角度测量原理
- 格式:doc
- 大小:213.00 KB
- 文档页数:16
角度测量技术的基本原理和应用角度测量技术是应用于工程、导航、地理测量等领域的一种重要的测量方法。
它通过测量物体或地点之间的角度来确定其位置关系,从而帮助我们更好地理解和掌握所研究领域的特性和性质。
本文将介绍角度测量技术的基本原理和一些常见的应用。
一、基本原理角度测量技术的基本原理依赖于测量物体或地点之间的角度差异。
在测量过程中,通常使用角度计量仪器(如经纬仪、陀螺仪)来测量目标物体或地点相对于参考方向的角度。
角度计量仪器的精度和测量范围是影响角度测量精度和可行性的关键因素。
例如,经纬仪常用于测量地理位置,利用水平仪和径向刻度来测量目标位置相对于地球表面和参考方向之间的角度。
而陀螺仪则是一种精密的角度计量仪器,主要用于导航和航空领域,利用陀螺仪的旋转和惯性原理来测量目标物体或地点的角度。
在角度测量中,还常常使用三角法来计算和测量角度。
三角法是一种基于三角关系的几何学方法,用于测量和计算未知角度。
通过测量已知角度和物体间的边长关系,三角法可以推导出目标角度的大小。
二、应用领域1. 工程测量角度测量技术在工程测量中有着广泛的应用。
例如,在建筑工程中,我们需要测量建筑物之间的夹角以确保建筑物的位置和方向准确无误。
另外,在制造业中,角度测量常用于测量零件和工件之间的相对位置和角度,以确保生产过程的正确性和质量。
2. 导航定位角度测量技术对于导航和定位具有重要意义。
航海、航空和航天等领域都依赖于角度测量来确定目标物体的位置和方向。
例如,罗盘是一种常用的导航仪器,利用地球的磁场来测量船只和飞行器的方向。
另外,一些现代导航系统如全球定位系统(GPS),则利用卫星信号和三角测量原理来测量目标物体的位置和方向。
3. 地理测量角度测量技术在地理测量中也有着重要的应用。
地理测量主要研究地球表面的形状、地理位置和地形特征。
通过测量目标物体或地点之间的角度,地理学家可以绘制地图、测量地形和研究地球的变化。
例如,地球测量学使用角度测量技术来测量地球的大小、形状和旋转轴的倾斜度。
角度测量仪原理
角度测量仪原理是利用旋转传感器测量物体的旋转角度。
旋转传感器通常由旋转装置、传感器元件和信号处理器组成。
旋转装置是一个可旋转的部件,通常是由金属或磁性材料制成。
它安装在要测量角度的物体上,并随着物体的旋转而旋转。
传感器元件通常是一种能够感应并测量旋转运动的物理量的装置。
根据不同的原理,常见的传感器元件有磁性传感器、电容传感器和光学传感器等。
磁性传感器通过测量磁场的变化来确定旋转角度,电容传感器则利用电容的变化来测量旋转角度,光学传感器则利用光学原理来测量旋转角度。
信号处理器是对传感器测量到的信号进行处理和转换的装置。
它能够将传感器测量到的物理量转换为电信号,并进行放大、滤波、数字化等处理,最终输出角度测量结果。
在测量过程中,旋转装置随着物体的旋转而发生旋转,传感器元件感应到旋转装置的运动,并将其转化为相应的电信号。
信号处理器对电信号进行处理后,提取出物体的旋转角度,并以数字形式输出。
通过这种原理,角度测量仪可以准确地测量物体的旋转角度。
它广泛应用于工业自动化、机械加工、航空航天等领域,为各种旋转运动的测量和控制提供了重要的技术支持。
角度测量仪的原理
角度测量仪的原理是利用光线的反射和折射的性质来测量角度。
测量角度的过程中,首先通过一束光线照射到一个镜面上,光线会根据入射角和反射定律被反射回来。
反射光线经过透镜系统集束后,通过物镜出射形成一束平行光射向目镜。
在目镜中,光线会再次发生折射,折射光线经过目镜中的光栅将光线分散成不同波长的光。
光谱被通过眼睛观测到后,可以根据不同颜色的光在光栅上的位置来判断角度大小。
测量角度的原理在于当被测角度增大时,反射光和折射光所表现出的位置差异也将增大。
通过比较不同颜色光谱的位置,可以得出角度的大小。
具体地说,当角度较小时,通过观察到的光谱位置差异很小;而当角度增大时,光谱位置差异也呈现出明显的增加。
角度测量仪的原理基于这个规律,通过测量光谱位置的变化来推算出相应的角度大小。
这需要精确的光学元件和合适的光源,以确保得到准确的测量结果。
同时,在实际应用中,还需要考虑其他因素的影响,如误差校正和环境因素等。
总结来说,角度测量仪的原理基于光线的反射和折射,通过测量光谱位置的变化来确定角度大小。

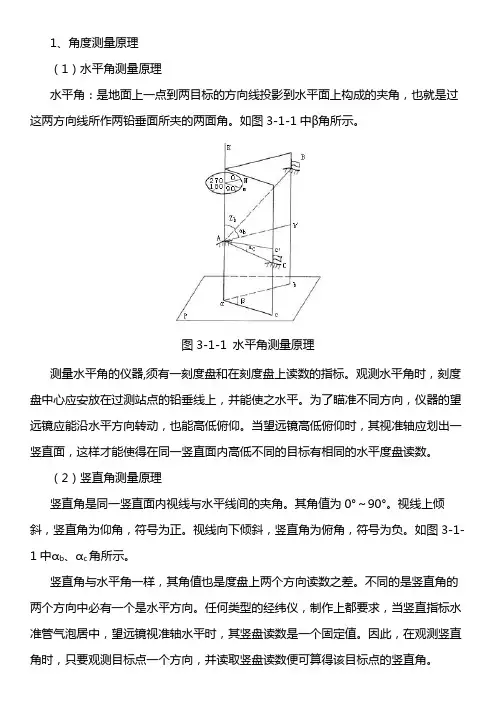
1、角度测量原理(1)水平角测量原理水平角:是地面上一点到两目标的方向线投影到水平面上构成的夹角,也就是过这两方向线所作两铅垂面所夹的两面角。
如图3-1-1中β角所示。
图3-1-1 水平角测量原理测量水平角的仪器,须有一刻度盘和在刻度盘上读数的指标。
观测水平角时,刻度盘中心应安放在过测站点的铅垂线上,并能使之水平。
为了瞄准不同方向,仪器的望远镜应能沿水平方向转动,也能高低俯仰。
当望远镜高低俯仰时,其视准轴应划出一竖直面,这样才能使得在同一竖直面内高低不同的目标有相同的水平度盘读数。
(2)竖直角测量原理竖直角是同一竖直面内视线与水平线间的夹角。
其角值为0°~90°。
视线上倾斜,竖直角为仰角,符号为正。
视线向下倾斜,竖直角为俯角,符号为负。
如图3-1-1中αb、αc角所示。
竖直角与水平角一样,其角值也是度盘上两个方向读数之差。
不同的是竖直角的两个方向中必有一个是水平方向。
任何类型的经纬仪,制作上都要求,当竖直指标水准管气泡居中,望远镜视准轴水平时,其竖盘读数是一个固定值。
因此,在观测竖直角时,只要观测目标点一个方向,并读取竖盘读数便可算得该目标点的竖直角。
2、光学经纬仪光学经纬仪按精度分为:DJ07、DJ1、DJ2、DJ6、DJ15等五级。
D表示“大地测量”,J表示“经纬仪”,07、1、2、6和15分别表示该仪器一个测回方向观测中误差的秒值。
世界上的第一台光学经纬仪是瑞士Wild生产的,目前Leica(原Wild厂)生产的经纬仪按其精度划分的型号为:T4、T3、T2、T1、T16。
以秒为单位的一测回方向观测中误差分别为±0.5″、±1″、±2″、±6″、±16″。
工程中常用的光学经纬仪为DJ2和DJ6两种。
(1)DJ6级光学经纬仪构造及读数方法1)DJ6级光学经纬仪构造DJ6级光学经纬仪构造主要由照准部、水平度盘和基座三部分构成。
测角度的传感器原理
测角度的传感器原理通常基于三种主要技术:光学、电磁和惯性。
1. 光学原理:光学传感器利用光的折射、反射或散射来测量物体的角度。
例如,旋转编码器使用光栅或编码圆盘上的光电二极管阵列来检测光栅条纹的移动,从而测量物体的旋转角度。
2. 电磁原理:电磁传感器利用感应原理来测量物体的角度。
例如,霍尔效应传感器通过测量磁场的变化来检测物体的角度变化。
另一个常见的电磁传感器是旋转变压器,它通过变换绕组之间的电感变化来测量物体的角度。
3. 惯性原理:惯性传感器利用物体的惯性力来测量其角度变化。
最常见的惯性传感器是陀螺仪,它通过检测物体的旋转速度来测量角度的变化。
陀螺仪通常基于旋转质量的原理,其中内部的旋转质量保持不变,而测量发生变化的角速度。
这些传感器原理可以独立或结合使用,以实现更准确和可靠的角度测量。
角度测量原理角度测量是指利用测量仪器或设备对物体或空间中的角度进行准确测量的原理和方法。
角度测量在工程、地质、建筑、航空航天等领域具有重要的应用价值,是实现精密测量和控制的基础。
本文将从角度测量的原理、常用的角度测量仪器和方法以及角度测量的应用等方面进行介绍。
一、角度测量的原理。
角度测量的原理主要是利用三角法和测量仪器进行测量。
在实际测量中,常用的角度测量原理包括光学测量原理、电子测量原理和机械测量原理。
光学测量原理是利用光学仪器如经纬仪、全站仪等测量角度,通过望远镜观测目标物体,利用光学原理测量出目标物体与测量仪器之间的角度。
电子测量原理是利用电子仪器如电子经纬仪、全站仪等进行角度测量,通过电子传感器和测量系统测量目标物体的角度。
机械测量原理是利用机械仪器如转台、测角尺等进行角度测量,通过机械传动和指示装置测量目标物体的角度。
二、常用的角度测量仪器和方法。
1. 全站仪,全站仪是一种集合了测角仪、测距仪和高程仪等功能于一体的测量仪器,具有测量精度高、操作简便、数据处理快速等优点,广泛应用于工程测量和地质勘探等领域。
2. 经纬仪,经纬仪是一种利用望远镜和转台进行角度测量的光学仪器,适用于野外地形测量和导向测量等工作。
3. 电子经纬仪,电子经纬仪是一种利用电子传感器和显示屏进行角度测量的电子仪器,具有测量精度高、数据记录方便等特点,广泛应用于建筑施工和航空航天等领域。
角度测量的方法包括直接测量法、间接测量法和综合测量法。
直接测量法是直接利用测量仪器对目标物体的角度进行测量;间接测量法是通过测量目标物体的其他参数如长度、高度等,间接推算出角度;综合测量法是将多种测量方法结合使用,提高测量的精度和可靠性。
三、角度测量的应用。
角度测量在工程测量、地质勘探、建筑施工、航空航天等领域具有广泛的应用。
在工程测量中,角度测量常用于测量建筑物的方位角、线路的走向角、地形的坡度角等;在地质勘探中,角度测量常用于测量地层的倾角、断层的走向等;在建筑施工中,角度测量常用于施工方向的控制、结构的布置等;在航空航天中,角度测量常用于飞行器的导航、姿态控制等。
角度测量原理及方法资料角度测量是测量物体之间或物体内部的角度大小的技术方法。
角度测量在许多领域中都有应用,如工程、建筑、地理测量、天文学、航空航天等。
本文将介绍角度测量的原理和方法,并给出一些常用的角度测量工具和技术。
一、角度测量的原理角度测量的原理基于几何学中的角度定义和角度大小的计算公式。
根据几何学的定义,角度是由两个射线或线段围成的空间中的两个点。
角度的大小可以用度、弧度或百分度来表示。
度是最常用的角度单位。
一个圆的一周共分为360度,每度又可分为60分,每分可细分为60秒。
因此,度可表示为度、分、秒的形式。
弧度是另一种常用的角度单位。
弧度是以一个半径等于一个圆心角所对应的弧长作为单位。
一个圆的一周的弧长等于2π倍半径,因此一个圆的一周等于2π弧度。
百分度是一种介于度和弧度之间的单位。
一个圆的一周等于400百分度,每百分度又可分为100分。
在实际测量中,常用的角度测量方法包括直接测量法、比较测量法和间接测量法。
二、角度测量的方法1.直接测量法直接测量法是通过角度测量仪器直接测量角度大小。
常见的直接测量仪器有经纬仪、电子经纬仪和全站仪等。
经纬仪是一种用来测量水平和垂直方向角度的仪器。
使用经纬仪时,需要调整仪器的水平和垂直仪器,使其指针与目标物体保持水平或垂直,然后读取指针上的角度刻度来得到角度大小。
电子经纬仪是一种基于电子技术的角度测量仪器。
它通过激光射线和电子传感器测量角度大小,并显示在仪器的数码显示屏上。
全站仪是一种多功能的测量仪器,可以同时进行距离、角度和高度的测量。
使用全站仪时,需要在目标物体上放置一个反射棱镜,仪器通过发送和接收激光射线的方式测量角度大小。
2.比较测量法比较测量法是通过将要测量的角度与已知角度进行比较,从而得到未知角度的测量方法。
常用的比较测量方法有光学比较测量法和机械比较测量法。
光学比较测量法是利用光束的干涉或衍射原理进行角度测量的方法。
这种方法常用于高精度的角度测量,如光学仪器的制造中。
角度测量原理的应用1. 引言角度测量是在许多领域中都必不可少的一项技术。
从航空航天到建筑工程,从生物医学到机械制造,角度测量都扮演着重要的角色。
本文将介绍角度测量的原理,并探讨一些角度测量在实际应用中的具体案例。
2. 角度测量原理角度测量是通过测量物体之间的角度差来计算角度的。
下面是几种常用的角度测量原理:2.1 光学测角原理光学测角原理是利用光线的反射和折射来测量角度的一种方法。
常见的光学测角设备包括经纬仪、光学水平仪等。
通过测量光线经过物体的角度变化,可以计算出物体之间的角度差。
2.2 惯性导航原理惯性导航是一种利用陀螺仪和加速度计等惯性元件来测量物体角度的方法。
通过测量物体的角加速度和角速度,可以计算出物体的角度变化。
惯性导航在航空航天领域中有广泛的应用,如飞行器的导航和姿态控制等。
2.3 磁导测角原理磁导测角原理是利用物体在磁场中的角度变化来测量角度的一种方法。
常见的磁导测角设备包括磁罗盘和磁导航仪等。
通过测量物体在磁场中的磁力方向变化,可以计算出物体之间的角度差。
3. 角度测量的应用案例角度测量在许多领域中都有广泛的应用。
下面将介绍几个角度测量在实际应用中的案例:3.1 建筑工程在建筑工程中,角度测量用于测量建筑物之间的角度差,以确保建筑物的准确对齐。
例如,在斜屋顶的建筑中,需要测量屋顶的倾斜角度,以便正确安装屋顶材料。
3.2 航空航天在航空航天领域中,角度测量用于飞行器的导航和姿态控制。
例如,在飞机中使用的无人驾驶飞行系统需要准确测量飞机的姿态角度,以确保飞机的平稳飞行和正确的航向。
3.3 机械制造在机械制造领域中,角度测量用于测量机械零件之间的角度差,以确保机械装配的准确性。
例如,在车辆制造中,需要测量车轮之间的夹角,以确保车辆的正常行驶和转弯。
3.4 生物医学在生物医学领域中,角度测量用于测量人体关节的活动范围和角度变化。
例如,在关节手术中,医生需要测量关节的角度,以确定手术操作的准确性。
角度测量原理内容:理解水平角、竖直角测量的基本原理;掌握光学经纬仪的基本构造、操作与读数方法;水平角测量的测回法和方向观测法;掌握竖盘的基本构造及竖直角的观测、计算方法;掌握光学经纬仪的检验与校正方法;了解水平角测量误差来源及其减弱措施及电子经纬仪的测角原理及操作方法。
重点:光学经纬仪的使用方法;水平角测回法测量方法;竖直角测量方法;难点:光学经纬仪的检验与校正。
§ 3.1 角度测量原理角度测量(angular observation) 包括水平角(horizontal angle) 测量和竖直角(vertical angle) 测量。
一、水平角定义从一点出发的两空间直线在水平面上投影的夹角即二面角,称为水平角。
其范围:顺时针0°~360°。
二、竖直角定义在同一竖直面内,目标视线与水平线的夹角,称为竖直角。
其范围在0°~±90°之间。
如图当视线位于水平线之上,竖直角为正,称为仰角;反之当视线位于水平线之下,竖直角为负,称为俯角。
§ 3.2 光学经纬仪(optical theodolite )经纬仪是测量角度的仪器。
按其精度分,有DJ6 、DJ2 两种。
表示一测回方向观测中误差分别为6"、2"。
一、DJ6 光学经纬仪的构造DJ6 光学经纬仪图1、照准部(alidade)2、水平度盘(horizontal circle)3、基座(tribrach)二、J6的读数方法1、J6 经纬仪采用“分微尺测微器读数法”,分微尺的分划值为1ˊ,估读到获0.1ˊ( 即:6") 。
如图,水平度盘读数为:73°04ˊ24"。
2、“ H ”——水平度盘读数,“ V ”——竖直度盘读数。
三、J2 光学经纬仪的构造如图与J6 相比,增加了:1、测微轮——用于读数时,对径分划线影像符合。
2、换像手轮——用于水平读数和竖直读数间的互换。
3、竖直读盘反光镜——竖直读数时反光。
四、J2 的读数方法一般采用对径重合读数法——转动测微轮,使上下分划线精确重合后读数。
五、经纬仪的安置内容及要求:对中(centering) ±小于3mm整平(leveling) 小于1 格1、垂球对中整平法步骤(1)移动或伸缩三脚架(粗略对中)(2)脚架头上移动仪器(精确对中)(3)旋转脚螺旋使水准管气泡居中(整平)(4)反复(2)、(3)两步。
2、光学对中整平法步骤(1)大致水平大致对中眼睛看着对中器,拖动三脚架 2 个脚,使仪器大致对中,并保持“ 架头” 大致水平。
(2)伸缩脚架粗平根据气泡位置,伸缩三脚架 2 个脚,使圆水准气泡居中。
(3)旋转三个脚螺旋精平按“左手大拇指法则”旋转三个脚螺旋,使水准管气泡居中。
1)转动仪器,使水准管与1 、2 脚螺旋连线平行。
2)根据气泡位置运用法则,对向旋转 1 、2 脚螺旋。
3)转动仪器90°,运用法则,旋转 3 脚螺旋。
(4)架头上移动仪器,精确对中(5)脚螺旋精平。
(6)反复(4)、(5)两步。
旋转三个脚螺旋进行精平的示意图§ 3.3 水平角测量(horizontal angle observation)水平角的测量方法常用的有测回法(method of observation set) 、方向观测法(method of direction observation) 。
一、经纬仪(theodolite,transit) 的安置内容及要求:对中(centering) 小于± 3mm整平(leveling) 小于1 格1、垂球(plumb bob) 法2、光学对中器(optical plummet )法二、瞄准方法步骤:粗瞄—制动—调焦—微动精瞄。
两个基本概念:盘左(正镜)、盘右(倒镜)三、测回法1、适用:两个方向的单角(∠AOB )。
2、观测步骤:(1)盘左瞄准左边A ,配度盘至0°0X ′,读取a1 。
(2)顺时针旋转瞄准右边B ,读取b1 。
则上半测回角值:β1 =b1 -a1 。
(3)倒镜成盘右,瞄准右边 B ,读取b2 。
(4)逆时针旋转瞄准左边A ,读取a2 。
则下半测回角值:β2 =b2 -a2 (5)计算角值。
若β1 - β2 ≤± 40" (图根级)则有:β = (β1 + β2)/2 3、记录格式测站盘位目标水平度盘读数° ′ ″半测回角值° ′ ″一测回角值° ′ ″备注O左A00 01 1270 12 3670 12 33B70 13 48右A180 01 2470 12 30B250 13 54若要观测n 个测回,为减少度盘分划误差,各测回间应按180°/n 的差值来配置水平度盘。
测回法测水平角方法,可小结如下:四、方向观测法1、适用:在一个测站上需要观测两个以上方向。
2、观测步骤:(如下图,有四个观测方向)(1)上半测回选择一明显目标A 作为起始方向(零方向),用盘左瞄准 A ,配置度盘,顺时针依次观测 A 、B 、C 、D 、A 。
(2)下半测回倒镜成盘右,逆时针依次观测 A 、 D 、 C 、 B 、A 。
同理各测回间按180°/n 的差值,来配置水平度盘。
3、记录、计算(1)2C 值(两倍照准误差):2C = 盘左读数-(盘右读数± 180°)。
一测回内2C 互差,对J2 ≤18"。
对J6 不作要求。
(2)半测回归零差:对J2 ≤ 12";对J6 ≤18" 。
(3)各方向盘左、盘右读数的平均值:平均值=[ 盘左读数+(盘右读数± 180°)]/2注意:零方向观测两次,应将平均值再取平均。
(4)归零方向值:将各方向平均值分别减去零方向平均值,即得各方向归零方向值。
(5)各测回归零方向值的平均值:同一方向值各测回间互差,对J2 ≤12" ;对J 6 ≤ 24"。
方向观测法可小结如下:§ 3.4 竖直角测量一、竖直度盘(vertical circle ) 的构造1、竖直度盘的构造包括:(1) 竖盘(vertical circle)(2) 竖盘指标水准管(vertical index bubble tube)(3) 竖盘指标水准管微动螺旋。
其中,竖盘指标水准管和竖盘指标水准管微动螺旋,可采用竖盘指标自动归零补偿器(vertical index compensator) 来替代。
2、指标线固定不动,而整个竖盘随望远镜一起转动。
3、竖盘的注记形式有顺时针与逆时针两种。
二、竖直角(vertical angle) 的计算公式1、顺时针注记形式故有:α左=90°-L ,α右=R-270°一测回竖直角α = (α左+ α右)/22、逆时针注记形式有:α左=L-90°,α右=270°-R一测回的竖直角为:α =(α左+ α右)/2三、竖盘指标差(index error of vertical circle)1、定义由于指标线偏移,当视线水平时,竖盘读数不是恰好等于90°或270°上,而是与90°或270°相差一个x 角,称为竖盘指标差。
当偏移方向与竖盘注记增加方向一致时,x 为正,反之为负。
2、计算公式(1)指标差:x= (L+R-360°)/2对于顺时针注记的:正确的竖直角α=(90°+ x )-L= α左+ xα=R-(270°+x )= α右- x(2)结论:取盘左盘右的平均值,可消除指标差的影响。
四、竖直角的观测及记录(格式见表)一般规范规定,指标差变动范围,J6 ≤25" 、J2 ≤15" 。
测站目标盘位竖盘读数° ′ ″半测回竖直角° ′ ″指标差(" )一个测回竖直角° ′ ″备注OM左76 45 1213 14 48-613 14 42竖直度盘是顺时针注记的。
右283 14 3613 14 36N左122 03 36-32 03 3612-32 03 24右237 56 48-32 03 12§ 3.5 光学经纬仪的检验与校正如图所示,经纬仪的主要轴线:1、竖轴VV(vertical axis)2、水准管轴LL(bubble tube axis)3、横轴HH(horizontal axis)4、视准轴CC(collimation axis)5、圆水准器轴L'L'(circle bubble axis)一、经纬仪轴线应满足的条件1、VV ⊥LL ——照准部水准管轴的检校。
2、HH ⊥十字丝竖丝——十字丝竖丝的检校3、HH ⊥CC ——视准轴的检校4、HH ⊥VV ——横轴的检校5、竖盘指标差应为零——指标差的检校6、光学垂线与VV 重合——光学对中器的检校7、圆水准轴L'L' ∥VV ——圆水准器的检验与校正( 次要)二、经纬仪的检验与校正1、照准部水准管轴的检校(1)检验:用任意两脚螺旋使水准管气泡居中,然后将照准部旋转180°,若气泡偏离 1 格,则需校正。
(2)校正:用脚螺旋使气泡向中央移动一半后,再拨动水准管校正螺丝,使气泡居中。
此时若圆水准器气泡不居中,则拨动圆水准器校正螺丝。
2、十字丝竖丝的检校(1)检验:用十字丝交点对准一目标点,再转动望远镜微动螺旋,看目标点是否始终在竖丝上移动。
(2)校正:微松十字丝的四个压环螺丝,转动十字丝环,使目标点始终在竖丝上移动。
3、视准轴的检校(1)检验:如图,在平坦地面上选择一直线AB ,约60m ~100m ,在AB 中点O 架仪,并在 B 点垂直横置一小尺。
盘左瞄准 A ,倒镜在 B 点小尺上读取B1 ;再用盘右瞄准 A ,倒镜在 B 点小尺上读取B2 。
J6 :2c >60" ;J2 :2c >30" 时,则需校正。
(2)校正:拨动十字丝左右两个校正螺丝,使十字丝交点由B2 点移至BB2 中点B3 。
4、横轴的检验与校正(1)检验:如图,在20—30m 处的墙上选一仰角大于30°的目标点P ,先用盘左瞄准P 点,放平望远镜,在墙上定出P1 点;再用盘右瞄准P 点,放平望远镜,在墙上定出P2 点。
对J6 经纬仪:i>20"时,则需校正。
(2)校正:用十字丝交点瞄准P1 P2 的中点M ,抬高望远镜,并打开横轴一端的护盖,调整支承横轴的偏心轴环,抬高或降低横轴一端,直至交点瞄准P 点。