设计目标设计一个直升机和倾转旋翼飞行器飞行仿真引论程序,实现对飞行器飞行性能的仿真模拟。
2.程序设计方法采用现代计算机编程技术和飞行力学原理,结合实际飞行数据和经验公式,编写程序实现飞行仿真。
3.程序实现的关键技术程序实现的关键技术包括:飞行器模型构建、飞行力学方程求解、飞行器控制律设计、仿真算法设计等。
倾转旋翼机模型及仿真
唐亮;徐庆九;赵鹏
【期刊名称】《四川兵工学报》
【年(卷),期】2012(033)010
【摘要】对倾转旋翼机动力学模型进行理论分析,运用叶素理论来建立旋翼的动力学模型和旋翼挥舞角的表达式;而机翼、机身、平尾和垂尾动力学模型的建立则采用成熟的升力线模型;对于旋翼对机体其他部分的气动干扰问题,只考虑旋翼对机翼的气动干扰;在Matlab/Simulink仿真环境中建立倾转旋翼机的仿真模型,并以XV-15倾转旋翼机为样例机,验证所建模型的合理性。
【总页数】4页(P18-20,33)
【作者】唐亮;徐庆九;赵鹏
【作者单位】海军航空工程学院控制工程系,山东烟台264001;海军航空工程学院控制工程系,山东烟台264001;91911部队,海南三亚572000
【正文语种】中文
【中图分类】V211.52
【相关文献】
1.航空、航天系统工程——倾转旋翼机模拟平台建模与仿真 [J], 余长杰;朱纪洪;胡春华;孙增圻
2.倾转旋翼机短舱倾转机构动力学仿真分析 [J], 王惟栋;庞华华;王斌团
3.倾转旋翼机转动机构运动学仿真分析 [J], 吉国明;郑配云;邓茅菁;许军强
4.基于最优控制理论的倾转旋翼机跃障飞行仿真 [J], 陈金鹤;汪正中;田洪源
5.力矩不可达情况下的控制分配算法及其在倾转旋翼机中的仿真研究 [J], 严鹏;刘春生;马诚诚;鲁可
因版权原因,仅展示原文概要,查看原文内容请购买。
基于虚拟样机技术倾转四旋翼飞行器联合仿真
周进;张东升;梅雪松;李泽州
【期刊名称】《计算机仿真》
【年(卷),期】2015(32)1
【摘要】为了解决倾转四旋翼飞行器的机械系统及控制系统的设计问题,首先在ADAMS软件中建立倾转四旋翼飞行器的虚拟样机机械模型,同时在
MATLAB/Simulink环境中引入了跟踪微分器并建立了非线性串级PID控制系统模型,然后通过搭建共享的虚拟样机模型实现联合仿真,最终得到机械系统和控制系统优化后的设计方案.仿真结果表明:倾转四旋翼飞行器的姿态调整过程稳定,具有很好的动态响应特性,为今后旋翼倾转过程的理论分析打下了良好的基础.
【总页数】5页(P94-98)
【作者】周进;张东升;梅雪松;李泽州
【作者单位】西安交通大学机械工程学院,陕西西安710049;西安交通大学机械工程学院,陕西西安710049;西安交通大学机械工程学院,陕西西安710049;西安交通大学机械工程学院,陕西西安710049
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.一种小型倾转四旋翼飞行器的轨迹控制 [J], 沈杨杨;杨忠;徐浩;李劲松;杨轻
2.基于虚拟样机技术的转鼓有限元仿真研究 [J], 毛文贵;夏平;谭立新
3.过渡状态倾转四旋翼飞行器动量源模拟方法及气动特性研究 [J], 陈天予; 徐逸; 梁壮; 王皓
4.过渡状态倾转四旋翼飞行器动量源模拟方法及气动特性研究 [J], 陈天予; 徐逸; 梁壮; 王皓
5.倾转四旋翼飞行器直升机模式操稳特性分析 [J], 周攀;陈仁良;俞志明
因版权原因,仅展示原文概要,查看原文内容请购买。