一种单相异步电动机调速系统
- 格式:pdf
- 大小:164.05 KB
- 文档页数:3
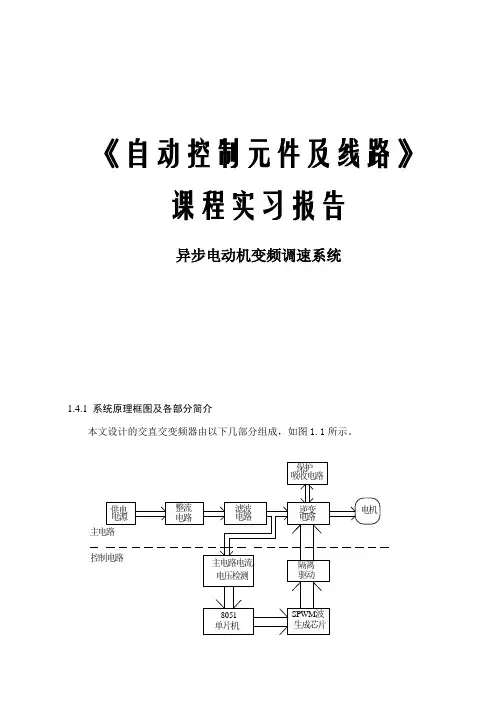
《自动控制元件及线路》课程实习报告异步电动机变频调速系统1.4.1 系统原理框图及各部分简介本文设计的交直交变频器由以下几部分组成,如图1.1所示。
图1.1 系统原理框图系统各组成部分简介:供电电源:电源部分因变频器输出功率的大小不同而异,小功率的多用单相220V,中大功率的采用三相380V电源。
因为本设计中采用中等容量的电动机,所以采用三相380V电源。
整流电路:整流部分将交流电变为脉动的直流电,必须加以滤波。
在本设计中采用三相不可控整流。
它可以使电网的功率因数接近1。
滤波电路:因在本设计中采用电压型变频器,所以采用电容滤波,中间的电容除了起滤波作用外,还在整流电路与逆变电路间起到去耦作用,消除干扰。
逆变电路:逆变部分将直流电逆变成我们需要的交流电。
在设计中采用三相桥逆变,开关器件选用全控型开关管IGBT。
电流电压检测:一般在中间直流端采集信号,作为过压,欠压,过流保护信号。
控制电路:采用8051单片机和SPWM波生成芯片SA4828,控制电路的主要功能是接受各种设定信息和指令,根据这些指令和设定信息形成驱动逆变器工作的信号。
这些信号经过光电隔离后去驱动开关管的关断。
1.4.2 变频器主电路方案的选定变频器最早的形式是用旋转发电机组作为可变频率电源,供给交流电动机。
随着电力半导体器件的发展,静止式的变频电源成为了变频器的主要形式。
静止式变频器从变换环节分为两大类:交-直-交变频器和交-交变频器。
1.交-交型变频器:它的功能是把一种频率的交流电直接变换成另一种频率可调电压的交流电(转换前后的相数相同),又称直接式变频器。
由于中间不经过直流环节,不需换流,故效率很高。
因而多用于低速大功率系统中,如回转窑、轧钢机等。
但这种控制方式决定了最高输出频率只能达到电源频率的1/3~1/2,所以不能高速运行。
2.交-直-交型变频器:交-直-交变频器是先把工频交流通过整流器变成直流,然后再直流变换成频率电压可调的交流,又称间接变频器,交-直-交变频器是目前广泛应用的通用变频器。
单相交流电机调速原理
单相交流电机的调速原理主要包括以下几种方法:
1. 调节供电电压:通过调节电源的电压来改变电机的转速。
降低供电电压会使电机转速下降,增加供电电压则使转速增加。
但是这种方法只适用于感应电动机,对于复杂负载的单相电动机效果不佳。
2. 转子电阻调速:在单相感应电机的转子回路中加入一个可调节的电阻,通过改变电阻的大小来改变电机转速。
增加电阻会减小转矩,从而减小转速。
这种方法适用于无负载或轻负载的场景。
3. 相位移调速:通过改变电动机中的电流和电压的相位差来控制转速。
可以通过改变转子电阻、电容、电感等元件来实现相位差的调节,从而改变电机的转速。
这种方法主要适用于单相感应电动机。
4. 变频调速:使用变频器将电源频率变换为可调节的频率,并将其输入到电动机中,从而实现对转速的精确调节。
变频调速器能够提供稳定的输出电压和频率,适用范围广,可实现精确的转速控制。
通过以上不同的调速方法,可以根据实际需求选择合适的调速方案,实现单相交流电机的转速控制。
第七章异步电动机动态模型调速系统内容提要:异步电动机具有非线性、强耦合、多变量的性质,要获得良好的调速性能,必须从动态模型出发,分析异步电动机的转矩和磁链控制规律,研究高性能异步电动机的调速方案。
矢量控制和直接转矩控制是两种基于动态模型的高性能的交流电动机调速系统,矢量控制系统通过矢量变换和按转子磁链定向,得到等效直流电动机模型,然后按照直流电动机模型设计控制系统;直接转矩控制系统利用转矩偏差和定子磁链幅值偏差的符号,根据当前定子磁链矢量所在的位置,直接选取合适的定子电压矢量,实施电磁转矩和定子磁链的控制。
两种交流电动机调速系统都能实现优良的静、动态性能,各有所长,也各有不足之处。
本章第8.1节首先导出异步电动机三相动态数学模型,并讨论其非线性、强耦合、多变量性质,然后利用坐标变换加以简化,得到两相旋转坐标系和两相静止坐标系上的数学模型。
第8.2节讨论按转子磁链定向的基本原理,定子电流励磁分量和转矩分量的解耦作用,讨论矢量控制系统的多种实现方案。
第8.3节介绍无速度传感器矢量控制系统及基于磁通观测的矢量控制系统。
第8.4节讨论定子电压矢量对转矩和定子磁链的控制作用,介绍基于定子磁链控制的直接转矩控制系统。
第8.5节对上述两类高性能的异步电动机调速系统进行比较,分析了各自的优、缺点。
第8.6节介绍直接转矩控制系统的应用实例。
8.1交流异步电动机动态数学模型和坐标变换基于稳态数学模型的异步电动机调速系统虽然能够在一定范围内实现平滑调速,但对于轧钢机、数控机床、机器人、载客电梯等动态性能高的对象,就不能完全适用了。
要实现高动态性能的调速系统和伺服系统,必须依据异步电动机的动态数学模型来设计系统。
8.1.1三相异步电动机数学模型在研究异步电动机数学模型时,常作如下的假设:(1)忽略空间谐波,设三相绕组对称,在空间中互差120°电角度,所产生的磁动势沿气隙按正弦规律分布;(2)忽略磁路饱和,各绕组的自感和互感都是恒定的;(3)忽略铁心损耗;(4)不考虑频率变化和温度变化对绕组电阻的影响。
交流异步电机调速系统实验报告引言在电力系统中,电机调速是一个非常重要且复杂的问题。
随着技术的不断发展,异步电机调速系统成为了广泛应用的一种方案。
本实验旨在通过搭建和调试一个交流异步电机调速系统,来研究其调速性能和控制策略。
实验目的1.理解交流异步电机调速系统的工作原理;2.掌握电机调速系统的基本组成和实验搭建方法;3.研究不同控制策略对电机调速性能的影响;4.分析实验结果,评价不同控制策略的优劣。
实验原理1.异步电机工作原理:异步电机由主电路和励磁电路组成。
主电路中的三相对称电压产生一个旋转磁场,而励磁电路中的电压和电流则产生感应转子电动势和转矩,使得电机运转起来。
2.异步电机调速原理:异步电机调速主要通过控制转子电阻、定子电压以及改变电机的励磁电流来实现。
常见的调速方法有直接转矩控制(DTC)、矢量控制(VC)等。
实验设备和步骤1.实验设备:–交流异步电动机–实验控制器–电压调节器–电流测量仪–速度测量仪–控制软件2.实验步骤:1.搭建电机调速系统的硬件连接,确保各设备按照要求连接并接通电源。
2.在控制软件中选择合适的控制策略,并设置调速参数。
3.运行实验控制器,观察电机的调速性能,并记录实验数据。
4.根据实验数据分析电机的调速性能,并评价不同控制策略的优劣。
实验结果分析根据实验数据,我们可以得出以下结论:1.不同控制策略对电机调速性能的影响:–直接转矩控制(DTC)可以实现较好的转矩和速度响应,但对转子电阻参数变化较为敏感。
–矢量控制(VC)具有较好的转矩和速度响应特性,并且对转子电阻参数变化不敏感。
2.不同电机负载对调速系统的影响:–在轻载情况下,不同控制策略的性能相对较为接近。
–在重载情况下,矢量控制(VC)表现出较好的调速稳定性和承载能力。
结论本实验通过搭建和调试交流异步电机调速系统,研究了不同控制策略对电机调速性能的影响,并分析了不同负载下的调速系统性能。
通过实验结果,我们得出了以下结论:1.矢量控制(VC)相比直接转矩控制(DTC)具有更好的转矩和速度响应特性,且对转子电阻参数变化不敏感。
异步电动机起动,调速,制动一体化设计方案注:本文将介绍如何设计一个异步电动机的起动、调速和制动一体化系统,将会涉及到电机的基本原理以及一些控制算法。
在不清楚一些专业术语的情况下,查看文末的专业术语解释。
一、设计目标异步电动机起动、调速、制动一体化(以下简称ATB)系统的设计目标是为了实现高效率、高性能、高安全性的电动机运行控制,同时提升运动性能的稳定性和可控性。
具体来说,该ATB系统需要满足以下要求:1.起动阶段,实现平稳起动,避免空载启动造成冲击负荷,同时保证整个起动过程的安全性和可控性。
2.调速阶段,可以实现电机的转速调节及运动状态的实时监测,并通过电控系统动态平衡地调整供电电压、频率、电流等参数,以满足各种运动需求。
3.制动阶段,实现平稳的制动操作,避免电机的超速滑转造成的危险情况或回转惯性超过极限造成电机反转损伤。
二、基础理论1.异步电动机的基本原理异步电动机是将三个交流电源线连接到电机的定子上,并通过电流在定子绕组中产生旋转磁场,进而驱动转子旋转的电机。
定子绕组产生的旋转磁场的频率称为同步转速,转子旋转的实际转速略低于同步转速,因此被称为异步电动机。
2.电机控制的基本原理在AC电机中,控制电机的变量主要有电压、频率、电流等。
因此可以通过控制这些变量来调节电机的转速和输出功率。
通过改变电压和频率来调整供电电源的电压和频率,改变电流来调整电动机的输出功率。
通过对电压、频率和电流等变量的实时监测和动态调整,可以实现丰富的运动控制。
3.电机起动的基本原理电机起动是指将电机从静止状态转变为运动状态的过程。
在电机起动前,电机的转子处于静止状态,因此需要通过适当的控制方法来保证起动时的稳定性和安全性。
一般来说,电机起动的控制方法包括:全电压启动、降压启动、直接柿突启动和变阻启动等。
4.电机制动的基本原理电机制动是指将电机从运动状态转变为静止状态的过程。
在制动前,电机的转子处于旋转状态,因此需要采用正确的制动方法,以平稳完成制动操作而避免电机因制动而受损。
异步电机调压调速系统的matlab仿真代码异步电机是一种常见的电动机类型,广泛应用于各个领域的工业控制系统中。
在工业生产中,对异步电机的调压调速系统进行仿真设计可以帮助工程师们更好地理解电机的工作原理,并且优化控制算法,提高电机的性能和效率。
本文将根据异步电机调压调速系统的需求,介绍如何使用Matlab进行仿真设计。
异步电机调压调速系统主要包括三个部分:电机模型、调速控制器和电源电压。
首先,我们需要建立电机的模型。
在Matlab中,我们可以使用Simulink来搭建电机模型。
在搭建电机模型之前,我们需要明确电机的参数,例如额定功率、额定转速、定子电阻、定子电感、转子电阻、转子电感等。
根据这些参数,我们可以使用Simulink中的“Synchronous Machine”模块来搭建电机模型。
通过调整模块的参数,我们可以设定电机的额定功率和转速。
此外,我们还可以通过添加噪声、扰动等,模拟电机在实际工况下的运行情况。
接下来,我们需要设计调速控制器。
常见的调速控制算法有PID控制、模糊控制、自适应控制等。
在Matlab中,我们可以使用Simulink中的“PID Controller”模块来实现PID控制算法。
在使用PID控制器模块之前,我们需要根据电机的特性调整控制器的参数,例如比例系数、积分时间和微分时间。
通过不断调整参数和观察仿真结果,我们可以优化控制器的性能,实现电机的稳定调速。
最后,我们需要模拟电源电压对异步电机的影响。
在实际应用中,供电电压的波动会对电机的转速和输出功率产生影响。
在Matlab中,我们可以通过添加波动的直流电压源来模拟这种影响。
通过调整电压源的幅值和频率,我们可以观察电压波动对电机转速和输出功率的影响。
这对于调压调速系统的设计和优化非常重要。
在完成上述步骤后,我们可以对整个异步电机调压调速系统进行仿真。
通过控制器和电源电压的输入,我们可以观察电机的转速、输出功率和电流等参数的变化情况。
异步电机调压调速系统的matlab仿真代码一、引言异步电机调压调速系统是工业控制领域中的一个重要研究方向,其应用范围广泛,包括电动汽车、风力发电等。
本文将介绍异步电机调压调速系统的matlab仿真代码。
二、异步电机模型1. 模型简介异步电机是一种常见的交流电动机,其转子和定子之间没有直接的电连接。
异步电机的转速受到供电频率和负载转矩的影响。
在matlab中,可以使用simscape库中的Asynchronous Machine模块来建立异步电机模型。
2. 建立模型在matlab中,打开simscape库并选择Asynchronous Machine模块。
将该模块拖入工作区,并设置参数,如额定功率、额定转速等。
然后连接输入端口和输出端口以完成建模。
三、PID控制器设计1. 控制器简介PID控制器是一种常见的反馈控制器,通过比较设定值和实际值之间的差别来计算控制信号。
在matlab中,可以使用Control System Toolbox库中的PID Controller对象来设计PID控制器。
2. 设计方法首先需要确定调节参数Kp、Ki和Kd。
可以使用试错法或者自适应控制方法来确定这些参数。
然后在matlab中使用PID Controller对象,并设置控制器参数。
四、调压调速系统仿真1. 系统简介异步电机调压调速系统是由异步电机、PID控制器和电源等组成的一个闭环控制系统。
其目的是通过控制电机的转速和电压来实现负载转矩的精确控制。
2. 仿真方法在matlab中,可以使用Simulink库来建立异步电机调压调速系统模型。
将异步电机模型和PID控制器模型连接起来,并添加输入信号和负载转矩信号。
然后运行仿真,并分析结果。
五、总结本文介绍了异步电机调压调速系统的matlab仿真代码,包括建立异步电机模型、设计PID控制器以及建立闭环控制系统模型并进行仿真。
这些内容对于工业控制领域的研究和应用具有重要意义。
交流异步电动机的调速方法及特点异步电动机是一种常用的电动机类型,其调速方法主要有电压调制调速、转子电流调制调速和频率调制调速。
下面将分别介绍这三种调速方法的特点。
1. 电压调制调速:电压调制调速是通过改变电动机的供电电压来实现调速的方法。
在这种方法中,通过改变电动机的输入电压,可以改变电动机的转矩和转速。
电压调制调速主要通过改变电动机的输入电压和功率因数来实现调速。
其特点是调速范围广,调速精度高,但是调速过程中容易产生谐波和电磁干扰。
2. 转子电流调制调速:转子电流调制调速是通过改变电动机的转子电流来实现调速的方法。
在这种方法中,通过改变电动机的转子电流,可以改变电动机的转速和转矩。
转子电流调制调速主要通过改变电动机的转矩特性来实现调速。
其特点是调速范围广,调速精度高,但是调速过程中容易产生转子电流过大和电磁干扰的问题。
3. 频率调制调速:频率调制调速是通过改变电动机的输入频率来实现调速的方法。
在这种方法中,通过改变电动机的输入频率,可以改变电动机的转速和转矩。
频率调制调速主要通过改变电动机的输入频率和电压来实现调速。
其特点是调速范围广,调速精度高,但是调速过程中需要改变电动机的输入电压和频率,所以需要特殊的调速设备。
总的来说,异步电动机的调速方法主要有电压调制调速、转子电流调制调速和频率调制调速。
这三种调速方法各有特点,可以根据实际需求选择合适的调速方法。
电压调制调速适用于调速范围广、调速精度高的场合;转子电流调制调速适用于调速范围广、对调速精度要求较高的场合;频率调制调速适用于调速范围广、对调速精度要求较高的场合。
在实际应用中,根据不同的调速需求和系统要求,可以采用不同的调速方法。
同时,还可以结合多种调速方法,如电压调制和转子电流调制相结合,以实现更精确的调速效果。
在选择调速方法时,需要考虑电动机的负载特性、调速精度要求、系统稳定性等因素,并选择合适的调速设备和控制策略,以实现理想的调速效果。
异步电机调压调速原理异步电机是一种常见的电动机类型,其调压调速原理是通过改变电源的电压和频率来控制电机的转速和负载。
这种调压调速方式广泛应用于工业生产和家庭电器等领域,具有调速范围广、控制精度高等优点。
异步电机的调压调速原理基于电机的转子和定子之间的电磁感应。
当定子绕组通电时,会产生一个旋转磁场,而转子则由于感应电动势的作用而产生转动。
电机的转速与电源的频率成正比,在额定电压下,电机的转速是固定的。
因此,要实现调速,就需要改变电源的电压和频率。
在调压调速系统中,通常使用变压器来改变电源的电压。
通过改变变压器的接线方式,可以实现对电机的调压。
当需要降低电机转速时,可以将变压器的绕组切换到较高的电压端;当需要提高电机转速时,可以将变压器的绕组切换到较低的电压端。
这样,通过改变电源的电压,可以实现对电机转速的调节。
除了调压外,调速系统还需要改变电源的频率。
在传统的调速系统中,通常使用机械式调速装置,通过改变电源的频率来改变电机的转速。
然而,这种方式通常比较复杂且成本较高。
近年来,随着电子技术的发展,越来越多的调速系统采用变频调速技术。
变频调速技术是一种通过改变电源的频率来控制电机转速的方法。
在变频器中,电源的交流电先经过整流器变成直流电,然后经过逆变器变成可调频率的交流电。
通过改变逆变器的输出频率,可以实现对电机转速的调节。
变频调速具有调速范围广、控制精度高、运行平稳等优点,已经成为现代调速系统中最常用的调速方式之一。
在实际应用中,异步电机的调压调速系统通常由电源、变压器、变频器和电机等组成。
通过控制变压器和变频器的工作状态,可以实现对电机的精确调速。
此外,还可以通过反馈控制系统来实现闭环控制,提高系统的稳定性和控制精度。
异步电机的调压调速原理是通过改变电源的电压和频率来控制电机的转速和负载。
调压调速系统通常由变压器、变频器和电机等组成,通过控制这些设备的运行状态和参数,可以实现对电机的精确调速。
这种调压调速方式已经在工业生产和家庭电器等领域得到广泛应用,为各种设备的运行提供了便利和灵活性。
3 结束语利用晶闸管设计静止式变频电源,目前已成为矿井提升机低频拖动一个重要的研究开发方向[6],在具体设计开发过程中如果能尽可能利用其他辅助工具,如用S函数设计数字触发器和用Matlab建模等,不但可以最大程度地降低设计成本,而且可以很方便地对矿井提升机低频电源进行仿真设计。
参考文献:[1] 赵良炳.现代电力电子技术[M].北京:清华大学出版社,1995.[2] Chen Z,S pooner E.A AC to AC converter with thyristor in2verter and active compensation[C].P ower E lectronics and S peed Drives C on ference1996.[3] 易灵芝,王根平.基于T MS320LF2407A的三相低频电源设计[J].矿山机械,2003,31(12):6769.[4] 魏克新.王云亮.M AT LAB语言与自动控制系统[M].北京:机械工业出版社,1999.[5] 易灵芝,王根平.用Delphi实现矿井提升机低频电源装置中可控硅触发角的计算[J].煤矿机械,2004,(3):1719.[6] 马小亮.大功率交-交变频调速及矢量控制技术[M].北京:机械工业出版社,1999.作者简介:易灵芝 (1966),女,湖南宁乡人,湘潭大学信息工程学院硕士研究生导师,副教授,2000年度湖南省普通高等学校青年骨干教师培养对象,研究方向为计算机测控技术、交流调速与电力电子装置;王根平 (1966),男,江西南昌人,浙江大学浙江大学机电系博士,高工,研究方向为计算机测控技术、通信及信号处理。
收稿日期:2004-05-19一种单相异步电动机调速系统赵红菊1,杨 勇1,王孝武2(1.哈尔滨工程大学,黑龙江哈尔滨,150001;2.哈尔滨市整流设备厂,黑龙江哈尔滨,150023)A K ind of Regulation S peed System for Single Asynchronous M otorZH AO H ong-ju1,YANG Yong1,WANG Xiao-wu2(1.Harbin Engineering University,Harbin150001,China;2.Harbin C ommute Factory,Harbin150023,China) 摘要:介绍了一种使用双向可控硅调压的小功率交流闭环调速系统。
详细说明系统各组成部分及原理,并根据单相异步电动机的启动特性,设计出一种将双极性信号变为单极性信号并解出方向信号的控制电路。
关键词:单相异步电动机;交流调速;双向晶闸管中图分类号:TP272文献标识码:A文章编号:1001-2257(2004)08-0034-03Abstract:A kind of speed regulation system for AC -m otor using TRI AC was introduced in this paper.The system and the principle of each part were given in detail. Meanwhile,according to the start-trait of single asyn2 chronous m otor,the double-polar being trans formed into single-polar and giving signal-direction,a circle was designed.K ey w ords:single asynchronous m otor;AC regula2 tion speed;TRI AC0 引言单相异步电动机具有结构简单、成本低廉、运行可靠等优点,因而在小功率自动控制装置中得到了广泛应用[1]。
但是由于单相异步电动机自身没有启动能力即启动转矩为零,所以要对单相异步电动机进行调速,必须对电动机产生启动转矩采取合适的方法。
1 单相异步电动机调速原理[2-3]电容运转式异步电动机的接线原理如图1所示。
电动机定子上有2个绕组AX和BY,分别称主绕组和副绕组,其轴线在空间相互垂直。
在2个绕组之间串有运转电容C ,选择适当的参数能使2绕组中的电流产生90°的相位差,实现电机自行启动。
当电动机的接线方式如图1所示时,即开关QB 在1位置,由于运转电容C 与绕组BY 串连,通电后绕组BY 中的电流超前绕组AX 中的电流一定电角度,电动机正转。
反之,当QB 在2位置时,电动机反转。
单相异步电动机常用的调速方法有调压调速、变极调速和变频调速3种方式。
对于小功率系统:变频调速成本比较高,变极调速只能调定几个固定的速度,而调压调速不仅成本比较低,还可以实现速度连续可调,所以采用调压调速。
图1 电动机接线原理图2 调速系统组成对于调压调速方式,采用双向晶闸管调压。
在调压调速方式下,异步电动机在轻载时,即使外加电压变化很大,转速变化也很小;而在重载时,如果降低供电电压,则转速下降很快,甚至停转,从而引起电动机过热甚至烧坏[4]。
为了能保证低速时的机械特性硬度,又能保证一定的负载能力,采用转速负反馈构成闭环系统。
系统结构原理如图2所示。
码盘测得的电动机转速经过整形电路、频压转换电路后作为反馈信号,给定电压与此信号作减法,其信号偏差值经PI 调节器送给晶闸管调压电路驱动电动机转动,构成一个闭环调速系统。
图2 交流调速原理框图2.1 PI 调节器在自动控制系统中,PI D 调节器是广泛应用的校正装置[5]。
系统采用了PI 调节器,系统没有加入微分环节,微分环节虽然能改善系统的动态响应特性,同时也容易产生振荡,对于快速性要求不高的场合,比例积分环节已经能够满足系统的要求。
即用比例环节尽量保证系统的快速性;积分环节消除系统的稳态误差。
2.2 触发及驱动电路如图3所示。
驱动主回路采用双向可控硅驱动交流电动机。
触发电路采用单相全桥整流电路和两级比较器给可控硅提供触发信号。
在触发电路与驱动电路之间用MOC3021进行光电隔离,以完成双向驱动和减小前后级之间的干扰。
交流信号经全桥整流电后与2脚固定的电压相比较,在LM393的1脚由于电容的充放电形成100H z 的锯齿波。
比较器1脚输出的锯齿波与PI 调节器输出信号比较,在比较器7脚产生触发用宽脉冲。
通过改变比较器5脚输入电压的大小,就可以改变双向晶闸管的导通角,实现交流调压。
2.3 速度反馈速度反馈由孔盘加光电对管、整形电路和频压转换电路3部分组成。
由于孔盘得到的方波信号不规则,所以电路中设计了整形电路,把不规则的方波图3 驱动主回路及可控硅触发电路变为规则的方波,用于后级的频压转换电路。
经频压转换后得到的电压信号作为速度反馈。
3 正反转控制电路电容运转式异步电动机的正反转控制是通过切换电容器C 的串连位置来实现[6]。
为此,设计出如图4所示(双极性信号变单极性信号并解出方向信4 结束语采用调压调速的方法在低速运行时,电动机有可能引起过热,但对于短时间工作于低速区的情况,应用文中介绍的调速系统可以得到比较好的调速特性,实用于调速精度不高的场合。
实际应用表明,此调速系统运行平稳,工作可靠。
图4 双极性变单极性并解出方向信号电路号)的电路。
信号变换电路由绝对值电路、回差电压比较器和继电器等组成。
继电器的3个输出端A 、B 、C 分别与电容运转式异步电动机的绕组和交流220V 电压相连。
由于给定信号为-5~+5V ,而调压电路要求输入信号为单极性,所以选用如图4中的绝对值电路[7-8]。
绝对值电路由2个运算放大器(U2A 、U2B )、4个二极管(D 1~D 4)和5个电阻(R 4~R 8)组成。
当输入信号为负时,D 1、D 4截至,D 2、D 3导通,U2A 、R 4和R 5组成反向器,所以U 0=-R 4R 5U i;当输入信号为正时,D 1、D 4导通,D 2、D 3截至,U2B 为电压跟随器,所以U 0=U i 。
由于采用继电器切换电容,为了防止控制信号在零点附近时继电器的频繁切换,采用回差电压比较器给控制信号制造1个死区。
如图4所示,回差电压比较器由运算放大器U1A 、电位器W 3和电阻R 9、R 10组成。
运算放大器U1A 采用正反馈,电路呈现为具有滞回形式的传输特性,滞回线宽度通过电位器W 3调节。
此滞回线宽度即给控制信号制造的死区决定继电器的切换门限,防止了继电器频繁切换,使系统振荡。
U1A 的输出控制继电器动作。
参考文献:[1] 王正茂.电机学[M].西安:西安交通大学出版社,2000.[2] 李德成.单相异步电动机原理、设计与试验[M].北京:科学出版社,1993.[3] 邓星钟.机电传动控制[M].武汉:华中科技大学出版社,2001.[4] 范正翘.电力传动与自动控制系统[M].北京:北京航空航天大学出版社,2003.[5] 董玉红.机械控制工程基础[M].哈尔滨:哈尔滨工业大学出版社,2003.[6] 赵 霞,陈永利.浅谈单相异步电动机的反转[J ].电力电子教学学报,2003,25(4):7374[7] 王 岚.机电接口技术[M].北京:中央广播电视大学出版社,2003.[8] 张立勋.机械电子学[M].哈尔滨:哈尔滨工程大学出版社,1998.作者简介:赵红菊 (1979),女,满族,辽宁西丰人,哈尔滨工程大学机电学院硕士研究生,研究方向为机电一体化技术;杨 勇 (1971),男,汉族,黑龙江依安人,哈尔滨工程大学机电学院博士研究生,研究方向为机电一体化技术。