一种运动目标检测与跟踪快速算法的研究
- 格式:pdf
- 大小:688.07 KB
- 文档页数:2
移动机械手运动目标检测与跟踪技术研究一、内容概要随着科技的不断发展,移动机械手在工业生产中的应用越来越广泛。
然而由于环境复杂、目标多变以及机械手运动的特殊性,给移动机械手的运动目标检测与跟踪技术带来了很大的挑战。
为了提高移动机械手的自主性和智能化水平,本文对移动机械手运动目标检测与跟踪技术进行了深入研究。
本文首先介绍了移动机械手的基本概念和工作原理,分析了其在工业生产中的重要性和应用前景。
接着针对移动机械手运动目标检测与跟踪技术的现状,提出了一种基于深度学习的目标检测与跟踪方法。
该方法结合了传统目标检测算法和深度学习技术的优势,能够有效地识别和跟踪移动机械手运动过程中的各种目标。
为了验证所提出方法的有效性,本文通过实验对比分析了不同方法在移动机械手运动目标检测与跟踪任务上的表现。
实验结果表明,所提出的基于深度学习的目标检测与跟踪方法具有较高的检测率和跟踪精度,能够满足移动机械手在复杂环境下的实时监控需求。
1. 研究背景和意义随着科技的不断发展,移动机械手在工业生产、物流配送等领域的应用越来越广泛。
然而由于移动机械手的特殊性,如高度灵活、操作空间有限等,使得其在实际应用过程中面临着诸多挑战,如运动目标检测与跟踪技术的研究尤为重要。
本文旨在通过对移动机械手运动目标检测与跟踪技术研究,提高移动机械手的自动化水平,降低人工干预的需求,从而提高生产效率和质量。
近年来随着人工智能技术的快速发展,机器人技术在各个领域取得了显著的成果。
特别是在工业生产、物流配送等领域,机器人技术的应用已经逐渐成为一种趋势。
然而由于移动机械手的特殊性,如高度灵活、操作空间有限等,使得其在实际应用过程中面临着诸多挑战,如运动目标检测与跟踪技术的研究尤为重要。
本文通过对移动机械手运动目标检测与跟踪技术研究,具有以下几个方面的研究意义:提高移动机械手的自动化水平。
通过研究运动目标检测与跟踪技术,可以实现对移动机械手周围环境的实时感知和精确控制,从而提高移动机械手的自动化水平。
基于计算机视觉的运动目标检测与追踪研究摘要:随着计算机视觉和人工智能的快速发展,基于计算机视觉的运动目标检测和追踪成为了当前研究的热点。
本文将介绍运动目标检测和追踪的概念,并详细探讨了一些常见的方法和技术,如基于深度学习的目标检测算法和多目标追踪。
最后,本文还对未来的研究方向进行了展望。
1. 引言随着计算机视觉和人工智能技术的进步,运动目标检测和追踪在许多领域中都具有重要应用。
例如,在视频监控和智能交通系统中,准确地检测和追踪运动目标可以提供更安全和高效的服务。
因此,研究如何利用计算机视觉的方法来实现运动目标检测和追踪变得尤为重要。
2. 运动目标检测运动目标检测是指通过计算机视觉技术识别图像或视频中的运动目标。
传统的方法主要基于图像处理和特征提取技术,如背景减除、边缘检测和目标轮廓提取。
然而,这些方法往往对光照变化和背景复杂的场景效果不佳。
近年来,基于深度学习的目标检测算法如Faster R-CNN、YOLO和SSD等取得了显著的进展。
这些算法能够自动学习目标的特征,从而在复杂场景下表现出更好的性能。
3. 运动目标追踪运动目标追踪是指跟踪运动目标在连续帧中的位置和运动状态。
与运动目标检测相比,追踪更具挑战性,因为目标在不同帧之间可能会发生形变、遮挡或运动模式的变化。
针对这些问题,研究者提出了各种追踪算法,如基于相关滤波器的方法、粒子滤波和深度学习方法等。
其中,多目标追踪是一种更复杂的问题,需要同时追踪多个运动目标。
针对多目标追踪,常见的方法有多目标跟踪器的设计和融合方法等。
4. 挑战和解决方案运动目标检测和追踪中存在一些挑战,例如复杂背景、目标形变、光照变化和目标遮挡等。
为了解决这些问题,研究者提出了一系列解决方案。
例如,对于复杂背景,可以采用自适应背景建模和深度学习方法来提高检测和追踪的准确性。
对于目标形变和光照变化,可以使用形变估计和颜色模型来进行调整。
另外,目标遮挡问题可以使用多目标追踪和深度学习等方法来解决。
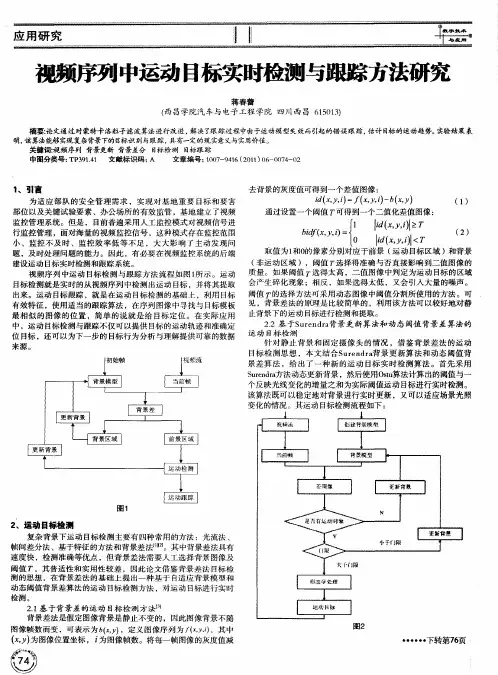
视频图像中运动目标检测与跟踪方法研究视频图像中运动目标检测与跟踪方法研究目前,随着无人驾驶、智能监控系统、机器人等领域的发展,视频图像中运动目标检测与跟踪技术显得十分重要。
运动目标检测与跟踪是指在视频图像中,通过计算机视觉技术准确地识别和跟踪移动的目标物体。
本文将深入探讨视频图像中运动目标检测与跟踪的方法及其研究现状。
一、运动目标检测方法研究1. 光流法:光流法是一种基于像素的运动目标检测方法,通过计算相邻帧之间像素的位移,来估计目标物体的运动方向和速度。
该方法基于前提假设,即视频中的相邻帧之间的像素强度不会发生变化。
然而,在实际应用中,由于光照变化、遮挡等因素,光流法往往无法准确估计目标物体的运动。
2. 背景建模法:背景建模法是一种基于像素的运动目标检测方法,通过对视频图像中的背景进行建模,将与背景差异较大的像素判定为运动目标。
背景建模法可以通过统计学方法或者机器学习方法来建模背景,然后利用背景模型与当前帧进行比较,以得到运动目标。
然而,背景建模法对于光照变化、摄像机抖动等因素比较敏感,导致检测结果不够准确。
3. 全局运动目标检测法:全局运动目标检测法是一种基于区域的运动目标检测方法,通过将视频图像划分为多个小区域,对每个区域进行运动分析,以判定是否存在运动目标。
该方法可以克服背景建模法的不足,具有较好的适应性和准确性。
二、运动目标跟踪方法研究1. 卡尔曼滤波器:卡尔曼滤波器是一种常用的运动目标跟踪算法,通过对目标的状态进行估计和预测,来实现目标的跟踪。
卡尔曼滤波器通过动态模型和观测模型对目标的运动进行建模,然后通过观测数据对目标的状态进行更新。
然而,卡尔曼滤波器对于非线性问题的跟踪效果较差。
2. 粒子滤波器:粒子滤波器是一种基于蒙特卡洛采样的运动目标跟踪算法,在复杂背景和非线性目标跟踪中表现出较好的效果。
粒子滤波器通过随机采样的粒子对目标状态进行估计,并根据观测数据进行更新。
然而,粒子滤波器的计算复杂度较高,且对于目标缺失或者遮挡情况处理不佳。
《基于光流法的运动目标检测与跟踪技术》篇一一、引言随着计算机视觉技术的不断发展,运动目标检测与跟踪技术在智能监控、自动驾驶、人机交互等领域得到了广泛应用。
其中,光流法作为一种重要的运动目标检测与跟踪技术,因其能实时、准确地捕捉运动目标的轨迹和位置信息,被广泛地应用于各种实际应用场景中。
本文将介绍基于光流法的运动目标检测与跟踪技术的基本原理、方法及最新进展。
二、光流法基本原理光流法是利用图像序列中像素强度变化信息来检测运动目标的一种方法。
它通过分析图像序列中像素点的亮度变化情况,从而确定各像素点的运动矢量,即光流。
根据光流的大小和方向,可以确定图像中运动目标的轨迹和位置信息。
光流法具有计算简单、实时性较好等优点,在运动目标检测与跟踪中得到了广泛应用。
三、光流法在运动目标检测中的应用1. 背景建模与去除:通过光流法对图像序列进行背景建模,将背景与前景分离,从而实现对运动目标的检测。
该方法可以有效地去除背景噪声,提高运动目标检测的准确性。
2. 动态阈值设定:根据图像序列中像素点的光流大小和方向,设定动态阈值来区分运动目标和背景。
这种方法能够根据实际情况自动调整阈值,从而提高运动目标检测的鲁棒性。
3. 轮廓提取:利用光流矢量场对图像进行分割,提取出运动目标的轮廓信息。
这种方法可以有效地提取出运动目标的形状特征,为后续的跟踪和识别提供基础。
四、光流法在运动目标跟踪中的应用1. 特征点匹配:通过光流法计算的特征点与已知的特征点进行匹配,实现运动目标的跟踪。
该方法具有较好的鲁棒性,适用于复杂的场景和光照条件变化。
2. 基于区域的跟踪:利用光流场估计的区域内像素点的动态信息,对运动目标进行区域性跟踪。
该方法能够提高跟踪的准确性和稳定性,减少因噪声和遮挡等因素导致的跟踪失败。
3. 多线索融合:将光流法与其他传感器数据(如深度信息、声音信息等)进行多线索融合,实现多模态的跟踪方法。
这种方法能够提高跟踪的准确性和可靠性,适用于多种复杂场景。
高速运动目标的跟踪算法研究导语:随着科技的不断发展,各行各业都在不断地寻求创新和进步。
在安全监控领域,高速运动目标跟踪技术已经成为了不可或缺的一部分,因此如何研究和应用高速运动目标的跟踪算法成为了一个热门话题。
本文将从算法研究的角度探讨这个话题。
一、算法概述高速运动物体跟踪算法是指通过一系列计算机视觉和图像处理算法来对运动速度较快、变化较大的物体进行追踪和预测的技术。
主要应用于交通、安防等领域,可以对路面行驶的汽车、飞驰的摩托车、奔跑的人等高速运动目标进行实时跟踪,从而帮助安全监控人员进行快速有效的应对。
二、研究现状目前,国内外有很多关于高速运动物体跟踪算法的研究。
其中常见的算法包括以下几种:1. 匹配滤波算法:该算法利用模板匹配的方法对物体进行跟踪。
该方法虽然精确度高,但受到受干扰光照等因素的影响较大。
2. 卡尔曼滤波算法:该算法利用运动学模型来预测物体的位置和速度,从而对物体进行跟踪。
该方法适用于小尺度、低速运动物体的跟踪,但对于高速运动目标的跟踪效果并不好。
3. 光流算法:该算法基于图像亮度的变化,通过计算每个像素在两个相邻图像间的位置关系来实现物体跟踪。
该方法精确度较高,但对高速移动的物体跟踪效果较差。
通过对以上算法的研究,我们发现目前尚没有一种完全适用于高速运动目标跟踪的算法。
因此,在这个领域的研究中,需要不断地探究和发现更加适用于高速运动目标的跟踪算法。
三、创新思路1. 基于深度学习的算法:目前深度学习技术在计算机视觉领域得到了广泛的应用,通过卷积神经网络和循环神经网络等技术,可以对高速运动目标进行更为准确的跟踪和识别。
2. 基于多模态融合的算法:多模态融合是指利用多种传感器来采集目标的位置、速度、方向等信息,并将这些信息综合起来,从而提高物体跟踪的精度。
3. 基于自适应滤波的算法:自适应滤波基于物体运动模型和噪声分布模型,可以将物体运动轨迹的不确定性进行有效地估计和处理,从而提高物体跟踪的精度。
《智能监控系统中运动目标的检测与跟踪》篇一一、引言随着科技的快速发展,智能监控系统在各个领域得到了广泛应用。
其中,运动目标的检测与跟踪是智能监控系统的核心技术之一。
本文将详细探讨智能监控系统中运动目标的检测与跟踪技术,包括其基本原理、应用场景、算法实现以及面临的挑战和未来发展方向。
二、运动目标检测与跟踪的基本原理运动目标检测与跟踪是利用计算机视觉和图像处理技术,从监控视频中提取出运动目标,并对其进行连续跟踪的过程。
其基本原理包括运动目标检测、特征提取、目标匹配与跟踪等步骤。
1. 运动目标检测:通过分析视频序列中的像素变化,检测出运动目标。
常用的方法包括背景减除法、光流法、帧间差分法等。
2. 特征提取:从检测到的运动目标中提取出有用的特征信息,如形状、颜色、纹理等。
这些特征信息将用于后续的目标匹配与跟踪。
3. 目标匹配与跟踪:利用提取的特征信息,在连续的视频帧中对运动目标进行匹配与跟踪。
常用的算法包括基于滤波的方法、基于模型的方法、基于深度学习的方法等。
三、运动目标检测与跟踪的应用场景运动目标检测与跟踪技术在智能监控系统中有着广泛的应用场景。
以下是几个典型的应用场景:1. 交通监控:通过检测与跟踪道路上的车辆和行人,实现交通流量统计、违章行为识别等功能。
2. 公共安全:在公共场所安装监控系统,实时检测与跟踪可疑人员,提高安全防范能力。
3. 智能安防:通过检测与跟踪家庭或企业的出入人员,实现智能安防报警功能。
4. 体育赛事:在体育赛事中,通过检测与跟踪运动员的轨迹,为教练员提供实时数据分析,帮助制定更科学的训练计划。
四、算法实现运动目标检测与跟踪的算法实现主要包括以下几个步骤:1. 预处理:对原始视频进行去噪、增强等预处理操作,提高后续处理的准确性。
2. 运动目标检测:采用背景减除法、光流法或帧间差分法等方法,从视频中检测出运动目标。
3. 特征提取:从检测到的运动目标中提取出有用的特征信息,如形状、颜色、纹理等。
《基于OPENCV的运动目标检测与跟踪技术研究》篇一一、引言随着计算机视觉技术的飞速发展,运动目标检测与跟踪技术已经成为计算机视觉领域研究的热点。
该技术广泛应用于智能监控、交通流量管理、人机交互等众多领域。
OpenCV作为一个强大的计算机视觉库,为运动目标检测与跟踪提供了有效的工具。
本文旨在研究基于OpenCV的运动目标检测与跟踪技术,探讨其原理、方法及实际应用。
二、运动目标检测技术研究1. 背景及原理运动目标检测是计算机视觉中的一项基本任务,其目的是从视频序列中提取出运动的目标。
OpenCV提供了多种运动目标检测方法,如背景减除法、光流法、帧间差分法等。
其中,背景减除法是一种常用的方法,其原理是将当前帧与背景模型进行比较,从而检测出运动目标。
2. 关键技术与方法(1)背景建模:背景建模是运动目标检测的关键步骤。
OpenCV提供了多种背景建模方法,如单高斯模型、混合高斯模型等。
其中,混合高斯模型能够更好地适应背景的动态变化。
(2)阈值设定:设定合适的阈值是运动目标检测的重要环节。
阈值过低可能导致误检,阈值过高则可能导致漏检。
OpenCV通过统计像素值分布,自动设定阈值,从而提高检测的准确性。
3. 实验与分析本文通过实验对比了不同背景建模方法和阈值设定对运动目标检测效果的影响。
实验结果表明,混合高斯模型结合合适的阈值设定能够获得较好的检测效果。
此外,本文还对不同场景下的运动目标检测进行了实验,验证了该方法的稳定性和泛化能力。
三、运动目标跟踪技术研究1. 背景及原理运动目标跟踪是指在视频序列中,对检测到的运动目标进行持续跟踪。
OpenCV提供了多种跟踪方法,如光流法、Meanshift 算法、KCF算法等。
这些方法各有优缺点,适用于不同的场景和需求。
2. 关键技术与方法(1)特征提取:特征提取是运动目标跟踪的关键步骤。
OpenCV可以通过提取目标的颜色、形状、纹理等特征,实现稳定的目标跟踪。
此外,还可以采用深度学习等方法,提取更高级的特征,提高跟踪的准确性。
《基于光流法的运动目标检测与跟踪技术》篇一一、引言在计算机视觉和智能监控领域,运动目标检测与跟踪技术是研究热点之一。
其中,基于光流法的运动目标检测与跟踪技术因其高效、实时和准确的特性而备受关注。
本文将详细介绍基于光流法的运动目标检测与跟踪技术的原理、方法及其应用。
二、光流法的基本原理光流是一种描述图像序列中像素点强度变化的技术。
在运动场景中,光流反映了像素点在时间维度上的运动轨迹。
基于光流法的运动目标检测与跟踪技术,主要是通过计算图像序列中像素点的光流信息,进而确定运动目标的轨迹和位置。
三、光流法的计算方法光流法计算的基本思想是假设在相邻两帧图像中,像素点的运动速度是连续的。
根据这个假设,可以计算出每个像素点的速度矢量,即光流。
常用的光流计算方法包括稀疏光流法和稠密光流法。
稀疏光流法主要关注图像中的特征点,通过匹配特征点来计算光流;而稠密光流法则计算图像中每个像素点的光流信息。
四、运动目标检测与跟踪技术基于光流法的运动目标检测与跟踪技术主要包括以下步骤:首先,通过计算图像序列中每个像素点的光流信息,得到图像的运动场;然后,根据运动场的分布和特性,检测出运动目标的位置和轨迹;最后,利用一定的跟踪算法,对运动目标进行持续跟踪和轨迹预测。
五、技术应用及优势基于光流法的运动目标检测与跟踪技术在智能监控、智能交通、人机交互等领域有着广泛的应用。
其优势在于能够实时、准确地检测和跟踪运动目标,对光照变化、遮挡等复杂场景具有较强的适应性。
此外,该技术还能为后续的目标识别、行为分析等提供可靠的数据支持。
六、技术挑战与展望尽管基于光流法的运动目标检测与跟踪技术取得了显著的成果,但仍面临一些挑战。
例如,在处理高动态场景、多目标交互等复杂情况时,算法的实时性和准确性有待提高。
未来,该领域的研究将围绕提高算法的鲁棒性、降低计算复杂度、融合多源信息等方面展开。
同时,随着深度学习、机器学习等技术的发展,基于光流法的运动目标检测与跟踪技术将更加智能化和自动化。
邮局订阅号:82-946120元/年技术创新软件时空《PLC 技术应用200例》您的论文得到两院院士关注基于光流的运动目标检测跟踪快速算法The Fast Algorithm Based on Optical Flow for Tracking Moving Targets(装甲兵工程学院)关兴来谢晓竹GUAN Xing-lai XIE Xiao-zhu摘要:采用光流算法对运动目标进行识别跟踪,其优点是能够适应复杂的背景条件,并且能保证目标分割的完整性,但现有的按照光流矢量对目标进行跟踪的算法有明显的局限性:运算量过大,并且不适用与运动特征复杂的目标。
对现有算法进行改进,采用均值平滑算法和基于光流绝对值的区域分割算法,可以有效解决这两个问题。
关键词:光流;运动目标;图像分割中图分类号:TP391.4文献标识码:AAbstract:Using optical flow algorithm for identification and tracking moving targets,the advantage is the ability to adapt to the com -plex background conditions,and can ensure the integrity of the target partition,but the existing target tracking algorithm based on op -tical flow vector has obvious limitations:excessive operation,and does not apply and movement characteristics of complex targets.Im -provements to existing algorithms,using the pyramid optical flow-based smoothing algorithm and the absolute value of the region seg -mentation algorithm can effectively solve these two problems.Key word:Optical flow;Kinetic target;Image segmentation 文章编号:1008-0570(2012)10-0421-03图像序列中的运动目标检测跟踪是指在图像序列中将前景运动区域从背景中提取出来。
运动目标检测与跟踪算法的研究进展0 引言人类感知的环境信息大多是通过视觉获得的,而在接受到的所有视觉信息中,人们又往往对动态信息更感兴趣。
随着多媒体技术的发展,人们正在接触越来越多的视频信息。
一方面,要获得较高压缩比来存储这些信息,另一方面,需要对感兴趣的区域或对象进行操作[1]。
因此对视频图像中运动目标的提取、分类识别和跟踪,已成为对运动目标的行为进行理解和描述视频图像中动态信息的主要内容。
运动目标的检测与跟踪在技术上融合了计算机视觉、视频图像处理、模式识别和自动控制等相关领域的知识[2]。
运动目标的检测与跟踪是视频技术的一个重要研究方向,其应用十分广泛。
在交通流量的监测、安全监控、军事制导、视觉导航,以及视频编码中都有涉及。
目前,运动目标的检测与跟踪已经取得了很多成果,并且不断有新技术、新算法涌现。
但是,在实际环境中,由于自然环境的复杂(光照、气候的变化等),目标的高机动性,干扰了目标检测与跟踪,造成检测不准确且跟踪效率不高。
因此,研究改进运动目标检测与跟踪算法有很现实的意义和应用价值。
1 运动目标检测常用算法运动目标检测就是从视频图像中将变化的区域从背景中提取出来,此类算法依照目标与摄像机之间的关系可以分为静态背景下运动检测和动态背景下运动检测。
静态背景下只有被监视目标在摄像机的视场内运动;而动态背景下摄像机也发生了运动,这个过程就产生了目标与背景之间复杂的相对运动,造成动态背景下的运动检测和跟踪难度很大。
目前对于动态背景下运动检测和跟踪的研究较少,因此本文暂不涉及运动背景下的运动目标检测与跟踪。
在静态背景下,运动目标检测主要算法有三种:帧间差分法、背景差分法和光流法。
下面分别对这三种算法进行分析。
1.1 帧间差分法帧间差分法[3]的基本原理就是相邻帧的图像对应像素点的灰度值相减,通过差分图像进行二值化处理以确定运动目标。
帧间差分法的主要优点是:算法实现简单,程序设计复杂度低;不存在背景的获取、更新和存储的问题;对场景中光线的变化不太敏感,实时性好。
运动场景中的目标检测与跟踪算法的研究随着计算机视觉技术的快速发展,目标检测与跟踪算法在运动场景中的应用越来越广泛。
本文将介绍运动场景中目标检测与跟踪算法的研究现状和发展趋势。
一、目标检测算法目标检测算法用于从图像或视频中定位和分类物体。
在运动场景中,目标检测算法需要处理物体的运动模糊、几何变换和遮挡等问题。
1.传统算法传统的目标检测算法主要包括基于模板匹配、基于特征提取的方法和基于机器学习的方法。
模板匹配方法通过比较图像中的模板和待检测物体的相似性来完成目标检测。
由于其对光照、姿态和遮挡等因素极其敏感,因此在运动场景中的应用受到限制。
特征提取方法通过提取物体在图像中的一些特定特征,如颜色、纹理、边缘、角点等,来实现物体的检测。
最为广泛应用的是基于Haar特征和HOG(方向梯度直方图)特征的方法。
这些方法可以在不同的光照、姿态和遮挡等情况下有相对稳定的检测效果,但是其缺点是检测速度较慢且对于复杂背景和噪声等因素会有较大影响。
机器学习的目标检测方法主要包括基于支持向量机(SVM)和AdaBoost算法的方法。
这些方法可以更好地解决物体遮挡和局部遮挡的问题,但是需要较大的训练数据和特征工程的支持。
2.深度学习算法近年来,深度学习算法在目标检测领域取得了显著的进展,尤其是基于卷积神经网络(CNN)的方法。
本文介绍以下几种深度学习算法在运动场景中的应用。
基于快速基础模型(Faster R-CNN)的目标检测算法可以同时检测多个物体并具有较高的检测精度和速度。
在运动场景中,物体的运动速度较快,因此该算法需要加入运动模型和目标跟踪等额外信息来提高检测精度。
基于单阶段检测模型(YOLO)的目标检测算法可以同时进行目标检测和跟踪,并具有较快的处理速度。
这种算法在处理大量目标时效果尤其明显。
二、目标跟踪算法目标跟踪算法是在一系列连续帧中跟踪物体的位置和运动状态的过程。
由于运动场景中物体的姿态、运动和遮挡等因素的不确定性,目标跟踪算法的研究领域也显得尤为重要。
视频监控系统中的移动目标检测与跟踪算法研究近年来,随着科技的不断进步和人们对安全意识的提高,视频监控系统在各行业广泛应用。
而在视频监控系统中,移动目标检测与跟踪算法的研究成为了一个重要的课题。
本文将对视频监控系统中的移动目标检测与跟踪算法进行深入研究,并对其技术原理和应用进行详细讨论。
一、移动目标检测算法的原理及应用1. 移动目标检测算法原理:移动目标检测算法主要通过对视频中连续的帧图像进行处理,从中提取出运动目标。
常见的移动目标检测算法包括帧间差分法、背景建模法和光流法等。
帧间差分法通过比较相邻帧之间的差异来判断目标是否发生运动;背景建模法则通过对背景进行建模,将与背景明显不同的部分识别为目标;光流法则通过分析连续帧图像中像素之间的光流差异,来判断目标的运动状态。
2. 移动目标检测算法应用:移动目标检测在视频监控系统中有着广泛的应用,例如交通监控、智能安防、行为分析等。
在交通监控领域,移动目标检测算法可以用于车辆违章检测、交通事故监测等;在智能安防领域,移动目标检测算法可以用于入侵检测、人脸识别等;在行为分析领域,移动目标检测算法可以用于行人计数、异常行为检测等。
二、移动目标跟踪算法的原理及应用1. 移动目标跟踪算法原理:移动目标跟踪算法主要通过对连续帧图像中已检测到的目标进行跟踪,从而实现对目标的实时追踪。
常见的移动目标跟踪算法包括卡尔曼滤波器、粒子滤波器和相关滤波器等。
卡尔曼滤波器通过对目标位置的预测和观测进行融合来估计目标的实际位置;粒子滤波器则通过一系列的随机粒子来估计目标的位置;相关滤波器则通过计算目标模板与候选目标区域的相似性来跟踪目标。
2. 移动目标跟踪算法应用:移动目标跟踪算法在视频监控系统中有着广泛的应用,例如目标追踪、行为分析等。
在目标追踪领域,移动目标跟踪算法可以用于单目标跟踪、多目标跟踪等;在行为分析领域,移动目标跟踪算法可以用于目标运动轨迹分析、目标速度估计等。
通过移动目标跟踪算法,可以对目标的运动行为进行监测与分析,提供有效的安全保障和行为研究数据。