11.3正逆运动学、轨迹规划
- 格式:pdf
- 大小:2.11 MB
- 文档页数:9

机械手臂的运动学逆解与轨迹规划算法研究近年来,随着工业自动化的迅速发展,机械手臂在生产制造等领域扮演着越来越重要的角色。
而机械手臂的运动学逆解与轨迹规划算法研究则是实现机械手臂自动控制的基础。
本文将对这一领域的研究进行探讨,分析其意义和挑战,以及目前的研究成果。
第一部分:运动学逆解机械手臂的运动学逆解是指在给定的目标位置和姿态时,求解机械手臂的关节角度。
这一问题在机械手臂的运动控制中至关重要。
传统的运动学逆解方法包括解析法和数值法。
解析法是一种基于数学模型的精确解法。
通过建立机械手臂的几何模型和运动方程,可以通过一系列的数学运算得到逆解。
然而,由于机械手臂的结构和约束条件复杂多样,解析法往往无法得到解析解,使得这种方法适用性有限。
数值法则是通过迭代计算的方式求解运动学逆解。
典型的数值法包括牛顿-拉夫逊法和雅可比逆法。
这些方法通过不断迭代,逼近目标位置和姿态,直至达到精确解。
数值法具有较广泛的适用性和可靠性,但计算量大,收敛速度较慢。
第二部分:轨迹规划在机械手臂执行任务时,需要按照既定的路径运动。
轨迹规划是指在给定的起始点和终止点之间,找到一条连续且平滑的路径。
这条路径需要考虑机械手臂的结构、约束条件以及运动速度、加速度等因素。
常见的轨迹规划算法包括直线插补、圆弧插补和样条插补等。
直线插补是最简单的一种方法,直接连接起始点和终止点,但在复杂任务中效果有限。
圆弧插补则通过构建多个圆弧段来实现平滑路径,但只适用于特定情况。
样条插补是一种更加通用的轨迹规划方法。
它通过建立机械手臂的位置和速度函数,并通过控制点来拟合曲线,实现路径规划。
样条插补具有较好的平滑性和连续性,适用于各种复杂任务。
第三部分:研究进展与挑战在机械手臂的运动学逆解与轨迹规划算法研究领域,近年来取得了许多重要进展。
越来越多的研究者致力于提出新的算法和方法,以提高运动学逆解的精准度和轨迹规划的效果。
同时,这一领域也面临着许多挑战。
首先,机械手臂的结构和约束条件多样化,需要针对不同的情况进行逆解和轨迹规划。


SCARA工业设计计算说明书SCARA工业设计计算说明书1、引言这个文档旨在提供关于SCARA(Selective Compliance Assembly Robot Arm)工业的设计和计算的详细说明。
本文档将涵盖的设计原理、运动学计算、动力学计算、控制系统、安全性考虑以及其他相关内容。
2、设计原理2.1 结构设计在设计SCARA工业时,需要考虑的结构类型和材料选择。
此章节将详细描述SCARA的结构设计原理和相关参数。
2.2 运动学原理SCARA的运动学是学中重要的一部分。
此章节将详细讲解运动学原理,包括正逆运动学计算、坐标系选择以及关节角度计算等。
3、运动学计算3.1 正逆运动学计算本章节将介绍SCARA的正逆运动学计算方法及其实际应用。
详细讲解的坐标变换、关节角度计算和工具路径规划等内容。
3.2 轨迹规划在SCARA的应用中,轨迹规划是一个关键的部分。
本章节将介绍常见的轨迹规划算法,并讨论其适用性和实施方法。
4、动力学计算4.1 驱动系统驱动系统是SCARA的核心组成部分之一。
本章节将详细讨论驱动系统的设计和计算,包括电机选择、减速器设计和动力学参数计算等。
4.2 动力学模型动力学模型是的关键组成部分之一。
本章节将介绍SCARA的动力学模型,并详细讨论重要的动力学参数计算和应用方法。
5、控制系统控制系统是SCARA实现精准控制和运动的关键。
本章节将介绍常见的控制系统设计原则和方法,包括PID控制、运动控制算法和通信接口设计等。
6、安全性考虑为了保证SCARA的安全性和人机合作能力,在设计过程中需要考虑相关的安全性因素。
本章节将详细讨论安全性设计原则和相关的安全性机制。
7、其他相关内容本章节将包括SCARA的应用领域、未来发展趋势、经济性评估以及其他相关内容。
附件:本文档涉及的附件包括示意图、计算表格和相关参考资料等。
法律名词及注释:1、SCARA:Selective Compliance Assembly Robot Arm,选择性顺应性装配手臂。

机械臂的运动学与逆运动学分析机械臂是一种能够模拟人类手臂运动的自动化机器人。
它广泛应用于工业领域,用于完成各种复杂的操作任务。
机械臂的运动控制是实现其功能的关键,其中运动学和逆运动学分析是研究机械臂运动的基础。
一、机械臂的运动学分析运动学分析主要关注机械臂的位置、速度和加速度等运动参数的计算。
机械臂主要由关节连接的刚性杆件组成,每个关节可以沿特定方向进行旋转或平移运动。
在机械臂运动学中,我们关注的是机械臂末端执行器的位置和姿态。
1. 正运动学分析正运动学分析指的是根据机械臂各关节的运动参数,计算机械臂末端执行器的位置和姿态。
通常,我们采用坐标变换矩阵的方法来进行计算。
通过将各个关节的运动连续相乘,可以得到机械臂末端执行器相对于机械臂基座标系的位姿矩阵。
以一个3自由度的机械臂为例,设第一关节绕Z轴旋转角度为θ1,第二关节绕Y轴旋转角度为θ2,第三关节绕X轴旋转角度为θ3。
则机械臂末端执行器相对于基座标系的位姿矩阵可以表示为:[cos(θ2+θ3) -sin(θ2+θ3) 0 a1*cos(θ1)+a2*cos(θ1+θ2)+a3*cos(θ1+θ2+θ3)][sin(θ2+θ3) cos(θ2+θ3) 0 a1*sin(θ1)+a2*sin(θ1+θ2)+a3*sin(θ1+θ2+θ3)][0 0 1 d1+d2+d3][0 0 0 1]其中,a1、a2、a3和d1、d2、d3分别为机械臂的长度和位移参数。
通过这个矩阵,我们可以得到机械臂末端执行器的位置和姿态。
2. 速度和加速度分析除了机械臂末端执行器的位置和姿态,机械臂的速度和加速度也是非常重要的运动参数。
通过对机械臂运动学模型的导数运算,我们可以得到机械臂的速度和加速度表达式。
机械臂的速度可以表示为:v = J(q) * q_dot其中,v为机械臂末端执行器的速度向量,J(q)为机械臂的雅可比矩阵,q为机械臂各关节的角度向量,q_dot为各关节的角速度向量。

机械臂运动的轨迹规划摘要空间机械臂是一个机、电、热、控一体化的高集成的空间机械系统。
随着科技的发展,特别是航空飞机、机器人等的诞生得到了广泛的应用,空间机械臂作为在轨迹的支持、服务等以备受人们的关注。
本文将以空间机械臂为研究对象,针对空间机械臂的直线运动、关节的规划、空间直线以及弧线的轨迹规划几个方面进行研究,对机械臂运动和工作空间进行了分析,同时对机械臂的轨迹规划进行了验证,利用MATLAB软件对机械臂的轨迹进行仿真,验证算法的正确性和可行性,同时此路径规划方法可以提高机械臂的作业效率,为机械臂操作提高理论指导,为机器人更复杂的运动仿真与路径规划打下基础。
本文一共分为四章:第一章,首先总结了机械臂运动控制与轨迹规划问题的研究现状及研究方法,归纳了各种轨迹规划的算法及其优化方法,阐述了机械臂的研究背景和主要内容。
第二章,对机械臂的空间运动进行分析研究,采用抽样求解数值法—蒙特卡洛方法,进行机械臂工作空间求解,同时在MATLAB中进行仿真,直观展示机械臂工作范围,为下一章的轨迹规划提供理论基础;同时通过D-H参数法对机械臂的正、逆运动分析求解,分析两者的区别和联系。
第三章,主要针对轨迹规划的一般性问题进行分析,利用笛卡尔空间的轨迹规划方法对机械臂进行轨迹规划,同时利用MATLAB对空间直线和空间圆弧进行轨迹规划,通过仿真验证算法的正确性和可行性。
第四章,总结全文,分析本文应用到机械臂中的控制算法,通过MATLAB 结果可以得出本文所建立的算法正确性,能够对机械臂运动提供有效的路径,而且改进了其他应用于空间机械臂的路径规划问题。
【关键词】运动分析工作空间算法研究轨迹规划ABSTRACTSpace manipulator is a machine, electricity, heat, charged with high integration of space mechanical system integration. With the development of science and technology, especially the birth of aviation aircraft, a robot has been widely used, the trajectory of space manipulator as the support and services to people's attention. This article will space manipulator as the research object, according to the linear motion of the space manipulator, joint planning, space of the straight line and curve, the trajectory planning of several aspects of mechanical arm movement and working space are analyzed, and the trajectory planning of manipulator is verified, the trajectory of manipulator is to make use of MATLAB software simulation, verify the correctness and feasibility of the algorithm, at the same time this path planning method can improve the efficiency of mechanical arm, improve the theoretical guidance for mechanical arm operation, simulation and path planning for robot more complicated movement.This article is divided into four chapters altogether:The first chapter, first summarizes the mechanical arm motion control and path planning problem research status and research methods, summarizes the variety of trajectory planning algorithm and the method of optimization, and expounds the research background and main content of mechanical arm.The second chapter, the paper studied the space motion of mechanical arm, the numerical method, monte carlo method are deduced with the method of sampling, the workspace for mechanical arm is, at the same time the simulation in MATLAB, intuitive display mechanical arm work scope, providing theoretical basis for the next chapter of trajectory planning. At the same time through d-h method of positive and inverse kinematic analysis of the mechanical arm, analyze the difference and contact. The third chapter, mainly aims at the general problem of trajectory planning is analyzed, using cartesian space trajectory planning method for trajectory planning, mechanical arm at the same time, MATLAB is used to analyse the spatial straight line and arc trajectory planning, through the simulation verify the correctness andfeasibility of the algorithm.The fourth chapter, summarizes the full text, analysis of the control algorithm is applied to the mechanical arm in this paper, through the MATLAB results can be concluded that the correctness of algorithm, can provide effective path of mechanical arm movement, and improved the other used in space manipulator path planning problem.[key words] motion analysis,work space,trajectory planning,algorithm research目录摘要......................................................................................................................... - 1 - ABSTRACT .............................................................................................................. - 2 - 第一章绪论............................................................................................................. - 5 - 第一节研究背景及意义.................................................................................. - 5 - 第二节国内外发展现状.................................................................................. - 6 -一、国内现状............................................................................................. - 6 -二、国外现状............................................................................................. - 6 - 第二章机械臂的运动分析..................................................................................... - 8 - 第一节机械臂的正运动学分析...................................................................... - 8 - 第二节机械臂的逆运动学求解.................................................................... - 10 - 第三章五轴机械臂轨迹规划与仿真................................................................... - 11 - 第一节轨迹规划一般问题............................................................................ - 11 - 第二节关节空间的轨迹规划........................................................................ - 12 -一、三次多项式插值法........................................................................... - 12 -二、五次多项式插值............................................................................... - 15 -第三节笛卡尔空间的轨迹规划.................................................................... - 17 -一、空间直线轨迹规划........................................................................... - 18 -二、空间圆弧的轨迹规划....................................................................... - 21 -三、一般空间轨迹规划........................................................................... - 25 - 第四章总结与展望............................................................................................... - 30 - 参考文献................................................................................................................. - 31 -第一章绪论第一节研究背景及意义随着宇宙空间的开发,70 年代美国提出了在宇宙空间利用机器人系统的概念,并且在航天飞机上实施。
第4章机器人轨迹规划本章在操作臂运动学和动力学的基础上,讨论在关节空间和笛卡尔空间中机器人运动的轨迹规划和轨迹生成方法。
所谓轨迹,是指操作臂在运动过程中的位移、速度和加速度。
而轨迹规划是根据作业任务的要求,计算出预期的运动轨迹。
首先对机器人的任务,运动路径和轨迹进行描述,轨迹规划器可使编程手续简化,只要求用户输入有关路径和轨迹的若干约束和简单描述,而复杂的细节问题则由规划器解决。
例如,用户只需给出手部的目标位姿,让规划器确定到达该目标的路径点、持续时间、运动速度等轨迹参数。
并且,在计算机内部描述所要求的轨迹,即选择习惯规定及合理的软件数据结构。
最后,对内部描述的轨迹、实时计算机器人运动的位移、速度和加速度,生成运动轨迹。
4.1 机器人轨迹规划概述一、机器人轨迹的概念机器人轨迹泛指工业机器人在运动过程中的运动轨迹,即运动点的位移、速度和加速度。
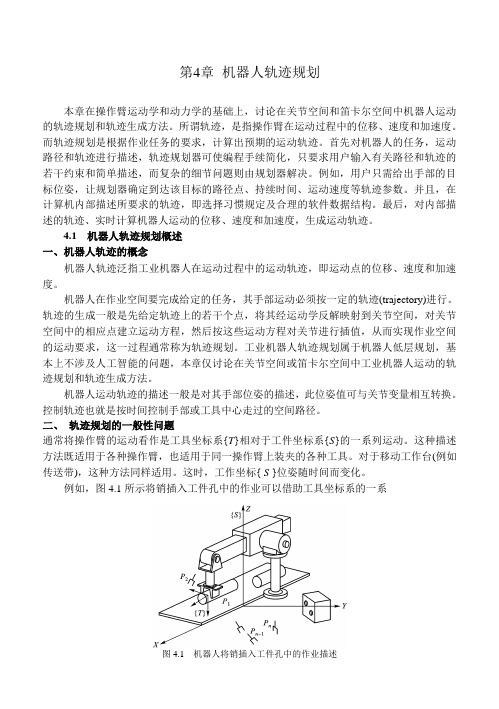
机器人在作业空间要完成给定的任务,其手部运动必须按一定的轨迹(trajectory)进行。
轨迹的生成一般是先给定轨迹上的若干个点,将其经运动学反解映射到关节空间,对关节空间中的相应点建立运动方程,然后按这些运动方程对关节进行插值,从而实现作业空间的运动要求,这一过程通常称为轨迹规划。
工业机器人轨迹规划属于机器人低层规划,基本上不涉及人工智能的问题,本章仅讨论在关节空间或笛卡尔空间中工业机器人运动的轨迹规划和轨迹生成方法。
机器人运动轨迹的描述一般是对其手部位姿的描述,此位姿值可与关节变量相互转换。
控制轨迹也就是按时间控制手部或工具中心走过的空间路径。
二、轨迹规划的一般性问题通常将操作臂的运动看作是工具坐标系{T}相对于工件坐标系{S}的一系列运动。
这种描述方法既适用于各种操作臂,也适用于同一操作臂上装夹的各种工具。
对于移动工作台(例如传送带),这种方法同样适用。
这时,工作坐标{ S }位姿随时间而变化。
例如,图4.1所示将销插入工件孔中的作业可以借助工具坐标系的一系图4.1 机器人将销插入工件孔中的作业描述列位姿P i(i=1,2,…,n)来描述。
282机械设计与制造Machinery Design&M anufacture第4期2021年4月并联机器人正运动学与NURBS轨迹规划张皓宇\刘晓伟、任川、赵彬w(1.辽宁省气象信息中心,辽宁沈阳110168:2.沈阳新松系统自动化股份有限公司,辽宁沈阳110168;3.东北大学信息科学与工程学院,辽宁沈阳110819)摘要:并联机器人是一种具有高栽荷自重比的封闭式运动结构,针对并联机器人运动控制和N U R B S轨迹问题进行了深入的研究,首先从并联机器人的逆运动学问题进行了解析方法的求解其次,针对正运动学(F KP)在教学上是难以解决问题,提出了一种多层感知器进行反向传播学习的神经网络进行实时求解。
再次,开发了基于N U R B S的通用插补器,它可以处理任何类型的几何图形使得机器人运动轨迹平滑。
最后利用实验验证了运动学和N U R B S曲线求解并联机器人模型的正确性。
该策略在少数迭代和很少执行时间内,位置和方向参数的精度分别接近0.01m m和0.01。
,验证了算法的有效性和正确性。
关键词:并联机器人;N U R B S曲线;运动学;神经网络中图分类号:T H16;TP242.3文献标识码:A文章编号:1001-3997(2021 )04-0282-05Forward Kinematics Control and NURBS Trajectory Planning for Parallel RobotsZHANG Hao-yu1,UU Xiao-wei1,REN Chuan1,ZHAO Bin2.3(1.R e s e a r c h e r L e v e l S e n i o r E n g i n e e r o f M e t e o r o l o g i c a l I n f o r m a t i o n Ce nt er,L i a o n i n g Shenyang110168,China;2.SIASUNRo bot&Aut om at io n Co.,L t d.,L i a o n i n g Shenyang110168,China;3.S c h o o l o f I n f o r m a t i o n S c i e n c e&E n g i n e e r i n g,N o r t h e a s t e r n U n i v e r s i t y,L i a o n i n g Shenyang110819,China)A b s tr a c t:Parallel robot is a closed motion structure with a high load to weight ratio.In this paper^the motion control of parallel robot and NURBS trajectory are studied in depth.Firstly,the inverse kinematics o f parallel robot is solved by analytical method.Secondly,the forward kinematics(FKP)is difficult to solve mathematically9this paper proposes a multilayer perceptron back-propagation learning neural network for real-time solution.Thirdly y a universal interpolator based on NURBS is developedy which can handle any type of geometric shapes to make the robot's trajectory smooth.Finally,the correctness of kinematics and NURBS curves for solving parallel robot model is verified by experiments.The accuracy of position and direction parameters of this strategy is close to O.Q\mm and0.Q\o respectively in few iterations and f ew execution time,which verifies the effectiveness and correctness of the algorithm.Key Words-.Parallel Robot;NURBS Curve;Kinematics;Neural Networkl引言并联机构学理论研究蓬勃发展,并联机器人的运动学理论 也不断得到丰富"-31。
机器人正逆动力学-概述说明以及解释1.引言1.1 概述机器人技术的发展已经取得了巨大的突破和进步,机器人已经广泛应用于各个领域,如工业生产、医疗卫生、军事防卫等。
机器人动力学是机器人技术中一个重要的研究领域,它涉及到机器人的运动学和动力学两个方面。
机器人动力学是研究机器人运动学和动力学的学科,其中正逆动力学是机器人动力学的两个重要方向。
机器人正向运动学是机器人学中的一个基本问题,它研究的是给定机器人各个关节的角度和长度以及坐标系之间的关系,从而确定机器人末端执行器的位姿和位置。
通过正向运动学,我们可以确定机器人末端执行器的位置和姿态,从而实现对机器人的控制和指令输入。
相反,机器人逆向运动学则是通过已知机器人末端执行器的位姿和位置,来确定机器人各个关节的角度和长度。
逆向运动学的研究对于机器人的路径规划和避障非常重要,它可以帮助机器人实现多样化的任务和动作。
机器人正逆动力学的研究对于机器人的控制、路径规划和动作执行至关重要。
通过深入研究机器人动力学,我们可以更好地理解机器人的运动规律,提高机器人的运动精度和效率,进而推动机器人技术的发展和应用。
在未来,机器人正逆动力学的研究将面临更多的挑战,如复杂环境下的建模和控制、动态力学的建模和优化等。
但同时也会带来更多的应用前景和发展机会,机器人正逆动力学的研究将有助于推动机器人技术在各个领域的广泛应用。
1.2文章结构1.2 文章结构本文将按照以下结构展开对机器人正逆动力学的讨论。
首先,在引言部分将概述机器人正逆动力学的概念,并介绍本文的目的。
接下来,在正文部分,将深入探讨机器人动力学的概念,并分别介绍机器人正向运动学和逆向运动学的原理和应用。
在结论部分,将总结机器人正逆动力学的重要性,并强调其应用前景和当前研究的方向。
最后,文章将提出未来研究的挑战,展望机器人正逆动力学领域的发展方向。
通过这样的结构安排,读者能够全面了解和理解机器人正逆动力学的基本概念、原理和应用,并对未来研究有一定的了解和思考。
正/逆运动学、轨迹规划
正运动学
一
1SerialLink.fkine(theta); %对已经建立的机器人模型做
运动学分析
正运动学:给定关节坐标求末端执行器的位姿1
正运动学
一
Example 3:puma560
机器人正运动学
>> mdl_puma560 %加载puma560模型
>> qz%零角度
qz= 0 0 0 0 0 0
>> qr%就绪状态,机械臂伸直且垂直
qr=0 1.5708 -1.5708 0 0 0
>> qs%伸展状态,机械臂伸直且水平
qs= 0 0 -1.5708 0 0 0
>> qn%标准状态,机械臂处于灵巧工作状态
qn=0 0.7854 3.1416 0 0.7854 0
>> p560.plot(qn)
>> T=p560.fkine(qn)
T =
0 0 1 0.5963
0 1 0 -0.1501
-1 0 0 -0.01435
0 0 0 1
Puma560标准位形
1SerialLink.ikine6s(T,config); %逆运动学封闭解config:‘l’, ‘ r’左手或右手
逆
运动学
二
逆运动学:给定末端执行器的位姿求关节坐标2
‘u’,‘ d’ 肘部在上或在下
‘f’,‘ n’手腕翻转或不翻转
2 SerialLink.ikine(T); %逆运动学数值解,
奇异位形以及非6关节型
Example 3
:puma560机器人逆运动学
逆运动学
二
>> qul=p560.ikine6s(T) %肘关节在上左手位形
qul = 2.6486 -3.9270 0.0940 2.5326 0.9743 0.3734
>> qur=p560.ikine6s(T,‘ru’) %肘关节在上右手位形
qur= -0.0000 0.7854 3.1416 -0.0000 0.7854 0.0000
>> qdr=p560.ikine(T)%肘关节在下右手位形
qdr =0.0000 -0.8335 0.0940 0.0000 -0.8312 -0.0000
注意:逆解和原始的角度可能不相同。
因为,机器人工具箱中的逆运动学函数并不精确,同时机器人通常有多组逆解,而ikine函数只能求出一组。
1关节空间:jtraj
已知初始和终止的关节角度,利用五次多项式来规划轨迹。
1 [q,qd,qdd] = jtraj(q0,qf,m)
轨迹规划
三
2笛卡尔空间:ctraj
已知初始和终止的末端关节位姿,利用匀加速、匀减速运动来规划轨迹。
1 Tc = ctraj(T0,T1,n)
Example 4:sawyer机器人轨迹规划
init_ang=[0,0,0,0,0,0,0];
targ_ang=[pi/4,-pi/3,pi/5,pi/2,-pi/4,pi/2,pi/3];
step=200;
[q,qd,qdd]=jtraj(init_ang,targ_ang,step);
轨迹规划
三
T0=robot.fkine(init_ang);
Tf=robot.fkine(targ_ang);
subplot(2,4,3);i=1:7;plot(q(:,i));title('位置');grid on;
subplot(2,4,4);i=1:7;plot(qd(:,i));title('速度');grid on;
subplot(2,4,7);i=1:7;plot(qdd(:,i));title('加速度');grid on;
Example 4:sawyer机器人轨迹规划
Tc=ctraj(T0,Tf,step);
Tjtraj=transl(Tc);
subplot(2,4,8);plot2(Tjtraj,'r’);
title('p1p2');grid on;
轨迹规划
三
到直线轨迹
subplot(2,4,[1,2,5,6]);
plot3(Tjtraj(:,1),Tjtraj(:,2),Tjtraj(:,3),'b');grid on;
hold on;
qq=robot.ikine(Tc)
robot.plot(qq);
Example 4:
sawyer
机器人轨迹规划
轨迹规划
三。