自适应滤波器原理NLMS算法
- 格式:pptx
- 大小:524.94 KB
- 文档页数:32
自适应降噪是一种通过自动调整滤波器参数,实时抑制噪声的技术。
它主要用于音频处理、图像处理和通信领域。
其基本原理是通过获取输入信号和噪声的统计特性,利用适应性滤波器抑制噪声成分。
具体步骤如下:
估计噪声:首先需要确定噪声的统计特性。
可以通过预设模型或者实时采样得到一个噪声样本。
获取输入信号:将待处理的信号输入到降噪系统中。
生成参考信号:通过对输入信号进行滤波,得到一个不包含噪声的参考信号。
误差计算:将参考信号与输入信号相减,得到一个误差信号。
该误差信号反映了输入信号中的噪声成分。
参数调整:根据误差信号的统计特性,调整适应性滤波器的参数。
通常使用自适应算法(如LMS算法或NLMS算法)来实现参数的更新。
降噪输出:将调整后的适应性滤波器应用于输入信号上,得到降噪后的输出信号。
这个过程是一个迭代的过程,通过多次更新滤波器的参数,逐渐减小误差信号中的噪声成分,从而实现对输入信号的降噪。
需要注意的是,在实际应用中,选择适当的滤波器结构、参数更新速率和噪声估计方法等都会对降噪效果产生影响。
因此,为了实现良好的降噪效果,需要根据具体的应用场景进行参数调优和算法选择。
adf原理
ADF(Adaptive Filter Design)是一种自适应滤波器设计方法,广泛应用于信号处理、通信和控制系统中。
该方法根据输入和输出信号之间的误差来调整滤波器的参数,以使输出信号尽可能地接近期望的信号。
ADF的基本原理是根据输入信号的统计性质,通过将滤波器
系数依次加以修正,从而使输出信号最小化与期望信号之间的误差。
该修正过程是迭代进行的,通过不断调整滤波器的参数,直到输出信号的误差最小化为止。
为了实现自适应滤波器的优化设计,ADF使用了一系列的算
法和技术。
其中,最常用的方法是最小均方误差(LMS)算
法和最小均方根误差(NLMS)算法。
这些算法根据误差信号
的统计特性来调整滤波器的系数,以达到最小化误差的目标。
在实际应用中,ADF具有很高的灵活性和适应性。
它可以自
动适应不同的输入信号和环境条件,从而提供更好的滤波效果。
此外,ADF还可以用于解决非线性和时变系统的滤波问题,
使得信号处理和控制系统更加稳定和可靠。
总的来说,ADF通过自适应调整滤波器的参数,以使输出信
号与期望信号之间的误差最小化。
这种方法可以提高信号处理和控制系统的性能和稳定性,并在许多领域中得到广泛应用。
自适应滤波理论及算法研究自适应滤波是一种常见的信号处理技术,其应用广泛于图像处理、音频处理、通信系统等领域。
本文将对自适应滤波的理论及算法进行研究与分析。
首先,我们来介绍一下自适应滤波的基本概念。
自适应滤波是指根据输入信号的特性和系统的响应,动态地调整滤波器的参数,以实现对信号的最优处理。
传统的固定滤波器需要提前设置好参数,而自适应滤波器能够根据输入信号的实时变化进行调整,更加适应不同场景的信号处理需求。
接下来,我们将重点研究自适应滤波的理论基础。
自适应滤波的核心思想是根据输入信号和期望输出信号之间的误差,迭代地调整滤波器参数,使误差尽可能地减小。
其中,最常用的自适应滤波算法是最小均方(Mean Square Error, MSE)算法。
MSE算法通过最小化误差的平方和,来寻找最优的滤波器参数。
它利用了输入信号和期望输出信号的统计特性,实现了自适应滤波的效果。
随着深度学习的兴起,神经网络在自适应滤波中得到了广泛应用。
神经网络具有非线性映射的能力,能够更好地适应信号的非线性特性。
深度学习算法通过训练神经网络,将输入信号与期望输出信号进行匹配,从而得到适用于特定信号处理任务的自适应滤波器。
深度学习算法在图像处理、音频降噪等领域取得了显著的成果。
在实际应用中,自适应滤波器的性能往往受到一些因素的影响。
首先是滤波器的步长选择。
步长决定了每次迭代中参数的更新速度,过大的步长可能导致滤波器过早收敛,过小的步长则会延缓收敛速度。
为了获得最佳的参数设置,研究人员通过模拟实验和理论分析,提出了一系列优化方法。
另外一个重要因素是滤波器的收敛性能。
如果滤波器能够在有限步骤内收敛到最优解,我们称其为有限时间收敛。
而有些情况下,滤波器可能无法在有限时间内收敛,这就需要采用一些收敛性保证的技巧。
研究人员提出了一些收敛性分析方法,如平均收敛时间分析、收敛速率分析等。
此外,自适应滤波算法的计算复杂度也是一个需要考虑的问题。
一些复杂的自适应算法会导致大量的计算消耗,限制了其在实际应用中的可行性。
自适应滤波算法原理及其应用自适应滤波算法是一种能够自动调整滤波参数的信号处理方法。
它根据当前的输入信号和噪声情况,通过不断迭代计算更新滤波器的系数,使得滤波器能够适应不同的输入信号并实现有效的噪声抑制。
自适应滤波的基本原理是通过最小均方差准则,寻找滤波器的最优系数。
它通过最小化滤波输出与原始信号之间的均方差差异,来优化滤波器的性能。
自适应滤波器将输入信号与待估计的滤波系数进行卷积运算,得到滤波输出信号。
然后根据输出信号与实际信号之间的误差,来调整滤波器的系数。
通过不断迭代,最终得到一个最佳的滤波器参数。
自适应滤波在信号处理领域有广泛的应用。
其中一个主要应用是在通信领域,用于抑制信号中的噪声和干扰。
自适应滤波能够有效地降低通信信号中的噪声,提高通信系统的性能。
另外,自适应滤波也常用于图像处理领域,用于去除图像中的噪声和增强图像的质量。
通过自适应滤波,能够减少图像中的噪点、平滑图像边缘等,使得图像更加清晰和易于分析。
此外,自适应滤波还可以应用在语音处理、雷达信号处理、生物医学信号处理等领域。
例如,在语音处理中,自适应滤波可以在语音的捕获和传输过程中,自动抑制环境噪声和回声,提高语音的清晰度和理解度。
在雷达信号处理中,自适应滤波可以去除雷达回波中的杂波和干扰,提高目标的探测和跟踪性能。
在生物医学信号处理中,自适应滤波可以去除脑电图(EEG)或心电图(ECG)等生物信号中的噪声和干扰,以提取有用的生理信息。
总之,自适应滤波算法是一种基于最小均方差准则的信号处理方法,能够根据输入信号和噪声情况自动调整滤波器的系数,从而实现有效的噪声抑制。
它在通信、图像处理、语音处理、雷达信号处理、生物医学信号处理等领域有广泛应用。
通过自适应滤波,能够提高系统的性能和提取有用信号的质量。

2011年1月第27卷第1期 沈阳建筑大学学报(自然科学版)Journal of Shenyang J ianzhu U niversity (N atural Science ) Jan. 2011V ol.27,N o.1 收稿日期:2010-03-03基金项目:辽宁省博士启动基金项目(20071003);辽宁省教育厅基金项目(2009B150)作者简介:戴敬(1968—),女,副教授,博士,主要从事微型化分析仪器检测与控制,射频领域信号检测与处理研究.文章编号:1671-2021(2011)01-0190-06N LM S 自适应滤波器的FPGA 实现戴 敬1,赵延洲1,张 辉1,田 越2,白浠霖1(1.沈阳建筑大学信息与控制工程学院,辽宁沈阳110168;2.奥维通信股份有限公司,辽宁沈阳110179)摘 要:目的采用FPG A 芯片实现NLMS 算法,从而生成高性能的自适应滤波器来滤除通信信号中时变、未知的干扰信号,得到高质量的通信信号.方法通过对LMS 及其改进算法的原理讨论及比较,确定适合于FPG A 芯片上实现的NLMS 算法,并对算法的具体实现方法进行论述.采用分段移位的方法实现除法运算,从而提高运算速度.结果通过对输出信号的频谱分析,当信号带宽为200kHz,频率偏离中心频率010875MHz 时,衰减达到了99121dB.结论本设计能高速度、高质量地滤除通信信道中的干扰信号,并很好地处理了FPG A 的资源与速度的关系,能满足高速信号处理的要求.关键词:自适应滤波器;FPGA;LM S;NLM S;M A TLAB 中图分类号:TN 713+7 文献标志码:A The FPGA I mple ment ati on of N LM S Adapti ve FilterDA I J i ng 1,ZHAO Y anzhou 1,ZHANG Hui 1,TI AN Y ue 2,BA I Xilin1(1.School of Infor m ation and C ontrol Engineering,Shenyang J ianzhu U niversity,Shenyang,C hina,110168;2.A ll w in Telecom 2m unication C om pany,Shenyang,C hina,110179)Abstract:A n adap tive filter w as i m p lem en ted in this paper,w hich w as based on NLM S algorithm.H igh per 2for m ance signals cou ld be obtained by filtering the ti m e 2varying and unknow n interferences in the comm uni 2cation channels .The NLM S algorithm w as achieved by considering the p rinci p le of LM S algorithm and its i m p rovem ents .It w as concluded that NLM S algo rithm could be i m p lem ented on FPGA chips .This paper de 2scribed the m ethod of the specific i m p lem entation as w ell .Th is m ethod introduced bit 2shift in ter m s of sub 2section instead of division com p ution,by w hich the operation speed of FPGA w as g reatly i m p roved .The spectrogram of the out p ut signals p roved that the attenuation reached to 99121dB w hen the signal bandw id th w as 200KH z and the frequency w as 010875M H z offset from the center frequency .The adap tive filter cou ld effectively filter the in terferences in the comm unication channels and sp lit the d ifferences bet w een the re 2sou rces and areas of the FPGA chips,m eeting the requirem en ts of high 2speed signal p rocessing .Key words:adap tive filter ;FPGA;LM S;NLM S;M A TLAB 数字信号处理已在很多领域广泛应用,它是现今通信行业中最重要的环节,可实现频带选择、滤波等功能,它能满足滤波器对幅度和相位特性的要求[1],而自适应滤波器和信息论、优化理论、检测与估计理论等密切相关,是近20多年来发展起来的信息科学的一个重要分支,并在通信、雷达以及许多领域获得了广泛应用.自适应滤波器通过自适应算法调整权系数来滤除时变、未知的干第27卷戴 敬等:NLM S 自适应滤波器的FPGA 实现191 扰信号,得到高质量的通信信号.设计它的目的和意义就是在输入过程的统计特性未知时,自动跟踪和自我调整来满足某种最佳准则的要求[2].W idrow 和H off 提出的最小均方误差法(L east M ean Square,LM S )和高斯提出的递归最小二乘法(R ecursive L east Squares,RL S )是其中两种最典型的算法.LM S 算法因为实现简单、鲁棒性好、对信号统计特性变化具有稳健性因而得到了广泛的应用.它是基于最小均方误差准则(M ini m um M ean S quare E rror,MM S E )的维纳滤波器和最陡下降法而提出的[3].LM S 算法的收敛速度比RL S 算法慢,但是需要的资源比RL S 算法要少很多.同样,RL S 算法能够快速收敛,极好的性能,但是以增加计算复杂度和降低计算稳定性为代价的.因此在高速信号处理中,一般都采用LM S 算法及其各种改进算法.之前因为技术的原因,FPGA 的资源非常有限,无法用它实现自适应滤波器.随着技术的发展,FPGA 内部资源呈几何倍数的增长.自适应滤波器的FPGA 实现才开始受到重视.笔者采用FPGA 实现基于NLM S 算法的自适应滤波器,并且采用分阶段移位的方法取代了影响信号处理速度的除法器,从而大大地加快了信号的处理速度.仿真结果证明笔者设计的NLM S 自适应滤波器性能良好,完全能满足高速信号处理的要求.1 自适应滤波LM S 算法原理自适应滤波器的设计原理如图1所示.图1 自适应滤波器的原理图F i g 11 The schem atic diagram of the adap tive filter图中,d (n )为期望信号;y (n )为滤波器的输出信号;e (n )为误差信号;用来调整自适应滤波器的抽头系数.111 定步长LM S 算法原理基于定步长LM S 算法自适应滤波器的结构图如图2所示.图2 基于定步长LM S 算法的N 阶自适应滤波器结构图F i g 12 The structure diagram of N 2order adap tive filter based on LM S 基于定步长LM S 算法原理如下[4-5]:抽头权系数向量为ω,则输出函数为 y (n )=∑ni =1ω(i )x (n -i +1)=ωT X (n ).(1)目标函数的最佳滤波器系数递归关系为[6]ω(n +1)=ω(n )+μx (n )e 3(n ).(2)算法的失调系数δ为[7]δ=μTr R =μM P in .(3)式中:μ为步长因子;Tr R 为自相关矩阵R 的迹;M 为滤波器阶数;P in 为输入信号功率.由此可知,滤波器的步长因子越长,阶数越高,输入信号的功率越大,滤波器的失调系数就越大[8].112 归一化LM S (NLM S )算法原理为了改变滤波器失调情况,学者们推导出了很多改进算法,归一化LM S 算法是其中之一.由式(3)可知:如果使LM S 算法的μ值随着输入功192 沈阳建筑大学学报(自然科学版)第27卷率Pin成反比,则失调系数将保持不变,为此确立一个关于μ的函数μ(n),令μ(n)=δηTrR.(4)η为介于0和1之间的常数,这样就可以保证LM S算法的失调系数为一个定值[9].即令μ(n)=ηx H(n)x(n).(5)其中,x H(n)为x(n)的厄尔米特矩阵.在实际应用时,式(5)的分母有时很小,从而使收敛不稳定,因此通常采用式(6)作为归一化算法系数的递归式[10-11]ω(n+1)=ω(n)+ηx H(n)x(n)+Ψe3(n)x(n).(6)式中:Ψ为常数.将式(6)与式(2)比较,就可以发现NLM S算法其实是一种变步长LM S算法,它通过间接改变步长因子来加快收敛速度[12].113 符号LM S算法原理符号LM S算法也利用随机梯度达到最优解,但只给出梯度迭代的方向不给出具体改变量[13].其系数递归公式为ω(n+1)=ω(n)+μ・sign[e(n)]・x(n).(7)ω(n+1)=ω(n)+μ・e(n)・sign[x(n)].(8)其中,sign[]表示符号函数.式(7)是误差的符号LM S算法,式(8)是输入信号的符号LM S算法.在步长和滤波器阶数相同的情况下,三种LM S算法的均方误差的收敛情况如图3所示. 由图3可以看出,在相同步长的情况下,定步长LM S算法收敛的最慢,符号LM S算法次之, NLM S算法收敛最快.但是符号LM S算法收敛虽然快,但是它只给出了变化的方向,没有给出具体的变化尺度.这样虽然节省了硬件乘法器,但是运算过程却不稳定,除了硬件资源极度匮乏的情况之外,很少采用符号LM S算法.综合考虑各种算法的收敛速度以及FPGA硬件资源的消耗情况,采用NLM S算法实现自适应滤波.图3 三种LM S算法的均方误差F i g13 The m ean square error of three LM S algorithm s2 NLM S算法自适应滤波器的FP2 GA实现 笔者要设计一个输入和输出信号位宽为16位,输入信号的多径干扰为9径的NLM S算法自适应滤波器,采用的FPGA芯片是X ilinx公司生产的V irtex5系列,设计语言是V erilog D HL,使用m odelsi m进行仿真,之后将仿真结果送入M A T2 LAB进行频域分析. 在设计自适应滤波器之前,必须首先确定滤波器的阶数.自适应滤波器的阶数要大于或等于多径干扰的径数,这样才能保证自适应滤波器的性能达到最佳[14].根据美国直放站厂商安德鲁的测试,在人口密集地区,多径干扰的径数为6~9.因此选定自适应滤波器的阶数为10.在使用FPGA实现NLM S算法之前,首先要确定步长因子η和定值ψ.这是因为步长因子越小,算法收敛后的误差就越小,但是如果因子选得太小,就不能快速收敛,因此要根据实际情况选择步长因子的值.同样,在运算的过程中,步长因子μ(n)的运算过程中出现了除法.除法在FPGA设计中是要尽量避免的运算,尽量以移位运算代替.而且X il2 inx提供的除法器IP核需要19个周期的延时,这样会大大降低滤波器的处理速度.因此本设计采用了如下的替代方法.因为μ(n)始终小于1,大于0,因此它与e(n)的乘法运算可以归结为移位运算.第27卷戴 敬等:NLM S 自适应滤波器的FPGA 实现193 根据式(6)可得:μ(n )=ηx H(n )x (n )+Ψ.(9)设η=1/256,Ψ=1,则μ(n )m ax =1/256=2-8,μ(n )m in =1/274877906945≈2-38.因为e (n )的位宽为32位,所以采用分段近似的方法,即当x H(n )x (n )=0的时候,将e (n )左移8位既可;1≤x H(n )x (n )≤2时,将e (n )左移9位;3≤x H(n )x (n )≤7时将e (n )左移10位;…;依次类推,当x H(n )x (n )≥4194303时,将e (n )左移31位.这样就可以通过移位代替除法运算,减少延时.运算过程中同样要处理好每一次加法运算的输出结果,适当的对计算结果进行扩位,防止计算结果数据溢出.最后再适当对输出信号进行截位.如果截位不当,会造成输出信号不理想.NLM S 自适应滤波器FPGA 单阶实现的结构如图4所示. 图4中判决器是一个状态选择结构,它的作用是根据先前生成的x H(n )x (n )的不同范围来产生不同的移位因子,然后将移位因子输出. 移位器用来对误差信号进行移位和截取.因为自适应算法部分的乘法器、判决器,移位器会分别产生1个周期的延时.因此,x (n )也要延时3个周期防止产生时序混乱.图4 单阶NLM S 自适应滤波器结构图F i g 14 The structure diagra m of 12order NLM S adap tive filter 通过乘法器,判决器和移位器代替除法器,至少减少了17个周期的延时,加快了数据的处理速度.左边第一个乘法器用来对每个周期输入的x (n )进行平方运算.之后将平方值送给判决器进行移位因子选择.另一个乘法器将对应周期的输入信号和权系数相乘.加法器是一个并行加法器,负责将每个抽头的权系数和对应的x (n )的乘积相加.Z -3对输入信号x (n )进行三个周期的延时.它通过调用X ilinx 的移位寄存器的IP 核实现.程序编译后生成的R TL 电路如图5所示.图5 NLM S 自适应滤波器R TL 布线图F i g 15 The R TL w iring diagram of NLM S adap tive filter3 系统仿真仿真时用M A TLAB 生成输入信号x (n )和期望信号d (n ).x (n )为加入了多径干扰的正弦信号,信干比为-15dB.d (n )为无噪声的正弦信号.数据率为100M H z .它们的波形分别如图6和7所示.然后将信号数据送入m odelsi m 进行仿真.194 沈阳建筑大学学报(自然科学版)第27卷图6 输入信号F i g 16 The input signals图7 期望信号F i g 17 The desired signals 仿真完毕之后,m odelsi m 生成的输出结果如图8中所示的eout:图8 M odelsi m 仿真结果F i g 18 M odelsi m si m ulation result 将仿真结果eout 从m odelsi m 导出,利用m atlab 分析自适应滤波器输出结果的频谱图波形[15].输入信号的频谱和干扰消除后信号的频谱如图9所示.图9 自适应滤波器性能对比F i g 19 A dap tive filter perfor m ance com parison第27卷戴 敬等:NLM S自适应滤波器的FPGA实现195 由图9可以看出:图9(a)中输入信号完全淹没在了噪声之中,而笔者设计的NLM S算法自适应滤波器能够滤除干扰,得到很好的输出信号频谱.图9(b)输出信号频谱的归一化频率为数据率的奈奎斯特极限频率,即50M H z.带宽为200kH z,中心频点在0105π.当输入信号的频率偏移中心频点010875M H z时,衰减达到99121 dB.由此可以看出,自适应滤波器对带外的衰减效果已经比较好,完全能够满足信号处理的要求.4 结 论基于FPGA的NLM S算法的实现是一种变步长的LM S算法,它通过统计输入信号的特征函数来改变每次运算的步长.这样可以根据输入数据的大小自适应地加快收敛速度.笔者在FPGA 实现的过程中通过划分区间移位来实现除法运算,虽然损失了一些精度,但是大大减小了延时,加快了数据的处理速度,很好的符合了高速信号处理的要求,而且这种方法占用的资源要远远小于除法器IP核,在FPGA设计的过程中,很好地处理了FPGA资源利用和速度的关系.参考文献:[1] 龚耀寰.自适应滤波-时域自适应滤波和智能天线[M].2版.北京:电子工业出版社,2003. (G ong Yaohuan.A dap tive filtering2ti m e2dom ain a2dap tive filtering and sm art antennas[M].2nd ed.B eijing:Publishing H ouse of Electronics Industry,2003.)[2] 田耘,徐文波,张延伟,等.无线通信FPGA设计[M].北京:电子工业出版社,2008. (Tian Yun,X u W enbo,Zhang Yanw ei,et al.W ire2 less FPGA design[M].B eijing:Publishing H ouse ofElectronics Industry,2008.)[3] S ivakum ar B,S ubha R ani S,R avi K iran V S V,et al.A dap tive filter app roaches for interference supp res2sion in CDM A system s[J].Infor m ation TechnologyJournal,2006(5):1098-1101.[4] 崔丽珍,杜普选.基于D SP的回波抵消技术[J].包头钢铁学院学报,2005,24(2):168-170. (C ui L izhen,D u Puxuan.R ealization of the echocancellation on D SP[J].Journal of B aotou U niversityof Iron and S teel Technology,2005,24(2):168-170.)[5] L otfizad M,Yazdi H S.M odified cli pped LM S algo2rithm[J].EU RA S IP Journal on A pp lied S ignal Pro2cessing,2005(8):1229-1234.[6] M ohamm ad T I,Zainol A A R.M I2NLM S adap tivebeam for m ing algorithm for sm art antenna system ap2p lications[J].Journal of Zhejiang U niversity SC I2EN C E A,2006,7(10):1709-1716.[7] J ing Q ingfeng,G uo Q ing.A dap tive com pensatingm ethod for dopp ler frequency shift using LM S andphase esti m ation[J].Journal of System s Engineeringand E lectronics,2009(5):913-919.[8] Yang Yuanxi,G ao W eiguang.A new learning statisticfor adap tive filter based on p redicted residuals[J].P rogress in N atural S cience,2006(8):833-837. [9] 刘明春,李国金.自适应频域块LM S算法在抵消干扰方面的研究[J].世界科技研究与发展,2009(1):57-58. (L iu M ingchun,L i G uojin.A dap tive frequency blockLM S algorithm research in aspect of interference can2cellation[J].W orld S ci2tech R&D,2009(1):57-58.)[10]L iu Peng,A n J ianp ing.W avelet packet dom ain LM Sbased m ulti2user detection[J].Journal of B ejing In2stitute of Technology,2008(4):484-488.[11]L i B o,Ge J ianhua,A i B o.R obust pow er am p lifierp redistorter by using m em eory polynom ials[J].Jour2nal of System s Engineering and Electronics,2009,20(4):700-705.[12]S un J ianm in,S hu G equn.A dap tive controller for ve2hicle active suspension generated through LM S filteralgorithm s[J].Transactions of Tianjin U niversity,2006(3):163-168.[13]X u Yuanjun,Tao R an,W ang Yue,et al.U sing LM SA dap tive filter in direct w ave cancellation[J].Jour2nal of B eijing Institute of Technology,2003(4):425-427.[14]蒙俊甫,侯祥博.LM S自适应滤波器的仿真与实现[J].电子元器件应用,2009,11(9):67-73. (M eng Junfu,H ou X iangbo.The si m ulation and real2 ization of LM S adap tive filter[J].Electronic C om2ponent&D evice A pp lications,2009,11(9):67-73.)[15]戴敬,王超.基于FPGA多级分布式算法的F I R数字滤波器的设计[J].沈阳建筑大学学报:自然科学版,2010,1:196-200. (D ai J ing,W ang C hao.The design of m ulti2channelsdistributed arithm etic algorithm FIR filter based onFPGA[J].Journal of S henyang J ianzhu U niversity:N atural S cience,2010,26(1):196-200.)。
自适应滤波器原理自适应滤波器是一种能够根据输入信号的特性自动调整滤波参数的滤波器,它可以有效地抑制噪声,提高信号的质量。
自适应滤波器的原理主要基于信号处理和自适应算法,下面将详细介绍自适应滤波器的原理及其应用。
首先,自适应滤波器的原理基于信号处理领域中的自适应滤波理论,它利用信号的统计特性和自适应算法来实现滤波器参数的自动调整。
自适应滤波器通常采用LMS(最小均方)算法或RLS(递归最小二乘)算法来实现参数的自适应调整,以适应不断变化的信号特性。
其次,自适应滤波器的原理是基于信号的统计特性进行参数调整。
它通过不断地观测输入信号的统计特性,比如均值、方差等,然后根据这些统计特性来调整滤波器的参数,以实现对信号的有效滤波。
这种基于统计特性的自适应调整能够使滤波器更加灵活地适应信号的变化,从而提高滤波效果。
另外,自适应滤波器的原理还涉及到自适应算法的应用。
自适应算法是一种能够根据输入信号的变化自动调整参数的算法,它可以实现对滤波器参数的在线更新,从而实现对信号的实时滤波。
常见的自适应算法包括LMS算法和RLS算法,它们能够根据输入信号的变化实时调整滤波器参数,以实现对不断变化的信号的有效滤波。
最后,自适应滤波器的原理还涉及到滤波器的应用。
自适应滤波器广泛应用于通信、雷达、声音处理等领域,它能够有效地抑制噪声,提高信号的质量。
在通信系统中,自适应滤波器能够提高信号的抗干扰能力,提高通信质量;在雷达系统中,自适应滤波器能够抑制地面杂波和干扰信号,提高雷达的探测性能;在声音处理领域,自适应滤波器能够降低环境噪声,提高语音的清晰度。
综上所述,自适应滤波器是一种能够根据输入信号的特性自动调整滤波参数的滤波器,它基于信号的统计特性和自适应算法,能够有效地抑制噪声,提高信号的质量。
自适应滤波器的原理和应用对于提高信号处理系统的性能具有重要意义,有着广泛的应用前景。
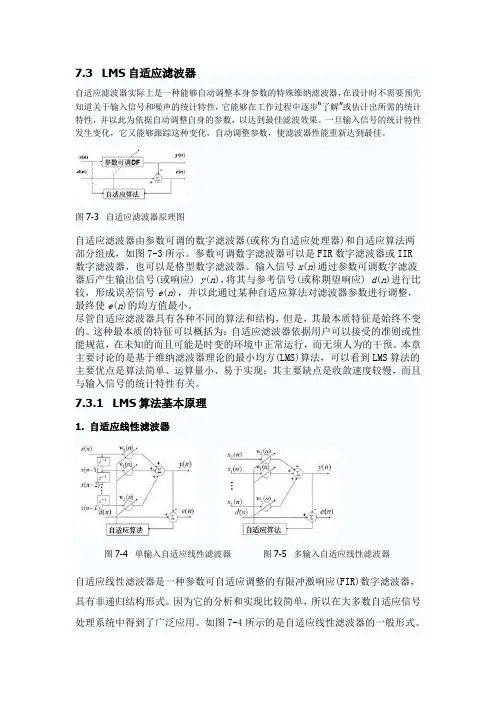
7.3 LMS自适应滤波器自适应滤波器实际上是一种能够自动调整本身参数的特殊维纳滤波器,在设计时不需要预先知道关于输入信号和噪声的统计特性,它能够在工作过程中逐步“了解”或估计出所需的统计特性,并以此为依据自动调整自身的参数,以达到最佳滤波效果。
一旦输入信号的统计特性发生变化,它又能够跟踪这种变化,自动调整参数,使滤波器性能重新达到最佳。
图7-3 自适应滤波器原理图自适应滤波器由参数可调的数字滤波器(或称为自适应处理器)和自适应算法两部分组成,如图7-3所示。
参数可调数字滤波器可以是FIR数字滤波器或IIR数字滤波器,也可以是格型数字滤波器。
输入信号x(n)通过参数可调数字滤波器后产生输出信号(或响应) y(n),将其与参考信号(或称期望响应) d(n)进行比较,形成误差信号e(n),并以此通过某种自适应算法对滤波器参数进行调整,最终使e(n)的均方值最小。
尽管自适应滤波器具有各种不同的算法和结构,但是,其最本质特征是始终不变的。
这种最本质的特征可以概括为:自适应滤波器依据用户可以接受的准则或性能规范,在未知的而且可能是时变的环境中正常运行,而无须人为的干预。
本章主要讨论的是基于维纳滤波器理论的最小均方(LMS)算法,可以看到LMS算法的主要优点是算法简单、运算量小、易于实现;其主要缺点是收敛速度较慢,而且与输入信号的统计特性有关。
7.3.1 LMS算法基本原理1. 自适应线性滤波器图7-4 单输入自适应线性滤波器图7-5 多输入自适应线性滤波器自适应线性滤波器是一种参数可自适应调整的有限冲激响应(FIR)数字滤波器,具有非递归结构形式。
因为它的分析和实现比较简单,所以在大多数自适应信号处理系统中得到了广泛应用。
如图7-4所示的是自适应线性滤波器的一般形式。
输入信号矢量x(n)的L+1个元素,既可以通过在同一时刻对L+1个不同信号源取样得到,也可以通过对同一信号源在n以前L+1个时刻取样得到。
前者称为多输入情况,如图7-5所示,后者称为单输入情况如图7-4所示,这两种情况下输入信号矢量都用x(n)表示,但应注意它们有如下区别。
⾃适应滤波:最⼩均⽅误差滤波器(LMS、NLMS)作者:桂。
时间:2017-04-02 08:08:31链接:声明:欢迎被转载,不过记得注明出处哦~【读书笔记08】前⾔西蒙.赫⾦的《⾃适应滤波器原理》第四版第五、六章:最⼩均⽅⾃适应滤波器(LMS,Least Mean Square)以及归⼀化最⼩均⽅⾃适应滤波器(NLMS,Normalized Least Mean Square)。
全⽂包括: 1)LMS与维纳滤波器(Wiener Filter)的区别; 2)LMS原理及推导; 3)NLMS推导; 4)应⽤实例;内容为⾃⼰的读书记录,其中错误之处,还请各位帮忙指出!⼀、LMS与维纳滤波器(Wiener Filter)的区别这⾥介绍的LMS/NLMS,通常逐点处理,对应思路是:随机梯度下降;对于Wiener Filter,给定准则函数J,随机/批量梯度都可以得出最优解;LMS虽然基于梯度下降,但准则仅仅是统计意义且通常引⼊误差,可以定义为J_0,简⽽⾔之J通常不等于J_0,得出的最优解w_o⾃然也通常不等于维纳最优解;分析LMS通常会分析稳定性,稳定性是基于Wiener解,。
但LMS是Wiener解的近似,所以:迭代步长的稳定性,严格适⽤于Wiener 解,对于LMS只是⼀种近似参考,并没有充分的理论依据。
下⽂的分析仍然随机梯度下降的思路进⾏。
⼆、LMS原理及推导LMS是时间换空间的应⽤,如果迭代步长过⼤,仍然有不收敛的问题;如果迭代步长过⼩,对于不平稳信号,还没有实现寻优就⼜引⼊了新的误差,屋漏偏逢连夜⾬!所以LMS系统是脆弱的,信号尽量平稳、哪怕短时平稳也凑合呢。
给出框图:关于随机梯度下降,可以。
这⾥直接给出定义式:利⽤梯度下降:- \nabla J = {\bf{x}}{\left( {{{\bf{w}}^T}{\bf{x}} - {d}} \right)^T}给出LMS算法步骤:1)给定\bf{w}(0),且1<\mu<1/\lambda_{max};2)计算输出值:y\left( k \right) = {\bf{w}}{\left( k \right)^T}{\bf{x}}\left( k \right);3)计算估计误差:e\left( k \right) = d\left( k \right) - y\left( k \right);4)权重更新:{\bf{w}}\left( {k + 1} \right) = {\bf{w}}\left( k \right) + \mu e\left( k \right){\bf{x}}\left( k \right)三、NLMS推导看到Normalized,与之联系的通常是约束条件,看到约束不免想起拉格朗⽇乘⼦。
NLMS算法相关非线性最小均方(NLMS)算法是一种常用于自适应滤波的算法。
它在信号处理、通信系统、机器学习等领域中广泛应用。
本文将从算法原理、性能优势以及应用场景等方面来详细介绍NLMS算法。
一、算法原理NLMS算法是通过不断调整滤波器权值来逼近系统的理想响应。
它的主要思想是利用回归滤波器的输出与期望响应之间的残差来更新权值。
具体而言,设期望响应为d(n),滤波器的权值为w(n),回归滤波器的输出为y(n),则NLMS算法的更新公式如下:w(n+1)=w(n)+μ*e(n)*x(n)其中,w(n+1)代表第n+1个采样时刻的权值,μ为步长参数,e(n)为残差,x(n)为输入信号。
残差通过以下公式计算:e(n)=d(n)-y(n)NLMS算法的核心思想是,通过不断更新权值,使残差最小化。
步长参数μ的选择会直接影响算法的收敛速度和稳定性。
较小的μ会使算法收敛速度变慢,但稳定性较好;较大的μ会使算法收敛速度加快,但可能导致震荡或不稳定性。
二、性能优势1.自适应性:NLMS算法能够根据环境的变化自动调整权值,适应不同输入信号和噪声环境。
2.实时性:由于算法简单,实时性较高,适用于实时信号处理应用。
3.良好的收敛速度:相较于传统的LMS算法,在均方误差相同的情况下,NLMS算法的收敛速度更快,能够更快地逼近系统的理想响应。
4.较低的稳态误差:NLMS算法在稳态时的均方误差较小,能够更好地抑制噪声干扰。
5.适应性增强:NLMS算法可以通过调整步长参数μ来平衡算法的收敛速度和稳定性,增强了算法的适应性。
三、应用场景1.自适应滤波:NLMS算法常用于自适应滤波器设计,能够根据环境的变化自动调整滤波器权值,对信号去噪、信号增强等起到良好的效果。
2.通信系统:在通信系统中,NLMS算法可以用于自适应均衡、自适应预编码等,从而提高系统对不同传输信道的适应能力。
3.机器学习:NLMS算法在支持向量机(SVM)等机器学习方法中也有应用,能够优化模型的拟合效果和预测准确性。

自适应滤波器毕业设计论文详解
一、自适应滤波器的原理
w(n+1)=w(n)+μ*e(n)*x(n)
其中,w(n)和w(n+1)分别表示迭代前后的权值,μ表示学习速率,
e(n)表示当前的误差,x(n)表示当前的输入信号。
二、自适应滤波器的算法
常用的自适应滤波器算法除了LMS算法外,还包括最小均方误差(MMSE)算法、递归最小二乘(RLS)算法等。
这些算法在不同的应用场
景下具有不同的优势,选择合适的算法可以提高自适应滤波器的性能。
LMS算法是最简单的自适应滤波器算法,其计算速度快,适用于实时
性要求较高的应用。
MMSE算法在噪声较大的情况下具有更好的性能,但
计算量较大。
RLS算法在滤波器的系数变化缓慢时表现出色,但对计算资
源要求较高。
三、自适应滤波器的应用
语音处理中常常会遇到噪声的干扰,这时可以利用自适应滤波器对语
音信号进行处理,去除噪声部分,提高语音信号的质量。
自适应滤波器能
够根据输入信号的特征,自动调整滤波器参数,提高去噪效果。
在语音通信、语音识别等领域,自适应滤波器的应用具有重要意义。
四、自适应滤波器的性能评价
此外,自适应滤波器的收敛速度和稳定性也是对性能评价的重要指标。
收敛速度越快,自适应滤波器的适应能力越强;稳定性好,滤波器的输出
信号越可靠。
结语
自适应滤波器在信号处理领域中具有重要的应用价值,能够根据输入信号的特征自动调整滤波器参数,提高处理效果。
本文详细介绍了自适应滤波器的原理、算法和应用领域,以及性能评价指标。
希望对读者了解和应用自适应滤波器有所帮助。
CO N T E N T改进的LMS算法——NLMS算法LMS算法原理两种算法性能分析总结LMS(最小均方误差)算法是基于梯度的算法,应用准则是均方误差函数(MSE )最小化原则,它在迭代运算中不断地调整滤波器权系数,直到MSE 达到最小值为止。
设计自适应滤波器的最常用的结构就是横向滤波器结构,输出信号y n 为:y n =w T n ∗x n = i=0N−1w i n x(n −i)N 为滤波器阶数,w T n 为权系数的转置。
FIR 自适应滤波器输出的形式可以看做是x n 与w n 两个矩阵的卷积,误差信号为参考输入信号与实际输出信号的差值e n =d n −y n =d n −w T n ∗x(n)1LMS算法的基本思想是利用e n与x(n)的某种关系,来不断更新自适应滤波器的权系数,从而使均方误差达到最小值,达到最优滤波效果。
均方误差J n为:J n=E e2n=E[d2n−2d n w T n∗x n+w T n∗x n2]通过对J n求导来得到使取得最小值的滤波器权系数,得到使代价函数最小的滤波器系数值:w=R−1∗P其中P=E d n∗x n为输入信号和参考信号的互相关矩阵R=E[x n∗x T n]为输入信号的自相关矩阵将均方误差E e2n对各w i矢量求导,获得均方误差梯度∇n为:∇n=ðE[e2(n)]ðw i⋮ðE[e2(n)]ðw n1设w n +1表示n +1时刻的滤波器系数权矢量,根据最陡下降法,滤波器权系数递归迭代公式表示为:w n +1=w n +μx n ∗e(n)其中μ为自适应步长,用来控制滤波器算法收敛性和稳定性。
对于LMS 算法为了保证收敛,μ的取值范围为:0<μ<2λmax输入信号为加了高斯噪声后的随机信号,取μ=1,α=0.001,μ= 0.2得到两种算法的误差曲线如下图所示:下降曲线的斜率反应了算法的收敛速度,稳定后的误差反映了算法的精度。
自适应滤波器原理及matlab仿真应用自适应滤波器原理及MATLAB仿真应用一、引言自适应滤波器是一种能够自动调整参数以适应环境变化的滤波器。
它能够根据输入信号的特性和所需滤波效果,动态地调整滤波器的参数,从而实现对信号的优化处理。
自适应滤波器在许多领域都有广泛的应用,如通信系统、图像处理、声音处理等。
本文将介绍自适应滤波器的工作原理,并通过MATLAB仿真展示其在实际应用中的效果。
二、自适应滤波器原理自适应滤波器的核心思想是根据输入信号的统计特性以及期望输出信号的特性,通过调整滤波器的权值参数,使得滤波器输出信号尽可能接近期望输出信号。
其基本原理可以概括为以下几个步骤:1. 初始化滤波器的权值参数,一般可以设置为0或者随机值。
2. 输入信号通过滤波器后得到输出信号。
3. 根据输出信号与期望输出信号之间的误差,调整滤波器的权值参数。
4. 重复步骤2和步骤3,直到滤波器输出信号达到期望输出信号的要求。
自适应滤波器的关键在于如何调整滤波器的权值参数。
常用的调整算法有最小均方误差(LMS)算法、最小误差平方和(RLS)算法等。
这些算法通过不断迭代,逐渐调整权值参数,使得滤波器的输出信号与期望输出信号之间的误差逐渐减小,从而达到滤波的目的。
三、MATLAB仿真应用MATLAB是一种功能强大的数学计算和仿真软件,广泛应用于各个科学领域。
在自适应滤波器的仿真中,MATLAB提供了许多有用的函数和工具箱,可以方便地进行滤波器参数的计算和调整。
我们需要定义输入信号和期望输出信号。
可以使用MATLAB中的随机函数生成一组随机信号作为输入信号,然后根据需求定义期望输出信号。
在实际应用中,期望输出信号可以是某种理想信号或者已知的参考信号。
接下来,我们可以使用MATLAB中的自适应滤波器函数对输入信号进行滤波处理。
MATLAB提供了adapthfilt函数和nlms函数等用于自适应滤波的函数,可以根据需求选择合适的函数进行滤波处理。
在Matlab中实现自适应滤波算法的实践指南引言:自适应滤波算法是一种重要的信号处理技术,在许多领域都得到了广泛的应用。
它通过实时调整滤波器参数来适应信号的变化,从而提高信号去噪和信号恢复的效果。
本文将介绍如何使用Matlab实现自适应滤波算法,并给出一些实践指导。
一、自适应滤波的原理自适应滤波算法的核心思想是根据信号的统计特性来调整滤波器的参数。
常见的自适应滤波算法包括LMS(最小均方)算法和RLS(递推最小二乘)算法。
LMS算法通过不断地调整滤波器的权值来使预测误差最小化;RLS算法则通过递推最小化滤波器的误差代价函数来更新权值。
这两种算法都可以实现自适应滤波的目的,但是在不同的应用场景中可能有差异。
二、Matlab中的自适应滤波函数在Matlab中,提供了一些方便实现自适应滤波算法的函数。
其中最常用的是`nlms`函数和`rls`函数。
`nlms`函数实现了LMS算法,可以用于实时的自适应滤波;`rls`函数实现了RLS算法,适用于更复杂的信号恢复任务。
三、使用`nlms`函数实现自适应滤波下面以一个简单的例子来说明如何使用`nlms`函数实现自适应滤波。
假设我们有一个带噪声的正弦信号,我们可以通过自适应滤波来去除噪声。
首先,我们生成一个1000个采样点的正弦信号,并添加高斯白噪声。
```matlabt = 0:0.1:100;x = sin(t);noise = 0.5*randn(size(t));y = x + noise;```接下来,我们使用`nlms`函数进行自适应滤波。
首先,我们需要初始化滤波器权重。
通常可以将初始权重设置为0或者一个很小的值。
然后,我们使用一个循环来逐步更新滤波器权重,直到达到滤波的要求。
```matlaborder = 10; % 滤波器阶数mu = 0.1; % 步长参数w = zeros(order+1, 1); % 初始化滤波器权重for i = order+1:length(y)input = y(i:-1:i-order); % 输入信号output = input' * w; % 滤波输出error = x(i) - output; % 预测误差w = w + mu * input * error; % 权重更新end```最后,我们可以将滤波器的输出与原始信号进行对比,评估滤波效果。
自适应滤波技术的研究及应用随着技术的不断发展,各个领域都对信号处理技术的需求越来越高。
在目前的信号处理中,自适应滤波技术已经成为一个热门的课题。
接下来,我们将会探讨自适应滤波技术的基础概念、算法原理以及其应用场景。
一、自适应滤波技术的基础概念自适应滤波技术可以在信号处理中实现对信号的滤波去噪等功能。
相比传统的滤波技术,自适应滤波技术拥有更高的滤波精度,不仅可以减少噪声、去除干扰,还可以有效地提取出信号中的有用信息。
这种技术在无线通信、雷达信号处理、图像处理和生物医学工程等领域中广泛应用。
自适应滤波技术的核心是在滤波过程中根据自身输入的反馈信息不断地调整滤波器的参数,并且能够根据不同的输入环境和情况对相应的滤波器进行选择和配置。
这种“自我调节”和“适应性选择”的特性使得自适应滤波器可以有效地解决传统滤波器在复杂环境下效果不佳的问题。
二、自适应滤波技术的算法原理自适应滤波技术的核心在于参数调整,而这种调整可以通过相应算法实现。
常用的自适应滤波算法有LMS算法(最小均方差算法)、RLS算法(递归最小二乘算法)和NLMS算法(归一化最小均方差算法)等。
LMS算法是最常见和最易于实现的自适应滤波算法之一。
该算法的原理是通过不断地调整滤波器参数来最小化输入信号和输出信号之间的误差,从而得到更加精确的输出信号。
在算法中,每当输入信号发生变化时,都会对滤波器的权值进行一次更新,更新的大小由步长参数决定。
RLS算法是一种相对于LMS算法而言更加复杂的自适应滤波算法。
该算法的基础原理是利用递归式的算法计算出最小二乘解,并且在计算过程中可以根据输入信号的变化自适应地调整算法参数。
NLMS算法是一种在LMS算法的基础上加入归一化处理的改进算法。
该算法采用归一化因子来对权值进行调整,从而能够有效地解决在LMS算法中由于输入信号大小的不同而产生的滤波精度不稳定等问题。
三、自适应滤波技术的应用场景自适应滤波技术广泛应用于信号处理领域的各个方面。