《结构力学习题集及答案》(下)1a
- 格式:doc
- 大小:1.42 MB
- 文档页数:20

第三章 静定结构的位移计算一、判断题:1、虚位移原理等价于变形谐调条件,可用于求体系的位移。
2、按虚力原理所建立的虚功方程等价于几何方程。
3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。
4、求图示梁铰C 左侧截面的转角时,其虚拟状态应取:A.;;B.D.C.=1=15、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。
6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。
M kM p21y 1y 2**ωω( a )M =17、图a 、b 两种状态中,粱的转角ϕ与竖向位移δ间的关系为:δ=ϕ 。
8、图示桁架各杆E A 相同,结点A 和结点B 的竖向位移均为零。
Aaa9、图示桁架各杆EA =常数,由于荷载P 是反对称性质的,故结点B 的竖向位移等于零。
二、计算题:10、求图示结构铰A 两侧截面的相对转角ϕA ,EI = 常数。
qlll /211、求图示静定梁D 端的竖向位移 ∆DV 。
EI = 常数 ,a = 2m 。
a a a10kN/m12、求图示结构E 点的竖向位移。
EI = 常数 。
ll l /3/3q13、图示结构,EI=常数 ,M =⋅90kN m , P = 30kN 。
求D 点的竖向位移。
P 3m3m3m14、求图示刚架B 端的竖向位移。
q15、求图示刚架结点C 的转角和水平位移,EI = 常数 。
q16、求图示刚架中D点的竖向位移。
EI = 常数。
l/217、求图示刚架横梁中D点的竖向位移。
EI = 常数 。
18、求图示刚架中D点的竖向位移。
E I = 常数 。
qll/219、求图示结构A、B两截面的相对转角,EI = 常数 。
l/3l/320、求图示结构A 、B 两点的相对水平位移,E I = 常数。
ll21、求图示结构B 点的竖向位移,EI = 常数 。

《结构力学》课程习题集一、单项选择题1. 弯矩图必定发生突变的截面是()。
A. 有集中力作用的截面;B.剪力为零的截面;C.荷载为零的截面;D.有集中力偶作用的截面。
2. 图示梁中 C 截面的弯矩是()。
12kN . m 4kN 3kN / mC4m 4m 2mA.12kN.m( 下拉 );B.3kN.m( 上拉 );C.8kN.m( 下拉 );D.11kN.m( 下拉 )。
3. 静定结构有变温时,()。
A. 无变形,无位移,无内力;B.有变形,有位移,有内力;C.有变形,有位移,无内力;D.无变形,有位移,无内力。
4. 图示桁架 a 杆的内力是()。
A.2P ;B. -2P;; D. - 3P。
P P Pda3 d5. 图示桁架,各杆EA 为常数,除支座链杆外,零杆数为()。
A. 四根;B. 二根;C.一根;D. 零根。
P PaP Pl = 6a6. 图示梁 A 点的竖向位移为(向下为正)()。
A. Pl 3 /( 24 EI ) ;B. Pl 3 /(16 EI ) ;C. 5Pl3/( 96EI );D. 5Pl3/(48 EI )。
P2 EI EIl/ 2 A l/ 27. 静定结构的内力计算与()。
A.EI 没关;B.EI 相对值相关;C.EI 绝对值相关;D.E 没关, I 相关。
8. 图示桁架,零杆的数量为:()。
A.5 ;;; D.20 。
9. 图示结构的零杆数量为()。
A.5 ;B.6 ;; D.8 。
10. 图示两结构及其受力状态,它们的内力切合()。
A. 弯矩同样,剪力不一样;B.弯矩同样,轴力不一样;C.弯矩不一样,剪力同样;D.弯矩不一样,轴力不一样。
P P P P2P 2PEI EI EI EIh 2EI EIl ll l11. 刚结点在结构发生变形时的主要特点是()。
A. 各杆能够绕结点结心自由转动;B.不变形;C.各杆之间的夹角可随意改变;D.各杆之间的夹角保持不变。
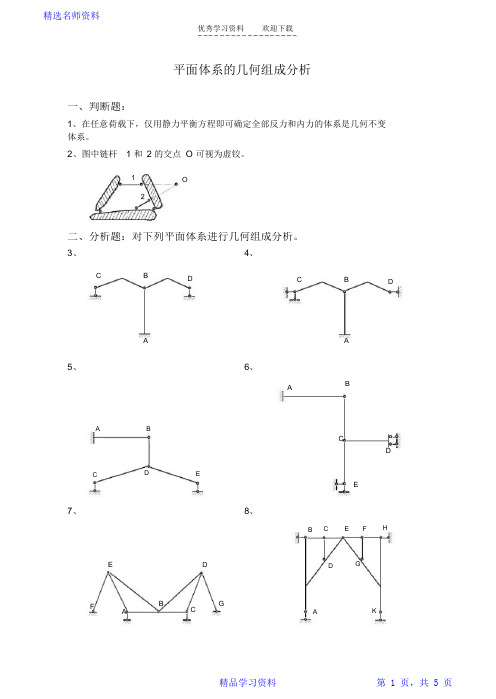
平面体系的几何组成分析
一、判断题:
1、在任意荷载下,仅用静力平衡方程即可确定全部反力和内力的体系是几何不变体系。
2、图中链杆 1 和2 的交点O 可视为虚铰。
1O
2
二、分析题:对下列平面体系进行几何组成分析。
3、4、
B
C D C B
D
A A
5、6、
B
A
A B
C
D
D E
C
E
7、8、
H
C E F
B
E G
D D
B G
F C
K
A A
11、12、
234
5
1
13、14、15、16、17、18、
4
5
1
3
2
21、22、
5
678
4
5
14
3
2
1
23
23、24、
6
45
23
1
25、26、
27、28、
31、32、
33、
A B C
F
D
E
三、在下列体系中添加支承链杆,
使之成为无多余约束的几何不变体系。
34、
35、
平面体系的几何组成分析(参考答案)
1、(O)
2、(X )
是无3、7、9、10、11、13、14、17、18、19、20、22、23、25、27、28、30、31、32、33、均
多余约束的几何不变体系。
4、8、12、29、均是几何瞬变体系。
5、15、均是几何可变体系。
6、21、24、26、均是有一个多余约束的几何不变体系。
16、是有两个多余约束的几何不变体系。

《结构力教》课程习题集之阳早格格创做一、单选题1. 直矩图肯定爆收突变的截里是(D).A.有集结力效率的截里;B.剪力为整的截里;C.荷载为整的截里;D.有集结力奇效率的截里.2. 图示梁中C截里的直矩是(D).A.12kN.m(下推);B.3kN.m(上推);C.8kN.m(下推);D.11kN.m(下推).3. 静定结构有变温时,(C).A.无变形,无位移,无内力;B.有变形,有位移,有内力;C.有变形,有位移,无内力;D.无变形,有位移,无内力.4. 图示桁架a杆的内力是(D).A.2P;B.-2P;C.3P;D.-3P.5. 图示桁架,各杆EA 为常数,除收座链杆中,整杆数为( A ).A.四根;B.二根;C.一根;D.整根.6. 图示梁A 面的横背位移为(背下为正)( C ).A.)24/(3EI Pl ;B.)16/(3EI Pl ;C.)96/(53EI Pl ;D.)48/(53EI Pl .7. 静定结构的内力估计与( A ).无关;相对付值有关;千万于值有关;无关,I 有关.8. 图示桁架,整杆的数目为:(C ).;;;.9. 图示结构的整杆数目为(C ).;;;.10. 图示二结构及其受力状态,它们的内力切合(B ).A.直矩相共,剪力分歧;B.直矩相共,轴力分歧;C.直矩分歧,剪力相共;D.直矩分歧,轴力分歧.11. 刚刚结面正在结构爆收变形时的主要特性是(D ).A.各杆不妨绕结面结心自由转化;B.稳定形;C.各杆之间的夹角可任性改变;D.各杆之间的夹角脆持稳定.12. 若荷载效率正在静定多跨梁的基础部分上,附属部分上无荷载效率,则(B).A.基础部分战附属部分均有内力;B.基础部分有内力,附属部分不内力;C.基础部分无内力,附属部分有内力;D.不通过估计,无法推断.13. 图示桁架C 杆的内力是(A).A.P;B.-P/2;C.P/2;.14. 用单位荷载法供二截里的相对付转角时,所设单位荷载应是(D).A.一对付大小相等目标好异的集结荷载;B.集结荷载;C.直矩;D.一对付大小相等目标好异的力奇.15. 用图乘法供位移的需要条件之一是:(B).A.单位荷载下的直矩图为背去线;B.结构可分为等截里直杆段;C.所有杆件EI为常数且相共;D.结构必须是静定的.16. 普遍正在画制效率线时,所施加的荷载是一个(B).A.集结力奇;B.指背稳定的单位移动集结力;C.单位力奇;D.集结力.17. 下图中各图乘截止精确的是(D).A. B. C. D.S=y0 S=1y1+2y2 S=y0 S=y018. 图示伸臂梁,B收座左侧截里'B的剪力效率线精确的是(A).A. B.C. D.19. 利用机动法做静定梁效率线的本理是(A).A.真功本理;B.叠加本理;C.仄稳条件;D.变形条件.20. 图示伸臂梁的效率线为哪个量值的效率线(C).A.QA F左;B.QA F;C.QA F右;D.RA F.21. 图示结构,超静定次数为( B ).A.9;B.12;C.15;D.20.22. 力法圆程中的系数δki表示的是基础结构由(B).A.X i爆收的沿X k目标的位移;B.X i=1爆收的沿X k目标的位移;C.X i=1爆收的沿X i目标的位移;D.X k=1爆收的沿X i目标的位移.23. 对付称结构正在对付称荷载效率下,其(A).A.直矩图战轴力图对付称,剪力图阻挡付称,变形与位移对付称;B.直矩图战轴力图对付称,剪力图对付称;变形与位移阻挡付称;C.直矩图战轴力图对付称,剪力图对付称,变形与位移对付称;D.直矩图战轴力图对付称,剪力图阻挡付称,变形与位移阻挡付称.24. 力法的基础已知力是通过变形协做条件决定的,而位移法基础已知量是通过( A )条件决定的.A.仄稳;B.物理;C.图乘法;D.变形协做.25. 图示结构,超静定次数为(A).A.4;B.5;C.6;D.7.26. 图示结构的超静定次数为( C ).A.3;B.4;C.5;D.6.27. 挨启对接三个刚刚片的复铰,相称于去掉( C )个拘束?A.2;B.3;C.4;D.5.28. 图示结构C截里不为整的是( D ).A.横背位移;B.直矩;C.轴力;D.转角.29. 力法的基础已知量是( A ).A.多余已知力;B.收座反力;C.独力的结面线位移;D.角位移.30. 对付于下图所示结构,下列叙述精确的是( D ).A.A面线位移为整;B.AB杆无直矩;C. AB杆无剪力;D. AB杆无轴力.31. 位移法典范圆程中主系数一定( B ).A.等于整;B.大于整;C.小于整;D.大于等于整.32. 正在位移法中,将铰接端的角位移,滑动收撑端的线位移动做基础已知量( B ).A.千万于不可;B.不妨,但是不必;C.一定条件下不妨;D.必须.33. 估计刚刚架时,位移法的基础结构是( C ).A.单跨静定梁的集中体;B.静定刚刚架;C.单跨超静定梁的集中体;D.超静定铰结体.34. 正在位移法基础圆程中,k ij代表( A ).⊿j=1时,由于⊿j=1正在附加拘束i处爆收的拘束力;⊿i=1时,由于⊿i=1正在附加拘束j处爆收的拘束力;C.⊿j=1时,正在附加拘束j处爆收的拘束力;D.⊿i=1时,正在附加拘束i处爆收的拘束力.35. 位移法的基础已知量是( C ).A.收座反力;B.杆端直矩;C.独力的结面位移;D.多余已知力.二、推断题36. 有多余拘束的体系一定是几许稳定体系.(X)37. 形成二元体的链杆不妨是复链杆.(√)38. 每一个无铰启关框皆有3个多余拘束.(√)39. 如果体系的估计自由度等于其本量自由度,那么该体系不多余拘束.(√)40. 若体系的估计自由度小于大概等于整,则该体系一定是几许稳定体系.(X)41. 对付于静定结构,改变资料的本量大概者改变横截里的形状战尺寸,不会改变其内力分散,也不会改变其变形战位移.(X)42. 下图所示二相共的对付称刚刚架,启受的荷载分歧,但是二者的收座反力是相共的.(X)43. 温度改变,收座移动战制制缺面等果素正在静定结构中均引起内力.(X)44. 图示结构火仄杆件的轴力战直矩均为0.(X)45. 正在荷载效率下,刚刚架战梁的位移主假如由于各杆的蜿蜒变形引起.(√)46. 用机动法做得下图(a)所示结构Q左效率线如图(b)所示.b(X)47. 效率线的正背号仅表示本量的内力(大概反力)与假设的目标是可普遍.(√)48. 静定结构指定量值的效率线经常由直线段组成的合线,合面位于铰结面战欲供截里处.(√)49. 荷载的临界位子必定有一集结力效率正在效率线顶面,若有一集结力效率正在效率线顶面也必为一荷载的临界位子.(X)50. 一组集结移动荷载效率下,简收梁的千万于最大直矩不可能出当前跨中截里.(X)51. 力法的基础体系是不唯一的,且不妨是可变体系.(X)52. n次超静定结构,任性去掉n个多余拘束均可动做力法基础结构.(X)53. 图(a)对付称结构可简化为图(b)去估计.(X)54. 下图所示结构的超静定次数是n=8.(X)55. 超静定结构正在荷载效率下的内力估计与各杆刚刚度相对付值有关.(√)56. 超静定结构正在收座移动、温度变更效率下会爆收内力.(√)57. 超静定结构中的杆端力矩只与决于杆端位移.(X)58. 位移法的基础结构有多种采用.(X)59. 位移法是估计超静定结构的基础要领,不克不迭供解静定结构.(X)60. 位移法圆程的物理意思是结面位移的变形协做圆程.(X)三、估计题161. 供下图所示刚刚架的直矩图.62. 用结面法大概截里法供图示桁架各杆的轴力.63. 请用叠加法做下图所示静定梁的M 图.64. 做图示三铰刚刚架的直矩图.65. 做图示刚刚架的直矩图.四、估计题266. 用机动法做下图中E M 、L QB F 、R QB F 的效率线.67. 做图示结构F M 、QF F 的效率线.68. 用机动法做图示结构效率线L Q B F F M ,.69. 用机动法做图示结构R Q B C F M ,的效率线.70. 做图示结构QB F 、E M 、QE F 的效率线.五、估计题371. 用力法做下图所示刚刚架的直矩图.72. 用力法供做下图所示刚刚架的M 图.73. 利用力法估计图示结构,做直矩图.74. 用力法供做下图所示结构的M 图,EI=常数.75. 用力法估计下图所示刚刚架,做M 图.六、几许构制分解 76.77.78.79.80.81.82.83.84.85.七、估计题4(略)……问案一、单选题1. D2. D3. C4. D5. A6. C7. A8. C9. C10. B11. D12. B14. D15. B16. B17. D18. A19. A20. C21. B22. B23. A24. A25. A26. C27. C28. D29. A30. D31. B32. B34. A35. C二、推断题36. Х37.√38.√39.√40. Х41. Х42. Х43. Х44. Х45.Ö46. Х47.√48.√49. Х50. Х51. Х53. Х54. Х55.√56.√57. Х58. Х59. Х60. Х三、估计题161. 解:与完齐为钻研对付象,由0A M =∑,得2220yB xB aF aF qa +-= (1)(2分)与BC 部分为钻研对付象,由0C M =∑,得yB xB aF aF =,即yB xB F F =(2)(2分)由(1)、(2)联坐解得23xB yB F F qa ==(2分) 由0x F =∑有 20xA xB F qa F +-= 解得 43xA F qa =-(1分)由0y F =∑有 0yA yB F F += 解得 23yA yB F F qa =-=-(1分) 则2224222333D yB xB M aF aF qa qa qa =-=-=()(2分)直矩图(3分)62. 解:(1)推断整杆(12根).(4分)(2)节面法举止内力估计,截止如图.每个内力3分(3×3=9分)63. 解:(7分)(6分)64. 解:由0B M=∑,626P RA F F =⨯,即2P RA F F =(↓)(2分) 由0y F =∑,2P RB RA F F F ==(↑)(1分)与BE 部分为断绝体0E M =∑,66yB RBF F =即2P yB F F =(←)(2分) 由0x F =∑得2PyA F F =(←)(1分)故63DE DA yA PM M F F ===(内侧受推)(2分) 63CB CE yB P M M F F ===(中侧受推)(2分)(3分)65. 解:(1)供收座反力.对付完齐,由0x F =∑,xA F qa =(←)(2分)0A M =∑,22308RC F a qa qa ⨯--=,178RC F qa =(↑)(2分)(2)供杆端直矩.0AB DC M M ==(2分)2BA BC xA M M F a qa ==⨯=(内侧受推)(2分)2248CB CD a a qa M M q ==⨯⨯=(中侧受推)(2分) (3分)四、估计题266. 解:(1)C M 的效率线(4分)(2)L QB F 的效率线(4分)(2)R QB F 的效率线(4分)67. 解:(1)F M 的效率线(6分)(2)QF F 的效率线(6分)68. 解:F M 效率线(6分)L Q B F 效率线(6分)69. 解:Q Bc F M ,效率线(6分) R Q B c F M ,效率线(6分)70. 解:(1)QB F 的效率线.(4分)E M 的效率线.(4分)QE F 的效率线.(4分)五、估计题371. 解:(1)本结构为一次超静定结构,与基础体系如图(a )所示.(2分)(2)典型圆程11110P X δ+∆=(2分)(3)画制P M 、1M 分别如图(b )、(c )所示.(3分)(a ) (b )(c ) (d )(4)用图乘法供系数战自由项.333111433l l l EI EI δ=+=(2分)232112217()22336P l Pl Pl Pl l Pl EI EI-⨯∆=++⨯=-(2分) (5)解圆程得1178P X =(1分) (6)利用11P M M X M =+画制直矩图如图(d )所示.(2分)72. 解:1)采用基础体系(2分)那是一次超静定刚刚架,可去掉B 端火仄拘束,得到如下图所示的基础体系.2)列力法圆程(2分)3)画制基础体系的Mp 图战单位直矩图,估计系数、自由项(6分,Mp 图战单位直矩图各2分,系数每个1分,截止过失得一半分)解圆程得: 1128ql X =(1分) 做M 图:11PX MM M =+(3分) 73. 解:(2分) (3分)(1分)(2*4=8分)74. 解:与基础体系如图(2分)列力法基础圆程:11110p X δ+∆=(2分)1M 图(1.5分) p M 图(1.5分)3113l EI δ= (2分) 418p ql EI ∆=-(2分)代进力法圆程得 138ql X =(1分) M 图(2分)75. 解:(1)采用基础体系如图(a )所示(2分)(a )(2)列力法圆程.11112210P X X δδ++∆=(1分)21122220P X X δδ++∆=(1分) (3)分别做P M 、1M 战2M 图(1*3=3分) (4)供系数战自由项.2241111315()32428Pqa a qa a a a qa EI EI ∆=-⋅⋅⋅+⋅⋅=-⋅(1分) 422111()224P qa qa a a EI EI ∆=-⋅⋅⋅=-(1分)3111124()233a a a a a a a EI EIδ=⋅⋅⋅+⋅⋅=(1分) 322112()233a a a a EI EI δ=⋅⋅⋅=(分)3122111()22a a a a EI EI δδ==⋅⋅⋅=(分)将上述数据代进基础圆程得137X qa =,2328X qa =(1分)(5)利用叠加法做直矩图如图.(2分)六、几许构制分解76. 图中,刚刚片AB、BE、DC由不共线的三个铰B、D、E对接,组成一个大刚刚片,再战天基前提用不相接也不齐仄止的三链杆贯串,组成不多余拘束的几许稳定体系(5分).77. 如图所示的三个刚刚片通过不正在共背去线上的A、B、C三个铰二二贯串形成无多余拘束的夸大刚刚片,正在此前提上依次减少二元体(1,2)、(3,4)、(5,6)、(7,8)组成无多余拘束的几许稳定体系.(5分)78. 如图所示的三个刚刚片通过共背去线上的A、B、C三个铰二二贯串形成了瞬变体系.(5分)79. 如图刚刚片Ⅰ、Ⅱ、Ⅲ通过不共线的三铰二二贯串组成了无多余拘束的几许稳定体系.(5分)80. 如图依次裁撤二元体(1,2)、(3,4)、剩下刚刚片Ⅰ战天里刚刚片Ⅱ通过一铰战不过该铰的链杆组成了几许稳定体系,故本量系是无多余拘束的几许稳定体系.(5分)81. 如图刚刚片Ⅰ、Ⅱ、Ⅲ通过不共线的三铰二二贯串组成了无多余拘束的几许稳定体系.(5分)82. 如图刚刚片Ⅰ、Ⅱ、Ⅲ通过不共线的三铰二二贯串组成了无多余拘束的几许稳定体系.(5分)83. 如图以铰接三角形ABC为基础刚刚片,并依次减少二元体(1,2)、(3,4)、(5,6)、(7,8)、(9,10)产死夸大刚刚片,其战天里刚刚片通过铰A战节面B 处链杆组成了几许稳定体系,11杆为多余拘束,故本量系为含有1个多余拘束的几许稳定体系.(5分)84. 如图依次裁撤二元体(1,2)、(3,4)、(5,6),刚刚片Ⅱ战天里刚刚片Ⅰ通过相接于共一面的三根链杆组成了瞬变体系.(5分)85. 如图依次裁撤二元体(1,2)、(3,4)、(5,6)、(7,8)、(9,10)、(11,12)后只剩下天里刚刚片,故本量系是无多余拘束的几许稳定体系.(5分)七、估计题4(略)……。

平面体系的几何组成分析一、判断题:1、在任意荷载下,仅用静力平衡方程即可确定全部反力和内力的体系是几何不变体系。
2、图中链杆1和2的交点O 可视为虚铰。
O二、分析题:对下列平面体系进行几何组成分析。
3、 4、CDBCDB5、 6、A CDBEABCDE7、 8、ABCD GE FA BCDEFGHK11、 12、1234513、 14、15、 16、17、 18、1245321、 22、123456781234523、 24、12345625、 26、27、 28、31、32、33、BA CFDE三、在下列体系中添加支承链杆,使之成为无多余约束的几何不变体系。
34、35、平面体系的几何组成分析(参考答案)1、(O)2、(X)3、7、9、10、11、13、14、17、18、19、20、22、23、25、27、28、30、31、32、33、均是无多余约束的几何不变体系。
4、8、12、29、均是几何瞬变体系。
5、15、均是几何可变体系。
6、21、24、26、均是有一个多余约束的几何不变体系。
16、是有两个多余约束的几何不变体系。
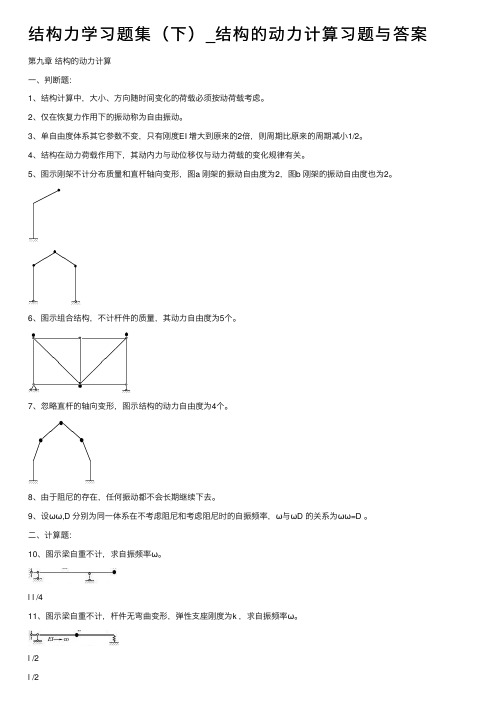
结构⼒学习题集(下)_结构的动⼒计算习题与答案第九章结构的动⼒计算⼀、判断题:1、结构计算中,⼤⼩、⽅向随时间变化的荷载必须按动荷载考虑。
2、仅在恢复⼒作⽤下的振动称为⾃由振动。
3、单⾃由度体系其它参数不变,只有刚度EI 增⼤到原来的2倍,则周期⽐原来的周期减⼩1/2。
4、结构在动⼒荷载作⽤下,其动内⼒与动位移仅与动⼒荷载的变化规律有关。
5、图⽰刚架不计分布质量和直杆轴向变形,图a 刚架的振动⾃由度为2,图b 刚架的振动⾃由度也为2。
6、图⽰组合结构,不计杆件的质量,其动⼒⾃由度为5个。
7、忽略直杆的轴向变形,图⽰结构的动⼒⾃由度为4个。
8、由于阻尼的存在,任何振动都不会长期继续下去。
9、设ωω,D 分别为同⼀体系在不考虑阻尼和考虑阻尼时的⾃振频率,ω与ωD 的关系为ωω=D 。
⼆、计算题:10、图⽰梁⾃重不计,求⾃振频率ω。
l l /411、图⽰梁⾃重不计,杆件⽆弯曲变形,弹性⽀座刚度为k ,求⾃振频率ω。
12、求图⽰体系的⾃振频率ω。
l l0.5l 0.513、求图⽰体系的⾃振频率ω。
EI = 常数。
ll 0.514、求图⽰结构的⾃振频率ω。
l l15、求图⽰体系的⾃振频率ω。
EI =常数,杆长均为l 。
16、求图⽰体系的⾃振频率ω。
杆长均为l 。
17、求图⽰结构的⾃振频率和振型。
l /218、图⽰梁⾃重不计,W EI ==??2002104kN kN m 2,,求⾃振圆频率ω。
B2m2m19、图⽰排架重量W 集中于横梁上,横梁EA =∞,求⾃振周期ω。
EIEIW20、图⽰刚架横梁∞=EI 且重量W 集中于横梁上。
求⾃振周期T 。
EIEIWEI 221、求图⽰体系的⾃振频率ω。
各杆EI = 常数。
a aa22、图⽰两种⽀承情况的梁,不计梁的⾃重。
求图a 与图b的⾃振频率之⽐。
l /2/2(a)l /2l /2(b)23、图⽰桁架在结点C 中有集中重量W ,各杆EA 相同,杆重不计。
求⽔平⾃振周期T 。
第三章 静定结构的位移计算一、判断题:1、虚位移原理等价于变形谐调条件,可用于求体系的位移。
2、按虚力原理所建立的虚功方程等价于几何方程。
3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。
4、求图示梁铰C 左侧截面的转角时,其虚拟状态应取:A.;; B.D.C.M =15、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。
6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。
M k M p 21y 1y 2**ωω( a )M 17、图a 、b 两种状态中,粱的转角ϕ与竖向位移δ间的关系为:δ=ϕ 。
8、图示桁架各杆E A 相同,结点A 和结点B 的竖向位移均为零。
a a9、图示桁架各杆EA =常数,由于荷载P 是反对称性质的,故结点B 的竖向位移等于零。
二、计算题:10、求图示结构铰A 两侧截面的相对转角ϕA ,EI = 常数。
q l l l /211、求图示静定梁D 端的竖向位移 ∆DV 。
EI = 常数 ,a = 2m 。
a a a 10kN/m12、求图示结构E 点的竖向位移。
EI = 常数 。
l l l l /3 2 /3/3q13、图示结构,EI=常数 ,M =⋅90kN m , P = 30kN 。
求D 点的竖向位移。
P 3m 3m 3m14、求图示刚架B 端的竖向位移。
q15、求图示刚架结点C 的转角和水平位移,EI = 常数 。
16、求图示刚架中D点的竖向位移。
EI =常数。
l ll/217、求图示刚架横梁中D点的竖向位移。
EI=常数。
18、求图示刚架中D点的竖向位移。
E I = 常数。
qll l/l/2219、求图示结构A、B两截面的相对转角,EI=常数。
l/23l/320、求图示结构A、B两点的相对水平位移,E I = 常数。
ll21、求图示结构B点的竖向位移,EI = 常数。
第三章 静定结构的位移计算一、判断题:1、虚位移原理等价于变形谐调条件,可用于求体系的位移。
2、按虚力原理所建立的虚功方程等价于几何方程。
3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。
4、求图示梁铰C 左侧截面的转角时,其虚拟状态应取:A.;;B.D.C.=1=15、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。
6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。
M kM p21y 1y 2**ωω( a )M =17、图a 、b 两种状态中,粱的转角ϕ与竖向位移δ间的关系为:δ=ϕ 。
8、图示桁架各杆E A 相同,结点A 和结点B 的竖向位移均为零。
aa9、图示桁架各杆EA =常数,由于荷载P 是反对称性质的,故结点B 的竖向位移等于零。
二、计算题:10、求图示结构铰A 两侧截面的相对转角ϕA ,EI = 常数。
qlll /211、求图示静定梁D 端的竖向位移 ∆DV 。
EI = 常数 ,a = 2m 。
a a a10kN/m12、求图示结构E 点的竖向位移。
EI = 常数 。
ll l /32 /3/3q13、图示结构,EI=常数 ,M =⋅90kN m , P = 30kN 。
求D 点的竖向位移。
P 3m3m3m14、求图示刚架B 端的竖向位移。
q15、求图示刚架结点C 的转角和水平位移,EI = 常数 。
q16、求图示刚架中D点的竖向位移。
EI =常数。
l ll/217、求图示刚架横梁中D点的竖向位移。
EI=常数。
18、求图示刚架中D点的竖向位移。
E I = 常数。
qll l/2219、求图示结构A、B两截面的相对转角,EI=常数。
l/23l/320、求图示结构A、B两点的相对水平位移,E I = 常数。
ll21、求图示结构B点的竖向位移,EI = 常数。
结构力学习题集答案结构力学是土木工程和机械工程中的一个重要分支,它主要研究结构在外力作用下的内力、变形和稳定性问题。
结构力学习题集通常包含了各种类型的题目,旨在帮助学生更好地理解和掌握结构力学的基本概念和计算方法。
以下是一些结构力学习题集的典型答案示例:# 结构力学习题集答案题目1:单跨梁的弯矩和剪力计算解答:对于一个简单的单跨梁,当受到集中荷载或均布荷载时,我们可以通过静力平衡方程来计算其弯矩和剪力。
例如,对于一个跨度为\( L \)的单跨简支梁,在中点施加一个集中荷载\( P \),其最大弯矩为\( M_{max} = \frac{PL}{4} \),剪力为\( V = -P \)(负号表示方向)。
题目2:桁架结构的内力分析解答:桁架结构的内力分析通常采用节点法或截面法。
以节点法为例,首先列出所有节点的平衡方程,然后解这些方程来求得节点处的反力。
接着,利用这些反力计算各杆件的内力。
题目3:框架结构的侧移和弯矩图解答:对于框架结构,侧移可以通过虚功原理或能量方法来计算。
弯矩图的绘制则需要考虑荷载作用下各层的弯矩分布。
例如,对于一个多层框架结构,在顶层施加一个均布荷载,其侧移和弯矩图会随着层数的增加而逐渐减小。
题目4:稳定性分析解答:稳定性分析主要关注结构在临界荷载作用下的失稳行为。
对于一个细长的柱体,其临界荷载可以通过欧拉公式\( P_{cr} =\frac{\pi^2EI}{(KL)^2} \)来计算,其中\( E \)是材料的弹性模量,\( I \)是截面惯性矩,\( K \)是有效长度系数,\( L \)是柱体的长度。
结论结构力学习题集的答案需要根据具体的题目条件和要求来确定。
掌握基本的力学原理和计算方法是解决这些问题的关键。
通过不断的练习和分析,可以提高解决实际工程问题的能力。
请注意,上述内容仅为示例,实际的习题集答案应根据具体的题目来编写。
如果需要针对特定题目的详细解答,请提供具体的题目信息。
第八章 矩阵位移法一、判断题:1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。
2、单元刚度矩阵均具有对称性和奇异性。
3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。
4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。
5、结构刚度方程矩阵形式为:[]{}{}K P ∆=,它是整个结构所应满足的变形条件。
6、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。
7、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。
8、等效结点荷载数值等于汇交于该结点所有固端力的代数和。
9、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。
10、矩阵位移法既能计算超静定结构,也能计算静定结构。
11、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是:(0,1,2)(0,0,0)(0,0,0)(0,1,3)(0,0,0)(1,2,0)(0,0,0)(0,0,3)(1,0,2)(0,0,0)(0,0,0)(1,0,3)(0,0,0)(0,1,2)(0,0,0)(0,3,4)A.B.C.D.2134123412341234xy M , θ( )二、计算题:12、用先处理法计算图示结构刚度矩阵的元素133322,,K K K 。
123ll4ll5EI2EIEA(0,0,0)(0,0,1)(0,2,3)(0,0,0)(0,2,4)(0,0,0)xyM ,θEI13、用先处理法计算图示刚架结构刚度矩阵的元素153422,,K K K 。
EI ,EA 均为常数。
l(0,0,1)(0,5,0)(2,3,4)l① ②123xy M , θ14、计算图示结构整体刚度矩阵的元素665544,,K K K 。
E 为常数。
l l l1342A , I AA /222A I , 2A xyM , θ15、写出图示结构以子矩阵形式表达的结构原始刚度矩阵的子矩阵[][]K K 2224,。
312①② ③ [][]k k 1112 [][]k k 2122 []k =ii iii单刚分块形式为 :4xyM , θ16、已知平面桁架单元在整体坐标系中的单元刚度矩阵,计算图示桁架结构原始刚度矩阵[]K 中的元素,,7877K K EA =常数。
,cos α=C ,sin α=S ,C C A ⋅=S S D S C B ⋅=⋅=,,各杆EA 相同。
ll1342①② ③ ④⑤ ⑥ xyx y α[]k EA l i=A B A BD B D A B D -ii---对称17、计算图示刚架结构刚度矩阵中的元素8811,K K (只考虑弯曲变形)。
设各层高度为h ,各跨长度为l h l 5.0,=,各杆EI 为常数。
xyM , θd 1d 2d 5d 6d 1d 3d 5d 7d 1d 4d 5d 818、计算图示结构原始刚度矩阵的元素4544,K K 。
2134AI Ill①②③19、用先处理法写出图示梁的整体刚度矩阵[]K 。
123llli 0123i i xyM , θ20、用先处理法写出图示梁的结构刚度矩阵[]K 。
123ll4lEI EI EI xyM , θ2321、已知图示结构在整体坐标系中的单元刚度矩阵。
用先处理法集成结构刚度矩阵[]K 。
(用子块形式写出)。
31245①③②④[][]k k 1112 [][]k k 2122 []k =ii iii单刚分块形式为 :22、用先处理法写出图示结构的结构刚度矩阵[]K 。
E =常数。
ll(0,0,0)(0,0,3)(0,1,2)I2PM I 132xy M , θ23、用先处理法写出图示刚架的结构刚度矩阵[]K ,只考虑弯曲变形。
EI EI EIEI=o ol llxyM , θ24、用先处理法写出图示结构的结构刚度矩阵[]K 。
各杆长度为l ,EA 、EI 为常数。
ABCDxyM , θ25、用先处理法写出图示结构的结构刚度矩阵[]K 。
各杆长度为 l 。
A BCD EA EIEI2xyM , θ26、用先处理法写出以子块表示的图示结构的结构刚度矩阵[]K 。
1234m 612m① ②③27、用先处理法写出图示桁架的结构刚度矩阵[]K 。
已知各杆EA =常数。
[][]kkEA l ①②==--⎡⎣⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥1010000010100000,整体坐标系中的单元刚度矩阵:[]k EA l ③=--------⎡⎣⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥241111111111111111123ll ①②③xy28、用先处理法写出图示刚架结构刚度矩阵[]K 。
已知:[][][]k k k ①②③===⨯--------⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥103000030000012300123003010003050300003000001230012300305003010041234①②③xy M , θ29、计算图示结构结点3的等效结点荷载列阵{}P 3E 。
124m 4kNm52m2364m43kN/m4kNxyM , θ30、计算图示结构结点2的等效结点荷载列阵{}P 2E 。
124l /2l qql3l /2① ②③ qxy M , θ31、计算图示结构结点2的等效结点荷载列阵{}P 2E 。
l /2lqlq l /2l123① ② ③ xy M , θ432、计算图示结构的综合结点荷载列阵{}P 。
l /2l /2l /2l /2lql (0,0,1)(0,0,2)(0,0,3)(0,0,4)q q l(0,0,0)ql 2ql xyM , θ0123433、计算图示连续梁对应于自由结点位移的荷载列阵{}P 。
l /2l Pql /21M2P3xy M , θ34、计算图示连续梁对应于自由结点位移的荷载列阵{}P 。
10kN124m3m3m 4m 436kN/m20kN xy M , θ35、用先处理法计算图示连续梁的结点荷载列阵{}P 。
2kNm4m412kN/m m44kN2EI EI EI 5kN m .xyM , θ36、计算图示结构的综合结点荷载列阵元素431,,P P P 。
ql(0,0,4)ll /2(0,0,0)l /2(1,2,3)l (0,5,6)12ql 234xyM , θq37、用先处理法计算图示结构的综合结点荷载列阵{}P 。
qlll /21l /2q23xyM , θql 238、计算图示结构结点荷载列阵中的元素654,,P P P 。
qll /2l /2l(0,0,0)(0,0,0)(4,5,6)(0,7,8)(1,2,3)qql13425xy M , θ39、计算图示结构综合结点荷载列阵中的元素431,,P P P 。
P ll /2(0,0,1)l /2q(2,3,4)(0,0,0)P 1P 23Mxy M , θ40、计算图示结构综合结点荷载列阵{}P 中的元素9873,,,P P P P 。
l lqq llql1ql 23452ql 2xy M , θ41、计算图示刚架对应于自由结点位移的综合结点荷载列阵{}P 。
10kN m3m33kN/m24kNm412345kN xy M , θ42、计算图示刚架对应自由结点位移的综合结点荷载列阵{}P 。
各杆长度为 4m 。
10kN 3kN/m123410kN3kN/mq5xy M , θ43、计算图示结构结点2的综合结点荷载列阵{}P 2。
124l /2l P Pl /2l PP 3/2l /2xy M , θPl44、计算图示刚架考虑弯曲、轴向变形时的综合结点荷载列阵{}P 。
8kN7kN m5kN 12342kN.10kN m .EI=EI,EA o o EA=o oEI,EA xy M , θ45、若考虑弯曲、轴向变形,用先处理法写出图示结构综合结点荷载列阵{}P 。
qll 421/2l 2lqlq3/2l ①② ③ql2xy M , θ46、考虑弯曲、轴向变形,计算图示结构综合结点荷载列阵{}P 。
m 214m32m2m320kN 12kN/m10kN m .40kN①②xyM , θ47、考虑弯曲、轴向变形时,用先处理法计算图示结构综合结点荷载列阵{}P 。
kN 2.58kNm/m 4.8m3521 2.5m6kN 2kN 5kN m.①②xy M , θ48、用先处理法计算图示结构的综合结点荷载列阵{}P 。
/2l P3214q/2l ll①② ③xyM , θ49、用先处理法计算图示桁架的综合结点荷载列阵{}P 。
m10k N3m4xy M , θ50、计算图示结构的自由结点荷载列阵{}P 。
1220kN8m6m30kN10kN40kN34xyM , θ51、计算图示结构中杆12的杆端力列阵中的第6个元素。
已知杆12的杆端位移列阵为{}[]δ120=---- 0 0.3257 0.0305 0.1616 0.1667T。
1m0.5m1m13421kN/mEA =1kNEI=1kN m.2xy M , θ52、计算杆14的轴力。
已知图示桁架EA =1kN ,结点位移列阵为:{}[]∆=--01726504007 0 2.5677 0.0415 1.0415 1.3673 1.6092 1.6408 0 1.2084 T..。
1m1kN1m1m135246xy M , θ1kN53、计算杆23的杆端力列阵的第2个元素。
已知图示结构结点位移列阵为:{}[]∆=0 0 0 -0.1569 -0.2338 0.4232 0 0 0T 。
123m 11kN/m1kNm0.5EA=1kNEI=1kN m.m0.51kN m.xyM , θ54、计算图示结构中杆34的杆端力列阵中的第3个元素和第6个元素。
不计杆件的轴向变形。
已知图示结构结点位移列阵为:{}[]∆=---0 0 0 0.2 0 0.1333 0.2 0.2 0.3333 0 0.3667 0 0.7556 0.2 0.6667T 。
1m3541m12(0,0,0)A=I=A=I=1kN A=I=A=I=1m1m=1kN/m 2A I ( m )2( m )41.5112E xyM , θ55、已知图示桁架的结点位移列阵(分别为结点2、4沿x 、y 方向位移)为:{}∆=(/())1EA ×[]342322. 1139.555 137.680 1167.111T ---,设各杆EA 为常数。
计算单元①的内力。
1240kN4m3m60kN20kN40kN3xyM,θ4①④③⑤②56、已知图示桁架杆件①的单元刚度矩阵为式(a),又已知各结点位移为式(b),则杆件①的轴力(注明拉力或压力)应为N①=。