三维激光扫描测量系统
- 格式:doc
- 大小:30.50 KB
- 文档页数:2
三维激光扫描测绘技术的基本原理与应用激光扫描测绘技术作为一种高效、高精度的测绘方法,得到了广泛的应用。
它利用激光传感器扫描目标物体表面,通过测量激光束的反射时间和强度信息,来获取目标物体的三维坐标数据。
本文将介绍三维激光扫描测绘技术的基本原理以及其应用领域。
首先,激光扫描测绘技术的基本原理是通过对目标物体进行激光扫描,探测激光束在空间中的三维坐标位置。
激光扫描系统由激光器、扫描仪和控制系统组成。
激光器发射的激光束被扫描仪控制进行扫描,然后反射回扫描仪并传回控制系统。
控制系统根据接收到的反射激光束的时间和强度信息,计算出目标物体的三维坐标数据。
激光扫描测绘技术的应用领域非常广泛。
在建筑行业中,三维激光扫描测绘技术可以快速获取建筑物的几何形状和细节信息,用于建筑物的设计、维护和修复。
在城市规划中,激光扫描测绘技术可以用于快速获取城市地形和道路的三维数据,为城市规划提供重要参考。
在文化遗产保护中,激光扫描测绘技术可以用于建筑物或文物的数字化保护,方便后续的修复和保存工作。
在制造业中,激光扫描测绘技术可以用于对零部件进行三维重建和检测,提高生产效率和质量控制。
此外,激光扫描测绘技术还可以应用于地质勘探、地下管线检测以及环境监测等领域。
在实际应用中,激光扫描测绘技术还面临着一些挑战。
首先是数据处理和分析的复杂性。
激光扫描仪产生的数据量庞大,需要进行复杂的处理和分析才能得到有用的信息,这对计算资源和算法的要求较高。
其次是测量误差的影响。
由于外界环境的干扰、激光束在传播过程中的衰减等因素,激光扫描测绘技术的测量结果可能存在一定的误差,需要进行误差补偿和校正。
此外,激光扫描测绘技术在某些特殊场景下,如透明物体和反射率较低的物体,可能无法获取准确的测量结果。
为了克服这些挑战,研究人员和工程师们一直在努力改进激光扫描测绘技术。
他们提出了许多新的算法和方法,以提高数据处理和分析的效率,减小测量误差。
例如,基于机器学习的方法可以通过训练模型,提高对扫描数据的自动分割和分类能力。
一、系统简介三维激光扫描技术是上世纪九十年代中期开始出现的一项高新技术,是继GPS空间定位系统之后又一项测绘技术新突破。
它通过高速激光扫描测量的方法,大面积高分辨率地快速获取被测对象表面的三维坐标数据。
可以快速、大量的采集空间点位信息,为快速建立物体的三维影像模型提供了一种全新的技术手段。
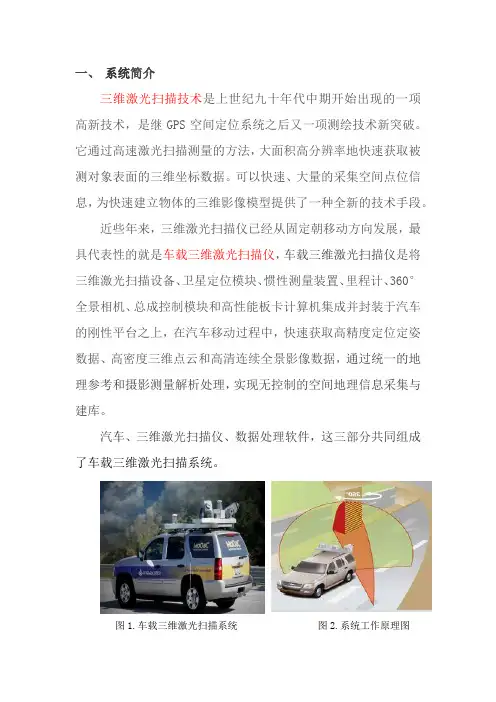
近些年来,三维激光扫描仪已经从固定朝移动方向发展,最具代表性的就是车载三维激光扫描仪,车载三维激光扫描仪是将三维激光扫描设备、卫星定位模块、惯性测量装置、里程计、360°全景相机、总成控制模块和高性能板卡计算机集成并封装于汽车的刚性平台之上,在汽车移动过程中,快速获取高精度定位定姿数据、高密度三维点云和高清连续全景影像数据,通过统一的地理参考和摄影测量解析处理,实现无控制的空间地理信息采集与建库。
汽车、三维激光扫描仪、数据处理软件,这三部分共同组成了车载三维激光扫描系统。
图1.车载三维激光扫描系统图2.系统工作原理图二、发展状况随着地理空间信息服务产业的快速发展,地理空间数据的需求也越来越旺盛。
地理空间数据的生产,成为世界经济增长的一大热点。
目前世界上最大的两家导航数据生产商NavTech和Tele Atlas均将车载三维激光扫描系统作为其数据采集与更新的主要手段,并将该技术视为公司的核心技术。
我国在车载三维激光扫描系统测图领域的研究起步较早,现已在多传感器集成、系统误差检校、直接地理参考技术、交通地理信息系统等方面取得突破性的进展,其中最具代表性的有李德仁院士主持、立得空间信息技术有限公司研制的LD2000-RM车载道路测量系统和刘先林院长主持、首都师范大学研制的SSW车载测图系统。
三、国内的应用经过多年的发展和应用,车载三维激光扫描系统已在我国基础测绘、应急保障测绘、街景导航地图测绘、三维数字城市建设、矿山测绘、公路GIS与公路路产管理、电力GIS数据采集与可视化管理、铁路GIS与铁路资产管理、公安GIS数据采集等项目中得到广泛应用。

探究三维激光扫描仪在矿山井下测量技术中的应用刘彬发布时间:2023-05-08T09:57:13.888Z 来源:《工程建设标准化》2023年5期作者:刘彬[导读] 当前通过三维激光扫描仪设备开展三维测量和实体建模工作的情况下,其主要目的是为获取大量实体表面坐标点的数据和信息。
河北峪耳崖黄金矿业有限责任公司河北承德 067601摘要:当前通过三维激光扫描仪设备开展三维测量和实体建模工作的情况下,其主要目的是为获取大量实体表面坐标点的数据和信息。
矿山井下开展测量工作的情况下,通过对三维激光扫描仪的运用,能够适应矿山井下高温和潮湿以及粉尘恶劣的施工环境下,并提高空区三维形态测量工作的准确性,满足矿山开展数字建模工作的要求与标准,提升矿山井下测量工作数字化和信息化的发展水平,强化矿山生产工作的安全性。
因此,本文主要针对三维激光扫描仪在矿山井下测量技术的应用状况进行分析和研究,并提出科学合理的建议。
关键词:三维激光;扫描仪;矿山井下;测量技术;应用探究引言当前三维激光扫描技术的快速发展,在各个行业中得到广泛推广和运用,其自身具备速度和精确度以及真实度较高的特点,满足各个行业生产工作中的需求与标准。
依照相关调查数据显示,当前三维激光扫描技术在矿山井下测量工作中的应用,逐渐趋向成熟化的方向发展,但在一些工作阶段还是会存在不合理问题,需要相关部门提高重视程度,采取优化和改善措施,针对三维激光扫描技术合理运用,满足矿山井下测量工作的需求与标准。
1三维激光扫描测量系统的阐述针对三维激光扫描测量系统的运行,主要有三个方面工作内容组合而成,包含扫描仪器设备和计算机处理器以及电源供应装置。
在运用扫描仪器设备针对矿山井下区域能够开展全方面和自动化的扫描工作,并获取井下区域具备全面性和连续性以及关联性较高的数据点和坐标。
扫描仪设备在出现激光脉冲信号的情况下,其自身具备周期性的特点,同时激光信号在接触到目标后,会及时反射,并由接收仪器透镜设备接收,脉冲信号会经过长时间的停留,在石英钟稳定的情况下,能够对发射和接收脉冲的时间差合理计算[1]。
三维激光测量技术的原理与使用方法激光测量技术是一种高精度、高效率的测量方法,在工业生产、建筑设计以及科学研究中被广泛应用。
其中,三维激光测量技术作为激光测量技术的一种重要形式,具有更高的精确度和全面性。
本文将介绍三维激光测量技术的原理与使用方法。
一、三维激光测量技术的原理三维激光测量技术是通过测量物体与激光束的相互作用来确定物体表面的点坐标,进而建立物体的三维坐标系统。
其基本原理可以概括为以下几点:1. 激光测距原理:三维激光测量技术主要是基于激光测距原理实现的。
激光器发出的激光束照射到物体上,激光束被物体表面反射后再由激光接收器接收。
通过测量激光束的往返时间,并结合光速的知识,可以计算出激光束从发射到接收的时间,从而得到物体表面的点到激光器的距离。
2. 多点定位原理:三维激光测量技术的另一个重要原理是多点定位原理。
通过在物体表面上布置多个接收器,可以同时接收到多个反射激光束,从而确定物体表面的多个点的坐标。
而通过这些点的坐标,可以建立起物体的三维坐标系统。
3. 反射率校正原理:物体表面的反射率对激光测量结果有一定的影响。
在进行激光测量时,常常需要对物体表面的反射率进行校正,以得到更准确的测量结果。
一般来说,物体表面越光滑,其反射率就越高,对激光的反射也就越强。
二、三维激光测量技术的使用方法三维激光测量技术在实际应用中有多种方法和步骤,可以根据具体需求选择不同的使用方式。
1. 扫描法:三维激光测量技术可以通过扫描法获取目标物体表面的三维信息。
首先,在测量区域内设置扫描器和接收器,扫描器会以一定的速度扫描整个区域,同时记录接收到的反射激光束信息。
然后,将接收到的数据进行处理和分析,得到物体表面各个点的三维坐标数据。
2. 三角测量法:三角测量法是三维激光测量技术中常用的一种方法。
在进行测量之前,确定基准点和测量点的坐标,通过测量激光束与基准点和测量点的夹角,以及激光束与基准点之间的距离,可以利用三角函数计算出测量点的三维坐标。
基于控制器的高速三维激光扫描系统设计与实现随着科技的不断发展,激光技术的应用越来越广泛,如在仓储、制造、医疗等行业都有着重要的作用。
其中,三维激光扫描系统可以快速地获取三维模型,广泛应用于制造业、文化遗产保护、室内设计等领域。
本文将介绍一种基于控制器的高速三维激光扫描系统设计与实现。
一、系统架构系统架构主要由三部分组成:控制器、激光扫描头和制动器。
其中,控制器作为整个系统的核心,主要负责数据处理、控制和传输等任务。
激光扫描头则用于发射激光束并接收反射回来的激光信号。
制动器则起到激光扫描头的定位作用,以确保扫描的精度和精度。
二、系统设计本系统采用的激光扫描头为TOF(Time-of-Flight)类型激光扫描头,其工作原理是计算反射回来的激光信号的往返时间,并通过ToF芯片进行数据转换,从而得到距离信息。
同时,由于ToF激光扫描头的工作频率高,能量密度大,因此可以实现高速扫描。
另外,为了确保扫描的精确性,本系统采用了高精度制动器来控制激光扫描头的运动轨迹。
在控制器的设计方面,本系统选择了基于FPGA(Field-Programmable Gate Array)芯片的控制器,该芯片具有可重构性、并行性、低功耗等特点,适用于高速数据处理和控制。
控制器的软件部分则主要由C语言和Verilog HDL编写而成。
三、系统实现系统实现的关键在于算法的设计和实现。
本系统采用了基于去噪和网格化的数据处理算法,通过滤波、积分、分割、匹配等步骤将原始扫描数据进行处理,最终得到三维点云数据。
算法实现过程中主要采用了C++编程语言。
同时,为了实现高速扫描,本系统采用了基于DSP芯片的数据传输方式,用于实现控制器和激光扫描头之间的快速数据传输。
同时,为了实现较长距离的扫描,本系统还采用了多台激光扫描头的联合扫描方式,以减小扫描盲区和遮挡等现象。
四、系统优化在系统优化方面,本文主要着重从三个方面进行了优化:数据采集、数据处理和数据显示。

0.引言自上世纪六十年代第一台激光测距仪研制成功,三维激光扫描技术是上世纪九十年代中期激光应用研究的又一项重大突破,它通过高速激光扫描测量,大面积、高分辨率获取被测对象表面的三维坐标数据,可以快速、大量的采集空间点位信息,为快速获取空间物体的三维数据信息提供了一种全新的技术手段。
根据权威专家预测,该项技术是即GPS技术后的又一项测绘技术新突破,其应用推广将会引起测绘技术的又一次革命。
1.三维激光扫描技术工作原理扫描仪的发射器通过激光二极管发射近似红外波长的安全激光束,对所测对象进行立体面状扫描,借助设备获取不同对象对激光的反射时间差,从而测出激光与物体之间的距离,最后用编码器来测量镜头旋转角度与激光扫描仪的水平旋转角度,获取被测对象表面每个采样点空间立体坐标,得到被测对象的采样点(离散点)集合,称之为“距离影像”或“点云”。
所获取的由点云组成的影像与通常的扫描的栅格影像最大的区别就是具有矢量化的特性,点云之间具有可量测性。
2.设备分类按照空间位置分类,三维激光扫描设备可分为:1:机载类;2:地面类。
地面扫描设备按照扫描方式的区别细分为地面、车载和船载;以OPTECH公司的三维激光扫描仪为例,地面类按照其功能分为ILRIS—36D、ILRIS—3DER、ILRIS—3DMC、ILRIS—3DVP四种型号。
ILRIS—36D配备有一个马达驱动可旋转和仰俯机座,提供3600的视场,可无缝扫描大面积的区域;ILRIS—3DER距离增强型,使可视能力增加40%;ILRIS—3DMC适合于车载和船载进行移动扫描;ILRIS—3DVP是基本型。
3.设备性能参数以徕卡HDS6000、TrimbleGX3D、ILRIS-3D三种扫描仪为例进行性能参数比较:①徕卡HDS6000扫描仪:扫描距离79m,速度500000/秒,单点测量精度3mm,距离精度0.1mm,标靶获取精度2mm,角度25”。
②TrimbleGX3D扫描仪:扫描距离200m,加长350m,速度5000/秒,单点测量精度12mm@100m,距离精度7mm@100m,标靶获取精度小于1mm,角度(水平角12”;垂直角14”)。
三维激光扫描分类及工作流程一、地面激光扫描系统1、概述地面激光扫描仪系统类似于传统测量中的全站仪,它由一个激光扫描仪和一个内置或外置的数码相机,以及软件控制系统组成。
二者的不同之处在于激光扫描仪采集的不是离散的单点三维坐标,而是一系列的“点云”数据。
这些点云数据可以直接用来进行三维建模,而数码相机的功能就是提供对应模型的纹理信息。
2、工作原理三维激光扫描仪发射器发出一个激光脉冲信号,经物体表面漫反射后,沿几乎相同的路径反向传回到接收器,可以计算日标点P与扫描仪距离S,控制编码器同步测量每个激光脉冲横向扫描角度观测值α和纵向扫描角度观测值β。
三维激光扫描测量一般为仪器自定义坐标系。
某轴在横向扫描面内,Y轴在横向扫描面内与某轴垂直,Z轴与横向扫描面垂直。
获得P的坐标。
进而转换成绝对坐标系中的三维空间位置坐标或三维模型。
3、作业流程整个系统由地面三维激光扫描仪、数码相机、后处理软件、电源以及附属设备构成,它采用非接触式高速激光测量方式,获取地形或者复杂物体的几何图形数据和影像数据。
最终由后处理软件对采集的点云数据和影像数据进行处理转换成绝对坐标系中的空间位置坐标或模型,以多种不同的格式输出,满足空间信息数据库的数据源和不同应用的需要。
(1)、数据获取利用软件平台控制三维激光扫描仪对特定的实体和反射参照点进行扫描,尽可能多的获取实体相关信息。
三维激光扫描仪最终获取的是空间实体的几何位置信息,点云的发射密度值,以及内置或外置相机获取的影像信息。
这些原始数据一并存储在特定的工程文件中。
其中选择的反射参照点都具有高反射特性,它的布设可以根据不同的应用目的和需要选择不同的数量和型号,通常两幅重叠扫描中应有四到五个反射参照点。
(2)、数据处理1)数据预处理数据获取完毕之后的第一步就是对获取的点云数据和影像数据进行预处理,应用过滤算法剔除原始点云中的错误点和含有粗差的点。
对点云数据进行识别分类,对扫描获取的图像进行几何纠正。
三维激光扫描仪的使用教程及效果展示现如今,随着科技的不断进步与发展,我们生活的方方面面都得益于现代科技的蓬勃发展。
其中,三维激光扫描仪作为一种先进的测量工具,正在被广泛应用于各行业中。
本文将为您详细介绍三维激光扫描仪的使用教程,并通过实际案例展示其出色的效果。
一、三维激光扫描仪简介三维激光扫描仪是一种使用激光测距原理进行三维信息采集与处理的仪器。
它通过发射激光束来扫描物体表面,通过接收激光反射回来的信号来测量物体的位置与形状,从而实现对物体的全方位测量与重建。
相比传统的测量工具,三维激光扫描仪具有测量速度快、精度高、操作简便等优势,被广泛应用于建筑、工程、制造、文化遗产保护等领域。
二、三维激光扫描仪的使用教程1. 准备工作在使用三维激光扫描仪之前,首先需要进行一些准备工作。
确保仪器处于正常工作状态,检查扫描仪的设备连接,确保电源充足,以便正常进行扫描操作。
另外,还需选择合适的扫描场景与扫描模式,根据实际需求确定扫描范围与精度。
2. 扫描操作开始扫描之前,我们需要将三维激光扫描仪放置在固定位置,并确保其稳定。
接着,在扫描软件中设置扫描参数,例如分辨率、角度等。
然后,根据扫描仪的指示,将激光束对准目标物体进行扫描。
在扫描过程中,需保持稳定的手持,保持扫描过程的连贯性和准确性。
3. 数据处理与重建一旦扫描完成,我们可以将扫描的数据导入到计算机中进行进一步处理与重建。
主要的数据处理步骤包括点云配准、深度图像处理、三维模型生成等。
通过配准技术,可以将多次扫描的数据进行对齐,形成一个完整的三维模型。
根据实际需求,可以对三维模型进行编辑、修复、优化等操作,以得到更加精确的模型。
三、三维激光扫描仪的效果展示随着三维激光扫描仪的普及与应用,其出色的效果也逐渐展现出来。
下面将通过几个实际案例展示三维激光扫描仪的应用效果。
1. 建筑测量与设计三维激光扫描仪可以快速准确地获取建筑物的外部结构与内部空间信息,方便进行建筑测量与设计。
2023/ 10 37背包式SLAM三维激光扫描系统在房地一体测量中的应用作者简介:欧阳乐(1989-),男,汉族,本科,工程师,注册测绘师,主要从事工程测量、测绘地理信息工作。
E-mail:****************欧阳乐(广东省地质局第七地质大队,广东 惠州 516000)摘 要:针对传统房地一体测量方法存在劳动强度大、外业效率低、房屋密集处GPS 信号差、容易造成数据遗漏等不足,将背包式 S LAM 三维激光扫描系统应用于房地一体测量中。
研究结果表明:背包式SLAM 三维激光扫描系统具有环境适应强、数据采集全面等优势,有效解决了房地一体测量中隐蔽点难以采集的难题,精度完全满足相关规范的要求,为房地一体测量工作提供了一套高效的数据获取方案。
关键词:SLAM;背包式三维激光扫描系统;房地一体;点云1 引言房地一体测量是不动产登记的基础工作。
房地一体,即同步开展农村地籍测量和房产测量,从而形成统一的农村土地和房屋空间信息数据,在此基础上进行统一确权登记,为广大农民合法拥有的不动产颁发房地一体不动产权证书。
传统的房地一体测量方法存在劳动强度大、外业效率低、房屋密集处GPS 信号差、容易造成数据遗漏等不足[1];航空摄影测量技术虽然得到了广泛应用,但受制于农村房屋普遍存在房檐,且房屋间相互遮挡严重,当遇到狭窄巷道时,航空摄影测量技术也难以获取全方位的房屋数据。
当前,三维激光扫描技术因具有高精度、非接触、能获取物体三维坐标信息等优势而被广泛关注[2]。
在不同搭载平台下,架站式激光扫描仪因需要架设多个测站,效率不高,且点云拼接工作量较大;车载式激光扫描仪受路况限制导致点云不够全面,整体工作效率相较于传统作业方式也不显著。
背包式SLAM 三维激光扫描系统弥补了以上两种激光扫描仪的不足,不仅可以深入房屋密集区域采集数据,还可以同时采集室内三维点云数据,将点云数据进行解算和处理后导入成图软件即可绘制不动产图件,有效解决了不动产调查中数据采集不全、调查效率缓慢等问题。
科技信息2009年第31期SCIENCE &TECHNOLOGY INFORMATION 近年来,随着三维激光扫描技术的不断完善与发展,该项技术在数据采集方面显示出高效、快捷、准确、方便等优点。
本文首先介绍了空间数据、空间数据采集技术及其特点。
然后介绍了三维激光扫描技术的基本原理、技术构成以及几种常用的扫描模型。
接下来全面介绍了三维激光扫描测量系统的工作原理、系统组成、一般工作流程、系统的一些特征。
1.研究意义三维激光扫描系统作为一种技术成熟,应用刚刚起步的产品,在某些具体的应用中还存在许多的问题需要研究解决。
对三维激光扫描系统集成的多个传感器部件的融合应用给扫描结果带来误差进行分析,研究激光光斑的发散性对实体边缘和角落信息识别的影响,扫描点云数据的误差传播规律,激光光源对特定的材料的物体反射不敏感或者具有强反射特性的区域使得扫描数据出现“盲区”的现象,扫描视场的局限性等。
如何应用点云数据建立实体表面模型以及评价模型的精度,三维纹理信息的粘贴匹配,评估模型的建立及方法的选择,三维激光扫描系统校正体系不完善等问题都是目前地面三维激光扫描技术应用中亟待解决的。
针对三维激光扫描技术在应用中存在的问题,客观的评价三维激光扫描系统的价值,采取有效的手段弥补应用中的缺陷不足,尽可能的为后续研究人员提供参考借鉴,为推广该技术应用提供客观正确的依据。
借助于该技术的优势实现三维数据实时廉价获取,海量数据的快速存储与快速处理,建立完整的三维空间数据模型,进行精确的地理空间数据表达,都具有重要的意义。
2.三维空间数据与数据采集技术综述2.1三维空间数据采集技术利用天文测量、全站仪、GPS 接收机等其他常规的地面测量方式和激光雷达技术逐点或逐断面地采集地表点的空间坐标及其属性。
2.1.1天文测量技术2.1.2大地测量技术:经纬仪、全站仪、水准仪2.1.3惯性测量技术:惯性测量仪器由陀螺稳定平台、加速度计和微机组成,可安装在运动体(如汽车、飞机、船舶)上,能同时测定空间某点的经纬度、高程、垂线偏差分量和重力异常等6个大地元素。
三维扫描系统什么是三维扫描系统?三维(3D)扫描系统是一种将实物对象数字化并生成三维模型的设备或工具。
它可以快速、精确地获取物体的形状、大小、纹理等信息,从而原始数据可以被导入计算机或其他设备进行后续处理。
三维扫描技术因其高效性、精度和灵活性等特点,被广泛应用于制造业、建筑业、文化遗产及医疗等领域。
三维扫描系统已成为许多行业的利器,它为数字化制造提供了支持,拓展了可视化技术的应用范围。
三维扫描系统的分类三维扫描系统可以根据激光扫描、结构光扫描、相位移测量和立体匹配等原理进行分类。
•激光扫描:激光扫描系统通过激光束直接扫描目标对象表面,得到密集的点云数据,进而生成三维模型,适用于聚焦于目标地形或结构内部形态的高精度数据获取。
•结构光扫描:结构光扫描系统依旧通过构建目标表面的点云信息,但是不是通过激光扫描,而是通过LED灯光的辅助,将图案投影在目标表面上,从而采集目标区域的形状等样本数据,适用于人体扫描和半透明或反光物体的数据采集等应用。
•相位移测量:此类扫描系统依赖于激光或光栅来测量表面形变或物体内部结构的位移变化,量测的两个或多个不同状态下的信号相差就是物体的形变量。
•立体匹配:对于需要移动扫描,但同时要求点云相对于彼此分类组合的场景,多个机器的同步操作是必须的。
直接拍摄或扫描一组图像,用三角测量或立体匹配算法计算相邻像素的深度。
比如,在建筑业中,立体匹配更多地应用于拓扑测量、计算结构物表面形态、模拟之前或之后的工程改进方案等。
每种三维扫描系统都有其优点和局限性,因此应根据不同的应用场景选择不同的系统。
三维扫描系统的应用三维扫描系统已经应用于许多领域:制造行业制造领域中,三维扫描技术可以用于检查和量化零件和装配件。
它可以制作数字模型化的样品和零件库,可以用于进行拓扑优化、逆向工程、快速原型设计、挑战零件可制造性等。
建筑业建筑行业中,三维扫描技术和BIM系统相结合,可以用于建造和修复大型结构,例如桥梁、高速公路、码头和其他大型建筑等的设计,维护,改进和检查,同时能充分进行施工设计,使施工更加安全、可持续和经济。
目前应用的三维激光扫描系统种类繁多,类型、工作领域不尽相同。
按照不同研究角度、工作原理可进行多种分类。
三维激光扫描系统从操作的空间位置可以划分为如下四类:机载型激光扫描系统这类系统在无人机或有人直升机上搭载,由激光扫描仪、成像装置、定位系统、飞行惯导系统、计算机及数据采集器、记录器、处理软件和电源构成,它可以在很短时间内取得大范围的三维地物数据。
地面型激光扫描系统此种系统是一种利用激光脉冲对被测物体进行扫描,可以大面积、快速度、高精度、大密度的取得地物的三维形态及坐标的一种测量设备。
根据测量方式还可划分为两类:一类是移动式激光扫描系统;一类是固定式激光扫描系统。
所谓移动式激光扫描系统,是基于车载平台,由全球定位系统、惯性导航系统结合地面三维激光扫描系统组成。
固定式的激光扫描系统,类似传统测量中的全站仪。
系统由激光扫描仪及控制系统、内置数码相机、后期处理软件等组成。
与全站仪不同之处在于固定式激光扫描仪采集的不是离散的单点三维坐标,而是一系列的“点云”数据。
其特点为扫描范围大、速度快、精度高、具有良好的野外操作性能。
手持型激光扫描仪此类设备多用于采集小型物体的三维数据,一般配以柔性机械臂使用。
优点是快速、简洁、精确。
适用于机械制造与开发、产品误差检测、影视动画制作与医学等众多领域。
特殊场合应用的激光扫描仪如洞穴中应用的激光扫描仪在特定非常危险或难以到达的环境中,如地下矿山隧道、溶洞洞穴、人工开凿的隧道等狭小、细长型空间范围内,三维激光扫描技术亦可以进行三维扫描。
三维激光扫描系统按照扫描仪的测距原理,又划分为如下三类:(1)使用脉冲测距技术。
其测距范围可达数百米,甚至上千米。
(2)基于相位测量原理。
主要用来进行中等距离的扫描测量,其扫描范围一般在百米内,与采用脉冲测距原理的扫描设备相比,它的精度相对为高。
(3)基于光学的三角测量原理。
采用光学三角测量原理的扫描设备,一般工作距离较近,在数米或数十米之内,主要应用于工程测量及逆向建模等工程中,可以达到很高的测量精度。
20C omputer automation计算机自动化三维激光扫描系统在地质灾害监测中的实践分析徐 鑫,李 洪*(四川省第七地质大队,四川 成都 614200)摘 要:通过对三维激光扫描测量系统在地质灾害监测中的实践进行了讨论分析,首先简单介绍了何为三维激光扫描测量系统,分析了该系统的工作原理,随后分析了应用三维激光扫描测量系统的基本工作流程,最后结合实际项目,对三维激光扫描测量系统在地质灾害监测中的实践应用进行了探讨分析,希望能够为相关研究提供一定的参考。
关键词:三维激光扫描系统;地质灾害;监测;应用中图分类号:P694 文献标识码:A 文章编号:1002-5065(2023)20-0020-3Practical analysis of three-dimensional laser scanning system in geological hazard monitoringXU Xin, LI Hong*(The 7th Geological Brigade of Sichuan,Chengdu 614200,China)Abstract: This paper discusses and analyzes the practical application of a 3D laser scanning measurement system in geological hazard monitoring. Firstly, it briefly introduces what a 3D laser scanning measurement system is, analyzes its working principle, and then analyzes the basic workflow of applying a 3D laser scanning measurement system. Finally, combined with practical projects, the practical application of a 3D laser scanning measurement system in geological hazard monitoring is discussed and analyzed, I hope to provide some reference for related research.Keywords: 3D laser scanning system; Geological hazards; Monitoring; application收稿日期:2023-08作者简介:徐鑫,女,生于1991年,汉族,四川眉山人,本科,水文地质、工程地质与环境地质工程师、岩土工程勘察与治理工程师,研究方向:水工环地质。
三维激光扫描测量系统
基本介绍
三维测量可定义为“一种具有可作三个方向移动的探测器,可在三个相互垂直的导轨上移动,此探测器以接触或非接触等方式传送讯号,三个轴的位移测量系统经数据处理器或计算机等计算出工件的各点坐标(X、Y、Z)及各项功能的测量”。
三维测量的测量功能应包括尺寸精度、定位精度、几何精度及轮廓精度等。
2三维测量方式
1)将被测物体置于三坐标测量空间,可获得被测物体上各测点的坐标位置,这项技术就是三坐标测量机的原理。
三坐标测量机是测量和获得尺寸数据的最有效的方法之一,可以替代多种表面测量工具,减少复杂的测量任务所需的时间,为操作者提供关于生产过程状况的有用信息。
2)三维激光扫描仪是通过发射激光来扫描被测物,以获取被测物体表面的三维坐标。
三维激光扫描技术又被称为实景复制技术,具有高效率、高精度的测量优势。
有人说,三维激光扫描是继GPS技术以来测绘领域的又一次技术革命。
三维激光扫描仪被广泛应用于结构测量、建筑测量、船舶制造、铁路以及工程的建设等领域,近些年来,三维激光扫描仪已经从固定朝移动方向发展,最具代表性的就是车载三维激光扫描仪和机载三维激光雷达。
3)[1] 拍照式三维扫描仪采用一种结合结构光技术、相位测量技术、计算机视觉技术的复合三维非接触式测量技术。
这种测量原理,使得对物体进行照相测量成为可能。
所谓拍照测量,就是类似于照相机对视野内的物体进行照相,不同的是照相机摄取的是物体的二维图象,而研制的测量仪获得的是物体的三维信息。
3应用领域
机械、汽车、航空、军工、家具、工具原型等测量高精度的几何零部件以及测量复杂形状的机械零部件。
三维测量技术的应用领域:
最近几年,三维激光扫描技术不断发展并日渐成熟,目前三维扫描设备也逐渐商业化,三维激光扫描仪的巨大优势就在于可以快速扫描被测物体,不需反射棱镜即可直接获得高精度的扫描点云数据。
这样一来可以高效地对真实世界进行三维建模和虚拟重现。
因此,其已经成为当前研究的热点之一,并在文物数字化保护、土木工程、工业测量、自然灾害调查、数字城市地形可视化、城乡规划等领域有广泛的应用。
(1)测绘工程领域:大坝和电站基础地形测量、公路测绘,铁路测绘,河道测绘,桥梁、建筑物地基等测绘、隧道的检测及变形监测、大坝的变形监测、隧道地下工程结构、测量矿山及体积计算。
(2)结构测量方面:桥梁改扩建工程、桥梁结构测量、结构检测、监测、几何尺寸测量、空间位置冲突测量、空间面积、体积测量、三维高保真建模、海上平台、测量造船厂、电厂、化工厂等大型工业企业内部设备的测量;管道、线路测量、各类机械制造安装。
(3)建筑、古迹测量方面:建筑物内部及外观的测量保真、古迹(古建筑、雕像等)的保护测量、文物修复,古建筑测量、资料保存等古迹保护,遗址测绘,赝品成像,现场虚拟模型,现场保护性影像记录。
(4)紧急服务业:反恐怖主义,陆地侦察和攻击测绘,监视,移动侦察,灾害估计,交通事故正射图,犯罪现场正射图,森林火灾监控,滑坡泥石流预警,灾害预警和现场监测,核泄露监测。
(5)娱乐业:用于电影产品的设计,为电影演员和场景进行的设计,3D游戏的开发,虚拟博物馆,虚拟旅游指导,人工成像,场景虚拟,现场虚拟。
三维激光切割行业应用
三维激光切割广泛应用于钣金加工、金属加工、广告制作、厨具、汽车、灯具、锯片、升降电梯、金属工艺品、纺织机械、粮食机械、眼镜制作、航空航天、医疗器械、仪器仪表等行业。
特别是在钣金加工行业中已取代传统加工方式,深受行业用户的青睐。