唐朔飞《计算机组成原理》课后习题详解(控制单元的设计)【圣才出品】
- 格式:pdf
- 大小:1.15 MB
- 文档页数:27
计算机组成原理第二版课后习题答案全唐朔飞计算机组成原理第二版课后习题答案计算机组成原理是计算机科学与技术专业的一门重要课程,它主要讲述了计算机系统的基本组成和工作原理。
理解和掌握计算机组成原理对学习和实践计算机领域都至关重要。
为了帮助读者更好地巩固和应用所学知识,本文将提供《计算机组成原理第二版》课后习题的答案。
第一章:计算机系统概述1. 详细解释计算机的五大组成部分。
答:计算机由五大部分组成,分别是中央处理器(CPU)、存储器、输入设备、输出设备和外部设备。
CPU负责执行指令和处理数据,存储器用于存储程序和数据,输入设备用于输入数据和指令,输出设备用于输出结果,外部设备用于与计算机系统进行交互。
2. 描述冯·诺依曼计算机结构模型的主要特点。
答:冯·诺依曼计算机结构模型的特点主要包括存储程序控制、数据和指令以二进制表示、按顺序执行指令、以及以存储器为中心。
3. 解释指令的含义,指出指令的两个基本组成部分。
答:指令是计算机中最基本的操作单位,用于定义计算机的操作和处理数据的方式。
指令由操作码和地址码两个基本部分组成。
操作码指明要执行的操作,地址码指明所需操作数或结果存放的地址。
4. 什么是指令周期?什么是时钟周期?答:指令周期是指计算机处理一条指令所需的全部时间,包括取指令、执行指令、访存和写回结果。
时钟周期是指计算机中使用的基本时钟信号的时间间隔,决定了计算机的运行速度。
第二章:计算机的发展与应用1. 简述冯·诺依曼结构的计算机和哈佛结构的计算机有什么区别?答:冯·诺依曼结构的计算机将存储器用于存放程序和数据,指令和数据共享同一存储空间;而哈佛结构的计算机将指令和数据存放在不同的存储空间,可以同时取指令和访问数据,提高了运行效率。
2. 解释并举例说明并行计算和串行计算的区别。
答:并行计算是指多个处理器同时进行计算任务,各个处理器独立运行,可以加快计算速度。
此文档下载后即可编辑第1章计算机系统概论1. 什么是计算机系统、计算机硬件和计算机软件?硬件和软件哪个更重要?解:P3计算机系统:由计算机硬件系统和软件系统组成的综合体。
计算机硬件:指计算机中的电子线路和物理装置。
计算机软件:计算机运行所需的程序及相关资料。
硬件和软件在计算机系统中相互依存,缺一不可,因此同样重要。
2. 如何理解计算机的层次结构?答:计算机硬件、系统软件和应用软件构成了计算机系统的三个层次结构。
(1)硬件系统是最内层的,它是整个计算机系统的基础和核心。
(2)系统软件在硬件之外,为用户提供一个基本操作界面。
(3)应用软件在最外层,为用户提供解决具体问题的应用系统界面。
通常将硬件系统之外的其余层称为虚拟机。
各层次之间关系密切,上层是下层的扩展,下层是上层的基础,各层次的划分不是绝对的。
3. 说明高级语言、汇编语言和机器语言的差别及其联系。
答:机器语言是计算机硬件能够直接识别的语言,汇编语言是机器语言的符号表示,高级语言是面向算法的语言。
高级语言编写的程序(源程序)处于最高层,必须翻译成汇编语言,再由汇编程序汇编成机器语言(目标程序)之后才能被执行。
4. 如何理解计算机组成和计算机体系结构?答:计算机体系结构是指那些能够被程序员所见到的计算机系统的属性,如指令系统、数据类型、寻址技术组成及I/O机理等。
计算机组成是指如何实现计算机体系结构所体现的属性,包含对程序员透明的硬件细节,如组成计算机系统的各个功能部件的结构和功能,及相互连接方法等。
5. 冯•诺依曼计算机的特点是什么?解:冯•诺依曼计算机的特点是:P8●计算机由运算器、控制器、存储器、输入设备、输出设备五大部件组成;●指令和数据以同同等地位存放于存储器内,并可以按地址访问;●指令和数据均用二进制表示;●指令由操作码、地址码两大部分组成,操作码用来表示操作的性质,地址码用来表示操作数在存储器中的位置;●指令在存储器中顺序存放,通常自动顺序取出执行;●机器以运算器为中心(原始冯•诺依曼机)。
第 1 章计算机系统概论1.什么是计算机系统、计算机硬件和计算机软件?硬件和软件哪个更重要?解: P3计算机系统:由计算机硬件系统和软件系统构成的综合体。
计算机硬件:指计算机中的电子线路和物理装置。
计算机软件:计算机运转所需的程序及有关资料。
硬件和软件在计算机系统中互相依存,缺一不可以,所以相同重要。
2.怎样理解计算机的层次构造?答:计算机硬件、系统软件和应用软件构成了计算机系统的三个层次构造。
(1 )硬件系统是最内层的,它是整个计算机系统的基础和中心。
(2 )系统软件在硬件以外,为用户供给一个基本操作界面。
(3 )应用软件在最外层,为用户供给解决详细问题的应用系统界面。
往常将硬件系统以外的其余层称为虚构机。
各层次之间关系亲密,上层是下层的扩展,基层是上层的基础,各层次的区分不是绝对的。
3.说明高级语言、汇编语言和机器语言的差异及其联系。
答:机器语言是计算机硬件能够直接识其余语言,汇编语言是机器语言的符号表示,高级语言是面向算法的语言。
高级语言编写的程序(源程序)处于最高层,一定翻译成汇编语言,再由汇编程序汇编成机器语言(目标程序)以后才能被执行。
4.怎样理解计算机构成和计算机系统构造?答:计算机系统构造是指那些能够被程序员所见到的计算机系统的属性,如指令系统、数据种类、寻址技术构成及 I/O 机理等。
计算机构成是指怎样实现计算机系统构造所表现的属性,包含对程序员透明的硬件细节,如构成计算机系统的各个功能零件的构造和功能,及互相连结方法等。
5.冯 ? 诺依曼计算机的特色是什么?解:冯? 诺依曼计算机的特色是:P8计算机由运算器、控制器、储存器、输入设施、输出设施五大零件构成;指令和数据以同相同地位寄存于储存器内,并能够按地点接见;指令和数据均用二进制表示;指令由操作码、地点码两大多半构成,操作码用来表示操作的性质,地址码用来表示操作数在储存器中的地点;指令在储存器中次序寄存,往常自动次序拿出履行;机器以运算器为中心(原始冯?诺依曼机。
第1章计算机系统概论1. 什么是计算机系统、计算机硬件和计算机软件?硬件和软件哪个更重要?解:P3计算机系统:由计算机硬件系统和软件系统组成的综合体.计算机硬件:指计算机中的电子线路和物理装置.计算机软件:计算机运行所需的程序及相关资料.硬件和软件在计算机系统中相互依存,缺一不可,因此同样重要。
2。
如何理解计算机的层次结构?答:计算机硬件、系统软件和应用软件构成了计算机系统的三个层次结构。
(1)硬件系统是最内层的,它是整个计算机系统的基础和核心。
(2)系统软件在硬件之外,为用户提供一个基本操作界面。
(3)应用软件在最外层,为用户提供解决具体问题的应用系统界面.通常将硬件系统之外的其余层称为虚拟机。
各层次之间关系密切,上层是下层的扩展,下层是上层的基础,各层次的划分不是绝对的。
3. 说明高级语言、汇编语言和机器语言的差别及其联系.答:机器语言是计算机硬件能够直接识别的语言,汇编语言是机器语言的符号表示,高级语言是面向算法的语言。
高级语言编写的程序(源程序)处于最高层,必须翻译成汇编语言,再由汇编程序汇编成机器语言(目标程序)之后才能被执行。
4。
如何理解计算机组成和计算机体系结构?答:计算机体系结构是指那些能够被程序员所见到的计算机系统的属性,如指令系统、数据类型、寻址技术组成及I/O机理等。
计算机组成是指如何实现计算机体系结构所体现的属性,包含对程序员透明的硬件细节,如组成计算机系统的各个功能部件的结构和功能,及相互连接方法等。
5。
冯•诺依曼计算机的特点是什么?解:冯•诺依曼计算机的特点是:P8●计算机由运算器、控制器、存储器、输入设备、输出设备五大部件组成;●指令和数据以同同等地位存放于存储器内,并可以按地址访问;●指令和数据均用二进制表示;●指令由操作码、地址码两大部分组成,操作码用来表示操作的性质,地址码用来表示操作数在存储器中的位置;●指令在存储器中顺序存放,通常自动顺序取出执行;●机器以运算器为中心(原始冯•诺依曼机).6. 画出计算机硬件组成框图,说明各部件的作用及计算机系统的主要技术指标。
第9章控制单元的功能9.1复习笔记一、微操作命令的分析1.取指周期取指令的过程可归纳为以下几个操作:(1)现行指令地址送至存储器地址寄存器,记作PC→MAR;(2)启动主存作读操作,记作I→R;(3)将MAR所指的主存单元中的内容经数据总线读至MDR内,记作M(MAR)→MDR;(4)将MDR的内容送至IR,记作MDR→IR;(5)指令的操作码送至CU译码,记作OP(PC)→CU;(6)形成下一条指令的地址,记作(PC)+1→PC。
2.间址周期间址周期完成取操作数有效地址的任务,具体操作如下:(1)将指令的地址码部分送至存储器地址寄存器,记作Ad(IR)→MAR;(2)启动主存作读操作,记作I→R;(3)将MAR所指的主存单元中的内容经数据总线读至MDR内,记作M(MAR)→MDR;(4)将有效地址送至指令寄存器的地址字段,记作MDR→Ad(IR)。
3.执行周期不同指令执行周期的微操作是不同的,下面分别讨论非访存指令、访存指令和转移类指令的微操作:(1)非访存指令①清除累加器指令CLA②累加器取反指令COM③算术右移一位指令SHR④循环左移一位指令CSL⑤停机指令STP(2)访存指令①加法指令ADD Xa.将指令的地址码部分送至存储器地址寄存器,记作Ad(IR)→MAR;b.启动主存作读操作,记作I→R;c.将MAR所指的主存单元中的内容经数据总线读至MDR内,记作M(MAR)→MDR;d.给ALU发送加命令,将ACC的内容和MDR的内容相加,结果存于ACC,记作(ACC)+(MDR)→ACC;②存数指令STA Xa.将指令的地址码部分送至存储器地址寄存器,记作Ad(IR)→MAR;b.启动主存作写操作,记作I→W;c.将累加器内容送至MDR,记作ACC→MDR;d.将MDR的内容写入到MAR所指的主存单元中,记作MDR→M(MAR)。
③取数指令LDA Xa.将指令的地址码部分送至存储器地址寄存器,记作Ad(IR)→MAR;b.启动主存作读操作,记作I→R;c.将MAR所指的主存单元中的内容经数据总线读至MDR内,记作M(MAR)→MDR;d.将MDR的内容送至ACC,记作MDR→ACC。
第一章计算机系统概论习题答案1、答:计算机系统由硬件和软件两大部分组成。
硬件即指计算机的实体部分,它由看得见摸的着的各种电子元器件,各类光电、机设备的实物组成,如主机、外设等。
软件时看不见摸不着的,由人们事先编制成具有各类特殊功能的信息组成,用来充分发挥硬件功能,提高机器工作效率,便于人们使用机器,指挥整个计算机硬件系统工作的程序集合。
软件和硬件都很重要。
2、答:从计算机系统的层次结构来看,它通常可有五个以上的不同级组成,每一个上都能进行程序设计。
由下至上可排序为:第一级微程序机器级,微指令由硬件直接执行;第二级传统机器级,用微程序解释机器指令;第三级操作系统级,一般用机器语言程序解释作业控制语句;第四级汇编语言机器级,这一级由汇编程序支持合执行;第五级高级语言机器级,采用高级语言,由各种高级语言编译程序支持合执行,还可以有第六级应用语言机器级,采用各种面向问题的应用语言。
3、答:机器语言由0、1代码组成,是机器能识别的一种语言。
汇编语言是面向机器的语言,它由一些特殊的符号表示指令,高级语言是面向用户的语言,它是一种接近于数学的语言,直观,通用,与具体机器无关。
4、答:计算机组成是指如何实现计算机体系结构所体现的属性,它包含了许多对程序员来说是透明的硬件细节。
计算机体系结构是指那些能够被程序员所见到的计算机系统的属性,即概念性的结构与功能特性,通常是指用机器语言编程的程序员所看到的传统机器的属性,包括指令集、数据类型、存储器寻址技术、I/O机理等等,大都属于抽象的属性。
5、答:特点是:(1) 计算机由运算器、存储器、控制器和输入设备、输出设备五大部件组成(2) 指令和数据以同等的地位存放于存储器内,并可以按地址寻ACC:累加器,用于存放操作数,如被加数及和,被减数及差,乘积高位、被除数及系数等。
MQ:乘商寄存器,用于存放乘数及乘积地位、商。
X:操作数寄存器,用于存放加数、减数、被乘数、除数。
ALU:算逻部件,用来完成算术逻辑运算。
第1章计算机系统概论1. 什么是计算机系统、计算机硬件和计算机软件?硬件和软件哪个更重要?解:P3计算机系统:由计算机硬件系统和软件系统组成的综合体。
计算机硬件:指计算机中的电子线路和物理装置。
计算机软件:计算机运行所需的程序及相关资料。
硬件和软件在计算机系统中相互依存,缺一不可,因此同样重要。
2. 如何理解计算机的层次结构?答:计算机硬件、系统软件和应用软件构成了计算机系统的三个层次结构。
(1)硬件系统是最内层的,它是整个计算机系统的基础和核心。
(2)系统软件在硬件之外,为用户提供一个基本操作界面。
(3)应用软件在最外层,为用户提供解决具体问题的应用系统界面。
通常将硬件系统之外的其余层称为虚拟机。
各层次之间关系密切,上层是下层的扩展,下层是上层的基础,各层次的划分不是绝对的。
3. 说明高级语言、汇编语言和机器语言的差别及其联系。
答:机器语言是计算机硬件能够直接识别的语言,汇编语言是机器语言的符号表示,高级语言是面向算法的语言。
高级语言编写的程序(源程序)处于最高层,必须翻译成汇编语言,再由汇编程序汇编成机器语言(目标程序)之后才能被执行。
4. 如何理解计算机组成和计算机体系结构?答:计算机体系结构是指那些能够被程序员所见到的计算机系统的属性,如指令系统、数据类型、寻址技术组成及I/O机理等。
计算机组成是指如何实现计算机体系结构所体现的属性,包含对程序员透明的硬件细节,如组成计算机系统的各个功能部件的结构和功能,及相互连接方法等。
5. 冯•诺依曼计算机的特点是什么?解:冯•诺依曼计算机的特点是:P8●计算机由运算器、控制器、存储器、输入设备、输出设备五大部件组成;●指令和数据以同同等地位存放于存储器内,并可以按地址访问;●指令和数据均用二进制表示;●指令由操作码、地址码两大部分组成,操作码用来表示操作的性质,地址码用来表示操作数在存储器中的位置;●指令在存储器中顺序存放,通常自动顺序取出执行;●机器以运算器为中心(原始冯•诺依曼机)。
第一章计算机系统概论1. 什么是计算机系统、计算机硬件和计算机软件?硬件和软件哪个更重要?解:P3计算机系统:由计算机硬件系统和软件系统组成的综合体。
计算机硬件:指计算机中的电子线路和物理装置。
计算机软件:计算机运行所需的程序及相关资料。
硬件和软件在计算机系统中相互依存,缺一不可,因此同样重要。
5. 冯•诺依曼计算机的特点是什么?解:冯•诺依曼计算机的特点是:P8●计算机由运算器、控制器、存储器、输入设备、输出设备五大部件组成;●指令和数据以同同等地位存放于存储器内,并可以按地址访问;●指令和数据均用二进制表示;●指令由操作码、地址码两大部分组成,操作码用来表示操作的性质,地址码用来表示操作数在存储器中的位置;●指令在存储器中顺序存放,通常自动顺序取出执行;●机器以运算器为中心(原始冯•诺依曼机)。
7. 解释下列概念:主机、CPU、主存、存储单元、存储元件、存储基元、存储元、存储字、存储字长、存储容量、机器字长、指令字长。
解:P9-10主机:是计算机硬件的主体部分,由CPU和主存储器MM合成为主机。
CPU:中央处理器,是计算机硬件的核心部件,由运算器和控制器组成;(早期的运算器和控制器不在同一芯片上,现在的CPU内除含有运算器和控制器外还集成了CACHE)。
主存:计算机中存放正在运行的程序和数据的存储器,为计算机的主要工作存储器,可随机存取;由存储体、各种逻辑部件及控制电路组成。
存储单元:可存放一个机器字并具有特定存储地址的存储单位。
存储元件:存储一位二进制信息的物理元件,是存储器中最小的存储单位,又叫存储基元或存储元,不能单独存取。
存储字:一个存储单元所存二进制代码的逻辑单位。
存储字长:一个存储单元所存二进制代码的位数。
存储容量:存储器中可存二进制代码的总量;(通常主、辅存容量分开描述)。
机器字长:指CPU一次能处理的二进制数据的位数,通常与CPU的寄存器位数有关。
指令字长:一条指令的二进制代码位数。
第9章控制单元的功能1.设CPU内有这些部件:PC、IR、MAR、MDR、AC、CU。
(1)写出取指周期的全部微操作。
(2)写出减法指令“SUB X”、取数指令“LDA X”、存数指令“STA X”(X均为主存地址)在执行阶段所需的全部微操作。
(3)当上述指令为间接寻址时,写出执行这些指令所需的全部微操作。
(4)写出无条件转移指令“JMP Y”和结果溢出则转指令“BA0,Y”在执行阶段所需的全部微操作。
答:(1)不论什么指令,取指周期都需有下列微操作:PC→MAR 现行指令地址→MAR1→R 命令存储器读M(MAR)→MDR 现行指令从存储器中读至MDRMDR→IR 现行指令→IROP(IR)→CU 指令的操作码→CU(PC)+1→PC 形成下一条指令的地址(2)①减法指令SUB X执行阶段所需的全部微操作Ad(IR)→MAR 指令的地址码字段→MAR1→R 命令存储器读M(MAR)→MDR 操作数从存储器中读至MDR(ACC)-(MDR)→ACC 两数相减结果送ACC②取数指令LAD X执行阶段所需的全部微操作Ad(IR)→MAR 指令的地址码字段→MAR1→R 命令存储器读M(MAR)→MDR 操作数从存储器中读至MDRMDR→ACC 操作数③存数指令STA X执行阶段所需的全部微操作Ad(IR)→MAR 指令的地址码字段→MAR1→W 命令存储器写ACC→MDR 欲写入的数据→MDRMDR→M(MAR)数据写至存储其中(3)当上述指令为间接寻址时,需增加间址周期的微操作。
这三条指令在间址周期的微操作相同,即Ad(IR)→MAR 指令的地址码字段→MAR1→R 命令存储器读M(MAR)→MDR 数据写至存储器中进入执行周期,三条指令的第一个微操作均为MDR→MAR(有效地址送MAR),其余微操作不变。
(4)①无条件转移指令JMP Y执行阶段的微操作Ad(IR)→PC 转移(目标)地址Y→PC②结果溢出则转指令BAO Y执行阶段的微操作Z·Ad(IR)→PC 当Z=1时,转移(目标)地址Y→PC(Z为标记触发器,结果为0时Z=1)2.控制单元的功能是什么?其输入受什么控制?答:控制单元的功能:为完成不同指令所发出的各种操作命令—这些命令(又称控制信号)控制计算机的所有部件有次序地完成相应的操作,以达到执行程序的目的。
10.2课后习题详解
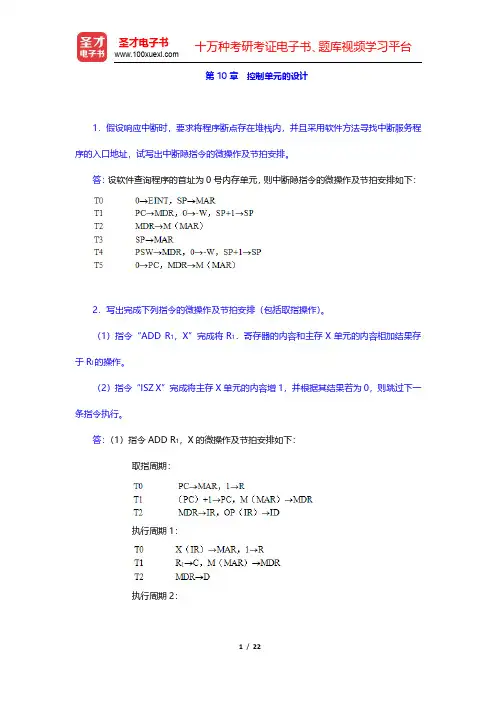
1.假设响应中断时,要求将程序断点存在堆栈内,并且采用软件方法寻找中断服务程序的入口地址,试写出中断隐指令的微操作及节拍安排。
答:设软件查询程序的首址为0号内存单元,则中断隐指令的微操作及节拍安排如表10-1所示。
表10-1
2.写出完成下列指令的微操作及节拍安排(包括取指操作)。
(1)指令“ADD R1,X”完成将R1寄存器的内容和主存X单元的内容相加结果存于R1的操作。
(2)指令“ISZ X”完成将主存X单元的内容增1,并根据其结果若为0,则跳过下一条指令执行。
答:(1)指令“ADD R1,X”的微操作及节拍安排如表10-2所示。
取指周期:
表10-2(a)
执行周期:
表10-2(b)
(2)指令“ISZ X”的微操作及节拍安排如表10-3所示。
取指周期:
表10-3(a)
执行周期1:
表10-3(b)
执行周期2:
表10-3(c)
3.按序写出如表10-4所示程序所需的全部微操作命令及节拍安排。
表10-4
答:(1)LDA 306指令所需全部微操作命令及节拍安排如表10-5所示。
取指周期:
表10-5(a)
执行周期:
表10-5(b)
(2)ADD 307指令所需全部微操作命令及节拍安排如表10-6所示。
取指周期:
表10-6(a)
执行周期:
表10-6(b)
(3)BAN 304指令所需全部微操作命令及节拍安排如表10-7所示。
取指周期:
表10-7(a)
执行周期:(设N为结果为负标志)
表10-7(b)
(4)STA 305指令所需全部微操作命令及节拍安排如表10-8所示。
取指周期:
表10-8(a)
执行周期:
表10-8(b)
(5)STP指令所需全部微操作命令及节拍安排如表10-9所示。
取指周期:
表10-9(a)
执行周期:
表10-9(b)
4.在单总线结构的计算机中,用该总线连接了指令寄存器IR、程序计数器PC、存储
器地址寄存器MAR、存储器数据寄存器MDR、通用寄存器R0~R7的输入和输出端。
ALU 的两个输入端分别与总线和寄存器Y的输出端相连,ALU的输出端与寄存器2的输入端相连。
Y的输入端与总线连接,2的输出端与总线连接该机有下列指令:
ADD R1,R2,R3;//(R2)+(R3)→R1
JMP *K;//(PC)+(K-1)→PC
LOAD R1,mem;//(mem)→R1
STORE mem,R2;//R2→mem
写出控制器执行上述指令的微操作及节拍安排。
答:(1)四条指令的取值周期的微操作命令及节拍安排如表10-10所示。
表10-10
(2)四条指令执行周期的微操作命令及节拍安排如表10-11所示。
①“ADD R1,R2,R3”指令
表10-11(a)
②“JMP *K”指令
表10-11(b)。