多源遥感影像配准流程
- 格式:docx
- 大小:232.04 KB
- 文档页数:5
1.实习目的:遥感图像的配准2.实习内容:2.1掌握ENVI自定义坐标,以及基于地形图的遥感影像配准过程。
2.2本次实习中带有地理坐标的西安市城区地形图被用作基准影像,对资源三号全色影像进行配准。
在此基础上,以纠正后的全色影像为基准,校正资源三号多光谱影像,用于下节的图像融合。
3.实习步骤:3.1 基于地形图配准全色影像的具体操作步骤:3.1.1 打开并显示资源三号全色影像与地形图1)从ENVI主菜单中,选择File → Open Image File。
加载地形图文件和全色影像到可用波段列表Available Bands List中;2)点击Load RGB将地形图加载到显示窗口display#1;3)在可用波段列表Display #1下拉菜单,点击New Display按钮,并从下拉式菜单中选择New Display。
点Load RGB按钮,将全色影像加载到一个新的显示窗口display#2。
3.1.2 修改地形图头文件中的地图信息由于地形图为西安80坐标系,而ENVI系统自带的投影文件中并没有相关基准面和椭球体,因此打开的地形图无法正确显示地图信息Map Info;1)定义椭球体,进入ENVI安装目录:C:\Program Files\ITT\IDL71\products\envi47\ map_proj,打开椭球体文件ellipse.txt,在最后一行增加IAG-75,6378140.0, 6356755.3;2)定义基准面,在相同的目录,打开基准面文件datum.txt文件,在最后一行增加D_Xian_80,IAG-75,0,0,0;3)在可用波段列表中,右键点击地形图文件,选择Edit Header,从弹出的窗口的EditAttributes的下拉箭头中选择Map Info,进入Edit Map Information。
输入图像左上角XY 坐标与像素大小;选择Change Proj,新建投影,输入相关参数3.1.3影像配准1)从ENVI主菜单栏中,选择Map → Registration → Select GCPs: Image to Image;2)在Image to Image Registration对话框中,点击并选择Display #1 (地形图),作为BaseImage。
多源遥感影像综合应用的一项重要的准备工作就是影像间的配准,特别是不同类型传感器在同一地区,不同时间,不同高度获取的影像间的配准。
即运用一幅纠正过的带有地理信息的影像(主影像)与一幅未纠正的影像(从影像)进行配准,获取一系列同名点位。
因为主影像是正射影像,因而这些同名点是具有大地坐标的同名点。
同时这些同名点可以作为参考数据(保存在配准后生成的<从影像名>.ctp 文件中)用于对其他影像进行纠正。
在ArcMap中配准影像栅格数据可以通过扫描地图、航片及卫片来获取。
扫描的地图通常不包含表明影像对应于地表何处的信息。
从航空相片和卫星相片上获得的位置信息往往不适合执行分析,或者与其它数据对齐显示。
与其它空间数据一起使用栅格数据,需要把栅格数据对齐或配准到地图的坐标系统。
配准栅格数据定义了它的地图坐标位置,即指定了联系数据与地球上的位置的坐标系统。
配准栅格数据使它能与其它地理数据一起被查看、查询和分析。
配准流程:1、启动ARCGIS9,用键或者在图层处点右键添加数据,将所要的图象数据添加近来。
如图所示:2、从“视图”→“工具条”→“影象配准”将影像配准的工具条调出来,如图,,调出工具条如下,选择图的四个角的格网点进行配准处理,首先是左上角,如图:使用“添加控制点”按钮添加第一个控制点,如图:将左下角格网点放大以准确定位,如图。
点右键,输入XY坐标,根据地图格网坐标输入,完成一个点,再按相同方法对其他三个角点配准。
4、电击查看连接表可以查看配准后的坐标残差看是否符合要求。
点击地理参考下的矫正,双线性内插,保存矫正图象。
5、将矫正后图象添加到图层覆盖矫正前的,从视图下拉菜单选择数据框属性打开后如下:将地图单位改为米,将坐标系统设为西安1980,之后确定完成设置。
保存完成配准。
1.实验目的(1)初步了解图像配准的基本流程,包括base的选取和控制点的选取,实现对两组图像进行配准,给出图像配准误差。
(2)掌握ENVI软件的基本操作方法,确保能够使用ENVI软件完成图像配准实验。
(3)理解和巩固理论知识,明确图像配准的意义,掌握动手实践操作能力,提高综合分析问题的能力。
2.实验原理2.1 几何校正与图像配准几何校正必须在遥感图像信息提取之前进行。
只有把所提取的图像信息表达在一个规定的空间投影参照系统中,才能进行图像的几何测量、相互比较以及图像叠加分析。
几何精校正是利用地面控制点进行的几何校正。
它是用一种数学模型来近似描述遥感图像的几何畸变过程,并利用畸变的遥感图像与标准地图之间的一些对应点(即控制点数据对)求得这个几何畸变模型,然后利用此模型进行几何畸变的校正。
图像配准是相对于一个参考图像而言,利用畸变的遥感图像与一个参考图像之间的控制点来求得几何畸变模型,然后采取像素坐标变换来得到修正之后的图像。
它是图与图之间的一种几何关系。
图像配准的流程如下:(1)输入原始数字图像(2)确定工作范围(3)选择特征点(4)匹配同名点与像元位值(5)选择纠正函数和相关参数(6)重采样(7)输出配准后的图像2.2 地面控制点的选取地面控制点是几何纠正中用来建立纠正方程的基础。
(1) 控制点数目和分布控制点数目的最小值按未知系数多少来确定。
k 阶多项式方程控制点的最小数目为(k+1)(k+2)/2,在条件允许的情况下。
控制点要均匀分在工作地区。
(2) 图像中控制点的确定在图像上,控制点应该在容易分辨、相对稳定、特征明显的位置。
在变化不明显的大面积区域,控制点可以少一些。
(3) 地面控制点坐标的确定地面控制点坐标可以通过地形图或现场实测获取。
2.3 多项式纠正方程通过多项式函数描述地面控制点在待校正图像上的图像坐标(x,y )与其真实地理坐标(X,Y )的映射关系。
对于简单的旋转、偏移和缩放变形,可以使用最基本的仿射变换公式进行纠正:012012x a a X a Yy b b X b Y=++=++ (2-1)复杂的变形可以使用3阶多项式纠正方程:22322301234567892232230123456789()()()()()()x a a X a Y a X a XY a Y a X a X Y a XY a Y y b b X b Y b X b XY b Y b X b X Y b XY b Y =+++++++++=+++++++++(2-2)式中:x 、y 为像素的图像坐标,从待校正图像上获取 ;X 、Y 为地面(或地图)真实地理坐标,可通过野外调查、地形图或参考图像获取;ai 、bi 为多项式系数。
测绘技术中的遥感图像纠正和融合方法遥感图像的纠正和融合是测绘技术中的重要研究方向,具有广泛的应用价值。
本文将从遥感图像纠正和融合两个方面进行探讨,并介绍一些常见的方法和技术。
一、遥感图像的纠正方法1. 几何纠正几何纠正是指对遥感图像进行几何校正,使其与地理坐标系统相匹配。
常见的几何纠正方法包括地面控制点法和数字影像匹配法。
地面控制点法通过在图像上选择地物特征点,并与地面真实位置相对应,根据图像上的点与地面真值的差异进行几何变换,从而实现图像的几何纠正。
数字影像匹配法则是通过提取图像上的特征点,并与实际地面上的同名特征点进行匹配,然后根据匹配结果进行几何变换。
2. 辐射纠正辐射纠正是指对遥感图像进行辐射校正,消除光学、大气等因素对图像亮度和对比度的影响,使得图像能够真实反映地物的辐射特性。
常见的辐射纠正方法包括大气校正和辐射定标。
大气校正是通过模拟大气传输过程,根据测量的气象数据和大气传输模型,估算和减去大气散射和吸收对遥感图像的影响。
辐射定标则是通过将图像上的数字值转换为辐射度或反射率,以实现不同时间、不同传感器之间的数据比较和分析。
二、遥感图像的融合方法遥感图像融合是指将多个传感器获取的多源数据融合到一个整体图像中,以提供更全面、更准确的地物信息。
常见的遥感图像融合方法包括像素级融合和特征级融合。
1. 像素级融合像素级融合是通过将不同传感器获取的图像像素进行组合,生成具有更高分辨率、更丰富信息的图像。
常用的像素级融合方法包括加权平均法、主成分分析法和小波变换法。
加权平均法将不同传感器的图像按一定权重加权平均,得到融合后的图像。
主成分分析法是利用主成分分析对不同传感器的图像进行降维处理,然后通过反变换重构融合图像。
小波变换法则是利用小波变换对不同传感器的图像进行多尺度分解和重构,得到融合图像。
2. 特征级融合特征级融合是利用不同传感器获取的图像中的特征信息进行融合,提取和组合更全面、更准确的地物特征。
遥感影像配准方法一、引言遥感影像配准是指将多幅遥感影像通过一定的处理方法,使得它们在空间上或者光谱上相对准确地对应起来。
遥感影像配准是遥感技术中的重要环节,对于提取地物信息、监测变化、制作地图等应用具有重要意义。
本文将介绍几种常见的遥感影像配准方法。
二、特征点匹配法特征点匹配法是一种常用的遥感影像配准方法。
该方法通过提取影像中的特征点,并在不同影像中寻找相似的特征点,然后利用这些匹配的特征点进行配准。
特征点可以是角点、边缘点、纹理点等。
特征点匹配法具有计算速度快、适用范围广的优点,但对于光照、旋转、尺度变化等情况下的影像配准效果较差。
三、控制点法控制点法是一种基于已知控制点坐标的遥感影像配准方法。
该方法首先在待配准影像和参考影像中选择一些具有明显地物特征且位置准确的控制点,然后通过计算这些控制点在两幅影像中的坐标差异,从而得到待配准影像相对于参考影像的变换关系。
控制点法配准精度较高,适用于各种变换情况下的影像配准,但需要事先获取准确的控制点坐标。
四、基于图像匹配的配准方法基于图像匹配的配准方法是利用图像间的相似度进行配准的方法,常用的图像匹配算法包括相位相关法、归一化互相关法、互信息法等。
这些方法通过计算两幅影像之间的相似度,找到最佳的配准变换参数,从而实现影像的配准。
基于图像匹配的配准方法不依赖于特征点或控制点,适用于各种复杂变换情况下的影像配准,但计算量较大,需要较长的处理时间。
五、影像配准的精度评定影像配准的精度评定是判断配准效果好坏的重要指标。
常用的精度评定方法包括重叠区域比较法、控制点坐标差比较法、变换参数比较法等。
通过对配准后的影像与参考影像进行对比,计算它们之间的差异,可以评估配准的精度。
影像配准的精度评定对于验证配准方法的可靠性、优化配准参数具有重要意义。
六、总结遥感影像配准是遥感技术中的重要环节,常用的配准方法包括特征点匹配法、控制点法和基于图像匹配的配准方法。
这些方法各有优缺点,适用于不同的配准需求。
第1篇一、实验背景随着遥感技术的发展,遥感影像在资源调查、环境监测、城市规划等领域发挥着越来越重要的作用。
然而,由于遥感传感器类型、观测时间、观测角度等因素的限制,同一地区获取的遥感影像往往存在光谱、空间分辨率不一致等问题。
为了充分利用这些多源遥感影像数据,提高遥感信息提取的准确性和可靠性,遥感影像融合技术应运而生。
遥感影像融合是将不同传感器、不同时间、不同分辨率的多源遥感影像进行综合处理,以获得对该区域更为准确、全面、可靠的影像描述。
本文通过实验验证了遥感影像融合技术在提高遥感信息提取准确性和可靠性方面的作用。
二、实验目的1. 了解遥感影像融合的基本原理和方法;2. 掌握常用遥感影像融合算法;3. 通过实验验证遥感影像融合技术在提高遥感信息提取准确性和可靠性方面的作用。
三、实验原理遥感影像融合的基本原理是将多源遥感影像数据进行配准、转换和融合,以获得具有更高空间分辨率、更丰富光谱信息的融合影像。
具体步骤如下:1. 影像配准:将不同源遥感影像进行空间配准,使其在同一坐标系下;2. 影像转换:将不同传感器、不同时间、不同分辨率的遥感影像转换为同一分辨率、同一波段的影像;3. 影像融合:采用一定的融合算法,将转换后的多源遥感影像数据进行融合,生成具有更高空间分辨率、更丰富光谱信息的融合影像。
四、实验方法1. 实验数据:选取我国某地区的高分辨率多光谱遥感影像和全色遥感影像作为实验数据;2. 融合算法:选用Brovey变换、主成分分析(PCA)和归一化植被指数(NDVI)三种常用遥感影像融合算法进行实验;3. 融合效果评价:采用对比分析、相关系数、信息熵等指标对融合效果进行评价。
五、实验步骤1. 数据预处理:对实验数据进行辐射校正、大气校正等预处理;2. 影像配准:采用双线性插值法对多光谱影像和全色影像进行配准;3. 影像转换:对多光谱影像进行波段合成,得到与全色影像相同分辨率的影像;4. 影像融合:分别采用Brovey变换、PCA和NDVI三种算法对转换后的多源遥感影像数据进行融合;5. 融合效果评价:对比分析三种融合算法的融合效果,并采用相关系数、信息熵等指标进行定量评价。
多源遥感图像中的图像配准方法宋 芳1,李 勇2,陈 勇11.装备指挥技术学院重点实验室,北京 101416;2.浙江师范大学信息光学研究所,浙江,杭州 321004提要:提出了多源遥感图像配准融合的流程,分析了图像配准的过程。
介绍了几种遥感图像的图像配准方法,对几种配准方法的效果进行了讨论。
关键词:影像配准;信息融合;图像增强中图分类号:TP751 文献标识码:A 文章编号:0253-2743(2008)03-0026-02Match methods for multisensor remote sensing im age registrationS ONG Fang 1,LI -Y ong 2,CHE N -Y ong 11.The Academy of Equipment C ommand &T echnology ,Beijing 101416,China ;2.Institute of In formation Optics ,Zhejiang N ormal University ,Hangzhou 321004,ChinaAbstract :The article introduced a match framew ork of Multiscns or Rem ote Sensing.The author particularly studied every process.This paper introduced sev 2eral image match methods of Multisens or Rem ote Sensing data ,and author performed a discussion on the relationship between several.K ey w ords :image match ,in formation fusion ,image enhancement收稿日期:2008-01-16 在图像处理前,必须保证两幅图像的相关性,减小干涉相位误差。
遥感图像几何校正(较易)遥感图像几何校正是将采集的遥感图像与地球参考系统(如地理坐标系统或投影坐标系统)进行对齐,以保证图像上的地物位置与实际地理位置一致。
下面是一个较易的遥感图像几何校正步骤示例:1. 获取控制点:首先选择一些在图像上可见且在地面上已知坐标的控制点。
这些控制点可以是人工设置的地物特征,如标志物、房屋角点等,也可以是已知坐标的地理要素,如GPS测点、地面地物等。
2. 图像配准:通过图像配准软件,在原始图像上标记出控制点的位置,并将其与其在地面上的真实坐标相匹配。
配准软件会根据这些控制点来计算出图像的几何变换参数,如旋转、平移和缩放等。
13. 几何变换:根据图像的几何变换参数,对整个图像进行几何校正。
几何变换方法可以是线性的或非线性的,其中包括了常用的平移、旋转、缩放和仿射变换等。
4. 像素重采样:在完成几何校正后,由于图像上的像素点分辨率可能与原始图像不同,因此需要对图像进行重采样,以保证图像的细节精度和质量。
重采样方法有最邻近插值、双线性插值和双三次插值等,根据实际情况选择合适的方法。
5. 边缘裁剪:在完成像素重采样后,由于几何校正和重采样的处理可能会导致图像边缘的变形,需要对图像进行边缘裁剪,以去除边缘的不确定区域。
6. 输出校正后的图像:完成校正后的图像即可输出,用于后续的遥感分析和应用。
2需要注意的是,以上是一个较为简单的遥感图像几何校正流程,具体步骤和方法会因不同的图像类型、几何变换需求和软件工具的选择而有所不同。
在实际应用中,还需要考虑更多因素,如地面控制点的选择和精度要求、辅助数据的使用等。
3。
一种利用点特征和互信息的多源遥感影像配准方法周浩;叶沅鑫;王蕾【摘要】针对多源遥感影像间几何形变和辐射差异所引起的配准困难问题,该文提出一种利用点特征和互信息的影像配准方法。
该方法首先利用 Harris 算子,采用分块的提取策略,在参考影像上检测出大量、分布均匀的特征点,然后以互信息作为相似性,并采用双向匹配的策略在输入影像上进行同名点识别,同时进行粗差剔除,最后根据获取的同名点建立不规则三角网,对输入影像进行逐三角网纠正,最终实现影像的配准。
通过选择两种不同类型的多源遥感影像进行试验,结果表明该方法具有较强的适应性并且配准精度较高。
%In order to address the problem of the registration of multi-source remote sensing images with geometric distortions and intensity differences,this paper proposes a registration method using point features and mutual information for such images.The Harris detector is firstly applied to extract a large amount of evenly distributed feature points in the reference image using a block-based scheme.Then,mutual information is employed as the similarity metric to detect the correspondences using a bidirectional matching technique,and the correspondences with large errors areremoved.Finally,image registration is achieved through a piecewise linear transform,which constructs the triangulated irregular networks with the correspondences, and rectifies the input image on each triangle region one by one.The proposed method is evaluated with two different types of multi-source remote sensing images.The experimental results demonstratethat the proposed method is suitable for multi-source remote sensing images,and achieves high registration accuracy.【期刊名称】《遥感信息》【年(卷),期】2015(000)003【总页数】5页(P99-103)【关键词】多源遥感影像;影像配准;点特征;互信息;配准精度【作者】周浩;叶沅鑫;王蕾【作者单位】四川省遥感信息测绘院,成都 610100; 四川省应急测绘与防灾减灾工程技术研究中心,成都 610041;西南交通大学地球科学与环境工程学院,成都611756;四川省第三测绘工程院,成都 610500【正文语种】中文【中图分类】TP750 引言随着航空、航天技术不断的快速发展,现在遥感技术已经进入一个多传感器、多光谱、多分辨率和多时相的发展新阶段。
图像配准及多源图像融合技术研究一、图像配准技术介绍图像配准是指将两个或多个图像通过某种方法进行对齐,使得它们在空间位置上对应一致。
图像配准技术在医疗影像、遥感图像、地质探测等领域得到了广泛应用。
常见的图像配准方法包括基于特征点的配准、基于区域的配准、基于相位相关的配准等。
1.基于特征点的配准基于特征点的配准方法是指通过在图像中提取出关键点,并将其对应起来的方式进行图像配准的方法。
常见的特征点包括角点、边缘、斑点等。
该方法可以应对图像位置、形状、大小、光照等变化,因此具有较高的准确性和可靠性。
2.基于区域的配准基于区域的配准方法是指通过选择图像中相似的区域进行匹配的方法。
该方法可以较好地消除由于图像噪声、光照不均等产生的误差,但对于图像的变形较大时效果较差。
3.基于相位相关的配准基于相位相关的配准方法是指通过对两幅图像进行傅里叶变换后,进行相位相关计算的方法。
该方法可以较好地应对图像的位移、旋转等变化,因此被广泛应用于医学影像等领域。
二、多源图像融合技术介绍多源图像融合是指将多幅具有不同特征的图像融合成一幅新的图像。
多源图像融合技术可以提高图像的信息含量和品质,广泛应用于军事目标检测、环境监测、物体跟踪等领域。
常见的多源图像融合方法包括基于像素的融合、基于特征的融合、基于深度学习的融合等。
1.基于像素的融合基于像素的融合方法是指通过对多幅图像的像素进行加权平均、最大值、最小值等操作,得到一幅新的融合图像。
该方法简单易行,但缺乏对图像特征的有效提取,因此精度较低。
2.基于特征的融合基于特征的融合方法是指通过对各幅图像的不同特征进行提取,并进行特征融合的方法。
常见的特征包括颜色、边缘、纹理等。
该方法能够提取图像的细节信息,因此具有较高的融合精度。
3.基于深度学习的融合基于深度学习的融合方法是指通过使用卷积神经网络等深度学习模型对多个图像进行特征提取和融合的方法。
该方法具有较高的融合精度和泛化能力,但需要大量的图像数据和模型训练时间。
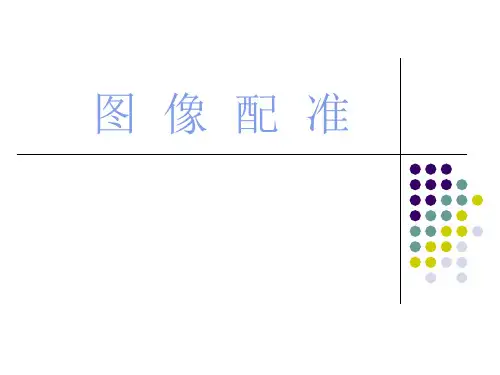
第一讲遥感影像预处理图像处理流程分为以下几个步骤:图像的配准、重采样、定标以及大气纠正。
其中,图像配准是做所有工作的前提,是图像的几何纠正。
在进行定性或者定量遥感时都要进行图像配准来确定我们所要研究的目标。
在进行完图像配准(几何纠正)之后,为了使得输出图像的配置与输入图像向对应,因此要进行重采样。
定标以及大气纠正则是进行辐射量纠正的重要的过程,是进行定量遥感不可少的步骤。
分类是图像处理的最后一步,按某种使用意图分类之后的图像,对实际应用有很大帮助。
图像预处理的流程一、影像配准配准:同一区域里一幅图像(基准图像)对另一幅图像的校准,以使两幅图像中的同名像元配准;图像纠正:借助于一组地面控制点,对一幅图像进行地理坐标的校正,也称为地理参照;目的: (1) 在定性应用遥感时,例如我们想动态监测湖泊形状和面积的变化,必须通过配准才能使图像之间具有可比性,从而达到我们的研究目的.(2) 在遥感的定量研究中,例如要反演所感兴趣地方的参数,也需要通过配准才能确定具体的目标.实际上,配准就是一种几何纠正由于搭载传感器的平台(如飞机,卫星)的姿态,速度等的不稳定,以及地球曲率,空气折射等的影响,形成的图像常有畸变,所以要进行几何纠正,我们常常通过配准实现(对于山区,可采用正射纠正)类型(1)把畸变图像往地形图上配(2)把畸变图像往底图上配(3)把畸变图图像相互之间配原理(一) 多项式纠正模型:(1)一次多项式Xw=a0+a1*Xb+a2*YbYw=b0+b1*Xb2*+bYb(2)二次多项式Xw=a0+a1*Xb+a2*Yb+a3*Xb^2+ a4*Yb^2+a5*Xb*YbYw=b0+b1*Xb+b2*Yb+b3*Xb^2+ b4*Yb^2+b5*Xb*Yb(3)三次多项式Xw=a0+a1*Xb+a2*Yb+a3*Xb^2+ a4*Yb^2+a5*Xb*Yb+a6*Xb^3+a7*Yb^3+a8*Xb^2*Yb+a9*Xb*Yb^2Yw=b0+b1*Xb+b2*Yb+b3*Xb^2+ b4*Yb^2+b5*Xb*Yb+b6*Xb^3+b7*Yb^3+b8*Xb^2*Yb+ b9*Xb*Yb^2求系数:通过寻找控制点(GCP)去求系数,有几个未知数就至少要几对控制点!一次至少要3对,二次至少要6对,三次至少要10对。
多源遥感图像配准技术综述汪汉云1,王 程1,李 鹏1,钱智明1,郝胜勇2(1. 国防科技大学电子科学与工程学院,长沙 410073;2. 航天恒星科技有限公司,北京 100086)摘 要:从成像光谱特性、成像分辨率和成像模式等方面对可见光、红外、高光谱和合成孔径雷达传感器的成像特点进行分析,根据一致性特征描述方法对多源遥感图像配准算法进行分类,指出多源遥感图像具有成像特性变化大、相关度小、匹配特征的空间分布不均匀等特点,其配准技术的关键在于提取不变的图像特征以及得到有效的匹配特征。
关键词:多源遥感图像;成像特点;一致性特征;图像配准;匹配特征Review of Multi-source Remote SensingImage Registration TechniquesWANG Han-yun 1, WANG Cheng 1, LI Peng 1, QIAN Zhi-ming 1, HAO Sheng-yong 2(1. College of Electronic Science and Engineering, National University of Defense Technology, Changsha 410073, China;2. Space Star Technology Co., Ltd., Beijing 100086, China)【Abstract 】This paper analyzes the imaging characteristics of sensors including visible, infra-red, hyperspectral and Synthetic Aperture Radar(SAR) from aspects of imaging spectral properties, imaging resolution to imaging modality. The algorithms for multi-source remote sensing image registration are classified by consistent features. It gives conclusions that multi-source remote sensing images have properties of various imaging properties, low correlations and matching features distributed nonuniformity spatially. The key of multi-source remote sensing image registration lies in extracting stable image features and getting suitable matching features.【Key words 】multi-source remote sensing image; imaging characteristic; consistency feature; image registration; matching feature DOI: 10.3969/j.issn.1000-3428.2011.19.005计 算 机 工 程 Computer Engineering 第37卷 第19期V ol.37 No.19 2011年10月October 2011·专栏· 文章编号:1000—3428(2011)19—0017—05文献标识码:A中图分类号:TN911.731 概述遥感图像配准技术是近年来发展迅速的遥感图像处理技术之一。
遥感图像拼接步骤期末总结一、遥感图像拼接的步骤1. 遥感影像的获取与预处理在进行遥感图像拼接之前,首先需要获取原始遥感影像数据。
遥感影像可以是航空摄影图像、卫星遥感影像等,需要通过遥感平台或者数据提供商购买或下载相应的影像数据。
然后对原始影像进行预处理,包括校正、配准、辐射定标等。
校正可以提高影像的几何精度,配准则是将不同影像的坐标系统一化,辐射定标则是将影像的光谱信息校正为物理量。
2. 影像拼接区域的选择在进行影像拼接之前,需要确定拼接的区域。
可以根据实际应用需求来选择,比如选择特定的地理区域,或者选择两幅影像的重叠区域等。
选择合适的拼接区域可以提高拼接的精度和效果。
3. 影像拼接的几何校正影像拼接的几何校正是指将不同影像的几何特征进行统一化,保证影像之间的几何一致性。
常见的几何校正方法包括刚性变换、仿射变换和投影变换等。
几何校正可以通过地面控制点、SIFT特征匹配等手段进行。
其中,地面控制点是利用地面上已知的点(如地物边界)与影像中的对应点进行匹配,从而估算出影像之间的几何变换参数。
4. 影像拼接的光谱校正影像拼接的光谱校正是指将不同影像的光谱信息进行统一化,保证影像之间的光谱一致性。
光谱校正可以通过直方图匹配、灰度拉伸等方法进行。
直方图匹配是将一幅影像的像素值分布调整为另一幅影像的像素值分布,从而实现光谱校正。
5. 影像拼接的融合算法影像拼接的融合算法是指将不同影像的像素进行融合,生成拼接后的影像。
常见的融合算法包括简单平均法、加权平均法、多尺度变换等。
简单平均法是将不同影像的像素值进行简单平均,加权平均法则是根据不同影像的重要性进行加权平均。
多尺度变换则是通过将影像进行分解和重建来实现融合。
二、关键技术和常见问题1. 影像的配准影像的配准是影像拼接中的关键技术之一。
影像配准的准确度直接影响到拼接效果的质量。
常见的影像配准技术包括特征点匹配、区域匹配等。
特征点匹配是通过提取影像中的特征点(如SIFT特征点)来进行匹配,区域匹配则是利用影像中的区域来进行匹配。
多源遥感影像综合应用的一项重要的准备工作就是影像间的配准,特别是不同类型传感器在
同一地区,不同时间,不同高度获取的影像间的配准。
即运用一幅纠正过的带有地理信息的影像
(主影像)与一幅未纠正的影像(从影像)进行配准,获取一系列同名点位。
因为主影像是正射影像,因而这些同名点是具有大地坐标的同名点。
同时这些同名点可以作为参考数据(保存在配准后生成的<从影像名>.ctp文件中)用于对其他影像进行纠正。
在ArcMap中配准影像栅格数据可以通过扫描地图、航片及卫片来获取。
扫描的地图通常不包含表明影
像对应于地表何处的信息。
从航空相片和卫星相片上获得的位置信息往往不适合执行分析,或者与其它数据对齐显示。
与其它空间数据一起使用栅格数据,需要把栅格数据对齐或配准到地图的坐标系统。
配准栅格数据定义了它的地图坐标位置,即指定了联系数据与地球上的位置的坐标系统。
配准栅格数据使它能与其它地理数据一起被查看、查询和分析。
配准流程:
1、启动ARCGIS9用三键或者
在图层处点右键添加数据,将
所要的图象数据
$新崖廻台■團层⑥
添加近来。
如图所示:
2、从“视图工具条影象配准”将影像配准的工具条调出来,如图,
调出工具条如下,
选择图的四个角的格网点进行配准处理,首先是左上角,如图:
使用“添加控制点”按钮添加第一个控制点,如图:
|地理参苕怎〕帯图层;(^41-48-36. tif
二|①〒” J回
[将左下角格网点放大以准确定位,如图。
点右键,输入XY坐标,根据地图格网坐标输入,
完成一个点,再按相同方法对其他三个角点配准。
4、电击查看连接表可以查看配准后的坐标残差看是否符合要求。
点击地理参考下的矫正,双线性内插,保存矫正图象
5、将矫正后图象添加到图层覆盖矫正前的,从视图下拉菜单选择数据框属性
打开后如下: 囹区I
范圉矩形
框架 1 大小和位置 光輕 格网 地團缓冲
地副迪:[ 显示⑥:【
|—甬奈 | 歐消 | 应用迦|
将地图单位改为米,将坐标系统设为西安
1980,
锻择一亍巻标系読;.
二I 收識夹
白一I 预定文
- 2j Uvogr^phic Ccordin^t* SyEtEtnm
+ _| Afriea
4] _| Antif sti SA
-_|
啡 A] n al Abd 1970
、薄* R* t *vi A (T *lc*r I s"l
参若比例⑨: 标注引擎閭:
数据框届性 名宇通:
描迷迴:
遶择一j ■■坐标丟统::
[± I _J kiistralia Zealand C I County Sjrs te(r«E 库 I "1 IinrnriP
之后确定完成设置
Sauth S ingap 电
艦 194S
'雲* T dkyo Tru«i al Uxwt 1948
保存完成配准。