球机自动跟踪设置与配置-技术类
- 格式:ppt
- 大小:8.48 MB
- 文档页数:19
一、以下调试步骤能让你快速掌握通过硬盘录像机来实现高速球各功能的操作;二、系统连接1、高速球的控制信号和视频信号线均接到硬盘录像机背面的端子,其中高速球控制线接硬盘录像机的T+和T-,视频线接video1-video16。
2、监视器接入硬盘录像机的VOUT口。
3、给高速球,硬盘录像机和监视器插上电源三、实际操作1、操作前需对录像机的协议、地址、波特率这几个参数进行设置,设置成和高速球的参数一致;已经设置好了协议为PELCO-D,波特率2400,解码器地址地址为1,对应的通道二地址为2;而硬盘录像机通道一对应的高速球。
2、设置好DVR和球机各参数都后,我们就可以控制高速球转动了;DVR自带遥控器,由于使用遥控器操作DVR和球机是十分方便的;下面介绍一下如何使用遥控器操作。
2-1、将遥控器对着DVR,按遥控器"设备"+"88"+"确认"键,输入完成后DVR面板上的"状态"指示灯亮起,现在就可以用遥控器控制DVR了。
2-2、按遥控器的数字键选择对应的通道画面,按主菜单键可进系统菜单设置各项参数。
2-3、如监视器显示多个画面时,为预览模式。
这个时候无法控制球机工作,需要按云镜控制进入云台控制模式即可控制智能球工作。
2-4、进入控制模式后可控制智能球上下左右以及变倍工作,需要强调的是海康DVR对高速球机左右设计的是左右方向键按下的频率低,球机速度就慢。
如果要球机速度快起来,就需要连续的按对应的左右方向键盘。
2-5、设置预置位:按主菜单键,选择解码器-确认-预置点-设定-确认,出来一个新的画面,按方向键选调整,选调整之后,所有设置菜单消失,此时可用遥控器方向键和变倍来选择一个监控目标来当预置位,当选好目标之后,按遥控器确认键回到调整菜单画面;按遥控器方向键选预置点,在预置点菜单上输入1~128任意数字代表数字,当注意如果是1,则需要输入001,按完之后按确认,在选保存+确认,则此时当前画面就设置成了预置位。
枪球联动跟踪配置说明枪球联动配置说明枪球联动功能主要用于目标较少的平面和开放场景。
在枪机检测到移动目标后,球机可以放大倍率以清楚地看到目标的细节。
设置枪球联动环境时,应注意枪机与球机之间的距离尽可能在1m以内,否则会影响校准精度。
同时,在选择枪的镜头时,尽量确保枪图片的大小与1倍放大的球机的大小相似,这便于校准。
配置需要使用特殊的4200客户端。
主要配置过程分为三个步骤:一个是登录到球机,另一个是校准,第三个是开始跟踪。
以下是一个逐步的描述1.登录球机目前,IPC在5.3.3版中增加了枪球连杆功能。
4200客户端也开始支持5.3.3版中的枪球连杆配置。
目前,该版本尚未发布,测试过程中使用的4200客户端可以临时使用。
首先,将枪和所需的联动球机添加到4200,进入主预览界面,右键点击枪屏,选择远程配置->高级配置->主从跟踪,如下图所示然后依次在4个登录框中登录球机ip,登录球机的数量最大为4个,目前系统可以支持1-4球的联动2.校准标定分为手动标定和自动标定两种方式,手动标定的标定效果比较准确,自动标定效果相比没有手动标定的效果好,但是配置方便,建议现场先使用自动标定,若效果达不到要求在使用手动标定。
(1)自动标定当采用自动校准时,请将球机的屏幕加倍,并调整球机的角度,使球机的屏幕与枪机的屏幕基本一致(双击球机的单个屏幕)点击“应用”,10s左右时间在球机画面左下角会提示标定是否成功。
标定成功后,在调整球机的角度和倍率,放大到合适的位置后点击“设置跟踪倍率”,这时设备会将该倍率系数保存,由于自动调节不同位置的倍率大小。
(注:点击完“设置跟踪倍率”后不要在点击“应用”了,否则会将之前的标定数据覆盖)(2)手动校准手动标定需要有六个标定点,在1-6个坐标的位置点击一下,在点击““,将在IPC中画面上出现相应的蓝色的标定点,标定点的初始位置均在画面中心。
开始标定时,先将六个将所有校准点添加到屏幕上,将其中一个校准点拉到一个位置,然后调整球机屏幕,将造球机的中心对准同一位置(校准时,请将球机放大倍数拉至一倍。
一种球机自动跟踪目标的方法Developing a method for a ball machine to automatically track targets is a complex task that involves a mix of technology, algorithms, and precise control mechanisms. The first and most crucial step in creating such a system is to integrate sensory technology that can detect and identify the target object accurately. This could involve using sensors like cameras, infrared sensors, or radar systems to track the movement and location of the target in real-time. These sensors must be able to capture data quickly and accurately to ensure smooth tracking of the target.研发一种球机自动跟踪目标的方法是一项复杂的任务,涉及技术、算法和精密控制机制的结合。
创建这样一个系统的第一步是整合能够准确检测和识别目标对象的传感技术。
这可能涉及使用摄像头、红外传感器或雷达系统等传感器跟踪目标的移动和位置实时数据。
这些传感器必须能够快速、准确地捕捉数据,以确保对目标的平滑跟踪。
In addition to sensors, the tracking system would require sophisticated algorithms to process the data collected and determine the actions needed to adjust the ball machine's position andorientation. These algorithms must be able to analyze the target's movement patterns, predict its future trajectory, and calculate the optimal path for the ball machine to follow. This process involves a combination of data processing, mathematical calculations, and decision-making to ensure the ball machine can accurately track the target in real-time.除了传感器外,跟踪系统还需要复杂的算法来处理收集的数据,并确定需要调整球机位置和方向的操作。
.球形摄像机使用说明书V1.0版本简体中文板.目录目录 (1)第1章产品概述 (3)1. 1产品简介 (3)1. 2性能特点 (3)1. 3 功能说明 (4)1. 4 技术参数 (7)第2章球形摄像机的基本操作 (9)第3章菜单的设置 (11)3. 1 主菜单 (12)3. 2系统信息菜单 (13)3. 3 显示设置菜单 (14)3.3.1显示信息设置菜单 (14)3.3.2标志位置菜单 (15)3. 4 球机设置1菜单 (16)3.4.1球机设置1菜单 (16)3.4.2镜头设置菜单 (17)3.4.2.1自动曝光控制菜单 (18)3.4.2.2其它菜单 (21)3.4.3云台设置菜单 (24)3.4.3.1 设置区域扫描范围的操作 (25)3.4.3.2 清除区域扫描范围的操作 (26)3.4.3.3 设置手动限位操作 (27)3.4.3.4设置水平方位角为0度操作 (28)3.4.3.5清除0度水平方位角操作 (28)3.5上电设置菜单 (29)3.6预置点设置菜单 (30)3.6.1编辑预置点标题 (30)3.6.2编辑预置点位置 (33)13.6.3清除此预置点设置 (33)3.7花样扫描菜单 (34)3.7.1花样扫描设置 (35)3.7.2清除此花样扫描路线 (35)3.8区域设置菜单 (36)3.8.1編輯区域标题 (37)3.8.2编辑区域 (37)3.8.3打开和关闭此区域 (38)3.8.4清除此区域标题 (38)3. 9 清除设置菜单 (39)3. 10 球机设置2菜单 (40)3.10.1 球机设置2菜单 (40)3.10.2报警输入设置菜单 (40)3.10.3 报警设置菜单 (41)3.10.4清除报警设置 (43)3.10.5 报警输出设置 (43)3.10.6 密码设置菜单 (44)3.10.7 密码输入菜单 (45)3.10.7 屏幕遮挡菜单 (46)3.10.8 屏幕遮挡设置菜单 (47)3.10.9 编辑屏幕遮挡区域菜单 (48)3.10.10 编辑屏幕遮挡放大倍数菜单 (49)3.10.11 加热控制菜单 (50)3.10.12 巡航设置菜单 (51)3.10.13跟踪控制菜单 (52)3.10.14跟踪区域控制菜单 (54)3.11 球机标题菜单 (55)3.12 语言选择 (55)附录一型号说明 (56)2第1章产品概述1. 1产品简介VT系列球形摄像机是采用当今最新的科技成果、最精尖的制造工艺;综合多年的宝贵经验研制成功的,配置了自动变焦镜头的高性能数字信号处理(DSP)CCD;集内置云台和数字解码器于一体,代表新一代高技术监控产品的发展潮流。
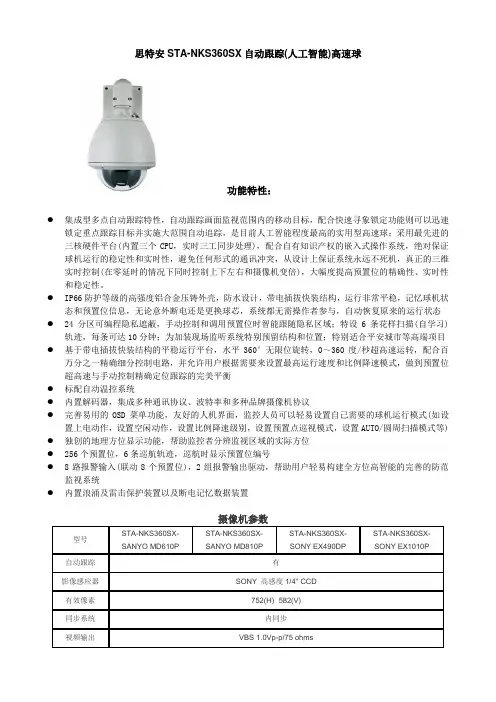
思特安STA-NKS360SX自动跟踪(人工智能)高速球功能特性:●集成型多点自动跟踪特性,自动跟踪画面监视范围内的移动目标,配合快速寻象锁定功能则可以迅速锁定重点跟踪目标并实施大范围自动追踪,是目前人工智能程度最高的实用型高速球;采用最先进的三核硬件平台(内置三个CPU,实时三工同步处理),配合自有知识产权的嵌入式操作系统,绝对保证球机运行的稳定性和实时性,避免任何形式的通讯冲突,从设计上保证系统永远不死机,真正的三维实时控制(在零延时的情况下同时控制上下左右和摄像机变倍),大幅度提高预置位的精确性、实时性和稳定性。
●IP66防护等级的高强度铝合金压铸外壳,防水设计,带电插拔快装结构,运行非常平稳,记忆球机状态和预置位信息,无论意外断电还是更换球芯,系统都无需操作者参与,自动恢复原来的运行状态●24分区可编程隐私遮蔽,手动控制和调用预置位时智能跟随隐私区域;特设6条花样扫描(自学习)轨迹,每条可达10分钟;为加装现场监听系统特别预留结构和位置;特别适合平安城市等高端项目●基于带电插拔快装结构的平稳运行平台,水平360°无限位旋转,0~360度/秒超高速运转,配合百万分之一精确细分控制电路,并允许用户根据需要来设置最高运行速度和比例降速模式,做到预置位超高速与手动控制精确定位跟踪的完美平衡●标配自动温控系统●内置解码器,集成多种通讯协议、波特率和多种品牌摄像机协议●完善易用的OSD菜单功能,友好的人机界面,监控人员可以轻易设置自己需要的球机运行模式(如设置上电动作,设置空闲动作,设置比例降速级别,设置预置点巡视模式,设置AUTO/圆周扫描模式等) ●独创的地理方位显示功能,帮助监控者分辨监视区域的实际方位●256个预置位,6条巡航轨迹,巡航时显示预置位编号●8路报警输入(联动8个预置位),2组报警输出驱动,帮助用户轻易构建全方位高智能的完善的防范监视系统●内置浪涌及雷击保护装置以及断电记忆数据装置。
威马克自动跟踪摄像机的锁定跟踪可设定为手动锁定和移动自动锁定。
手动锁定跟踪通过鼠标在屏幕上对跟踪目标点击或者画一个框,就锁定跟踪该目标。
无论该目标运动或静止,都始终如一地对其进行自动跟踪,跟踪快速而且流畅。
即使在屏幕上出现多个移动物体,自动跟踪球机也不会对其进行跟踪。
该功能适用于复杂环境下的治安监控。
例如,抓小偷。
若在监控画面上发现一个小偷在行窃,只要对该小偷图像点击或者画一个框,进行手动锁定,球机就会只跟踪小偷,而不会去跟踪被扒窃的受害者,有利于及时得知小偷去向,为顺利抓捕争取有利时机。
而移动自动锁定跟踪则自动跟踪第一个移动目标,即谁先动就跟谁。
若第一个移动目标停下来,有第二个目标移动,就会自动跟踪第二个移动目标,跟踪快速而流畅。
该功能适用于无人值守场合,如金库、军火库、电站等重要场所。
1.概述22.需求分析32.1 主动红外报警系统的存在以下的问题42.2智能视觉监控系统的优势43.应用场景74.系统介绍74.1系统架构84.2系统组成:84.3系统特点94.4智能功能94.5智能监控管理平台介绍11实时监控功能11管理配置功能11报警联动功能124.6系统清单124.7主要产品性能参数介绍13网络高清红外跟踪球机13网络高清跟踪球17网络标清跟踪球245.应用案例296.考前须知29周界防范应用引导方案6.1摄像机安装条件:296.2场景选择要求:306.3不适合做智能视频分析的场景301.概述随着国家经济的提高,城市和城市化进程在不断的开展,各种社会矛盾和暴力事件逐渐增多,政府和相关局部对加强城市各地联网型监控系统越来越重视,当前城市和小区监控系统建立使用监控录像存储,事件发生后调取查阅的方式,这种方式在一定程度上满足了社会的需求,但是无法防止事态趋于恶化.传统的视频监控系统存在以下几方面的问题:⏹监控时间:视频监控系统在大局部情况下,视频源的视频画面并没有被平安人员看到,很可能在这些时间就有值得注意的异常现象出现。
人不可能24小时不连续的盯着监视器,研究说明,人连续监视*个画面22分钟以后,会丧失90%以上的画面信息。
⏹数据分析困难:传统视频监控系统缺乏智能因素,需要24小时完整的录像,占用大量磁盘存储空间,而且录像数据无法被有效的分类存储,最多只能打上时间标签,数据分析工作变得非常耗时,很难获得全部的相关信息。
⏹被动监控:目前的监控系统大局部情况下都仅起到一个"录像〞的工作,即将一段时间的视频源使用DVR录制下来,异常情况甚至于突发事故已经发生之后,再进展事后的查验,但此时损失和影响已经造成,无法挽回,完全是一种"亡羊补牢〞式的"被动监控〞。
现阶段行业周界报警器材及系统主要有以下几种:⏹主动红外报警系统⏹微波墙式报警系统⏹智能视觉监控系统⏹电子围栏报警系统智能视频〔IV,Intelligent Video〕源自计算机视觉〔CV,puter Vision〕技术。
海康网络球机设置方法海康网络球机是一款高清晰度、智能化的监控设备,具备远程监控和控制功能,适用于各种室内外环境。
在设置海康网络球机之前,首先需要确保网络环境正常,并具备以下条件:1. 网络设备:路由器、交换机等网络设备。
2. 电脑:连接网络且具备网络访问权限的电脑。
3. 海康网络球机:摄像头需要与网络设备相连,通过网线连接到交换机或路由器。
以下是海康网络球机设置步骤的详细说明:1. 网络环境搭建a. 确保网络连接畅通,可以正常访问互联网。
b. 将网络球机连接到交换机或路由器,确保摄像头的电源供应正常。
2. 网络设置a. 打开电脑浏览器,输入默认的摄像头IP地址,例如192.168.1.64。
b. 输入默认用户名和密码进行登录,默认用户名为admin,密码为空。
c. 登录成功后,进入网络配置界面。
d. 在网络配置界面中,进行IP地址的设置。
可以选择动态IP或静态IP,一般推荐使用静态IP。
e. 设置完毕后,保存设置,摄像头将重启并应用新的网络配置。
此时,需要重新登录。
3. 视频设置a. 使用同样的方式登录到摄像头的设置界面。
b. 进入视频配置界面,可以设置视频参数、分辨率等。
c. 根据实际需求和摄像头性能,进行视频设置调整。
一般情况下,默认设置已经满足大部分应用需求。
d. 保存设置,摄像头将重启并应用新的视频配置。
4. 远程访问设置a. 在摄像头设置界面中,进入网络服务配置,开启远程访问功能。
b. 设置端口号,一般推荐使用默认端口号80。
c. 设置完毕后,保存设置,摄像头将重启并应用新的远程访问配置。
5. 视频流配置a. 进入摄像头设置界面,找到视频流配置,选择编码格式和视频质量。
b. 根据实际需求,设置合适的码流参数和帧率。
c. 保存设置后,摄像头将会应用新的视频流配置。
6. 远程访问和控制a. 在电脑浏览器中输入摄像头的IP地址,登陆摄像头界面。
b. 在摄像头界面中,可以进行实时监视、录像和回放等操作。
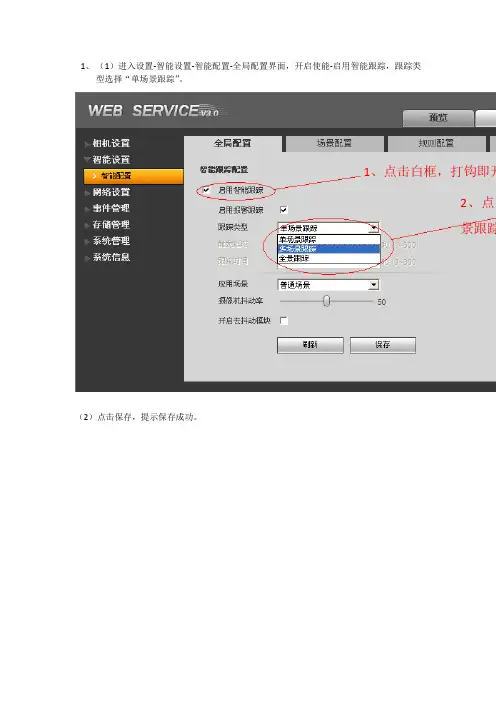
1、(1)进入设置-智能设置-智能配置-全局配置界面,开启使能-启用智能跟踪,跟踪类
型选择“单场景跟踪”。
(2)点击保存,提示保存成功。
1、点击白框,打钩即开
2、点击
景跟踪
3、
2、(1)进入场景配置界面,通过调节方向和变倍选择合适的场景,点击添加场景按钮,
即添加当前场景为设置场景。
5、调节远近
4、调节方向
(2)鼠标移动至场景名称处,设置场景名称;
(3)同样的,可以设置跟踪时间。
(4)点击保存,提示保存成功。
9、点击保存3、(1)进入规则配置界面,选择所设置的跟踪场景,点击添加规则。
添加的(2)鼠标移动至规则类型位置,选择合适的规则类型。
(3)点击绘制,在场景内绘制规则图,并且设置规则属性。
提示绘制完成
13、鼠
标左键
标右键
14、
(4)点击保存,提示保存成功。
15、点击保存4、(1)进入参数配置界面,选择对应的场景,添加排除区域。
检测
17、点击“添加排除区”
(2)点击保存,提示保存成功。
19、点击保
注释:1、如果在设置智能跟踪球之前,进入过任何非智能
跟踪球界面,需要删除控件后,重新下载。
2、设置智能跟踪球之前,最好先对云台和web进行
恢复默认。
3、如有设置完成后,预览界面无法显示智能规则的
情况,(1)请检查是否开启外部报警(需关闭);
(2)请检查规则布防时间段是否设置正确。
球形摄像机使用说明书V1.0版本简体中文板. . .. 目录目录 (1)第1章产品概述 (3)1. 1产品简介 (3)1. 2性能特点 (3)1. 3 功能说明 (4)1. 4 技术参数 (7)第2章球形摄像机的基本操作 (9)第3章菜单的设置 (11)3. 1 主菜单 (12)3. 2系统信息菜单 (13)3. 3 显示设置菜单 (13)3.3.1显示信息设置菜单 (13)3.3.2标志位置菜单 (14)3. 4 球机设置1菜单 (15)3.4.1球机设置1菜单 (15)3.4.2镜头设置菜单 (16)3.4.2.1自动曝光控制菜单 (17)3.4.2.2其它菜单 (19)3.4.3云台设置菜单 (21)3.4.3.1 设置区域扫描围的操作 (22)3.4.3.2 清除区域扫描围的操作 (23)3.4.3.3 设置手动限位操作 (24)3.4.3.4设置水平方位角为0度操作 (24)3.4.3.5清除0度水平方位角操作 (24)3.5上电设置菜单 (25)3.6预置点设置菜单 (25)3.6.1编辑预置点标题 (26)3.6.2编辑预置点位置 (28). . .. 3.6.3清除此预置点设置 (28)3.7花样扫描菜单 (29)3.7.1花样扫描设置 (29)3.7.2清除此花样扫描路线 (30)3.8区域设置菜单 (30)3.8.1編輯区域标题 (31)3.8.2编辑区域 (31)3.8.3打开和关闭此区域 (31)3.8.4清除此区域标题 (32)3. 9 清除设置菜单 (32)3. 10 球机设置2菜单 (33)3.10.1 球机设置2菜单 (33)3.10.2报警输入设置菜单 (33)3.10.3 报警设置菜单 (34)3.10.4清除报警设置 (35)3.10.5 报警输出设置 (35)3.10.6 密码设置菜单 (36)3.10.7 密码输入菜单 (37)3.10.7 屏幕遮挡菜单 (37)3.10.8 屏幕遮挡设置菜单 (38)3.10.9 编辑屏幕遮挡区域菜单 (39)3.10.10 编辑屏幕遮挡放大倍数菜单 (40)3.10.11 加热控制菜单 (40)3.10.12 巡航设置菜单 (41)3.10.13跟踪控制菜单 (42)3.10.14跟踪区域控制菜单 (43)3.11 球机标题菜单 (44)3.12 语言选择 (44)附录一型号说明 (45)第1章产品概述1. 1产品简介VT系列球形摄像机是采用当今最新的科技成果、最精尖的制造工艺;综合多年的宝贵经验研制成功的,配置了自动变焦镜头的高性能数字信号处理(DSP)CCD;集置云台和数字解码器于一体,代表新一代高技术监控产品的发展潮流。
自动跟踪网络高速球摄像机一、产品描述:NS4100T为优迪数码智能跟踪高速球球网络摄像机,基于优迪NF042M编码模块组装集成,产品工艺先进、结构严谨、接口丰富,是一款性能卓越的工业级网络摄像机产品。
可用于室内和室外(加防水罩)监控的一体化智能视觉自动跟踪和视频分析,它提供大范围的智能视觉监控,具有全方位旋转和18/36 倍光学变倍能力的自主智能跟踪(AUTO PTZ)、场景威胁检测和自动报警事件响应等功能。
二、产品图片:三、产品型号:NS4100T四、功能特性:• 内置嵌入式自动跟踪智能分析• 162/234倍变焦(光学18/26倍,数码9倍)• H.264 编码25/30帧率@D1, 双向语音•视频压缩: H.264, MPEG-4, MJPEG 可选•日&夜(IR-CUT滤光切换), DSS•支持DSP抗锯齿•支持视频字符叠加,移动侦测•提供SDK开发包和配套应用软件•以世界上最安静的速度隐身旋转•球机系统旋转精度达0.024度与1/8微步•可以自由的控制球机运动速度和角度•坚固可靠的材料•在RS485端子上实现电源极性保护•NS4100T是室内外AUTO PTZ相机•可以自定义规则,用自己定义的VCA规则来触发(例如:定义只有徘徊的人才跟踪或者只有进入了某个特定区域才跟踪或者在某个地方逗留超过多长时间才跟踪等等)•支持手动选择,只需在屏幕上双击VCA显示的目标,就会自动对所选目标追踪•.用户可以设置,在自动追踪的时候,屏蔽或允许用户对高速球的控制•.用户可以设置,在结束自动追踪以后,高速球是否自动回到初始位置五、触发规则跟踪模式:VCA自动检测支持以下几种配置模式:1、绊线穿越检测模式——自动检测单向或双向穿越单条或多条绊线的行为,针对每一条绊线的检测还可以指定穿越绊线的非法方向(两个单向或者双向)。
2、围栏入侵检测模式——自动检测单向或双向穿越直线或多线段的围栏线的行为(包括从围栏下面爬过、围栏缝隙中间穿越和从围栏上方攀越),可以指定穿越围栏的非法方向(两个单向或者双向)。
跟踪功能简介:1.巡航跟踪,用户可预先设置好几个预置点,然后调用97号预置点,执行巡航跟踪,即预置点巡航。
巡航期间有动态目标出现,球机就自动开启跟踪功能。
若没有动态目标出现,球机就走常规预置点巡航。
该功能可设20个这样的预置点,并且各个预置点可以同时参与巡航。
2.到预置位跟踪,用户可预先选择好场景,设置好预置点,然后调用该预置点,球机会立刻定位到该预置点下,并且开启跟踪功能。
该功能共有7个预置点可设,63~69号预置点。
例如,某位置(场景)下设63号预置点,然后调用63号预置点,此时无论球机在哪个位置,都会立刻到63号预置点位置,并且自动开启跟踪。
3.直接启动跟踪,调用80号预置点,手动开启球机跟踪功能。
(一般用做调试测试跟踪功能)进跟踪设置菜单操作:调用95号预置点,进球机菜单,摇动摇杆,选择跟踪设置,按光圈键确认,进入,弹出以下菜单。
跟踪设置跟踪设置菜单:菜单说明放大倍数联动:分2种模式,一种是关闭模式(关),一种是倍数模式(1~20),关闭模式启用后,球机停留在当前倍数状态下跟踪,此时镜头倍数不再受目标远近而发生变化;倍数模式对应的值表示跟踪目标时,根据目标的远近,镜头拉动最高可变的倍数。
例如,如果选择“1”那么跟踪时无论目标远近,只能在1倍状态;选择“5”那么根据跟踪时目标的远近,镜头可在1~5倍下变动。
操作人员可以根据现实状态自行设置。
放大倍数联动值最低设1倍,常规镜头最高可设20倍,索尼三星等高端镜头最高设镜头所能支持的最高倍数,例如索尼26X镜头,放大倍数联动设置项为1~26,默认为10。
目标尺寸:表示被侦测的移动目标在屏幕中所占比例的大小,注意,跟实际物体的大小无关,该设置项可以分小,中,大三个选项,默认为“中”。
启动跟踪模式后,有无运动目标判断的标准与运动物体图像所占监控屏幕中的比例大小有关,目标尺寸设置为小,中,大,分别对应运动物体图像在监控屏幕中所占的比例大于或等于1/7,1/6,1/5,只有达到这个比例,球机才会判断监控画面中有运动目标。
球机说明书球机说明书1. 产品简介球机(PTZ摄像机)是一种具有水平、垂直和变焦功能的摄像机,通常用于监控系统中。
它通过机械装置和电子技术实现远程控制和全方位监控。
本说明书将详细介绍球机的特点、技术规格以及操作相关的注意事项。
2. 产品特点球机作为一种高级监控摄像机,具有以下主要特点:2.1 全方位监控球机通过可调控的转动机构,能够实现水平和垂直方向的360度无死角的监控。
用户可以自由调整摄像机拍摄角度,覆盖更广的区域,实现更全面的监控。
2.2 远程控制球机可通过远程控制系统实现远程控制,用户可以通过监控中心或手机应用对球机进行远程控制。
具备云台控制功能,可以通过远程操作来调整球机的方向、变焦倍率等参数。
2.3 高清画质球机具备高清视频拍摄能力,能够提供清晰、细腻的画质。
一般支持720P、1080P或更高分辨率,让用户能够清晰地观看监控画面。
2.4 夜视功能球机通常配备红外夜视功能,可在低照度环境下提供清晰可见的画面。
夜视功能可以有效提升摄像机的监控效果,确保全天候监控。
2.5 自动追踪球机还具备智能自动追踪功能,能够根据目标的移动实时进行跟踪,确保重点目标不会被丢失。
这种功能在需要对特定区域进行重点监控时非常有用。
3. 技术规格以下是球机的技术规格:- 分辨率:720P、1080P或更高- 感光元件:CMOS或CCD- 镜头变焦倍数:光学变焦和数字变焦- 夜视距离:通常为20米至50米- 旋转范围:水平360度,垂直大约为90度至180度- 通信接口:支持网络接口(如Ethernet接口)和串口接口(如RS485)- 防护等级:通常为IP66,适用于室内和室外的安装环境- 工作温度:通常为-10摄氏度至60摄氏度- 供电方式:一般支持直流12V或PoE(Power over Ethernet)4. 使用说明在使用球机时,请注意以下事项:4.1 安装位置对于球机的安装位置,建议选择能够提供最佳视野范围的位置。
海康球机设置方法海康球机是一种广泛应用于监控领域的安防设备,具有远程控制、高清拍摄、自动对焦等功能。
下面将详细介绍海康球机的设置方法。
1. 网络设置:海康球机需要连接到网络才能实现远程监控。
首先,将球机与路由器进行有线连接,确保网络通畅。
然后,通过海康球机自带的配置软件或者浏览器输入球机的IP地址进入管理界面。
在管理界面中点击网络设置,配置球机的IP地址、子网掩码、网关和DNS服务器等信息。
设置完成后保存并重启球机,确保设置生效。
2. 用户设置:海康球机支持多用户管理,在管理界面中点击用户设置,可以添加、编辑和删除用户。
每个用户可以设置不同的权限,例如观看视频、云台控制、录像回放等。
为了安全起见,建议设置一个管理员用户,拥有最高权限。
3. 基本配置:在管理界面中点击基本配置,可以对海康球机的基本参数进行设置。
首先是时间配置,设置球机的时间和日期,可以选择手动设置或者与网路时间同步。
其次是图像配置,可以调整亮度、对比度、饱和度等参数,以获得最佳的图像效果。
另外,还可以设置语言、视频制式、镜头类型等。
4. 视频配置:点击视频配置可以对海康球机的视频参数进行设置。
首先是分辨率设置,可以选择不同的分辨率以适应不同的监控需求。
然后是图像质量设置,可以调整视频的压缩比例和码率,以平衡视频质量和存储空间的占用。
另外,还可以设置编码类型、编码模式、帧率等。
5. 云台控制:海康球机支持云台控制,可以通过鼠标、键盘或者手机远程控制球机的云台运动。
在管理界面中点击云台控制,可以设置云台的速度、灵敏度和自动巡航等。
另外,还可以设置预置位,将云台调整到预先设置好的位置。
6. 告警设置:海康球机支持告警功能,当监控区域出现异常时可以自动发送告警信息。
在管理界面中点击告警设置,可以设置告警类型、告警参数和告警动作。
例如,当监测到某个区域有移动物体时,可以触发告警并将告警信息发送给指定的用户。
7. 录像设置:海康球机支持录像功能,可以将监控的视频实时录制下来。