机械振动之简谐振动
- 格式:pptx
- 大小:1.18 MB
- 文档页数:60
机械振动简谐振动和波动机械振动:简谐振动和波动机械振动是物体在外力作用下沿某个方向上的周期性运动。
简谐振动是机械振动的一种特殊形式,它是指物体在恢复力作用下,其加速度与其位移成正比且方向相反。
简谐振动的数学描述可以用以下公式表示:x(t) = A * sin(ωt + φ)其中,x(t)是物体在时间t时刻的位移,A是振幅,ω是角频率,φ是初相位。
简谐振动具有以下几个特点:1. 周期性:简谐振动的运动是周期性的,即物体在一个周期内重复相同的位移和速度变化。
2. 等幅振动:简谐振动的振幅保持不变,即振幅A是一个常量。
3. 谐波运动:简谐振动的位移和速度随时间变化呈正弦函数关系。
4. 对称性:简谐振动的振动曲线关于平衡位置对称。
除了简谐振动,机械振动还包括其他形式的振动,如阻尼振动和强迫振动。
阻尼振动是在有阻力存在的情况下的振动,外力会通过摩擦或空气阻力对物体的振动进行阻尼。
强迫振动是外力对振动系统施加周期性扰动,使系统执行非自由振动。
与简谐振动相比,波动是一种沿介质传播的幅度和能量传递的周期性变化。
波动可分为机械波和电磁波两种形式。
机械波是指通过一种介质的振动传播的波动,如水波、声波等。
电磁波是指由电场和磁场相互垂直且相互作用的波动,如光波、电磁辐射等。
波动具有以下特点:1. 传播性:波动是通过媒介或空间传播的,能够传递能量和动量。
2. 反射和折射:波动在传播过程中遇到界面时会发生反射和折射现象。
3. 干涉和衍射:当两个或多个波动相遇时,会发生干涉和衍射现象,形成新的波动模式。
4. 周期性:波动是周期性的,其振幅和频率可以随时间和空间的变化而改变。
机械振动和波动在物理学中扮演着重要的角色。
它们不仅存在于自然界中,也广泛应用于工程、医学、地球科学等领域。
对机械振动和波动的深入理解可以帮助人们解释自然界中的现象,同时也对技术和科学的发展产生重要影响。
简谐振动的概念
简谐运动随时间按余弦(或正弦)规律的振动,或运动。
又称简谐振动。
简谐运动是最基本也最简单的机械振动。
当某物体进行简谐运动时,物体所受的力跟位移成正比,并且总是指向平衡位置。
它是一种由自身系统性质决定的周期性运动。
(如单摆运动和弹簧振子运动)实际上简谐振动就是正弦振动。
故此在无线电学中简谐信号实际上就是正弦信号。
扩展资料
简谐振动位移公式:x=Asinωt
简谐运动恢复力:F=-KX=-md^2x/dt^2=-mω^2x
ω^2=K/m
简谐运动周期公式:T=2π/ω=2π(m/k)^1/2
如果质点的位移与时间的关系遵从正弦函数的规律,即它的振动图像(x-t图像)是一条正弦曲线,这样的振动叫做简谐运动。
R是匀速圆周运动的半径,也是简谐运动的振幅;ω是匀速圆周运动的角速度,也叫做简谐运动的圆频率,ω=√(k/m);
φ是t=0时匀速圆周运动的物体偏离该直径的角度(逆时针为正方向),叫做简谐运动的初相位。
在t时刻,简谐运动的位移x=Rcos(ωt+φ),简谐运动的速度v=-ωRsin(ωt+φ),简谐运动的加速度a=-(ω^2)Rcos(ωt+φ),这三个式子叫做简谐运动的方程。
机械振动和简谐振动机械振动是自然界和工程实践中常见的现象,而简谐振动则是机械振动中最为基本和重要的模型。
本文将介绍机械振动和简谐振动的概念、特点以及一些应用。
一、机械振动的概念和特点机械振动是物体围绕平衡位置做周期性的往复运动。
它可以是机械系统中的部件振动,也可以是整个机械系统的振动。
机械振动往往由质点或弹簧等弹性元件的弹力引起。
其特点如下:1. 周期性:机械振动的运动是周期性的,当物体围绕平衡位置做一次完整的往复运动后又回到同样的位置和状态。
这一周期性使得机械振动具有可预测性和可重复性。
2. 频率:机械振动的频率是其运动的重要特征,代表了单位时间内振动的次数。
频率与振动周期的倒数成正比,可以通过实验或计算得到。
3. 幅度:机械振动的幅度代表了振动的最大位移或最大速度。
幅度与振动的能量大小相关,可以通过实验或计算得到。
4. 阻尼和驱动力:机械振动中常常存在阻尼和外加驱动力。
阻尼消耗了振动的能量,而驱动力则为物体提供了能量,影响了振动的稳定性和特性。
5. 谐振现象:在机械振动中,当外加力的频率接近物体的固有频率时,会出现谐振现象。
谐振时,振动幅度最大,能量传递效率高。
二、简谐振动的概念和特点简谐振动是机械振动中最简单的一种形式,其模型假设了无阻尼和驱动力的作用。
简谐振动具有以下特点:1. 一维振动:简谐振动在物理模型中往往被假设为一维振动,即物体围绕一个平衡位置在一条直线上往复振动。
2. 束缚性:简谐振动在一个有限范围内进行,物体保持在某个平衡位置附近做往复运动,不会无限制地扩散或发散。
3. 固有频率:简谐振动的频率与物体的固有特性有关,而与外界的驱动力无关。
物体的固有频率可以通过实验或计算得到。
4. 振幅和相位:简谐振动的振幅和相位是其两个重要的参数。
振幅代表振动的最大位移或速度,而相位则代表振动的位置关系。
5. 能量守恒:在简谐振动中,能量在势能和动能之间周期性转换,总能量保持不变,体现了能量守恒定律。
机械振动和简谐运动机械振动是指物体围绕平衡位置做周期性的来回摆动或震动运动。
而简谐运动是一种特殊的机械振动,它遵循简谐规律,即物体的加速度与到平衡位置的距离成正比,方向相反。
本文将深入探讨机械振动和简谐运动的原理、特性以及应用。
一、机械振动的原理机械振动是由于物体受到外力的作用而做周期性运动。
当物体受到外力推动或扰动时,会发生位移、速度和加速度的变化,从而形成振动运动。
机械振动的原理包括弹性恢复力和阻尼力。
1. 弹性恢复力弹性恢复力是导致振动的主要力量。
当物体发生位移时,如果存在恢复力使其向平衡位置回归,就会产生周期性的振动。
弹性恢复力遵循胡克定律,即恢复力与位移成正比。
2. 阻尼力除了弹性恢复力,振动运动还会受到阻尼力的影响。
阻尼力是由摩擦或其他阻碍物体运动的因素引起的,它会减弱振动的幅度和频率。
二、简谐运动的特性简谐运动是一种理想化的振动运动,具有以下特性:1. 平衡位置与振幅在简谐运动中,物体的平衡位置是振动的中心位置,振幅是物体离开平衡位置的最大位移距离。
2. 周期与频率简谐运动具有恒定的周期性和频率。
周期是振动完成一个完整往复运动所需的时间,频率是单位时间内完成的振动次数。
3. 加速度与位移的关系根据简谐运动的规律,物体的加速度与位移成正比,方向相反。
加速度最大值出现在平衡位置两侧的最大位移处,而在平衡位置的位移为零,加速度也为零。
4. 能量转换与守恒简谐运动过程中,物体的动能和势能会不断转化。
当物体位移最大时,动能最大,而当物体位移为零时,势能最大。
整个过程中,机械能保持不变。
三、机械振动的应用机械振动作为一种常见的物理现象,具有广泛的应用。
以下是几个常见的机械振动应用:1. 振动传感器振动传感器可以检测物体的振动状态,并将其转化为电信号。
它在工业生产、航空航天等领域具有重要作用,可用于监测设备的运行状况和诊断故障。
2. 摆钟摆钟利用物体的机械振动实现时间测量。
当钟摆摆动时,其周期可用于计时,摆钟被广泛应用于家庭和公共场所。
机械振动公式总结机械振动是指物体在作有规律的往复运动时所表现出的现象,它广泛应用于工程领域,例如机械工程、建筑工程、航空航天工程等。
机械振动公式是描述机械振动性质和特点的数学公式,可以用于计算、分析和预测机械振动的参数和行为。
下面是一些常见的机械振动公式的总结。
1.简谐振动公式简谐振动是指在没有外力或外力恒定时,物体的振动是以弹性势能和动能的相互转化为基础的。
简谐振动公式可以表示为:x = A sin(ωt + φ)其中,x表示位移,单位为米;A表示振幅,单位为米;ω表示角速度,单位为弧度/秒;t表示时间,单位为秒;φ表示初相位,单位为弧度。
2.弹性力系数公式弹性力系数是描述弹性材料力学性质的一个参数,也是机械振动中重要的参数之一、弹性力系数公式可以表示为:F = kx其中,F表示受力,单位为牛顿;k表示弹性力系数,单位为牛顿/米;x表示位移,单位为米。
3.自然频率公式自然频率是指物体在没有外力作用时,在固有的弹性约束条件下产生的振动频率。
自然频率公式可以表示为:f=1/(2π)*√(k/m)其中,f表示自然频率,单位为赫兹;k表示弹性力系数,单位为牛顿/米;m表示质量,单位为千克。
4.阻尼振动公式阻尼振动是指在振动过程中存在能量损失的振动,由于摩擦、空气阻力等因素的存在。
阻尼振动公式可以表示为:x = e^(-βt) * (Acos(ωdt + φ1) + Bsin(ωdt + φ2))其中,x表示位移,单位为米;β表示阻尼系数,单位为弧度/秒;ωd表示阻尼角频率,单位为弧度/秒;t表示时间,单位为秒;A、B、φ1、φ2表示振动的参数。
5.多自由度振动公式多自由度振动是指多个物体同时进行复杂的振动过程,可以通过多自由度振动公式来描述。
多自由度振动公式可以表示为:M¨+KX=0其中,M表示质量矩阵,K表示刚度矩阵,X表示位移矩阵。
通过这些机械振动公式,我们可以计算出机械系统的振幅、频率、质量、弹性力系数等参数,进而进行分析和预测。
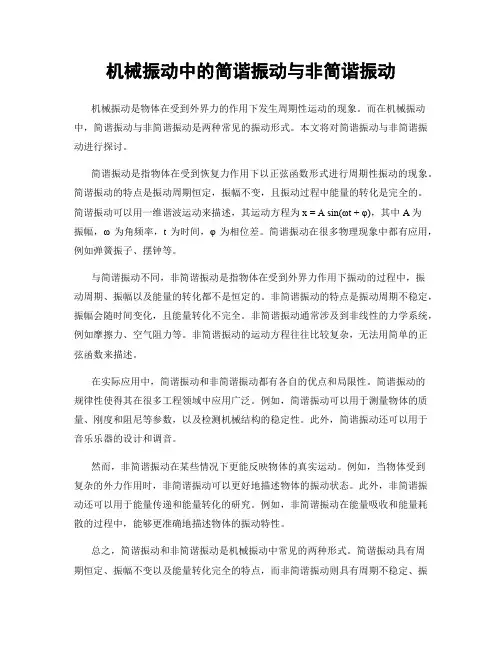
机械振动中的简谐振动与非简谐振动机械振动是物体在受到外界力的作用下发生周期性运动的现象。
而在机械振动中,简谐振动与非简谐振动是两种常见的振动形式。
本文将对简谐振动与非简谐振动进行探讨。
简谐振动是指物体在受到恢复力作用下以正弦函数形式进行周期性振动的现象。
简谐振动的特点是振动周期恒定,振幅不变,且振动过程中能量的转化是完全的。
简谐振动可以用一维谐波运动来描述,其运动方程为x = A sin(ωt + φ),其中A为振幅,ω为角频率,t为时间,φ为相位差。
简谐振动在很多物理现象中都有应用,例如弹簧振子、摆钟等。
与简谐振动不同,非简谐振动是指物体在受到外界力作用下振动的过程中,振动周期、振幅以及能量的转化都不是恒定的。
非简谐振动的特点是振动周期不稳定,振幅会随时间变化,且能量转化不完全。
非简谐振动通常涉及到非线性的力学系统,例如摩擦力、空气阻力等。
非简谐振动的运动方程往往比较复杂,无法用简单的正弦函数来描述。
在实际应用中,简谐振动和非简谐振动都有各自的优点和局限性。
简谐振动的规律性使得其在很多工程领域中应用广泛。
例如,简谐振动可以用于测量物体的质量、刚度和阻尼等参数,以及检测机械结构的稳定性。
此外,简谐振动还可以用于音乐乐器的设计和调音。
然而,非简谐振动在某些情况下更能反映物体的真实运动。
例如,当物体受到复杂的外力作用时,非简谐振动可以更好地描述物体的振动状态。
此外,非简谐振动还可以用于能量传递和能量转化的研究。
例如,非简谐振动在能量吸收和能量耗散的过程中,能够更准确地描述物体的振动特性。
总之,简谐振动和非简谐振动是机械振动中常见的两种形式。
简谐振动具有周期恒定、振幅不变以及能量转化完全的特点,而非简谐振动则具有周期不稳定、振幅变化以及能量转化不完全的特点。
两者在实际应用中各有优劣,根据具体情况选择合适的振动形式,可以更好地研究和应用机械振动的相关问题。
机械振动中的简谐受迫振动机械振动是物体在受到外力作用下沿某一方向上周期性地来回振动。
其中一种重要的机械振动类型是简谐振动。
简谐振动是指物体在恢复力作用下以正弦或余弦函数的形式进行周期性振动的现象。
而受迫振动是指振动系统受到外部周期性作用力的影响而产生的振动。
一、简谐振动简谐振动是振动学的基本概念之一,广泛应用于物理学和工程学中。
在简谐振动中,物体的振动将以固定的频率和振幅进行周期性的往复运动。
简谐振动的特点有以下几点:1. 恢复力与位移成正比:在简谐振动中,恢复力与物体的位移成正比。
当物体偏离平衡位置时,恢复力将使物体向平衡位置回归。
恢复力的大小与物体的位移成正比,且方向与位移方向相反。
2. 反弹力恒定:简谐振动的恢复力是恒定的,即简谐振动系统的恢复力不随时间变化而改变。
3. 以正弦曲线进行描述:简谐振动的位移随时间变化的图像是正弦曲线或余弦曲线。
位移达到极大值或极小值时,速度和加速度都为零;位移过零点时,速度达到极大值或极小值,且方向相反。
二、受迫振动受迫振动是指振动系统受到外部周期性作用力的影响而产生的振动。
在受迫振动中,振动系统的固有频率与外力的频率相同或接近。
当外力频率接近振动系统的固有频率时,振动系统会出现共振现象。
受迫振动的特点如下:1. 振动系统受到周期性外力作用:受迫振动是振动系统受到外力作用下进行的振动。
外力可以是周期性变化的,可以是正弦函数或其他类型的周期性函数。
2. 外力频率与振动系统固有频率相近:受迫振动中,外力的频率与振动系统的固有频率相近,这将导致振动系统出现共振现象。
共振时,振幅会被进一步放大。
3. 外力对振动系统的影响:外力将改变振动系统的振幅和相位,振动系统的响应将随外力的变化而变化。
受迫振动在实际生活和工程中有着重要的应用。
例如,建筑结构在地震时的振动是一种受迫振动;无线电和电子设备中的电路振荡器也是受迫振动的例子。
结论机械振动中的简谐受迫振动是振动学中的重要概念。
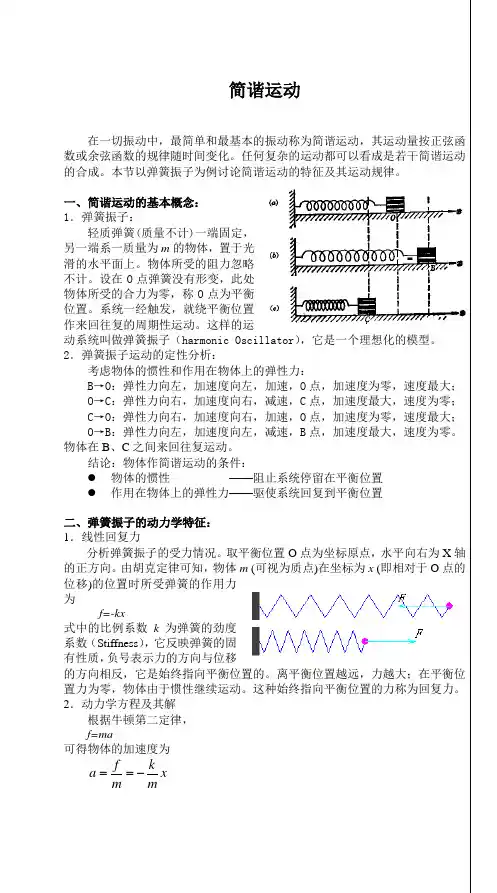
第1节简谐运动知识点一机械振动与简谐振动1.机械振动(1)机械振动:物体(或物体的某一部分)在某一位置两侧所做的往复运动,简称振动。
(2)平衡位置:物体能静止的位置(即机械振动的物体所围绕振动的位置)。
2.简谐运动(1)回复力:①概念:当物体偏离平衡位置时受到的指向平衡位置的力。
②效果:总就是要把振动物体拉回至平衡位置。
(2)简谐运动:①定义:如果物体所受的力与它偏离平衡位置的位移大小成正比,并且总就是指向平衡位置,则物体所做的运动叫做简谐运动。
②公式描述:F=-kx(其中F表示回复力,x表示相对平衡位置的位移,k为比例系数,“-”号表示F与x方向相反)。
[总结拓展]1.弹簧振子应满足的条件(1)质量:弹簧质量比小球质量小得多,可以认为质量只集中于振子(小球)上。
(2)体积:弹簧振子中与弹簧相连的小球的体积要足够小,可以认为小球就是一个质点。
(3)阻力:在振子振动过程中,忽略弹簧与小球受到的各种阻力。
(4)弹性限度:振子从平衡位置拉开的最大位移在弹簧的弹性限度内。
2.简谐运动的位移(1)定义:振动位移可用从平衡位置指向振子所在位置的有向线段表示,方向为从平衡位置指向振子所在位置,大小为平衡位置到该位置的距离。
(2)位移的表示方法:以平衡位置为坐标原点,以振动所在的直线为坐标轴,规定正方向,则某时刻振子偏离平衡位置的位移可用该时刻振子所在位置的坐标来表示。
3.简谐运动的回复力(1)由F=-kx知,简谐运动的回复力大小与振子的位移大小成正比,回复力的方向与位移的方向相反,即回复力的方向总就是指向平衡位置。
(2)公式F=-kx中的k指的就是回复力与位移的比例系数,而不一定就是弹簧的劲度系数,系数k由振动系统自身决定。
4.简谐运动的速度(1)物理含义:速度就是描述振子在平衡位置附近振动快慢的物理量。
在所建立的坐标轴(也称为“一维坐标系”)上,速度的正负号表示振子运动方向与坐标轴的正方向相同或相反。
(2)特点:如图1-1-1所示为一简谐运动的模型,振子在O 点速度最大,在A 、B 两点速度为零。
机械振动之简谐振动简介机械振动是物体围绕平衡位置做周期性的运动。
其中,简谐振动是一种特殊的机械振动,其运动规律可以用简单的数学公式进行描述。
简谐振动在物理学中具有重要的应用,可以用于研究弹簧、天平、钟摆等各种振动系统。
简谐振动的定义简谐振动是指系统在恢复力作用下,以固有频率围绕平衡位置做频率保持不变的周期性运动。
简谐振动可以用以下的数学表达式来描述:x(t) = A * cos(ωt + φ)其中,x(t)代表位移,A代表振幅,ω代表角频率,t代表时间,φ代表相位。
振动系统的简谐振动机械振动系统可以通过简谐振动来描述其运动规律。
一个典型的振动系统包括质量、弹簧和阻尼器。
质量与弹簧连接,当弹簧发生变形时,会产生恢复力,使质量做周期性的振动。
阻尼器则会减小振动系统的振幅。
例子:弹簧振子弹簧振子是一个经典的简谐振动系统。
它由一个质量与弹簧相连组成,可以进行自由振动。
弹簧振子的运动方程可以用以下的形式来表达:m * d^2x/dt^2 = -k * x其中,m代表质量,x代表位移,k代表弹簧常数。
弹簧振子的解析解为:x(t) = A * cos(ωt + φ)其中,角频率ω和振幅A可以通过以下公式计算得到:ω = sqrt(k/m)A = x(0)弹簧振子的周期T和频率f可以通过以下公式计算得到:T = 2π/ωf = 1/T相关参数解释•位移(x):物体离开平衡位置的距离。
•振幅(A):位移的最大值,即振动的最远距离。
•角频率(ω):振动的角速度,单位为弧度/秒。
•相位(φ):振动在某一时刻与参考位置之间的偏移。
•周期(T):振动完成一个完整周期所需要的时间。
•频率(f):振动单位时间内完成的周期数。
简谐振动在物理学的研究中具有广泛的应用。
以下是一些常见的应用领域:工程•悬挂桥梁的振动分析:通过简谐振动的理论,可以分析悬挂桥梁的振动频率,以避免共振现象的发生。
•机械零件的设计:通过对机械零件的简谐振动特性的研究,可以优化设计,提高机械性能。
机械振动与简谐振动机械振动是物体围绕其平衡位置做周期性的来回运动。
在机械振动的研究中,简谐振动是其中最基本也是最重要的一种形式。
本文将首先介绍机械振动的基本概念和原理,然后重点探讨简谐振动的特性和应用,最后讨论简谐振动的实际工程问题。
一、机械振动的基本概念与原理机械振动是指由于物体受到外力或能量的激励而产生的周期性的振荡运动。
其中,简谐振动是指物体在振动过程中回复力与位移成正比的振动。
简谐振动的定义如下:\[F = -k \cdot x\]其中,\(F\)代表回复力,\(k\)代表弹簧的劲度系数,\(x\)代表物体的位移。
简谐振动的特点是振动周期固定,频率不变。
当物体受到外力激励时,振动的幅度随时间呈正弦函数变化。
二、简谐振动的特性与应用简谐振动具有许多重要的特性和广泛的应用。
下面将分别从振动特性和应用两个方面进行探讨。
1. 振动特性简谐振动具有以下特性:(1)振幅:振幅是指物体在振动过程中位移的最大值。
简谐振动的振幅与物体的能量有直接关系,振幅越大,能量越大。
(2)周期:周期是指物体完成一个完整振动所需的时间。
简谐振动的周期与弹簧的劲度系数和质量有关,质量越大,周期越长。
(3)频率:频率是指单位时间内振动的次数。
简谐振动的频率与周期存在倒数关系,频率越高,周期越短。
2. 应用简谐振动在许多领域中都有重要的应用,例如:(1)钟摆:钟摆的摆动是一种简谐振动,通过调整钟摆的长度和重力加速度,可以使钟摆的振动周期保持恒定。
(2)弹簧振子:弹簧振子是一种典型的简谐振动装置,广泛应用于实验和测量中。
通过改变振子的质量或弹簧的劲度系数,可以调节振动的频率。
(3)电子钟:电子钟内部的石英晶体会产生简谐振动,通过将这种振动转化为时间的计量单位,实现钟表的准确计时。
三、简谐振动的实际工程问题简谐振动的实际工程问题主要包括振动控制和振动测试两个方面。
1. 振动控制振动控制主要是为了减少或消除机械系统中的振动,以提高系统的稳定性和工作效率。