iw3620 24V300mA LED driver test report
- 格式:pdf
- 大小:400.62 KB
- 文档页数:13
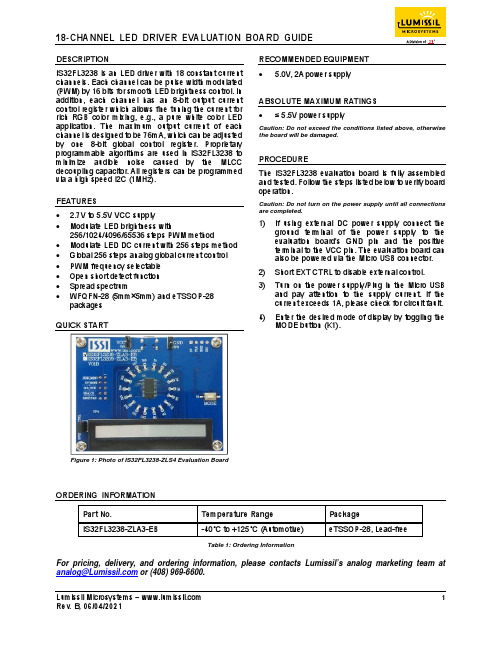
DESCRIPTIONIS32FL3238 is an LED driver with 18 constant current channels. Each channel can be pulse width modulated (PWM) by 16 bits for smooth LED brightness control. In addition, each channel has an 8-bit output current control register which allows fine tuning the current for rich RGB color mixing, e.g., a pure white color LED application. The maximum output current of each channel is designed to be 76mA, which can be adjusted by one 8-bit global control register. Proprietary programmable algorithms are used in IS32FL3238 to minimize audible noise caused by the MLCC decoupling capacitor. All registers can be programmed via a high speed I2C (1MHz).FEATURES∙ 2.7V to 5.5V VCC supply∙Modulate LED brightness with256/1024/4096/65536 steps PWM method∙Modulate LED DC current with 256 steps method ∙Global 256 steps analog global current control∙PWM frequency selectable∙Open short detect function∙Spread spectrum∙WFQFN-28 (5mm×5mm) and eTSSOP-28 packagesQUICK STARTFigure 1: Photo of IS32FL3238-ZLS4 Evaluation Board RECOMMENDED EQUIPMENT∙ 5.0V, 2A power supplyABSOLUTE MAXIMUM RATINGS∙≤ 5.5V power supplyCaution: Do not exceed the conditions listed above, otherwise the board will be damaged.PROCEDUREThe IS32FL3238 evaluation board is fully assembled and tested. Follow the steps listed below to verify board operation.Caution: Do not turn on the power supply until all connections are completed.1) If using external DC power supply connect theground terminal of the power supply to the evaluation board's GND pin and the positive terminal to the VCC pin. The evaluation board can also be powered via the Micro USB connector.2) Short EXT CTRL to disable external control.3) Turn on the power supply/Plug in the Micro USBand pay attention to the supply current. If the current exceeds 1A, please check for circuit fault.4) Enter the desired mode of display by toggling theMODE button (K1).ORDERING INFORMATIONPart No. Temperature Range PackageIS32FL3238-ZLA3-EB -40°C to +125°C (Automotive) eTSSOP-28, Lead-freeTable 1: Ordering InformationFor pricing, delivery, and ordering information, please contacts Lumissil’s analog marketing team at *******************or (408) 969-6600.EVALUATION BOARD OPERATIONThe IS32FL3238 evaluation board has six display modes. Press MODE button to switch configurations. 1) (Default mode) Two groups single color LEDschasing each other-A.2) Two groups single color LEDs chasing each other-B.3) There groups single color LEDs chasing after eachother.4) Chasing cycle.5) RGB LEDs (RGB1-RGB6) are breathing effect A-mixed color.6) RGB LEDs (RGB1-RGB6) are breathing effect B.Note: IS32FL3238 solely controls the FxLED function on the evaluation board.SOFTWARE SUPPORTEXT CTRL default setting is close circuit. If it is set to open, the on-board MCU will stop working. The I2C pins and SDB pin are set to High Impedance. External I2C and SDB signals can be connected to TP4 to controlthe IS32FL3238 LED driver.Figure 2: Photo of Arduino UNO connected to EvaluationBoardThe steps listed below are an example using the Arduino for external control.The Arduino hardware consists of an Atmel microcontroller with a bootloader allowing quick firmware updates. First download the latest Arduino Integrated Development Environment IDE (1.6.12 or greater) from /en/Main/Software . Also download the Wire.h library from /en/reference/wire and verify that pgmspace.h is in the directory …program Files(x86)/Arduino/hardware/tools/avr/avr/include/avr /. Then download the latest IS32FL3238 test firmware (sketch) from the Lumissil website /products/led-driver/fxled . 1) Open EXT CTRL.2) Connect the 5 pins from Arduino board toIS32FL3238 EVB:a) Arduino 5V pin to IS32FL3238 EVB VCC. b) Arduino GND to IS32FL3238 EVB GND. c) Arduino SDA (A4) to IS32FL3238 EVB SDA. d) Arduino SCL (A5) to IS32FL3238 EVB SCL. e) If Arduino use 3.3V MCU VCC, connect 3.3Vto IS32FL3238 EVB SDB, if Arduino use 5.0V MCU VCC, connect 5.0V or 3.3V to EVB SDB.(Arduino UNO MCU VCC is 5V, so SDB can be 5V or 3.3V) 3) Use the test code in appendix Ⅰ or download thetest firmware (sketch) from the Lumissil website, a .txt file and copy the code to Arduino IDE, compile and upload to Arduino.4) Run the Arduino code and the initial mode willchange the Blue LED brightness every second. Note: the white color LEDs cannot be controlled when the onboard STM32F103C8T6 is disabled. (Some early board we provided is still controlling the single color LED, if want to switch between single color LED and RGB, remove the U4 and connect the VCC to the LED+)Please refer to the datasheet to get more information about IS32FL3238.Figure 3: IS32FL3238 Application SchematicBILL OF MATERIALSName Symbol Description Qty Supplier Part No.LED Driver U1 18CH FxLED Driver 1 Lumissil IS32FL3238 MCU U2 Microcontroller 1 STM STM32F103C8T6 LDO U3 3.0V LDO 1 SGMICRO SGM2019-3.0YN5G PMOS U4 Dual PMOS 1 ANPEC APM4953Crystal Y1 Crystal, 8MHz 1 HLX HC-49SDiode D1~D18 Diode, LED Blue, SMD 18 Everlight 19-217/BHC-AN1P2/3TDiode D19~D24 Diode, LED RGB, SMD 6 Everlight 99-235/RSGBB7C-A22/2Dor99-235/RGBC/TR8Diode DS1 Diode, SMD 1 DIODES DFLS240 Resistor R1,R3 RES,2k,1/10W,±5%,SMD 1 Yageo RC0603JR-072KLResistor R2,R4,R6,R7,R8RES,100k,1/10W,±5%,SMD 5 Yageo RC0603JR-07100KLResistor R5 RES,3.3k,1/10W,±5%,SMD 1 Yageo RC0603JR-073K3L Resistor R9 RES,1k,1/10W,±5%,SMD 1 Yageo RC0603JR-071KL Resistor R10,R11 RES,22R,1/10W,±5%,SMD 1 Yageo RC0603JR-0722RL Resistor R12 RES,1.5k,1/10W,±5%,SMD 1 Yageo RC0603JR-071K5L Capacitor C1,C2 CAP,100nF,16V,±20%,SMD 2 Yageo CC0603MRX7R7BB104 Capacitor C3 CAP,10µF,16V,±20%,SMD 1 Yageo CC0603MRX5R7BB106 Capacitor C4,C5 CAP, 1µF,16V,±10%,SMD 2 Yageo CC0603KRX7R7BB105 Capacitor C6 CAP,10nF,16V,±10%,SMD 1 Yageo CC0603KPX7R7BB103 Capacitor C7,C8 CAP,33pF,50V,±5%,SMD 2 Yageo CQ0603JRNPO9BN360 Button K1 Button SMD 1Bill of Materials, refer to Figure 3 above.Figure 4: Board Component Placement Guide - Top LayerFigure 5: Board PCB Layout - Top LayerFigure 7: Board PCB Layout - Bottom LayerCopyright © 2021 Lumissil Microsystems. All rights reserved. Lumissil Microsystems reserves the right to make changes to this specification and its products at any time without notice. Lumissil Microsystems assumes no liability arising out of the application or use of any information, products or services described herein. Customers are advised to obtain the latest version of this device specification before relying on any published information and before placing orders for products.Lumissil Microsystems does not recommend the use of any of its products in life support applications where the failure or malfunction of the product can reasonably be expected to cause failure of the life support system or to significantly affect its safety or effectiveness. Products are not authorized for use in such applications unless Lumissil Microsystems receives written assurance to its satisfaction, that:a.) the risk of injury or damage has been minimized;b.) the user assume all such risks; andc.) potential liability of Lumissil Microsystems is adequately protected under the circumstancesREVISION HISTORYRevision Detail Information DataA Initial Release 2018.09.12B Update the BOM 2021.06.04APPENDIX Ⅰ: IS32FL3238 Arduino Test Code V01A#include<Wire.h>#include<avr/pgmspace.h>#define Addr_GND 0x68//7 bit format is 0x3Fbyte PWM_Gamma64[64]={0x00,0x01,0x02,0x03,0x04,0x05,0x06,0x07,0x08,0x09,0x0b,0x0d,0x0f,0x11,0x13,0x16,0x1a,0x1c,0x1d,0x1f,0x22,0x25,0x28,0x2e,0x34,0x38,0x3c,0x40,0x44,0x48,0x4b,0x4f,0x55,0x5a,0x5f,0x64,0x69,0x6d,0x72,0x77,0x7d,0x80,0x88,0x8d,0x94,0x9a,0xa0,0xa7,0xac,0xb0,0xb9,0xbf,0xc6,0xcb,0xcf,0xd6,0xe1,0xe9,0xed,0xf1,0xf6,0xfa,0xfe,0xff};void setup() {// put your setup code here, to run once:Wire.begin();Wire.setClock(400000);//I2C 400kHz// pinMode(4,OUTPUT);//SDB// digitalWrite(4,HIGH);//SDB_HIGH//delay(100); //keep 0.5sInit_FL3238();}void loop() {// put your main code here, to run repeatedly:// delay(50);Init_FL3238();IS32FL3238_mode1();//breath mode}void IS_IIC_WriteByte(uint8_t Dev_Add,uint8_t Reg_Add,uint8_t Reg_Dat){Wire.beginTransmission(Dev_Add/2);Wire.write(Reg_Add); // sends regaddressWire.write(Reg_Dat); // sends regaddressWire.endTransmission(); // stop transmitting}void Init_FL3238(void){uint8_t i = 0;for(i=0x4A;i<=0x6D;i++){IS_IIC_WriteByte(Addr_GND,i,0xFF);//write all scaling}IS_IIC_WriteByte(Addr_GND,0x6e,0xff);//GCCIS_IIC_WriteByte(Addr_GND,0x49,0x00);//update PWM & congtrol registersIS_IIC_WriteByte(Addr_GND,0x00,0x01);//normal operation}void IS32FL3238_mode1(void)//white LED{int i=0,j=0;for(j=0;j<=63;j++){for(i=0x01;i<=0x47;i=i+2){IS_IIC_WriteByte(Addr_GND,i, PWM_Gamma64[j]);//write all PWM set 0x80 IS_IIC_WriteByte(Addr_GND,0x49,0x00);//update PWM & congtrol registers }delay(10); //keep 0.5s}for(j=63;j>=0;j--){for(i=0x01;i<=0x47;i=i+2){IS_IIC_WriteByte(Addr_GND,i, PWM_Gamma64[j]);//write all PWM set 0x80 IS_IIC_WriteByte(Addr_GND,0x49,0x00);//update PWM & congtrol registers }delay(10); //keep 0.5s}}。


©1998 Whelen Engineering Company Inc.Form No.13322C (092501)For warranty information regarding this product, visit /warranty•Proper installation of this product requires the installer to have a good understanding of automotive electronics, systems and procedures.•Whelen Engineering requires the use of waterproof butt splices and/or connectors if that connector could be exposed to moisture.•Any holes, either created or utilized by this product, should be made both air- and watertight using a sealant recommended by your vehicle manufacturer.•Failure to use specified installation parts and/or hardware will void the product warranty.•If mounting this product requires drilling holes, the installer MUST be sure that no vehicle components or other vital parts could be damaged by the drilling process. Check both sides of the mounting surface before drilling begins. Also de-burr the holes and remove any metal shards or remnants. Install grommets into all wire passage holes.•If this manual states that this product may be mounted with suction cups, magnets, tape or Velcro®, clean the mounting surface with a 50/50 mix of isopropyl alcohol and water and dry thoroughly.•Do not install this product or route any wires in the deployment area of your air bag. Equipment mounted or located in the air bag deployment area will damage or reduce the effectiveness of the air bag, or become a projectile that could cause serious personal injury or death. Refer to your vehicle owner’s manual for the air bag deployment area. The User/Installer assumes full responsibility to determine proper mounting location, based on providing ultimate safety to all passengers inside the vehicle.•For this product to operate at optimum efficiency, a good electrical connection to chassis ground must be made. The recommendedprocedure requires the product ground wire to be connected directly to the NEGATIVE (-) battery post (this does not include products that use cigar power cords).•If this product uses a remote device for activation or control, make sure that this device is located in an area that allows both the vehicle and the device to be operated safely in any driving condition.•Do not attempt to activate or control this device in a hazardous driving situation.•This product contains either strobe light(s), halogen light(s), high-intensity LEDs or a combination of these lights. Do not stare directly into these lights. Momentary blindness and/or eye damage could result.•Use only soap and water to clean the outer lens. Use of other chemicals could result in premature lens cracking (crazing) and discoloration. Lenses in this condition have significantly reduced effectiveness and should be replaced immediately. Inspect and operate this product regularly to confirm its proper operation and mounting condition. Do not use a pressure washer to clean this product.•It is recommended that these instructions be stored in a safe place and referred to when performing maintenance and/or reinstallation of this product.•FAILURE TO FOLLOW THESE SAFETY PRECAUTIONS AND INSTRUCTIONS COULD RESULT IN DAMAGE TO THE PRODUCT OR VEHICLE AND/OR SERIOUS INJURY TO YOU AND YOUR PASSENGERS!A u t o m o t i v e : Warnings to InstallersWhelen’s emergency vehicle warning devices must be properly mounted and wired in order to be effective and safe. Read and follow all of Whelen’s written instructions when installing or using this device. Emergency vehicles are often operated under high speed stressful conditions which must be accounted for when installing all emergency warning devices. Controls should be placed within convenient reach of the operator so that they can operate the system without taking their eyes off the roadway. Emergency warning devices can require high electrical voltages and/or currents. Properly protect and use caution around live electrical connections.Grounding or shorting of electrical connections can cause high current arcing, which can cause personal injury and/or vehicle damage, including fire. Many electronic devices used in emergency vehicles can create or be affected by electromagnetic interference. Therefore, after installation of any electronic device it is necessary to test all electronic equipment simultaneously to insure that they operate free of interference from other components within the vehicle. Never power emergency warning equipment from the same circuit or share the same grounding circuit with radio communication equipment. All devices should be mounted in accordance with the manufacturer’s instructions and securely fastened to vehicle elements of sufficient strength to withstand the forces applied to the device. Driver and/or passenger air bags (SRS) will affect the way equipment should be mounted. This device should be mounted by permanent installation and within the zones specified by the vehicle manufacturer, if any. Any device mounted in the deployment area of an air bag will damage or reduce the effectiveness of the air bag and may damage or dislodge the device. Installer must be sure that this device, its mounting hardware and electrical supply wiring does not interfere with the air bag or the SRS wiring or sensors. Mounting the unit inside the vehicle by a method other than permanent installation is not recommended as unit may become dislodged during swerving; sudden braking or collision. Failure to follow instructions can result in personal injury. Whelen assumes no liability for any loss resulting from the use of this warning device. PROPER INSTALLATION COMBINED WITH OPERATOR TRAINING IN THE PROPER USE OF EMERGENCY WARNING DEVICES IS ESSENTIAL TO INSURE THE SAFETY OF EMERGENCY PERSONNEL AND THE PUBLIC.Warnings to UsersWhelen’s emergency vehicle warning devices are intended to alert other operators and pedestrians to the presence and operation of emergency vehicles and personnel. However, the use of this or any other Whelen emergency warning device does not guarantee that you will have the right-of-way or that other drivers and pedestrians will properly heed an emergency warning signal. Never assume you have the right-of-way. It is your responsibility to proceed safely before entering an intersection, driving against traffic, responding at a high rate of speed, or walking on or around traffic lanes. Emergency vehicle warning devices should be tested on a daily basis to ensure that they operate properly. When in actual use, the operator must ensure that both visual and audible warnings are not blocked by vehicle components (i.e.: open trunks or compartment doors), people, vehicles, or other obstructions. It is the user’s responsibility to understand and obey all laws regarding emergency warning devices. The user should be familiar with all applicable laws and regulations prior to the use of any emergency vehicle warning device. Whelen’s audible warning devices are designed to project sound in a forward direction away from the vehicle occupants. However, because sustained periodic exposure to loud sounds can cause hearing loss, all audible warning devices should be installed and operated in accordance with the standards established by the National Fire Protection Association.Safety FirstThis document provides all the necessary information to allow your Whelen product to be properly and safely installed. Before beginning the installation and/or operation of your new product, the installation technician and operator must read this manual completely. Important information is contained herein that could prevent serious injury or damage.Installation GuideModel 1002 12-48 Volt Strobe Beacon(Polycarbonate Base)51 Winthrop RoadChester, Connecticut 06412-0684Phone: (860) 526-9504Internet: Salese-mail:*******************CustomerServicee-mail:*******************®ENGINEERING COMPANY INC.Mounting the Unit:The Whelen 1000 Series Strobe Light Beacons have a universal mounting base that may be mounted in one of three ways. An optional magnetic mount kit may be added for those requiring a temporary warning beacon (see page 2). This strobe light was designed to be mounted in a normal “dome up”position. If mounted in an inverted position, drill a 1/8 inch diameter hole in the lowest point of the dome in order to let condensation drain.3/8 Inch Pipe Mount:1.Feed the power wires through the pipe.2.Connect the power wires to the wires from the light (see “Wiring Instructions” next page).3.Screw the strobe beacon onto the pipe, being careful not to pinch or strain the wires. Hand tighten unit onto pipe.Permanent Surface Mount:1.Using the base of the strobe light as a template, mark the location of the mounting holes and the wire access hole.The wire access hole may be located either beneath the center of the base, or the wire may be routed through the wire channel located underneath the strobe light base for surface wiring.2.Drill the starter holes for the three sheet metal mounting screws with a 7/64 inch drill. Drill the wire access hole large enough for the wires to fit through. Deburr all holes and install a rubber grommet (customer supplied) to protect the wires.3.Feed the power wires through the wire access hole in the base, and through the mounting gasket.4.Connect the power wires to the wires from the strobe light (See “Wiring Instructions” next page).5.Push the excess wires back through the wire access hole while aligning the mounting holes in the strobe light base,mounting gasket, and the mounting surface.6.Secure the strobe light head assembly to the mounting surface with the three sheet metal screws provided.Tamper Resistant Mount:Note:It will be necessary to disassemble the strobe light head assembly in order to use this mounting style.WARNING!The strobe light is a high voltage device.DO NOT TOUCH the strobe lamp assembly or the strobe power supply assembly while the unit is in operation! WAIT 10 MINUTES after turning power off before starting any work or troubleshooting.1.Using a small straight blade screwdriver, pry the dome upward at the three pockets in the base, and remove the polycarbonate optic dome taking precautions not to damage or lose the dome gasket. Remove the strobe power supply assembly from the base.Note:As you remove the power supply assembly,note (for reassembly) that the capacitor sits in a cradle within the base.ing a 3/16 inch drill, drill through the three flashed over mounting holes located around the inside of the base.3.Using the base as a template, mark the location of the mounting holes and wire access hole onto the mounting surface.4.Drill the starter holes for the three mounting screws with a 7/64 inch drill. Drill the wire access hole large enough for the wires to fit through. Deburr all holes and install a rubber grommet (customer supplied) to protect the wires.5.Feed the power wires through the wire access hole in the mounting surface and through the mounting gasket and strobe light base.6.Align the mounting holes in the strobe base, gasket, and mounting surface. Secure the base to the mounting surface with the three mounting screws provided.7.Inside the base, tie a knot in the power wires 3 inches from the end to act as a strain relief. Connect the power wires to the strobe power supply assembly (see “Wiring Instructions”next page). Replace the strobe power supply assembly into the base being careful not to pinch any of the wires.8.Replace the dome gasket on the power supply assembly and secure the optic dome to the base by aligning the tabs on the dome with the pockets in the strobe base. Press firmly on the top of the optic dome so the tabs snap into the pockets.WIRING INSTRUCTIONS:NOTE: DC voltage models are polarity sensitive. If the positive and negative wires are reversed the unit will not function. A 2 amp fuse (customer supplied) must beinstalled in the RED (+) wire within 2 wire feet of the power source.1. Connect RED wire on beacon to positive (+) DC voltage .2. A customer supplied single pole single throw (SPST) switch may be used to control the ON-OFF function of the beacon.3. Connect BLACK wire on the beacon to negative (-) ground.WARNING: All customer supplied wires, that connect to the positive terminal of the battery, must be sized to supply at least 125% of the maximum operating current, and fused at the battery to carry that load.Trouble Shooting:WARNING! The strobe light is a high voltage device .DO NOT TOUCH the strobe lamp assembly or the strobe power supply assembly while the unit is in operation!WAIT 10 MINUTES after turning power off before starting work or troubleshooting.Light does not work after initial installation:。


Technical Information TI 036D/24/aeElectromagnetic Flow Monitor magphantFlow monitoring in 1” to 80” pipes with conductive liquidsNothing beats know-howMonitoring and measurement•Flow monitoring with selectable limit values (dry-contact relay output)•Flow velocity measurement via 4 to 20 mAlinear current outputUniversal application•One compact flow monitor for all applications•Installation in 1” pipes up to 80”Simple operation•Selectable limit value via rotary switch •Local potentiometer setting of full-scale value•Full-scale and limit values can be set up before installationSafe operation•Reliable monitoring (4 mA) even with empty pipe•Electromagnetic Compatibility (EMC)checked according to IEC •Self-testing electronics•Galvanically isolated outputsAdvantages•No moving parts •Simple to install •No maintenance•Rugged, long-life design•Smallest flow monitor on the marketMagphant Measuring System Areas of applicationThe Magphant flow monitor providesnecessary flow rate information to adviseprocess operators on the status of plantoperation. The electromagnetic measur-ing principle determines the flow velocityof the conductive liquid at the tip of thesensor. Moving above or below a presetswitchpoint (limit value) is indicated by arelay contact.A 4 to 20 mA signal proportional to theflow is also available for monitoring theflowrate. The Magphant is ideal forprocess protection and monitoring.Areas of application:Applications:Process plants- Dry run protection for pumps- Flow monitoring- On/off switching according to flowrate- Control of cooling systems for pumps,turbines, compressors, heatexchangersChemical industry- Flow monitoring- Monitoring pump functionEnergy production- Monitoring coolant to bearings forturbines and generators in powerplants- Cooling circuits for transformers Water treatment- Status indication of valves in waterdistribution systems- Blockage indicaton in pipes Beverage industry- Filtration control- Monitoring cleaning proceduresDairy industry- Cooling systems in refrigeration plants Metal production and processing- Detecting breakdown of coolingsystems for bearings andtransmissionsFarming and horticulture- Control and monitoring of irrigationsystems2Functions Design Measuring principleIn accordance with Faraday’s law ofelectromagnetic induction, a voltage (Ue)is induced in a conductor that is movedthrough a magnetic field. In the electro-magnetic principle of measurement theflowing and electrically conductive fluidMicroprocessor-controlled electronics,utilizing patented “Integrated AutozeroCircuit” guarantees a stable zero-pointand converts the voltage into an analog4 to 20 mA scaled output signal.3Mounting InstructionsOrientation in the pipingFor best results, the Magphant should be mounted in vertical piping. A minimum of 5 to 10 straight pipe diameters before and after the sensor should be main-tained to ensure an even flow over the electrodes.Should horizontal piping be used, the sensor should be mounted to the side or downwards (45° below horizontal) to ensure the electrodes are always immersed in flowing fluid.4Plastic pipe version, 1/2” to 12”The plastic insert fitting for either PVC or Polypropylene pipe comes in onestandard size, but is USER modified for overall length and insertion depth before installation.NOTE: The Magphant for steel piping cannot be used in plastic pipe. The insertion length is different and will not measure properly.The Magphant can be installed in existing T -fittings (or user-supplied T -fittings) where other styles of insertion type instruments are being used.Operational safetyComprehensive self-monitoring of the measuring system assures high safety.Any error messages that do occur (process errors, instrument systemerrors) are immediately signalled via the current and relay outputs.The Magphant measuring system fulfills all general requirements for electromag-netic compatibility (EMC) according to CE (EN 50081-1-2 and EN 50082-1-2).Protection type NEMA 4X is standard.pipe version, 1”Steel The sensor is mounted using the weld stub supplied. For a 1” pipe, the weld stub has a pre-cut radius to match the pipe outer diameter. Opening size in the pipe for the sensor tip is 0.91” (23 mm).Steel pipe version, 1-1/2” and l a r g e rFor 1-1/2” piping and larger, the weld stub has a graduated scale marked for proper insertion according to pipe diameter. The opening in the pipe to insert the weld stub is 1.18” (30 mm).Ensure the weld stub is perpendicular to the axis of the piping before welding.NOTE: Do not weld the stub with the sensor installed.Specify carbon steel or stainless steel stub depending on your process piping.Electrical Connection Warning!Do not install, wire or dismantle theinstrument when the power supply isswitched on.Take a test drive: Free simulation software which fully simulates the operation of theMagphant is available from Endress+Hauser on diskette, or can be down loaded fromthe Endress+Hauser web site at .5Dimensions6Technical Data Power Supply20 to 30 VDC (24 VDC nominal)Power Consumption< 2.5 WOutputs Current: 4 to 20 mA, active. The measuringsystem can monitor flow in both directions, i.e.bidirectional. The current output is alwayspositive. The relay responds in both flowdirections.Relay output: SPDT dry change-over contact,60 VAC / 0.4 A; 75 VDC / 0.5 AAmbient T emperature-4° to +140°F (-20° to +60°C)Process Temperature-4° to +250°F (-20° to +120°C), with weld stubof 316L SS and SS clamp ring.-4° to +212°F (-20° to +100°C), with weld stubof A570 carbon steel, SS clamp ring andNBR gasketPressure Steel version, 230 psig at 77°F (16 bar at 25°C)Steel version, 145 psig at 250°F (10 barat 120°C)PVC version, 145 psig at 77°F (10 bar at 25°C)PVC version, 14 psig at 140°F (1 bar at 60°C)PP version, 145 psig at 68°F (10 bar at 20°C)PP version, 29 psig at 176°F (2 bar at 80°C)Full-scale Value 1.32 to 23.1 ft/s (0.4 to 7 m/s) invinitely variableMinimum Mesaurable Flow Output cuts off at 0.165 ft/s and resumes againupon exceeding 0.33 ft/s (50% hysteresis)Accuracy± 2% of rate at measuring electrode with localcalibration at flow velocities > 1.32 ft/s (0.4 m/s)Reproducibility± 2% of rateConductivity³ 20 m S/cmInterference Immunity According to CE EN 50081-1-2 andEN 50082-1-2 when properly groundedProtection T ype NEMA 4X with 1/2” NPT conduit fittingsMaterials Sensor tip: PVDF, Viton O-ring.Electrodes: 316L SS.Probe: 316L SS with 316Ti SSclamp ring for 316L SS weld stub, or316L SS with 316Ti SS clamp ring and NBR(Acrylonitril-Butadiene-Copolymer) gasketfor A570 weld stub and plastic pipe version.Housing: Aluminum, epoxy powder coated.Weld stub: 316L SS or A570 carbon steel.Plastic pipe: PVC insert fitting for PVC pipe orPolypropylene insert fitting for PP pipe with316L SS insert adapter.Approvals FM approved, non-incendive for Class I,Division 2, Groups A-D.CSA approved, Class I, Division 2, Groups A-D.7Ordering Information1A1A221234593C94495A9NOTE:TI 036D/24/ae/03.98。

DataOrdering dataProduct typedescriptionSRB301ST-24V-(V.2)Article number(order number)103006151EAN (EuropeanArticle Number)4030661521589eCl@ss number,Version 9.027-37-18-19CertificationsCertificates TÜVcULusCCCEAC TILVAGeneral dataProduct name SRB301ST SRB301ST-24V-(V.2)1 Signalling output3 safety contacts, STOP 0Fit for signal evaluation of outputs of safety magneticswitchesSuitable for signal processing of outputs connected topotentials (AOPDs), e.g. safety light grids/curtainsSuitable for signal processing of potential-free outputs,e.g. emergency stop command devices, position switchesand solenoid interlocksStandards IEC 61508IEC/EN 60204-1 ISO 13849-1 EN 60947-5-1 EN 81-20/-50Climatic stress EN 60068-2-78Enclosure material Glass-fibre reinforced thermoplastic, ventilated Material of thecontacts, electricalAgSn0. self-cleaning, positive driveGross weight250 gGeneral data - FeaturesStop-Category0Electronic Fuse YesWire breakagedetectionYesShort-circuitrecognitionYesRemovable Terminals YesStart input YesFeedback circuit YesAutomatic resetfunctionYesReset edge detection YesEarth connectiondetectionYesIntegral SystemDiagnostics, statusYesNumber of auxiliarycontacts1Number of LEDs5Number of openers2Number of safetycontacts3Safety appraisalStandards EN 60947-5-1 IEC 61508Safety appraisal - Relay outputsPerformance Level,Stop 0eCategory, Stop 04Diagnostic Coverage(DC) Level, Stop 0≥ 99 %PFH-Value Stop 0 2.00 x 10⁻⁸ /hSafety Integrity Level(SIL), Stop 03Mechanical dataMounting Snaps onto standard DIN rail to EN 60715 Mechanical life,minimum10,000,000 OperationsMechanical data - Connection techniqueTerminal Connector Screw connection, plug-in rigid or flexibleTerminaldesignationsIEC/EN 60947-1 Cable section,minimum0.25 mm²Cable section,maximum2.5 mm²Tightening torque ofClips0.6 Nm Mechanical data - Dimensions Width22.5 mm Height120 mmDepth121 mm Ambient conditionsProtection class ofthe enclosureIP40 Protection class ofthe ClearanceIP54 Protection class ofClips or TerminalsIP20Ambienttemperature,minimum-25 °CAmbienttemperature,maximum+60 °CStorage andtransporttemperature,minimum-40 °CStorage andtransporttemperature,maximum+85 °CResistance tovibrations to EN60068-2-610 ... 55 Hz, Amplitude 0.35 mm Restistance to shock30 g / 11 msAmbient conditions - Insulation valueRated impulsewithstand voltage4 kVIIIDegree of pollutionto IEC/EN 60664-12Electrical dataFrequency range 50 Hz 60 HzRated operating voltage 24 VAC -15% / +10%24 VDC -15%/+20%, residual ripple max. 10%Rated AC voltage forcontrols, 50 Hz,minimum20.4 VACRated controlvoltage at AC 50 Hz,maximum26.4 VACRated AC voltage forcontrols, 60 Hz,minimum20.4 VACRated controlvoltage at AC 60 Hz,maximum26.4 VACRated AC voltage forcontrols at DCminimum20.4 VDCRated controlvoltage at DC,maximum28.8 VDCElectrical powerconsumption2 W Electrical powerconsumption4.9 VA Contact resistance,maximum0.1 ΩNote (Contactresistance)in new stateDrop-out delay incase of powerfailure, typically80 msDrop-out delay incase of emergency,typically20 msPull-in delay atautomatic start,maximum, typically100 msPull-in delay atRESET, typically20 msElectrical data - Safe relay outputsSwitching capacity,minimum10 VDCSwitching capacity,minimum10 mASwitching capacity,maximum250 VACSwitching capacity,maximum8 AElectrical data - Digital inputsConductionresistance, maximum40 ΩElectrical data - Relay outputs (auxiliary contacts)Switching capacity,maximum24 VDCSwitching capacity,maximum2 AElectrical data - Electromagnetic compatibility (EMC)EMC-DirectiveStatus indicationNote (LED switchingconditions display)QS: cross-wire short detection status (LED on when cross-wire short detection active).Indicated operating states Position relay K2Position relay K1Internal operating voltage U<sub>i</sub>Other dataNote (applications)Safety sensorGuard systemEmergency-Stop buttonPull-wire emergency stop switches Safety light barriersNotesNote (General)Inductive loads (e.g. contactors, relays, etc.) are to be suppressed by means of a suitable circuit.Circuit exampleNote (Wiringdiagram)The wiring diagram is shown with guard doors closed and in de-energised condition.Input level: The example shows a 2-channel control of a guard door monitoring with twoposition switches, whereof one with positive break, external reset button (R) andfeedback circuit (H2).Relay outputs: Suitable for 2 channel control, for increase in capacity or number ofcontacts by means of contactors or relays with positive-guided contacts.The control recognises cross-short, cable break and earth leakages in the monitoringcircuit.Switch setting: The cross-wire short detection function (factory default) is programmedby means of the switch located underneath the front cover of the module: Pposition nQS (top): no cross-wire short protection, suitable for 1-channel applications andapplications with outputs with potential in the control circuits. Position QS (bottom):cross-wire short protection, suitable for 2-channel applications without outputs withpotential in the control circuits.For 1-channel control, connect NC contact to S11/S12 and bridge S12/S22 (QS-switch =nQS)Connect potential p-type outputs of safety light grids/curtains to S12/S22. The devicesmust have the same reference potential. QS-switch = nQSAutomatic start: The automatic start is programmed by connecting the feedback circuitto the terminals S12/X3. If the feedback circuit is not required, establish a bridge.F1 = Hybrid fuse PicturesProduct picture (catalogue individual photo)ID: ksrb3f04| 808,3 kB | .jpg | 265.994 x 625.122 mm - 754 x 1772Pixel - 72 dpi| 169,9 kB | .jpg | 27.093 x 63.669 mm - 320 x 752Pixel - 300 dpi| 101,1 kB | .png | 74.083 x 173.919 mm - 210 x 493Pixel - 72 dpiWiring exampleID: 1srb3l05| 96,2 kB | .jpg | 352.778 x 248.003 mm - 1000 x 703Pixel - 72 dpi| 69,6 kB | .cdr |Wiring exampleID: ksrb3l05| 44,5 kB | .cdr || 161,4 kB | .jpg | 352.778 x 360.892 mm - 1000 x1023 Pixel - 72 dpiWiring exampleID: ksrb3l26| 125,5 kB | .jpg | 352.778 x 241.3 mm - 1000 x 684Pixel - 72 dpi| 36,4 kB | .cdr |Symbol (technical standard)ID: kformm02| 191,1 kB | .jpg | 352.778 x 246.592 mm - 1000 x 699Pixel - 72 dpiK.A. Schmersal GmbH & Co. KG, Möddinghofe 3, D-42279 WuppertalThe details and data referred to have been carefully checked. Images may diverge from original. Further technical data can be found in the manual. Technical amendments and errors possible.Generated on 08.07.2020 17:17:36。
Code :
供应商:Spec :
送样时间:序号
大类项目检查内容检查方法合格标准检查结果判定检查人时间说明1
供应商LOGO 是否有供应商LOGO 目视检查2
型号标记是否有型号标记目视检查3
输入电压范围标记是否有输入电压范围标记并符合规范书目视检查4
输入频率标记是否有输入频率标记并符合规范书目视检查5
输入最大电流标记是否有输入最大电流并符合规范书目视检查6
输出电压范围标记是否有输出电压范围标记并符合规范书目视检查7
输出电流范围标记是否有输出电流范围标记并符合规范书目视检查8
空载输出电压标记是否有空载输出电压标记并符合规范书目视检查9
功率因数标记是否有功率因数标记并符合规范书目视检查10
Ta标记是否有Ta标记并符合规范书目视检查11
Tc标记是否有Tc标记并符合规范书目视检查12
输出短路安全隔离电压器标记是否有输出短路安全隔离电压器标记目视检查13
电气类别标记是否有电气类别标记目视检查14
IP等级标记是否有IP等级标记目视检查15
SELV标记是否有SELV标记目视检查16
输入接线标记是否有输入接线标记目视检查17
输出接线标记是否有输出接线标记目视检查18
认证标记是否有认证标记目视检查19独立式标记是否有独立式标记
目视检查LED Driver Check List
驱动器点检表
标记检查File No : LSI-XX-XX Version: V0.0 Review date: 2017.6.15 1/3
3/3。
Customizable Non Fail-Safe multifunctiontechnology actuator for controlling dampers in typical commercial HVAC applications.• Actuating force motor 150 N [35 lbf]• Nominal voltage AC/DC 24 V • Control MFT/programmable • Position feedback 2...10 VTechnical dataElectrical dataNominal voltageAC/DC 24 V Nominal voltage frequency 50/60 HzNominal voltage rangeAC 19.2...28.8 V / DC 19.2...28.8 V Power consumption in operation 2.5 W Power consumption in rest position 1.2 W Transformer sizing 5 VAElectrical Connection18 GA plenum cable with 1/2" conduitconnector, degree of protection NEMA 2 / IP54, 1 m 3 m and 5 mOverload Protectionelectronic throughout full stroke Functional dataActuating force motor 150 N [35 lbf]Operating range Y 2...10 VOperating range Y note 4...20 mA w/ ZG-R01 (500 Ω, 1/4 W resistor)Input impedance100 kΩ for 2...10 V (0.1 mA), 500 Ω for 4...20 mA, 1500 Ω for PWM, On/Off and Floating point Operating range Y variable Start point 0.5...30 V End point 2.5...32 VOperating modes optional variable (VDC, on/off, floating point)Position feedback U 2...10 V Position feedback U note Max. 0.5 mA Position feedback U variable VDC variable Direction of motion motor reversible with switch Manual override external push button Stroke12" [300 mm]Running Time (Motor)150 s / 100 mm Running time motor variable 70...270 s / 100 mm Noise level, motor35 dB(A)Safety dataPower source ULClass 2 Supply Degree of protection IEC/EN IP54Degree of protection NEMA/UL NEMA 2Enclosure UL Enclosure Type 2Agency ListingcULus acc. to UL60730-1A/-2-14, CAN/CSA E60730-1:02CE acc. to 2014/30/EU and 2014/35/EU Quality Standard ISO 9001UL 2043 CompliantSuitable for use in air plenums per Section 300.22(C) of the NEC and Section 602 of the IMCAmbient humidity Max. 95% RH, non-condensing Ambient temperature-22...122°F [-30...50°C]FootnotesApplicationOperationTypical specificationSafety dataStorage temperature -40...176°F [-40...80°C]Servicingmaintenance-free Weight Weight1.4 lb [0.63 kg]MaterialsHousing material UL94-5VA†Rated Impulse Voltage 800V, Type of Action 1, Control Pollution Degree 2.Product featuresFor proportional modulation of dampers in HVAC systems. Actuator sizing should be done in accordance with the damper manufacturer’s specifications.The default parameters for 2 to 10 VDC applications of the …MFT actuator are assigned during manufacturing. If necessary, custom versions of the actuators can be ordered. The parameters can be changed by two means: pre-set and custom configurations from Belimo or on-site configurations using the Belimo PC-Tool software.The actuator is not provided with and does not require and limit switches, but is electronically protected against overload. The anti-rotation strap supplied with the actuator will prevent lateral movement.The LHX series provides 4, 8, or 12 in of linear force. The stroke of the gear rack can be adjusted on both sides in increments of 0.8 in [20 mm] by means of the mechanical end stops.When reaching the damper or actuator end position, the actuator automatically stops.The gears can be manually disengaged with a button on the actuator cover.The LHX24-MFT… actuators use a sensorless brushless DC motor, which is controlled by an Application Specific Integrated Circuit (ASIC). The ASIC monitors and controls the actuator’s rotation and provides a digital rotation sensing (DRS) function to prevent damage to the actuator in a stall condition. Power consumption is reduced in holding mode.Proportional control damper actuators shall be electronic type, which require no crank arm and linkage. Actuators must provide proportional damper control in response to a 2 to 10 VDC or, with the addition of a 500 Ω resistor, a 4 to 20 mA control input from an electronic controller or positioner. Actuators shall have brushless DC motor technology and be protected from overload at all angles of rotation. Actuators shall have reversing switch and manual override on the cover. Run time shall be constant and independent of torque. A 2 to 10 VDC feedback signal shall be provided for position indication. Actuators shall be cUL Approved, have a 5-year warranty, and be manufactured under ISO 9001 International Quality Control Standards. Actuators shall be as manufactured by Belimo.AccessoriesElectrical accessoriesDescriptionType DC Voltage Input Rescaling ModuleIRM-100Convert Pulse Width Modulated Signal to a 2...10 V Signal for Belimo Proportional ActuatorsPTA-250Positioner for wall mountingSGA24Positioner for front-panel mounting SGF24Cable conduit connector 1/2"TF-CC US Gateway MP to BACnet MS/TP UK24BAC Gateway MP to LonWorks UK24LON Gateway MP to Modbus RTUUK24MOD Resistor, 500 Ω, 1/4" wire resistor with 6" pigtail wires ZG-R01Resistor kit, 50% voltage dividerZG-R02Transformer, AC 120 V to AC 24 V, 40 VAZG-X40Battery backup system, for non-spring return models NSV24 US Battery, 12 V, 1.2 Ah (two required)NSV-BATMechanical accessoriesDescriptionType Ball joint suitable for damper crank arm KH8 / KH10, Multipack 10 pcs.KG10A Ball joint suitable for damper crank arm KH8, Multipack 10 pcs.KG6Ball joint suitable for damper crank arm KH8, Multipack 10 pcs.KG8Push rod for KG6 & KG8 ball joints (36” L, 5/16” diameter).SH8Rotary support, for linear actuator, for compensation of transverse forces Z-DS13/8”-16 shaft clevis for AHK/AH.Z-KSC Bracket for AHK/AH/LH linear actuators.ZG-119ToolsDescriptionType Belimo PC-Tool, Software for adjustments and diagnostics MFT-P Signal simulator, Power supply AC 120 VPS-100Connecting cable 16 ft [5 m], A: RJ11 6/4 ZTH EU, B: 6-pin for connection to service socketZK1-GEN Connecting cable 16 ft [5 m], A: RJ11 6/4 ZTH EU, B: free wire end for connection to MP/PP terminalZK2-GEN Connecting cable 10 ft [3 m], A: RJ11 6/4 ZTH EU, B: 3-pin Weidmüller and supply connectionZK4-GEN Service Tool, with ZIP-USB function, for programmable andcommunicative Belimo actuators, VAV controller and HVAC performance devicesZTH USElectrical installationActuators with appliance cables are numbered.Provide overload protection and disconnect as required.Actuators may also be powered by DC 24 V.Only connect common to negative (-) leg of control circuits.A 500 Ω resistor (ZG-R01) converts the 4...20 mA control signal to 2...10 V.Control signal may be pulsed from either the Hot (Source) or Common (Sink) 24 V line.For triac sink the Common connection from the actuator must be connected to the Hotconnection of the controller. Position feedback cannot be used with a triac sink controller; theactuator internal common reference is not compatible.Actuators may be connected in parallel if not mechanically linked. Power consumption andinput impedance must be observed.IN4004 or IN4007 diode. (IN4007 supplied, Belimo part number 40155).VDC/mA ControlWiring diagramsOn/OffFloating Point VDC/mA ControlPWM Control Override ControlDimensions。
电子设计自动化(EDA)—数字时钟LED数码管显示二、实验内容和实验目的1. 6个数码管动态扫描显示驱动2. 按键模式选择(时\分\秒)与闹钟(时\分)调整控制,3. 用硬件描述语言(或混合原理图)设计时、分、秒计数器模块、闹钟模块、按键控制状态机模块、动态扫描显示驱动模块、顶层模块。
要求使用实验箱左下角的6个动态数码管(DS6 A~DS1A)显示时、分、秒;要求模式按键和调整按键信号都取自经过防抖处理后的按键跳线插孔。
实验目的: 1)学会看硬件原理图, 2)掌握FPGA硬件开发的基本技能3)培养EDA综合分析、综合设计的能力三、实验步骤、实现方法(或设计思想)及实验结果主要设备: 1)PC机, 2)硬件实验箱, 3)Quartus II软件开发平台。
1.打开Quartus II , 连接实验箱上的相关硬件资源, 如下图1所示。
2.建立新文件, 选择文本类型或原理图类型。
3. 编写程序。
4.编译5. 仿真, 加载程序到芯片, 观察硬件输出结果(数码管显示)6.结果正确则完成。
若结果不正确, 则修改程序, 再编译, 直到正确。
模24计数器模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;USE IEEE.STD_LOGIC_UNSIGNED.ALL;USE IEEE.STD_LOGIC_ARITH.ALL;ENTITY count24 ISPORT(clk,en:IN STD_LOGIC;cout:OUT STD_LOGIC;hh,hl:OUT STD_LOGIC_VECTOR(3 DOWNTO 0));END count24;ARCHITECTURE arc OF count24 ISSIGNAL a,b:STD_LOGIC_VECTOR(3 DOWNTO 0);BEGINPROCESS(clk,en)BEGINhh<=a;hl<=b;IF(clk'EVENT AND clk='1') THENIF(en='1') THENIF(a="0010" AND b="0011") THENa<="0000";b<="0000";ELSE IF(b="1001") THENa<=a+'1';b<="0000";ELSE b<=b+'1';END IF;END IF;IF(a="0010" AND b="0010") THENcout<='1';ELSE cout<='0';END IF;END IF;END IF;END PROCESS;END arc;模60计数器模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;USE IEEE.STD_LOGIC_UNSIGNED.ALL;USE IEEE.STD_LOGIC_ARITH.ALL;ENTITY count60 ISPORT(clk,en:IN STD_LOGIC;cout:OUT STD_LOGIC;hh,hl:OUT STD_LOGIC_VECTOR(3 DOWNTO 0));END count60;ARCHITECTURE arc OF count60 ISSIGNAL a,b:STD_LOGIC_VECTOR(3 DOWNTO 0);SIGNAL sout:STD_LOGIC;BEGINPROCESS(clk)BEGINhh<=a; hl<=b;IF(clk'EVENT AND clk='1') THENIF(en='1') THENIF(a="0101" AND b="1001") THENa<="0000";b<="0000";ELSE IF(b="1001") THENa<=a+'1';b<="0000";ELSE b<=b+'1';END IF;END IF;END IF;END IF;END PROCESS;sout<='1' WHEN a="0101" AND b="1001" ELSE '0';cout<=sout AND en;END arc;4-7显示译码模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;ENTITY segment4to7 ISPORT(s:IN STD_LOGIC_VECTOR(3 DOWNTO 0);a,b,c,d,e,f,g:OUT STD_LOGIC);END segment4to7;ARCHITECTURE arc OF segment4to7 IS SIGNAL y:STD_LOGIC_VECTOR(6 DOWNTO 0); BEGINa<= y(6);b<= y(5);c<= y(4);d<= y(3);e<= y(2); f<= y(1);g<= y(0);PROCESS(s)BEGINCASE s ISWHEN "0000"=>y<="1111110"; WHEN "0001"=>y<="0110000"; WHEN "0010"=>y<="1101101"; WHEN "0011"=>y<="1111001"; WHEN "0100"=>y<="0110011"; WHEN "0101"=>y<="1011011"; WHEN "0110"=>y<="1011111"; WHEN "0111"=>y<="1110000"; WHEN "1000"=>y<="1111111"; WHEN "1001"=>y<="1111011"; WHEN OTHERS=>y<="0000000"; END CASE;END PROCESS;END arc;带闹钟控制模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;ENTITY mode_adjust_with_alarm ISPORT (adjust,mode,clk1hz: IN STD_LOGIC;clkh,enh,clkm,enm,clks,enha: OUT STD_LOGIC;clkh_a,clkm_a:OUT STD_LOGIC;mode_ss: OUT STD_LOGIC_VECTOR(2 DOWNTO 0));END mode_adjust_with_alarm;ARCHITECTURE arc OF mode_adjust_with_alarm ISTYPE mystate IS (s0,s1,s2,s3,s4,s5);SIGNAL c_state,next_state: mystate;BEGINPROCESS (c_state)BEGINCASE c_state ISWHEN s0=> next_state <= s1; clkh<=clk1hz; clkm<=clk1hz; clks<=clk1hz;enh<='0'; enm<='0'; enha<='0'; clkh_a<= '0'; clkm_a<= '0'; mode_ss <="000";WHEN s1=> next_state <= s2; clkh<=adjust; clkm<= '0'; clks<='0';enh<='1'; enm<='0';enha<='0'; clkh_a<= '0';clkm_a<= '0'; mode_ss <="001";WHEN s2=> next_state <= s3; clkh<= '0'; clkm<=adjust; clks <= '0';enh<='0';enm<='1';enha<='0'; clkh_a<= '0'; clkm_a<= '0'; mode_ss <="010";WHEN s3=> next_state <= s4; clkh<= '0'; clkm<= '0'; clks<=adjust;enh<='0'; enm<='0';enha<='0'; clkh_a<= '0'; clkm_a<= '0'; mode_ss <="011";WHEN s4=> next_state <= s5; clkh<= clk1hz; clkm<= clk1hz; clks<=clk1hz;enh<='0';enm<='0';enha<='1'; clkh_a<=adjust; clkm_a<= '0'; mode_ss <="100";WHEN s5=> next_state <= s0; clkh<= clk1hz; clkm<= clk1hz; clks<=clk1hz;enh<='0'; enm<='0'; enha<='0'; clkh_a<= '0'; clkm_a<=adjust; mode_ss <="101";END CASE;END PROCESS;PROCESS (mode)BEGINIF (mode'EVENT AND mode='1') THENc_state<=next_state ;END IF;END PROCESS;END arc;扫描模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;USE IEEE.STD_LOGIC_UNSIGNED.ALL;ENTITY scan ISPORT(clk256hz:IN STD_LOGIC;ss:OUT STD_LOGIC_VECTOR(2 DOWNTO 0));END scan;ARCHITECTURE arc OF scan ISTYPE mystate IS (s0, s1,s2,s3,s4,s5);SIGNAL c_state,next_state: mystate;BEGINPROCESS ( c_state )BEGINCASE c_state ISWHEN s0=> next_state <=s1; ss<="010";WHEN s1=> next_state <=s2; ss<="011";WHEN s2=> next_state <=s3; ss<="100";WHEN s3=> next_state <=s4; ss<="101";WHEN s4=> next_state <=s5; ss<="110";WHEN s5=> next_state <=s0; ss<="111";END CASE;END PROCESS;PROCESS (clk256hz)BEGINIF (clk256hz'EVENT AND clk256hz='1') THENc_state<=next_state ;END IF;END PROCESS;END arc;复用模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;ENTITY mux ISPORT(hh,hl,mh,ml,sh,sl,hha,hla,mha,mla:IN STD_LOGIC_VECTOR(3 DOWNTO 0);ss,mode_ss:IN STD_LOGIC_VECTOR(2 DOWNTO 0);y:OUT STD_LOGIC_VECTOR(3 DOWNTO 0);alarm:OUT STD_LOGIC);END mux;ARCHITECTURE arc OF mux ISSIGNAL a,hhtmp,hltmp,mhtmp,mltmp,shtmp,sltmp:STD_LOGIC_VECTOR(3 DOWNTO 0);BEGINPROCESS(mode_ss)BEGINCASE mode_ss ISWHEN "000"=>hhtmp<=hh; hltmp<=hl; mhtmp<=mh; mltmp<=ml; shtmp<=sh; sltmp<=sl;WHEN "001"=>hhtmp<=hh; hltmp<=hl; mhtmp<=mh; mltmp<=ml; shtmp<=sh; sltmp<=sl;WHEN "010"=>hhtmp<=hh; hltmp<=hl; mhtmp<=mh; mltmp<=ml; shtmp<=sh; sltmp<=sl;WHEN "011"=>hhtmp<=hh; hltmp<=hl; mhtmp<=mh; mltmp<=ml; shtmp<=sh; sltmp<=sl;WHEN "100"=> hhtmp<=hha; hltmp<=hla; mhtmp<=mha; mltmp<=mla; shtmp<=sh; sltmp<=sl;WHEN "101"=> hhtmp<=hha; hltmp<=hla; mhtmp<=mha; mltmp<=mla; shtmp<=sh; sltmp<=sl;WHEN OTHERS=>hhtmp<="0000";hltmp<="0000";mhtmp<="0000";mltmp<="0000";shtmp<="0000";sltmp<="0000"; END CASE;END PROCESS;PROCESS(ss)BEGINCASE ss ISWHEN "010"=> a <=hhtmp;WHEN "011"=> a <=hltmp;WHEN "100"=> a <=mhtmp;WHEN "101"=> a <=mltmp;WHEN "110"=> a <=shtmp;WHEN "111"=> a <=sltmp;WHEN OTHERS => a <="0000";END CASE;y<=a;END PROCESS;alarm<='1' WHEN ((hh=hha)AND(hl=hla)AND(mh=mha)AND(ml=mla)) ELSE '0';END arc;闪烁模块LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;USE IEEE.STD_LOGIC_UNSIGNED.ALL;ENTITY blink_control ISPORT(ss,mode_ss:IN STD_LOGIC_VECTOR(2 DOWNTO 0);blink_en:OUT STD_LOGIC);END blink_control;ARCHITECTURE arc OF blink_control ISBEGINPROCESS (ss,mode_ss)BEGINIF(ss="010" AND mode_ss="001") THEN blink_en<='1';ELSIF(ss="011" AND mode_ss="001") THEN blink_en<='1';ELSIF(ss="100" AND mode_ss="010") THEN blink_en<='1';ELSIF(ss="101" AND mode_ss="010") THEN blink_en<='1';ELSIF(ss="110" AND mode_ss="011") THEN blink_en<='1';ELSIF(ss="111" AND mode_ss="011") THEN blink_en<='1';ELSIF(ss="010" AND mode_ss="100") THEN blink_en<='1';ELSIF(ss="011" AND mode_ss="100") THEN blink_en<='1';ELSIF(ss="100" AND mode_ss="101") THEN blink_en<='1';ELSIF(ss="101" AND mode_ss="101") THEN blink_en<='1';ELSE blink_en<='0';END IF;END PROCESS;END arc;Top文件LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;USE IEEE.STD_LOGIC_UNSIGNED.ALL;ENTITY design3 ISPORT (mode,adjust,clk1hz,clk2hz,clk256hz,clk1khz:IN STD_LOGIC;alarm,a,b,c,d,e,f,g:OUT STD_LOGIC;ss:OUT STD_LOGIC_VECTOR(2 DOWNTO 0));END design3;ARCHITECTURE arc OF design3 ISCOMPONENT mode_adjust_with_alarm PORT (adjust,mode,clk1hz: IN STD_LOGIC;clkh,enh,clkm,enm,clks,enha: OUT STD_LOGIC;clkh_a,clkm_a:OUT STD_LOGIC;mode_ss: OUT STD_LOGIC_VECTOR(2 DOWNTO 0));END COMPONENT;COMPONENT scan PORT (clk256hz:IN STD_LOGIC;ss:OUT STD_LOGIC_VECTOR(2 DOWNTO 0));END COMPONENT;COMPONENT segment4to7 PORT (s: IN STD_LOGIC_VECTOR(3 DOWNTO 0);a,b,c,d,e,f,g: OUT STD_LOGIC);END COMPONENT;COMPONENT mux PORT(hh,hl,mh,ml,sh,sl,hha,hla,mha,mla:IN STD_LOGIC_VECTOR(3 DOWNTO 0);ss,mode_ss:IN STD_LOGIC_VECTOR(2 DOWNTO 0);y:OUT STD_LOGIC_VECTOR(3 DOWNTO 0);alarm:OUT STD_LOGIC);END COMPONENT;COMPONENT blink_control PORT(ss,mode_ss:IN STD_LOGIC_VECTOR(2 DOWNTO 0);blink_en:OUT STD_LOGIC);END COMPONENT;COMPONENT count24 PORT (clk,en:IN STD_LOGIC;cout:OUT STD_LOGIC;hh,hl:OUT STD_LOGIC_VECTOR(3 DOWNTO 0));END COMPONENT;COMPONENT count60 PORT (clk ,en:IN STD_LOGIC;cout:OUT STD_LOGIC;hh,hl:OUT STD_LOGIC_VECTOR(3 DOWNTO 0));END COMPONENT;SIGNALclkh,enh,clkm,enm,clks,clkh_a,clkm_a,coutm,couts,coutm_en,couts_en,cout,vcc,coutma_en,coutma,alarm1,bli nk_en,blink_tmp,enha: STD_LOGIC;SIGNAL mode_ss,ss1:STD_LOGIC_VECTOR(2 DOWNTO 0);SIGNAL hh,hl,mh,ml,sh,sl,hha,hla,mha,mla,y,i:STD_LOGIC_VECTOR(3 DOWNTO 0);BEGINvcc<='1';coutm_en <= enh OR coutm;couts_en <= enm OR couts;coutma_en<= enha OR coutma;blink_tmp<=blink_en and clk2hz;i(3)<=y(3) OR blink_tmp;i(2)<=y(2) OR blink_tmp;i(1)<=y(1) OR blink_tmp;i(0)<=y(0) OR blink_tmp;ss<=ss1;alarm<=alarm1 AND clk1khz;u1:mode_adjust_with_alarmPORT MAP( adjust,mode,clk1hz,clkh,enh,clkm,enm,clks,enha,clkh_a,clkm_a,mode_ss);u2:count24 PORT MAP(clkh,coutm_en,cout,hh,hl);u3:count60 PORT MAP(clkm,couts_en,coutm,mh,ml);u4:count60 PORT MAP(clks,vcc,couts,sh,sl);u5:count24 PORT MAP(clkh_a,coutma_en,cout,hha,hla);u6:count60 PORT MAP(clkm_a,vcc,coutma,mha,mla);u7:mux PORT MAP(hh,hl,mh,ml,sh,sl,hha,hla,mha,mla,ss1,mode_ss,y,alarm1);u8:scan PORT MAP(clk256hz,ss1);u9:blink_control PORT MAP(ss1,mode_ss,blink_en);u10:segment4to7 PORT MAP(i,a,b,c,d,e,f,g);END arc;实验结果:数字钟包括正常的时分秒计时, 实验箱左下角的6个动态数码管(DS6 A~DS1A)显示时、分、秒。
Led显示屏测试报告LED显示屏测试报告1.屏显示的数据测试内容:测试屏幕显示数据的效果。
测试环境:LED显示屏、计算机、USB转232线、显示屏数据线。
测试方法:添加5屏,分别采用不同的进入方式,速度,停留时间和退出方式,测试字体大小为16X16点阵和32X32点阵的情况,发送数据并检查显示结果。
详细说明:添加5屏,进入方式分别为:直接进入、向上移入、向下移入、向左移入、向右移入,进入速度为8,停留时间为30,退出方式为直接消失,退出速度为8,字体大小为16X16点阵。
添加5屏,进入方式为直接进入,进入速度为8,停留时间为30,退出方式为直接消失、向上移出、向下移出、向左移出、向右移出,退出速度为8,字体大小为32X32点阵。
发送数据并检查显示结果。
测试结果:在字体大小为16X16点阵的情况下,测试结果正常。
而在字体大小为32X32点阵的情况下,部分汉字无法正常显示,主要原因是字库芯片的存储空间有限,暂时无法解决。
遗留问题:字体大小为32X32点阵时,部分汉字无法正常显示。
整改时间:2007-08-222.屏的补发机制测试内容:测试屏幕的补发机制。
测试环境:LED显示屏、计算机、USB转232线、显示屏数据线。
测试方法:在串口直连的条件下,发送数据并手动断开数据线,测试屏幕的补发机制。
详细说明:添加20屏数据,发送给显示屏。
当发送到第10屏时,手动断开数据线,检查软件是否有补发的数据。
当补发到第10次时,手动连接数据线,检查是否能继续发送屏数据并正确显示。
测试结果:测试结果正常。
遗留问题:无整改时间:无3.屏的复位机制测试内容:测试屏幕的复位机制。
测试环境:LED显示屏、计算机、USB转232线、显示屏数据线。
测试方法:在串口直连的条件下,发送数据并手动断开数据线,使发送失败,测试屏幕的复位机制。
详细说明:添加20屏数据,发送给显示屏。
当发送到第10屏时,手动断开数据线,使本次发送失败,检查屏幕是否能正确显示老的屏信息。
Smart Source Engineering Ltd.
Your Smart Power Solution Source LED Driver Design with iW3620_24V/300mA
Summary and Features :
1.LED driver, 24V, 0.3A; Wide AC input range: 90Vac-264Vac
2.For Isolated Applications
3.High Efficiency and Least Parts Solution
4.Meet EMI Requirement (EN55015BQP&AV scan)
5.Fully Protection Against AC input UV/OV,O/P Short &Open, Component single fault
Technology & Service
SSE
1. Specification
40
°C
KV 3
Sec
Hi-pot test
Free convection, sea level
T opr
Operation temperature
Meets EN55015B
Conducted EMI Vin=230Vac
Turn on Delay Time Harmonic meet IEC61000-3-20.7
PF
Power Fact
%80
η
Efficiency Auto-restart
mA I OUT_MAX
Over Current Protection W 7.2P OUT Continuous Output Power Total Output Power
mA 300I OUT_CV Output
Current
Min Vout is depend on Vcc
V
V OUT_CV Output
Voltage
Const Current A I OUT_CV Output
Current Measured at the PCB connector
V 24V OUT_CV Output
Voltage
Const Voltage Output
W
Open-load Input Power
(264V AC )Hz 63
50
47
f LINE
Frequency
2 Wire
V AC 264100/23090V IN Voltage
Input Comment
Units
Max
Typ
Min
Symbol
Description
SSE 2.Schematic circuit
100uF/ 35V 27K
HER203 2.0R
3.Circuit Board Photograph
SSE
Top side
iw3620
Bottom side
SSE
MATERIALS:
1.Core : EE16(Ferrite Material TDK PC40 or equivalent)
2.Bobbin : EE16 Vertical
3.Magnet Wires : Type 2-UEW
yer Insulation Tape :3M or equivalent.SCHEMATIC
A 102T
36T
16T
ELECTRICAL SPECIFICATIONS:
1.Primary Inductance (Lp) = 1.0mH @10KHz
2.Primary Leakage Inductance (Lk)≤20uH@10KHz FINISHED :
1.Varnish the complete assembly
2.Core is connected to pin4 ( primary GND)
3.
The secondary wire
12
35
Primary
Bias
4.Transformer Design
2UEW 0.21mm 34T –Primary
2UEW 0.21mm 34T –Primary
X(S)B(F)
B
Copper Foil 7.5(W)X25(L)mm
A(S)
5(F)2(S)1(F)
5(S)电气同名端
2UEW 0.22mm*2 16T –Bias
0.2mmx118T –Secondary Triple Insulation wire
0.2mmx118T –Secondary Triple Insulation wire
3(S)2UEW 0.21mm 34T –Primary
X(F)
Cuffing Tape {45(L)x18(W)}mm
Finished Assembly
Fold up both side of Tape
Cut Copper Foil(7.5x25x0.05)mm
SSE
Item Qty.Ref.Description
12C1,C210uF,200V,E-CAP,105℃21C30.1uF,400V
31C41nF,1KV,Capacitor
41C5160pF,50V,NPO,SMD-0603 51C647pF,50V,X7R,SMD-0805 61C8 4.7uF,25V,NPO,SMD-1206 71C7470pF,50V,SMD-0805 81C947pF,50V,X7R,SMD-0805 91C10100uF,35V,E-CAP,105℃101C1147pF,100V ,SMD-0805 111CX10.1uF/275V X Capacitor 121CY1Y-CAP 1nF 250V
133D1,D2,D3RS1M, SMD
141D4RS1M , SMD
151D5RS1D 1A/200V,SMD 161D6HER203
171F12A/250Vac Fuse
181BDR1ABS8Item Qty.Ref.Description
192L1,L2 4.7mH(6*8) (0.12*1 380T)
201Q1FTU04N60C TO-251
212R2,R1 4.7K,SMD-0805
232R3,R4560KΩ+/-5%,SMD-1206
251R5100KΩ+/-5%,SMD-1206
261R647Ω+/-5%,SMD-0805
271R7 1.5KΩ+/-5%,SMD-0805
281R8 2.0R+/-1%,SMD-1206
291R920KΩ+/-5%,SMD-0805
301R1010Ω+/-5%,SMD-0805
311R1127KΩ+/-5%,SMD-0805
321R12 3.6KΩ+/-5%,SMD-0805
331R1327KΩ+/-1%,SMD-0805
341T1EE16 Transformer
351U1Iw3620,Off-line digital PWM controller,SOT-8
5. Bill of Material
SSE
6. Differential Mode Inductor
Ferrite core size : AxB 6x8mm Wire gauge: 0.12mm, 380Turns Inductance @10kHz, 1V: 4.7mH +/-20%ICR: xxx OHM +/-20%
Differential mode inductor L1,L2
SSE
Eff-V
010203040506070809010085
95
105
115
125
135
145
155
165
175
185195205215225235245255265
Vin(Vac)
E f f (%)7. Regulation, Efficiency Measurement
* Note: Output voltage measured at end of PCB.
SSE
V IN =230V AC , T AMB =25℃
V IN =110V AC , T AMB =25℃8. Output VI Characteristics
* Note: Output voltage measured at PCB end, T AMB =25 ℃
V-I Curve
6
7891011121314150
50
100150200250300350400450500550
Iout
Vout
V-I Curve
6
7891011121314150
50100150200250300350400450500550
Iout
Vout
SSE
Vin Vs PF
00.10.20.30.40.50.60.70.80.9180
90
100
110
120
130
140
150
160
170180190200210220230240250260270
Vin
PF
9. Input voltage VS Power Fact curve
QP Limit QP scan L
QP Limit QP scan N
AV Limit AV scan L AV Limit AV scan N。