关于曲柄滑块机构固定铰链中心点A的讨论
- 格式:docx
- 大小:38.67 KB
- 文档页数:4


第二章 机构的结构分析题2-11 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-11a)2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故 3=n 3=l p 1=h p01423323=-⨯-⨯=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-11b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-11c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-11d)。
11(c)题2-11(d)5364(a)5325215436426(b)321讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。
题2-12 图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。

模拟试题八(机械原理A)一、判断题(10分)[对者画√,错者画×]1、对心曲柄滑块机构都具有急回特性。
()2、渐开线直齿圆柱齿轮的分度圆与节圆相等。
()3、当两直齿圆柱齿轮的安装中心距大于标准中心距时,为保证无侧隙啮合,应采用正传动。
()4、凸轮机构中当从动件的速度有有限量突变时,存在柔性冲击。
()5、用飞轮调节周期性速度波动时,可将机械的速度波动调为零。
()6、动平衡的转子一定满足静平衡条件。
()7、斜齿圆柱齿轮的法面压力角大于端面压力角。
()8、加工负变位齿轮时,齿条刀具的分度线应向远离轮坯的方向移动。
( )9、在铰链四杆机构中,固定最短杆的邻边可得曲柄摇杆机构。
()10、平底直动从动件盘状凸轮机构的压力角为常数。
()二、填空题(10分)1、机构具有确定运动的条件为________________________。
2、平面八杆机构共有_________瞬心。
3、渐开线齿廓上最大压力角在________圆上。
4、当行程速比系数K=1.5时,机构的极位夹角θ=__________。
5、举出两种可实现间歇运动的机构。
________________________。
6、偏置滚子(尖顶)直动从动件盘状凸轮机构的压力角表达式tgα=______。
7、渐开线齿轮的齿廓形状与哪些参数有关?_____________。
8、机械中安装飞轮的目的是_____________。
9、直齿圆锥齿轮的当量齿数Zv=__________。
10、在连杆机构中处于死点位置的γ=__________;α=__________。
三、简答题(10分)1、为了实现定传动比传动,对齿轮轮廓曲线有什么要求?2、计算机构自由度时有哪些注意事项?3、计算混合轮系传动比有哪些步骤?4、铰链四杆机构中存在双曲柄的条件是什么?5、机构等效动力学模型中的四个等效量有哪些?分别是根据何种原理求得?四、计算如图8.1发动机配气机构的自由度。
(8分)图8.1图8.2五、在图示8.2的回归轮系中,已知:Z1=20,Z2=48,m1= m2=2mm,Z3=18,Z4=36,m3= m4=2.5mm该两对齿轮均为标准渐开线直齿圆柱齿轮,且安装中心距相等。


机械原理课程机构设计实验报告题目:曲柄滑块机构的运动分析及应用小组成员与学号:刘泽陆(********)陈柯宇(11071177)熊宇飞(11071174)张保开(11071183)班级:1107172013年6月10日摘要 (3)曲柄滑块机构简介 (4)曲柄滑块机构定义 (4)曲柄滑块机构的特性及应用 (4)曲柄滑块机构的分类 (8)偏心轮机构简介 (9)曲柄滑块的动力学特性 (10)曲柄滑块的运动学特性 (11)曲柄滑块机构运行中的振动与平衡 (14)参考文献 (15)组员分工 (15)摘要本文着重介绍了曲柄滑块机构的结构,分类,用途,并进行了曲柄滑块机构的动力学和运动学分析,曲柄滑块机构的运动学特性分析,得出了机构压力表达式,曲柄滑块机构的运动特性分析,得出了滑块的位移、速度和加速度的运动表达式。
最后,对曲柄滑块机构运动中振动、平衡稳定性等进行了总结。
关键字:曲柄滑块动力与运动分析振动与平稳性ABSTRACTThe paper describes the composition of planar linkage, focusing on the structure, classification, use of a slider-crank mechanism and making the dynamic and kinematic analysis, kinematics characteristics of the crank slider mechanism analysis for a slider-crank mechanism, on one hand , we obtain the drive pressure of the slider-crank mechanism ,on the other hand,we obtain the expression of displacement, velocity and acceleration of movement. Finally, the movement of the vibration and balance stability of the crank slider mechanism are summarized.曲柄滑块机构简介曲柄滑块机构定义曲柄滑块机构是铰链四杆机构的演化形式,由若干刚性构件用低副(回转副、移动副)联接而成的一种机构。
浅谈按最佳传动角设计偏置曲柄滑块机构在连杆机构中,传动角的大小是衡量机构传力性能好坏的一个重要指标。
如何使机构在保证运动要求的前提下,获得最佳的传动性能,是设计者必须考虑的问题。
从按行程速比系数K设计偏置曲柄滑块机构的基本原理图出发,建立了求解最佳辅助角*和最佳传动角(min)max 的解析方法,并据此给出了不同K值对应的*和(min)max值以及相应的线图,在设计时比较方便、实用。
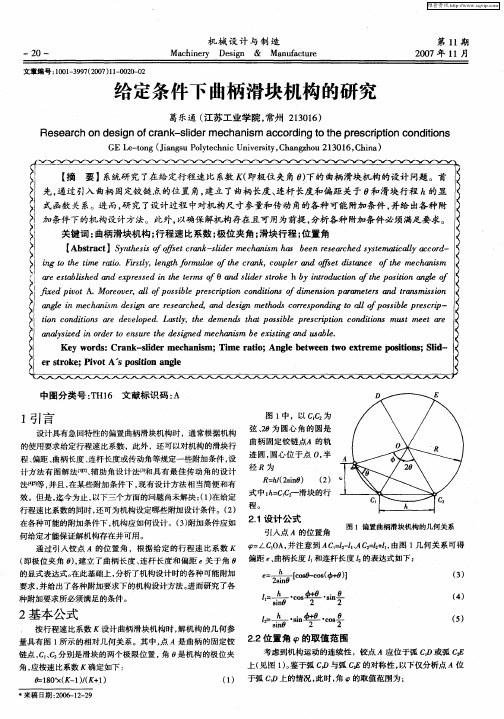
1解析公式1.1几何尺寸关系图1为按行程速比系数K设计偏置曲柄滑块机构的基本原理图。
图中H为滑块行程,C1、C2为滑块的两极限位置,圆弧为满足给定K值(对应的极位夹角=180(K-1)/(K+1))的曲柄固定铰链中心点A的集合。
为建立解析公式,引入辅助角。
根据■AC1C2中的几何关系,容易得到曲柄、连杆的长度a、b和偏距e大小的计算公式:a=H[sin(+)-sin]/(2sin)b=H[sin(+)+sin]/(2sin)e=Hsin(+)sin/sin(1)可见,在H和已知的情况下,a、b和e的大小只与辅助角有关。
为保证机构运动连续性,的取值范围是:090-(2)即:曲柄固定铰链中心点A只能在圆弧C1E上选取。
1.2最佳传动角(min)max位置的确定许多文献中已阐明:当曲柄运动到与C1C2垂直的位置AB时,机构传动角为最小值min。
cosmin=a+eb=sin(+)sin+cos(+2)sin2sin(+2)cos2(3)为求min的最大值(min)max,将式(3)对求导,经整理后得:dcosmind=-cos3(+2)+cos(+2)(1+sin22)-sin2sin2(+2)cos2(4)令式(4)为0,有:cos3(+2)-cos(+2)(1+sin22)+sin2=[cos2(+2)+sin2cos(+2)-1][cos(+2)-sin2]=0(5)即:当满足式(5)时,min取得极限值。
其解为:cos(+2)=sin2(6)或:cos(+2)=-sin2+sin22+42(7)或:cos(+2)=-sin2-sin22+42(8)对于式(8),因为sin22+42,则cos(+2)-1,无意义。
华东理工大学网络教育学院机械原理课程阶段练习二(第5-6章)第五章平面连杆机构及其设计一:选择题1、铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和( A )其他两杆长度之和。
A <=;B >=;C > 。
2、当行程速度变化系数k B时,机构就具有急回特性。
A <1;B >1;C =1。
3、当四杆机构处于死点位置时,机构的压力角( B ).A.为0o;B.为90o;C.与构件尺寸有关.4、对于双摇杆机构,最短构件与最长构件长度之和( A )大于其余两构件长度之和.A.一定;B.不一定;C.一定不.5、若将一曲柄摇杆机构转化为双曲柄机构,可将( B ).A.原机构曲柄为机构;B.原机构连杆为机架;C.原机构摇杆为机架.6、曲柄摇杆机构处于死点位置时( B )等于零度.A.压力角;B.传动角;C.极位角.7、偏置曲柄滑动机构中,从动件滑动的行程速度变化系数K( A )1.A.大于;B.小于;C.等于.8、曲柄为原动件的曲柄摇杆机构, 若知摇杆的行程速比系数K=1.5,那么极位角等于( C ).A.18;B.-18;C.36;D.72.9、曲柄滑块机构的死点只能发生在( B ).A.曲柄主动时;B.滑块主动时;C.连杆与曲柄共线时.10、当曲柄为主动件时,曲柄摇杆机构的最小传动角 min总是出现在( C ).A.连杆与曲柄成一条直线;B.连杆与机架成一条直线时;C.曲柄与机架成一条直线.11、四杆机构的急回特性是针对主动件作( A )而言的.A.等速运动;B.等速移动;C.与构件尺寸有关.12、平面连杆机构的行程速比系数K值的可能取值范围是( C ).A 0≤ K≤1B 0≤ K≤2C 1≤ K≤3D 1≤ K≤213、摆动导杆机构,当导杆处于极限位置时,导杆( A )与曲柄垂直.A.一定;B.不一定;C.一定不.14、曲柄为原动件的偏置曲柄滑动机构,当滑块上的传动角最小时,则( B ).A.曲柄与导路平行;B.曲柄与导路垂直;C.曲柄与连杆共线;D.曲柄与连杆垂直.15、在曲柄摇杆机构中,若增大曲柄长度,则摇杆摆角将( A )A.加大;B.减小;C.不变;D.加大或不变.16、铰链四杆机构有曲柄存在的必要条件是( A )A.最短杆与最长杆长度之和小于或等于其他两杆长度之和B.最短杆与最长杆长度之和大于其他两杆长度之和C.以最短杆为机架或以最短杆相邻的杆为机架二:填空题1、平面四杆机构有无急回特性取决于极位夹角θ的大小.2、曲柄滑快机构,当以滑块为原动件时,可能出现死点。
机械原理复习题一、判断题[对者画√,错者画⨯ ]1、在刚性转子中,满足静平条件的转子一定满足动平衡条件。
()2、四杆机构中,当行程速比系数K>0时一定有急回特性。
()3、平面低副具有两个自由度,一个约束。
()4、一对渐开线直齿圆柱齿轮当α1≠α2,m1≠m2时,该对齿轮有时也能正确啮合。
()5、用飞轮调节周期性速度波动,永远不能达到匀速转动。
()6、等效力矩是根据动能相等的原理求得的。
()7、在四杆机构中,当最短杆长度与最长杆长度之和大于其余两杆长度之和时,固定最短杆的邻边,该机构为曲柄摇杆机构。
()8、平底摆动从动件凸轮机构的压力角永远为零。
()9、当机械效率小于1大于0时,机构即发生自锁。
()10、一对外啮合斜齿圆柱齿轮传动,两轮螺旋角旋向必一致。
()11、平面高副具有两个自由度,一个约束。
()12、将相对速度为零,绝对速度非零的瞬时重合点称为绝对瞬心。
()13、当刚性转子的离心惯性力向量和为零时,该转子满足静平衡条件。
()14、当行程速比系数K>1时,机构一定有急回特性。
()15、机构处于死点位置时,其机构中的传动角为零。
()16、斜齿圆柱齿轮的法面模数小于端面模数。
()17、渐开线直齿圆柱齿轮的负变位齿轮其分度圆齿厚比标准齿轮的分度圆齿厚宽。
()18、直齿圆锥齿轮的传动比与齿顶圆锥角有关。
()19、对周期性速度波动调节时,其飞轮应装在主轴上。
()20、凸轮机构中从动件的余弦运动规律无冲击。
()21、平面低副具有两个自由度,一个约束。
()22、将相对速度为零,绝对速度也为零的瞬时重合点称为绝对瞬心。
()23、当刚性转子的离心惯性力向量和为零时,该转子满足动平衡条件。
()24、当行程速比系数K>0时,机构一定有急回特性。
()25、单销六槽的槽轮机构其运动系数小于0.5。
()26、一对渐开线直齿圆柱齿轮刚好连续传动的重叠系数εα=1。
()27、渐开线直齿圆柱齿轮的正变位齿轮其分度圆齿厚比标准齿轮的分度圆齿厚宽。
铰链四杆机构的基本型式有哪几种曲柄摇杆机构,传动特点:曲柄整周转动,摇杆往复摆动。
双曲柄机构,传动特点:主动曲柄连续等速转动,从动曲柄一般不等速转动。
双摇杆机构,传动特点:两连架杆均作往复摆动。
铰链四杆机构可以通过哪几种方式演化为其他型式的四杆机构①改变构件的形状和相对尺寸②改变运动副的尺寸③选用不同构件作为机架。
铰链四杆机构曲柄存在的条件是什么(①最短杆为机架或连架杆②最短杆与最长杆的长度之和小于或等于其余两杆长度之和。
5.4何谓四杆机构的压力角和传动角压力角:四杆机构中,从动杆上受力点所受力的方向与改点速度方向之间的夹角。
传动角:连杆与从动杆轴线之间所夹得锐角。
铰链四杆机构中有可能产生死点位置的机构有哪些他们发生死点的位置条件是什么:曲柄摇杆机构,若以摇杆为主动件,当连杆与曲柄处于共线位置时产生死点。
曲柄滑块机构:以滑块为主动件时,传动角为零时产生死点。
平行四边形机构:曲柄与连杆共线。
传动角为零,产生死点。
当给定连杆两个位置时,设计的铰链四杆机构可以有无穷多,若要有唯一确定解。
可以附加哪些条件给定连杆两个位置,附加条件:最小传动角,曲柄或摇杆长度,固定铰链中心A、D的位置范围要求,主从动件的转角。
》写出正弦机构和正切机构的传动特性式和传动表达式;从结构上如何区别正弦机构和正切机构正弦机构:S=asinΦ正切机构:S=atanΦ区别:正弦机构推杆的工作面为一个面,摆杆的工作面为一球面。
正切机构则相反,推杆工作面是一球面,摆杆工作面为一平面。
何谓机构的原理误差原理误差:仪器中采用机构的传动特性与要求传动特性不相符而引起的仪器误差。
;图5-40所示铰链四杆中,已知BC=50mm,CD=35mm,AD=30mm,AD为计架。
问:⑴若此机构为曲柄摇杆机构,且AB为曲柄,求AB的最大值。
⑵若此机构为双曲柄机构,求AB的最小值。
⑶若机构为双摇杆机构,求AB的值。
⑴AB为最短杆<AB+BC≤AD+CD,AB≤15,AB最大值15mm⑵AD最短杆AD+BC≤AB+CD,30+50≤AB+35,AB≥的最小值为45mm⑶①AB为最短杆,AB<30,AB+50>30+35,AB>15,15<AB<30)②AB非最短杆、最长杆,AB>30,AB<5030+50>AB+35.,AB<45,30<AB<45③AB为最长杆,AB>50.AB+30>50+35,AB>55AB不应大于其余3杆长度之和,AB<115。
关于曲柄滑块机构固定铰链中心点A的讨论
卢其炎;常勇
【摘要】针对曲柄滑块机构,系统、深入地讨论曲柄固定铰链中心点A的不可落脚区域和“伪机构解组”问题,深化对该机构学基本问题的理解和认识.
【期刊名称】《重庆科技学院学报(自然科学版)》
【年(卷),期】2012(014)002
【总页数】2页(P130-131)
【关键词】曲柄滑块机构;行程速比系数;辅助角方法;不可落脚区域;伪机构解组
【作者】卢其炎;常勇
【作者单位】集美大学机械工程学院,厦门361021;集美大学机械工程学院,厦门361021
【正文语种】中文
【中图分类】TH112
长期以来,按行程速比系数K设计曲柄滑块机构,一直是人们感兴趣和热衷于研
究的理论课题[1-7]。
图解设计法的基本原理如图1所示。
其中:C1、C2为滑
块的两极限位置;lC1C2=h,为滑块行程;过C1、C2的圆周为满足给定系数K
的曲柄固定铰链中心点A落居的圆周。
在文献[1]中,作者曾以图解设计原理和“辅助角方法”为理论基础,研究围绕曲柄固定铰链中心点A的可落脚区域问题。
例1已知滑块行程h=160mm,行程速比系数K=1.25,试设计平面曲柄滑块机构。
文献[1]中,引据“辅助角方法”[1-2]的设计公式:取用UV弧上的A#点——辅助角λ=75°(如图2所示),计算得一组机构尺寸解[1]:
文献[1]指出,该解组实际上是一个“伪机构解组”,因据其和文献[1]中式(4)算得的
已不满足原设计问题,即与设计条件h源=160mm,K源=1.25相矛盾。
从而得出明确结论,UV虚线弧段——辅助角取值范围:
对应着曲柄固定铰链中心点A的不可落脚区域。
接续文献[1]的讨论,作下面更进一步思考:
如上所述的机构尺寸解组l1伪、l2伪和e伪,仅仅是一“伪机构解组”?其与原设计问题之间是否存在
从图解设计原理出发,通过研究和探索,得到如下结论:
(1)如上所述的机构尺寸解组 l1伪、l2伪和e伪——“伪机构解组”,其对应的h伪、K伪的几何直观可作图求得。
如图2所示,以点 A#为圆心,以 lA#C1(=l2伪-l1伪)和lA#C2(=l2伪+l1伪)为半径,分别交C1C2及其延长线于C1#、C2#点。
于是有
由θ伪及公式K=(180°+θ)/(180°-θ)可算得 K伪。
如图2所示,对应有两个“伪机构解组”:
“伪机构解组”一:A#C1、A#C2#——曲柄与连杆分别呈重叠、拉直共线位置;“伪机构解组”二:A#C1#、A#C2——曲柄与连杆分别呈重叠、拉直共线位置。
显而易见,C1#C2、C1C2#对应着滑块的两个非连通区域——机构的两个非连通区域。
而标志、表征h的滑块两极位 C1、C2,却分别居于 C1#C2、C1C2#两非连通区域内,且分别是C1#C2、C1C2#内距离点A#最近、最远的两极限位置。
换句话说,对应设计得到的两个“伪机构”,滑块3皆无法实现从点C1运动至
点C2,也即存在着大家所熟知的机构运动连续性问题。
关于前面算例,采取如上所述的几何作图求解,所得结果与式(2)所述的解析计算结果完全一致。
(2)如图 2所示,因为恒有
当点A#自点U开始,沿UE弧段逐渐向点E移动过程中:
“伪机构解组”一:点C1#由远离点C2,沿C1C2严格单向向右移动,逐渐趋近于点C2;
“伪机构解组”二:点 C2#由远离点 C1,沿 C2#C1严格单向向右移动,逐渐趋
近于点C1。
对应之,h伪、θ伪和K伪皆呈严格单调递减变化,其值由h伪≈h源、θ伪≈θ
源和K伪≈K源始,逐渐递减至 h伪≈0、θ伪≈0 和 K伪≈1。
(3)当点A#取在UV弧段的中点E时,曲柄长度l1伪等于0,此时机构已不存在,或者说已无机构学上的意义。
因VE、UE两弧段相对于中点E对称,故此完全可参照UE弧段讨论,不再赘述。
文中针对曲柄滑块机构固定铰链中心点A的不可落脚区域和“伪机构解组”问题,进行了系统、深入的讨论,采取几何作图求解方法解释了“伪机构”的运动连续性问题,深化了关于曲柄固定铰链中心点A可选择区域的理解和认识。
Key words:slider-crank structure;distance speed coefficient;auxiliary angle;infeasible selection areas;pseudo-structure solution system
【相关文献】
[1]常勇,李延平.关于曲柄滑块机构固定铰链点的位置问题[J].机械设计,2005,22(9):36-37.
[2]刘远伟,常勇,李延平.按行程速比系数K设计平面曲柄滑块机构的解析法[J].机械设
计,1996,13(10):10-13.
[3]李明,赖尚丁,李春晔.也谈同时按K和[α]设计平面曲柄滑块机构的解析法[J].机械设
计,2001,18(6):35-36.
[4]胡爱萍,陈权,邹昊.同时按K和[α]设计平面曲柄滑块机构的解析法[J].机械设计,2000,17(1):33-34.
[5]韩继光,王贵成.行程速比系数设计曲柄滑块机构的解析法[J].机械设计,2004,21(12):55-56.
[6]赖丽,刘宁,邓砖,段钦华.曲柄滑块机构急回设计的研究[J].机械工程师,2006(6):35-37.
[7]王怀奥,周欣.急回四杆机构综合综述 [J].佳木斯大学学报:自然科学版,2005,23(2):297-300.
[8]王知行,邓宗全.机械原理:第2版[M].北京:高等教育出版社,2006:81-82.
[9]孙桓,陈作模,葛文杰.机械原理:第7版[M].北京:高等教育出版社,2006:12-132.
Abstract:Aimingatslider-crank structure,this paper discusses infeasible selection areas and"pseudo-structure solutionsystem"of thecenterAof
crankhinge,andemphasizestheunderstandingandknowledgeaboutthisproblem.。