最高效的四旋翼无人机数据采集建模
- 格式:docx
- 大小:716.72 KB
- 文档页数:8
基于STM32的四旋翼无人机设计无人机技术的发展已经逐渐成为科技领域的热门话题,而四旋翼无人机则是其中一种应用广泛的无人机类型。
它可以应用于农业、航拍、物流等各种领域,具有很大的市场潜力。
本文将介绍基于STM32的四旋翼无人机设计,讨论其硬件构架和软件系统,希望可以为无人机爱好者提供一些技术方面的参考和帮助。
一、硬件构架1. 电机和螺旋桨四旋翼无人机采用四个电机驱动四个螺旋桨来产生上升力和姿态控制。
选择合适的电机和螺旋桨对于无人机的飞行性能至关重要。
电机需要具备足够的功率和转速来推动螺旋桨产生足够的升力,并且要求响应速度快,可以方便地实现姿态控制。
螺旋桨的尺寸、材质和设计也需要仔细选择和匹配,以确保其具有良好的气动性能和结构强度。
在选用电机和螺旋桨时,还需要考虑整机的配比和平衡,以保证无人机的飞行平稳性和操控性。
2. 传感器系统无人机的传感器系统是其智能化和自主飞行的关键。
常见的传感器包括陀螺仪、加速度计、罗盘、气压计等。
这些传感器可以实现无人机的姿态感知、空间定位和高度控制等功能,从而保证无人机的飞行稳定性和精准性。
在选择传感器时,需要考虑其精度、响应速度、通信接口和适应环境等因素,以保证传感器系统可以满足无人机的实际飞行需求。
3. 控制系统基于STM32的四旋翼无人机设计通常采用飞控主板来实现飞行控制和数据处理。
飞控主板集成了微处理器、传感器接口、无线通信模块等功能,可以实现无人机的自主控制和遥控操作。
在设计控制系统时,需要考虑飞行控制算法、通信协议、数据处理速度等因素。
飞控主板还可以通过扩展接口连接其他外围设备,如GPS模块、避障传感器、摄像头等,实现更丰富的功能和应用。
二、软件系统1. 飞行控制算法飞行控制算法是基于传感器数据和飞行器状态信息,实现对电机转速和螺旋桨姿态的智能控制。
常见的飞行控制算法包括PID控制、自适应控制、模糊控制等。
这些算法可以根据无人机的动力学特性和环境变化,实现稳定的姿态控制、高效的空间定位和精准的高度控制。
基于STM32的微型四旋翼无人机控制系统设计—软件设计首先,需要实现的是飞行控制算法。
飞行控制算法主要包括姿态估计和控制器设计两个部分。
在姿态估计中,通过加速度计和陀螺仪等传感器获取四旋翼的姿态信息,并使用滤波算法对数据进行处理,得到稳定的姿态角数据。
常用的滤波算法有卡尔曼滤波器和互补滤波器等。
在控制器设计中,根据姿态角数据和期望姿态角数据,设计合适的控制算法,生成四个电机的输出信号,以控制四旋翼的姿态。
常用的控制算法有PID控制器和模糊控制器等。
其次,需要实现的是传感器数据的获取和处理。
四旋翼无人机通常配备加速度计、陀螺仪、磁力计和气压计等传感器,用于获取飞行状态相关的数据。
通过I2C或SPI等接口将传感器与STM32连接,然后通过相关的驱动程序读取传感器数据。
读取到的数据可以进行校准和滤波等处理,以提高数据的准确性和稳定性。
最后,需要实现的是控制指令的生成和发送。
控制指令的生成主要根据用户输入的期望飞行状态和传感器反馈的实际飞行状态来确定。
例如,用户输入期望的飞行速度和高度等信息,然后通过控制算法和传感器数据计算得到四电机的输出信号,以控制四旋翼实现期望的飞行动作。
生成的控制指令可以通过PWM信号或者CAN总线等方式发送给四旋翼的电调或者电机。
除了上述的基本功能,还可以根据实际需求增加一些辅助功能,如飞行模式切换、状态显示、数据记录和回放等。
这些功能可以通过开发相关的菜单和界面实现,用户可以通过遥控器或者地面站等设备进行相关操作。
总结起来,基于STM32的微型四旋翼无人机控制系统设计软件设计主要包括飞行控制算法的实现、传感器数据的获取和处理、控制指令的生成和发送等几个方面。
通过合理设计和实现上述功能,可以实现四旋翼无人机的稳定飞行和精确控制。
X型四旋翼无人机建模及四元数控制
丁少宾;肖长诗;刘金根;文元桥
【期刊名称】《系统仿真学报》
【年(卷),期】2015(0)12
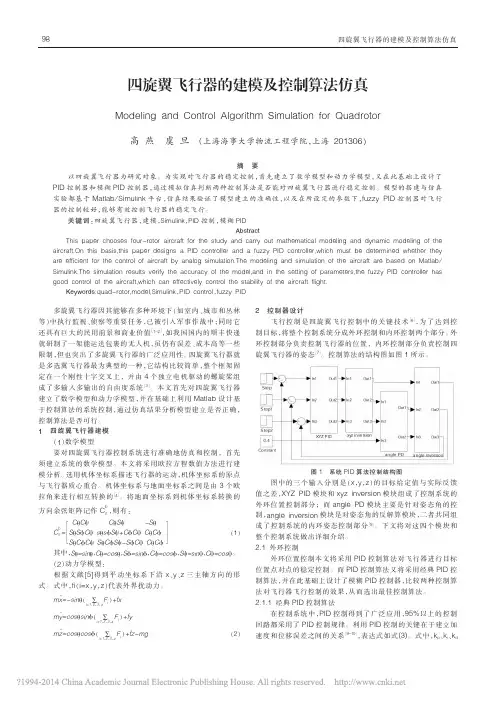
【摘要】对X型四旋翼无人机做了合理假设以及受力分析,推导并建立了X型四旋翼无人机全面的动力学数学模型,考虑了无人机平动、转动空气阻力,并且将转子、螺旋桨和机体看成多刚体系统。
在Solidworks软件中,建立了无人机实物模型以获得无人机惯性参数。
直接以四元数作为反馈控制量,设计出多通道双回路矢量PD 控制系统。
以Matlab/Simulink为平台,对四元数反馈控系统和欧拉角反馈控制系统进行对比控制仿真。
从仿真结果来看,这2种反馈模式都能对无人机模型进行位置、姿态跟踪等控制,但是四元数反馈控制系统具有过渡时间短、计算量少以及无奇点产生的优点。
【总页数】6页(P3057-3062)
【作者】丁少宾;肖长诗;刘金根;文元桥
【作者单位】湖北省内河航运技术重点实验室;武汉理工大学信息工程学院光纤传感技术与信息处理教育部重点实验室
【正文语种】中文
【中图分类】V249.1
【相关文献】
1.四旋翼无人机建模与PID控制器设计
2.超/特高压输电线路巡检四旋翼无人机的建模与回馈递推控制
3.自主巡线四旋翼无人机建模及姿态控制器设计
4.四旋翼无人机的控制原理及建模
5.带单关节机械臂四旋翼无人机的建模与控制
因版权原因,仅展示原文概要,查看原文内容请购买。
无人机三维建模原理随着无人机技术的飞速发展,无人机三维建模成为了一项重要的应用。
无人机三维建模是利用无人机搭载的传感器和摄像机,通过采集大量的图像和数据来构建真实世界的三维模型。
无人机三维建模具有高效、精确和灵活的特点,广泛应用于地理测绘、城市规划、文物保护等领域。
一、数据采集无人机三维建模的第一步是数据采集。
无人机通过搭载的传感器和摄像机,可以获取高分辨率的航拍影像和地面点云数据。
其中,航拍影像是通过无人机在空中拍摄地面景物而获得的,可以提供丰富的纹理和颜色信息;地面点云数据则是通过无人机激光雷达扫描地面而得到的,可以提供地面的几何信息。
二、图像处理采集到的航拍影像需要经过图像处理的过程,以提取出有用的信息。
首先,需要对图像进行去畸变处理,消除由于相机镜头畸变引起的影响。
然后,利用图像匹配算法,将不同视角的图像进行匹配,找出相同的特征点。
通过这些特征点,可以计算出相机的姿态参数和场景的三维结构。
三、点云处理采集到的地面点云数据同样需要进行处理,以提取出地面的几何信息。
首先,需要对点云数据进行滤波处理,去除噪声点和离群点。
然后,利用点云配准算法,将不同视角的点云数据进行配准,得到全局一致的点云模型。
最后,利用点云分割算法,将点云数据分割成不同的物体或地面。
四、三维重建在数据采集和处理的基础上,可以开始进行三维重建。
基于航拍影像的三维重建可以通过多视图几何和三角测量的方法,将特征点的三维位置计算出来,并生成稠密的三维点云模型。
基于地面点云数据的三维重建则可以通过点云配准和点云融合的方法,生成全局一致的地面模型。
五、纹理映射三维重建之后,可以将航拍影像的纹理映射到三维模型上,以增强模型的真实感。
纹理映射的过程中,需要将航拍影像与三维模型进行对应,将影像中的颜色和纹理信息投影到模型的表面上。
这样,生成的三维模型就具有了真实世界的外观。
六、数据融合无人机三维建模的结果往往是多源数据的融合。
通过将航拍影像和地面点云数据进行配准和融合,可以得到更加精确和完整的三维模型。
动态系统建模(四旋翼飞行器仿真)实验报告:动态系统建模(四旋翼飞行器仿真)实验报告院(系)名称大飞机班学号学生姓名任课教师2021年 _月四旋翼飞行器的建模与仿真一、实验原理 I.四旋翼飞行器简介四旋翼飞行器通过四个螺旋桨产生的升力实现飞行,原理与直升机类似。
四个旋翼位于一个几何对称的十字支架前、后、左、右四端,如图1-1所示。
旋翼由电机控制;整个飞行器依靠改变每个电机的转速来实现飞行姿态控制。
在图1-1中,前端旋翼1 和后端旋翼3 逆时针旋转,而左端旋翼2 和右端的旋翼4 顺时针旋转,以平衡旋翼旋转所产生的反扭转矩。
由此可知,悬停时,四只旋翼的转速应该相等,以相互抵消反扭力矩;同时等量地增大或减小四只旋翼的转速,会引起上升或下降运动;增大某一只旋翼的转速,同时等量地减小同组另一只旋翼的转速,则产生俯仰、横滚运动;增大某一组旋翼的转速,同时等量减小另一组旋翼的转速,将产生偏航运动。
图1-1 四旋翼飞行器旋翼旋转方向示意图从动力学角度分析,四旋翼飞行器系统本身是不稳定的,因此,使系统稳定的控制算法的设计显得尤为关键。
由于四旋翼飞行器为六自由度的系统(三个角位移量,三个线位移量),而其控制量只有四个(4 个旋翼的转速),这就意味着被控量之间存在耦合关系。
因此,控制算法应能够对这种欠驱动(under-actuated)系统足够有效,用四个控制量对三个角位移量和三个线位移量进行稳态控制。
本实验针对四旋翼飞行器的悬浮飞行状态进行建模。
II.飞行器受力分析及运动模型(1)整体分析如图1-2所示,四旋翼飞行器所受外力和力矩为:Ø重力mg,机体受到重力沿-Zw方向Ø四个旋翼旋转所产生的升力Fi(i=1,2,3,4),旋翼升力沿ZB方向Ø旋翼旋转会产生扭转力矩Mi (i=1,2,3,4), Mi垂直于叶片的旋翼平面,与旋转矢量相反。
图1-2 四旋翼飞行器受力分析(2)电机模型Ø力模型(1.1)旋翼通过螺旋桨产生升力。
《自动化技术与应用》2021年第40卷第2期辨识建模与仿真Identification Modeling and Simulation一种小型倾转旋翼无人机的建模与仿真黄潇,陈宏,巩伟杰(深圳大学机电与控制工程学院,广东深圳518060)摘要:传统无人机多为四旋翼无人机和固定翼无人机,现设计一种小型可倾转旋翼无人机,可实现垂直起降与悬停,并能在空中高速巡航。
建立该无人机的动力学模型,对该无人机的旋翼飞行模式,设计了基于滑模控制(Sliding Mode Control)的姿态控制器和位置控制器,并通过Matlab仿真和传统的PID算法进行比较验证。
仿真结果表明:基于滑模鲁棒控制的无人机,其姿态收敛过程和位置收敛过程都远快于传统控制方法。
关键词:可倾转旋翼;动力学模型;滑模控制;Matlab仿真中图分类号:TP273;V212.4文献标识码:A文章编号:1003-7241(2021)002-0104-05Modeling and Simulaton of a Small Scale Tilt-Rotor UAVHUANG Xiao,CHEN Hong,GONG Wei-jie(School of Mechanical and Control Engineering,Shenzhen University,Shenzhen518060China)Abstract:Traditional UAV are mostly quad rotor UAV and fixed wing UAV.A small scale tilt-rotor UAV is designed to achieve vertical takeoff and landing and hovering,and can cruise at high speed in the air.The dynamic model of the UAV is established.The attitude control and position controller based on the sliding mode robust control are designed for the tilting transition state of the UAV.The matlab simulation and the traditional pid algorithm are compared and verified.The simulation results show that the attitude convergence process and position convergence process of UAV based on sliding mode robust control are much faster than the traditional control method.Key words:tilt-rotor UAV;sliding mode control;dynamic model1引言随着科技的发展,无人机已经广泛运用到诸多领域。
四旋翼动力学建模一、引言四旋翼无人机是近年来飞行器领域的热门话题,其广泛应用于农业、环保、安全监控等领域。
为了更好地掌握四旋翼的运动规律,需要对其进行建模分析。
本文将介绍四旋翼动力学建模的基本原理和方法。
二、四旋翼结构和工作原理1. 四旋翼结构四旋翼主要由机身、电机、螺旋桨和控制系统等组成。
其中,机身是支撑整个飞行器的主体部分,电机驱动螺旋桨产生升力,控制系统负责调节电机转速和方向。
2. 四旋翼工作原理四旋翼通过调节各个螺旋桨的转速和方向来实现飞行姿态调整和位置控制。
当四个螺旋桨转速相等时,飞行器保持平衡状态;当某一侧或某一角度需要调整时,相应螺旋桨的转速会发生变化以产生所需的力矩。
三、四旋翼运动学建模1. 坐标系选择在进行运动学建模时,需要选择合适的坐标系。
通常选择惯性坐标系和机体坐标系。
惯性坐标系是固定不动的,用于描述四旋翼在空间中的位置和速度;机体坐标系则随着四旋翼运动而改变,用于描述其姿态。
2. 姿态表示四旋翼的姿态通常用欧拉角表示。
欧拉角包括滚转角、俯仰角和偏航角,分别表示飞行器绕x、y、z轴旋转的角度。
3. 运动方程根据牛顿第二定律和欧拉定理,可以得到四旋翼的运动方程。
其中,力和力矩来自于螺旋桨产生的升力和扭矩,阻力主要来自于空气阻力和重力。
四、四旋翼动力学建模1. 动力学方程四旋翼的动力学方程可以通过牛顿第二定律和欧拉定理推导得到。
其中,电机输出扭矩与电机转速成正比;螺旋桨产生升力与螺旋桨转速的平方成正比。
2. 状态空间模型将四旋翼的动力学方程转化为状态空间模型可以方便地进行控制设计和仿真分析。
状态空间模型包括状态向量、输入向量和输出向量,其中状态向量包括四旋翼的位置、速度和姿态等状态变量。
3. 控制系统设计四旋翼的控制系统通常采用PID控制器。
PID控制器由比例、积分和微分三个部分组成,用于调节电机转速和方向以实现飞行姿态调整和位置控制。
五、结论本文介绍了四旋翼动力学建模的基本原理和方法。
四旋翼UA V平台农田信息采集系统设计【摘要】本文以四旋翼无人机(UA V)作为低空农田信息采集的平台,设计了以nRF24L01射频通信芯片为核心的无线数据采集、传输系统,并采用功率放大器AWT6264扩展了数据传输距离.实测传输距离500m处,误帧率为0.74%。
【关键词】四旋翼;无线;信息采集0 引言及时、准确地获取农田环境信息是进行精准农业生产的关键[1]。
目前,实时农田环境信息获取技术远落后于其他支持技术[2]。
卫星遥感受其运行周期限制,时效性较差,难以满足精准农业对局部精准和实时监控的获取要求[3]。
手持式和基于地面车辆的农田信息采集装置由于其功能和视野限制,在田间行走不便,效率相对较低[3-5]。
低空遥感获取技术机动性高、成本低,可以快速、实时检测农田环境,获取分辨率较高的农田信息,在较小范围内实施精准农业的情况下,低空农田信息获取系统有着更好的发展前景[6]。
与固定翼飞机相比,旋翼无人机(UA V)的突出优点是能够垂直起降和实现悬停,而四旋翼无人机可以通过反扭矩作用使无人机扭矩平衡,不需要专门的反扭矩桨,所以这种无人机设计简单,且采用四螺旋桨结构可以提高负载能力。
农田地理环境复杂,如果采用有线方式进行数据传输,则需要架设专门的传输线路,施工、维护难度都较大,而无线信息传输比传统的有线信息传输更为灵活。
因此基于小型四旋翼UA V的农田信息采集平台更具研究意义和实际应用价值[7-8]。
1 农田信息无线采集系统设计农田信息无线传输系统以无线收发模块为基础,由单片机控制,采集农田中温湿度数据,以射频形式发射出去,最后由接收端通过预先设定的协议接收,并通过串口传输到电脑。
无线传输系统结构如图1所示,在地面站对四旋翼无人机进行航迹规划,由四旋翼无人机携带无线发射端巡航至农田指定地点,通过传感器采集温湿度数据再由无线发射模块进行发射,接收端收到数据后通过RS-232串口将数据发送到地面站计算机。
大疆精灵4 RTK航测数据在地形图测绘中的应用作者:艾力杨冰玉来源:《国土资源导刊》2020年第03期摘; 要; 本文以延长县某工程项目地形图测绘为案例,采用Phantom4 RTK无人机进行低空航测作业,通过UAV-PPK软件对航摄成果数据进行解算,获取更高精度的POS数据,有效提高“空三”加密解算质量,再通过ContextCapture软件进行航测内业处理,生成了测区DOM和三维立体模型,最后利用EPS软件在计算机上完成三维裸眼测图,获得测区1:500地形图。
结果表明,利用无人机获取的数据进行测图,最终成果满足相应比例尺地形图成图精度的要求。
关键词; 大疆精灵4 RTK;UAV-PPK;ContextCapture;地形图中图分类号: P231.5 文献标志码: A文章编号:1672-5603(2020)03-62-4Abstract: In this paper, combined with a topographic mapping project in Yanchang County,Phantom4 RTK UAV is used to carry out low altitude aerial survey.The UAV-PPK software is used to obtain higher precision POS data, effectively improve the quality of aerial triangulation encryption solution. TheDOM and 3D model of the survey area is generated by aerial survey data processing with ContextCapture. Finally, EPS software is adopted to complete 3D open eye mapping on the computer, and 1:500 topographic map of the survey area is obtained. Itillustrates that the result,which is obtained by mapping from the data of UAV, can meet the requirements of mapping accuracy of topographic maps with corresponding scale.Keywords: DJI Phantom4 RTK; UAV-PPK; contextCapture; topographic map近年来,低空无人机摄影测量技术发展迅速[1],在各类项目勘测规划实施、项目进度监测中开始被接受并大量应用。
最高效的四旋翼无人机数据采集建模一、简介近年来,微小型四翼无人机已经成为了无人飞行器研究领域的一个热点。
它结构简单、机动性强、便于维护,能够在空中悬停、垂直起飞和降落。
在军用和民用方面具有较大的潜在应用价值,国内外许多研究单位纷纷致力于四旋翼无人机飞行控制的架构设计与飞行控制研究,以实现四旋翼无人机的自主飞行。
机载传感器系统是四旋翼无人机飞行控制系统的重要组成部分,它为机载控制系统提供可靠的飞行状态信息,是实现四旋翼无人机自主飞行的重要设备。
现在无人机应用最广的是倾斜摄影技术优势或者说最吸引用户的,就是利用倾斜摄影技术可以全自动、高效率、高精度、高精细的构建地表全要素三维模型。
二、四旋翼无人机特点1、机动性能灵活,低空性能出色。
能在城市、森林等复杂环境下完成各种任务。
可完成空中悬停监视侦查。
实现对动力要地低,能在狭小空间穿行,能垂直起降,对起降环境要求低。
2、对动力要求较小,产生的噪音低,隐蔽性能高,安全性能出色。
四旋翼无人机采用四个马达提供动力,可使飞行更加稳定和精确。
3、结构简单,运行、控制原理相对容易掌握。
4、成本较低,零件容易更换,维护方便。
三、飞行软件目前无人机种类繁多,针对无人机开发的飞控软件也有很多,目前比较好用的是DJI GS Pro、DJI GO4、Litchi Vue、Pix4d等。
四、数据采集,使用DJI GS pro1、打开DJI GS pro软件,点击新建任务2、点击测绘航拍区域模式3、点击地图选点(飞行定点比较耗飞机电量,无特殊情况建议不使用)4、点击屏幕就会出现一个航测区域,手动拖拽四个定点可以改变航测的面积和形状,同时也可以手动增加拐点,让航测面积更加的灵活多样。
并且在右边的菜单栏里选择好对应的云台相机;设置好任务的高度,任务的高度和拍摄的清晰度,成图的分辨率有很大的关系;大面积的时候尽量选择等时间拍照,因为能上传的航点是有限的。
5、点击进入右侧菜单的高级选项之中,重新设置一下航测的重叠了,一般航向和旁向重叠率是700%和70%(最好不要低于70%);设置好云台俯仰角,正射影像图一般为-90°,拍摄3D立体时一般为-45°;设置好返航高度,确保返航时不会碰撞到障碍物。
无人机倾斜摄影实景三维建模及精度评价摘要:倾斜摄影技术搭配无人机操作能够快速、精准获取项目三维数据,辅助创建三维实景模型,提高模型精度,为项目提供有效参考,为此需要加强倾斜摄影以及三维建模技术研究,保障建模精度,减少工程误差。
文章先分析了无人机倾斜摄影,随后介绍了无人机倾斜摄影实景三维建模以及精度评价,以供参考。
关键词:无人机;倾斜摄影;实景三维建模;精度评价引言:随着无人机技术持续创新发展,逐渐应用于我国各个项目生产当中,三维建模能够帮助快速采集项目信息。
利用无人机搭载专业摄像装置实施倾斜摄影能够帮助有效采集地面影像信息,对点云数据实施全面扫描,相关数据不但能够辅助传统数字测绘,还可以支持三维实景建模。
一、无人机倾斜摄影无人机属于无人驾驶航空器,能够利用计算机系统编程以及无线电控制实施自主操控,在无人机中设置了自动驾驶以及导航设备。
倾斜摄影改变了传统模式下只能进行垂直拍摄的弊端,在无人机中搭载多个传感器,能够从倾斜、垂直等多种角度进行拍摄,从而得到目标地物的立面信息,获得目标物倾斜影像,随后构建模型为人们打造直观世界。
倾斜摄影进一步降低了实景三维建模成本,能够对模型中的对地物原有色彩、纹理进行全面还原,将整个建筑细节以及地貌特征直观呈现出来,促进倾斜摄影在各个工程领域发挥出应有价值。
倾斜摄影所采集的数据能够帮助人们立足于多个角度层面观测建筑,将目标物实际状况真实、全面反映出来,有效弥补人工建模精准度不足问题。
倾斜摄影实际应用较为简便,信息获取快捷,利用无人机平台设置多个传感器能够得到更为全面倾斜影像数据,同时借助专业测量软件实施成果多空间测量,利用倾斜影像信息自动设计DSM以及DLG多样成果。
倾斜摄影利用软件能够快速得到精准实景三维模型,减少成本支出,并利用网络平台促进项目信息全面共享,支持构建实景三维模型。
二、无人机倾斜摄影实景三维建模及精度评价(一)实验流程此次实验区为平地,面积达到20000㎡。
基于四旋翼无人机的单目建模系统庄晓明;李涛;付龙【摘要】为了实现四旋翼无人机的自主飞行、环境单目稠密重建与即时导航功能,文中设计了该单目建模导航系统。
飞行控制器采用MPU6050六轴传感器采集六轴信号,通过算法拟合出飞行器姿态,然后通过STM32F103RBT6芯片分别控制4个电机驱动模块,即时通过PID算法输出PWM值进行调速来实现飞行姿态的稳定和改变。
建模系统通过控制GPS模块,可以获取飞行器的实时位置;飞行器通过图像采集模块,可以获取飞行器的环境信息。
设计了上位机软件,能够接收图像并且进行单目稠密重建。
稠密重建主要由从运动到结构、基础表面构建、约束场景流稠密重建、稠密对齐和局部模型集成共五方面组成,然后通过无线串口与无人机通讯,实现无人机的智能自主飞行。
实验结果表明,该系统能够实现单目建模的功能。
%In order to realize autonomous flight,monocular dense reconstruction and auto navigation of four rotors UAV,the monocular reconstruction and modeling system is designed. The flight controller uses six axis sensors,MPU-6050,to detect the attitude of the four rotors UAV;the speed of the 4 motor drive module is controlled by the STM32F103RBT6 chip to change the attitude of the UAV with PID algorithm. The monocular reconstruction system acquires real-time position and environment information of the UAV by controlling the GPS module and image acquisition module. The software on PC can receive the images and make monocular dense reconstruction. Dense reconstruction contains five main part including structure from motion,basic surfaceconstruction,constrained scene flow dense re-construction and local modelintegration. The intelligent autonomous flight of UAV is realized through communications between the PC and the UAV with wireless serial port. Experiments show that the system can realize monocular dense reconstruction.【期刊名称】《计算机技术与发展》【年(卷),期】2016(026)007【总页数】5页(P104-108)【关键词】四旋翼无人机;智能导航;三维重建;姿态控制【作者】庄晓明;李涛;付龙【作者单位】中科院合肥物质科学研究院先进制造技术研究所,江苏常州213164;中科院合肥物质科学研究院先进制造技术研究所,江苏常州 213164;中科院合肥物质科学研究院先进制造技术研究所,江苏常州 213164【正文语种】中文【中图分类】TP302四旋翼无人机具有垂直起降、自由悬停的特点,并且体积小,操控方便,携带方便,可以进入人不易进入的复杂环境。
动态系统建模(四旋翼飞行器仿真)实验报告院(系)名称大飞机班学号ZY11DF120学生姓名叶心宇任课教师马耀飞2019年12月四旋翼飞行器的建模与仿真一、实验原理I.四旋翼飞行器简介四旋翼飞行器通过四个螺旋桨产生的升力实现飞行,原理与直升机类似。
四个旋翼位于一个几何对称的十字支架前、后、左、右四端,如图1-1所示。
旋翼由电机控制;整个飞行器依靠改变每个电机的转速来实现飞行姿态控制。
在图1-1中,前端旋翼1 和后端旋翼3 逆时针旋转,而左端旋翼2 和右端的旋翼4 顺时针旋转,以平衡旋翼旋转所产生的反扭转矩。
由此可知,悬停时,四只旋翼的转速应该相等,以相互抵消反扭力矩;同时等量地增大或减小四只旋翼的转速,会引起上升或下降运动;增大某一只旋翼的转速,同时等量地减小同组另一只旋翼的转速,则产生俯仰、横滚运动;增大某一组旋翼的转速,同时等量减小另一组旋翼的转速,将产生偏航运动。
图1-1 四旋翼飞行器旋翼旋转方向示意图从动力学角度分析,四旋翼飞行器系统本身是不稳定的,因此,使系统稳定的控制算法的设计显得尤为关键。
由于四旋翼飞行器为六自由度的系统(三个角位移量,三个线位移量),而其控制量只有四个(4 个旋翼的转速),这就意味着被控量之间存在耦合关系。
因此,控制算法应能够对这种欠驱动(under-actuated)系统足够有效,用四个控制量对三个角位移量和三个线位移量进行稳态控制。
本实验针对四旋翼飞行器的悬浮飞行状态进行建模。
II.飞行器受力分析及运动模型(1)整体分析如图1-2所示,四旋翼飞行器所受外力和力矩为:重力mg,机体受到重力沿-Z w方向四个旋翼旋转所产生的升力F i(i=1,2,3,4),旋翼升力沿Z B方向旋翼旋转会产生扭转力矩M i (i=1,2,3,4),M i垂直于叶片的旋翼平面,与旋转矢量相反。
图1-2 四旋翼飞行器受力分析(2)电机模型力模型2i F i F k ω= (1.1)旋翼通过螺旋桨产生升力。
最高效的四旋翼无人机数据采集建模
一、简介
近年来,微小型四翼无人机已经成为了无人飞行器研究领域的一个热点。
它结构简单、机动性强、便于维护,能够在空中悬停、垂直起飞和降落。
在军用和民用方面具有较大的潜在应用价值,国内外许多研究单位纷纷致力于四旋翼无人机飞行控制的架构设计与飞行控制研究,以实现四旋翼无人机的自主飞行。
机载传感器系统是四旋翼无人机飞行控制系统的重要组成部分,它为机载控制系统提供可靠的飞行状态信息,是实现四旋翼无人机自主飞行的重要设备。
现在无人机应用最广的是倾斜摄影技术优势或者说最吸引用户的,就是利用倾斜摄影技术可以全自动、高效率、高精度、高精细的构建地表全要素三维模型。
二、四旋翼无人机特点
1、机动性能灵活,低空性能出色。
能在城市、森林等复杂环境下完成各种任务。
可完成空中悬停监视侦查。
实现对动力要地低,能在狭小空间穿行,能垂直起降,对起降环境要求低。
2、对动力要求较小,产生的噪音低,隐蔽性能高,安全性能出色。
四旋翼无人机采用四个马达提供动力,可使飞行更加稳定和精确。
3、结构简单,运行、控制原理相对容易掌握。
4、成本较低,零件容易更换,维护方便。
三、飞行软件
目前无人机种类繁多,针对无人机开发的飞控软件也有很多,目前比较好用的是DJI GS Pro、DJI GO4、Litchi Vue、Pix4d等。
四、数据采集,使用DJI GS pro
1、打开DJI GS pro软件,点击新建任务
2、点击测绘航拍区域模式
3、点击地图选点(飞行定点比较耗飞机电量,无特殊情况建议不使用)
4、点击屏幕就会出现一个航测区域,手动拖拽四个定点可以改变航测的面积和形状,同时也可以手动增加拐点,让航测面积更加的灵活多样。
并且在右边的菜单栏里选择好对应的云台相机;设置好任务的高度,任务的高度和拍摄的清晰度,
成图的分辨率有很大的关系;大面积的时候尽量选择等时间拍照,因为能上传的航点是有限的。
5、点击进入右侧菜单的高级选项之中,重新设置一下航测的重叠了,一般航向和旁向重叠率是700%和70%(最好不要低于70%);设置好云台俯仰角,正射影像图一般为-90°,拍摄3D立体时一般为-45°;设置好返航高度,确保返航时不会碰撞到障碍物。
6、点击右上角飞机左边更多选项,点击高级设置(地图优化限中国大陆地区使用打开);这点也是最关键的一点,这时候一定要点开中国大陆这个选项,不然飞行器的位置是偏移的。
会导致航测任务区域整体偏移,有一部分任务没有拍摄到。
7、检查任务没有问题后,点击右上角的飞机按钮,程序开始上传任务和自检,通过后就可以点击飞行了。
8、整个任务过程都是全自动的,包括起降,任务完成后,左边菜单的任务变成一个旗子的标志证明任务已经完成。
五、数据上转
当我们采集好数据后,需要上传建模,可以登录“如初三维重建”平台,免费注册个账号,就可以开始上传建模了,因为我发现这个平台很好用,建模时,只需要三个步骤,无需认为过多的调参数(不像smart3D和photoscan那么复杂),模型效果也比较好。
当模型建好后,还可以分享至朋友圈,让朋友们也可以观看自己的作品,所以飞友们可以试一下。
1、建立项目名称
2、上传照片
3、照片上传完后,点击开始建模
完成这三个步骤后,等待模型出来就可以了,即不占计算机资源,又简单方便。
我说的这些,但愿能帮你们解决到建模的难点。