全国电子设计竞赛控制类03年赛题---简易智能电动车完整版设计报告
- 格式:doc
- 大小:445.50 KB
- 文档页数:15
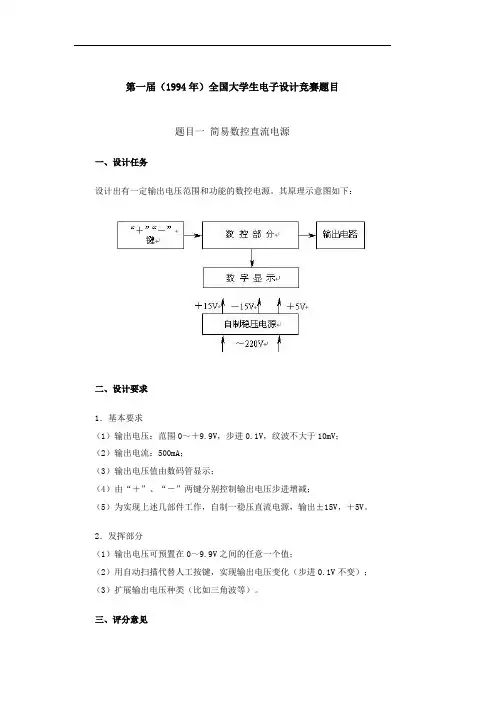
第一届(1994年)全国大学生电子设计竞赛题目题目一简易数控直流电源一、设计任务设计出有一定输出电压范围和功能的数控电源。
其原理示意图如下:二、设计要求1.基本要求(1)输出电压:范围0~+9.9V,步进0.1V,纹波不大于10mV;(2)输出电流:500mA;(3)输出电压值由数码管显示;(4)由“+”、“-”两键分别控制输出电压步进增减;(5)为实现上述几部件工作,自制一稳压直流电源,输出±15V,+5V。
2.发挥部分(1)输出电压可预置在0~9.9V之间的任意一个值;(2)用自动扫描代替人工按键,实现输出电压变化(步进0.1V不变);(3)扩展输出电压种类(比如三角波等)。
三、评分意见项目得分基本要求方案设计与论证、理论计算与分析、电路图30实际完成情况50总结报告20 发挥部分完成第一项 5完成第二项15完成第三项20题目二多路数据采集系统一、设计任务设计一个八路数据采集系统,系统原理框图如下:主控器能对50米以外的各路数据,通过串行传输线(实验中用1米线代替)进行采集的显示和显示。
具体设计任务是:(1)现场模拟信号产生器。
(2)八路数据采集器。
(3)主控器。
二、设计要求1.基本要求(1)现场模拟信号产生器:自制一正弦波信号发生器,利用可变电阻改变振荡频率,使频率在200Hz~2kHz范围变化,再经频率电压变换后输出相应1~5V直流电压(200Hz对应1V,2kHz对应5V)。
(2)八路数据采集器:数据采集器第1路输入自制1~5V直流电压,第2~7路分别输入来自直流源的5,4,3,2,1,0V直流电压(各路输入可由分压器产生,不要求精度),第8路备用。
将各路模拟信号分别转换成8位二进制数字信号,再经并/串变换电路,用串行码送入传输线路。
(3)主控器:主控器通过串行传输线路对各路数据进行采集和显示。
采集方式包括循环采集(即1路、2路……8路、……1路)和选择采集(任选一路)二种方式。
电子设计大赛控制类题目及准备(总5页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除1.历届的“控制类赛题”在9届电子设计竞赛中,“控制类赛题”除了1994和1995年外,其它每届都有,共有9题:①水温控制系统(1997年C题);②自动往返电动小汽车(2001年C题);③简易智能电动车(2003年E题);④液体点滴速度监控装置(2003年F题);⑤悬挂运动控制系统(2005年E题);⑥电动车跷跷板(2007年F题本科组);⑦电动车跷跷板(2007年J题高职高专组);⑧声音引导系统(2009年B题);⑨模拟路灯控制系统(2009年I题)。
⑩双车自动超车(2011年)(11)单摆自动控制系统(2011年)其中与电动小车有关的有6题。
2. 从历届赛题可以看到:从历届的赛题来看,主攻“控制类”赛题方向的同学需要了解和掌握:(1)系统控制方案和算法设计(2)微控制器电路模块制作和编程:如:AT89S52、MSP430F1611、MSP430F2274、Atmega128、PIC16F628A、ADuC841、C8051F022、W78E51B 、STM32F103VET6等等。
(3)微控制器外围电路模块制作和编程:如键盘及LED数码管显示器模块、RS-485总线通信模块、CAN总线通信模块、无线收发器电路模块、ADC模块、DAC模块等等。
(4)传感器电路模块制作和编程:如光电传感器模块、超声波发射与接收模块、温湿度传感器模块、倾角传感器模块、角度传感器模块、音频信号检测模块等等。
(5)电机控制电路模块制作和编程:如直流电机驱动模块(L298 N)、步进电机驱动模块(L297+L298N,TA8435H)、舵机控制模块、光电隔离模块等等。
(6)放大器电路模块制作:小信号放大器电路模块、滤波器电路模块、音频放大器(7)电源电路模块制作(8)电动小车制作3. 建议:“控制类”赛题中所涉及到的一些知识点,特别是有关自动控制理论与算法方面,对有些专业的同学来讲,在专业课程中是没有的,需要自己去搞清楚。
简易智能电动车目录一、方案比较、设计与论证 (2)二、理论分析与计算 (5)三、电路图及设计文件 (6)四、程序设计思路与流程图 (10)五、测试方法、数据及结果分析 (12)六、设计总结 (14)七、主要测试仪器 (15)八、参考资料 (15)九、附件一(系统设计总电路图) (16)一、方案比较、设计与论证本设计基于闭环测量、控制的原理,通过传感器将检测信号反馈给微处理,实时监控小车的运动状态并显示必要信息。
利用微处理产生脉冲宽度调制(PWM)信号,通过驱动电路来控制直流电机的转动,从而实现小车的直线行走、左右拐弯、倒退、停止、躲避并绕过障碍物、自动寻找引导光源并定位等功能。
功能框图见图1。
整个设计关键在于传感器的选择和安装,这些传感器要能够给出准确的信号让微处理来控制小车的行走。
图11、小车的比较与选择常见的电动小车是两轮驱动,一个电机驱动后面两个轮子转动,另一个电机控制前面两个轮子转向。
它的缺点是:转弯的角度较大且固定,不能精确地控制转角的大小。
小车在运行时平稳性较差。
而四轮驱动的小车,左右两边的轮子分别由两个电机控制,可以通过改变左右电机的转速来控制小车的转向,转弯的角度可大可小,这种控制方法能够使小车平稳地实现拐弯的功能,运行时车身稳定、没有左右摇摆的现象。
综合两者的特点,我们在设计中选择了四轮驱动的小车,小车的尺寸为14cm ×25cm,完全符合题目中15cm×35cm的尺寸要求。
2、传感器的比较与选择(1)路径识别传感器要求准确识别黑线与白纸,给出识别信号。
常用的传感器有可见光光电传感器、红外光光电传感器、CCD光电传感器等。
我们经过比较,选用了体积小、抗干扰性强、价格便宜的红外光光电传感器GK-SB5,配以外围电路可准确实现识别黑色和白色的功能。
GK-SB5使用的是红外光发射和接收,受外界环境的影响较小,另外GK-SB5体积较小,便于调节位置,以适应识别不同宽度黑线的需要。
(2023)全国电子竞赛设计报告(A题)(一)竞赛概况•本次竞赛主题为“智能家居”,旨在推进智能化技术在家庭生活中的应用。
•参赛者需自行设计和实现一款智能家居产品,并同时提交设计报告和作品展示视频。
•参赛者须符合竞赛报名要求,并严格遵守竞赛规定。
技术难点•如何通过传感器将家庭生活信息实时反馈给智能家居系统。
•如何利用AI技术对家庭生活信息进行分析和处理,并做出可靠的智能决策。
•如何确保智能家居设备的安全性和可靠性。
设计思路•在建立智能家居系统时,我们采用目前最先进的5G 技术实现带宽的提升,以实现信息的快速传输和处理。
•我们采用单板计算机作为主控制器,将所有传感器数据传输到主控制器,然后通过AI技术做出最佳决策,并控制各设备的操作。
•我们在智能门锁上加入了人脸识别技术,并且设计了多节点的智能路由器来解决设备连接问题。
具体实现•设计基于Arduino的智能家居主板,实现与各传感器的连接,并将数据传输到主控制器。
•建立基于Java的智能家居决策系统,采用机器学习算法实现数据分析和处理。
•采用可扩展的智能路由器架构,基于OpenWRT实现多节点连接,提高设备安全性和数据传输效率。
展示视频•我们制作了详细的展示视频,展示了我们的智能家居系统的各项功能和优势。
•视频中包含了我们的设备连接、智能门锁、环境温度控制、人脸识别等多个模块的演示和操作。
结语•通过本次竞赛,我们对智能化技术的应用有了更深刻的理解,并学习到了新的技术和知识。
•我们感谢竞赛组委会的主办,也感谢所有的志愿者和评委的支持和帮助。
进一步改进•在竞赛过程中,我们也发现了一些不足之处,比如针对不同家庭的需求进行定制化的设计不足,设备之间的连接还需要更加稳定等。
•在未来我们将进一步优化我们的智能家居系统,提供更加精细化的服务,并探索更加先进的技术,提高性能和安全性,让智能家居更贴近人们的生活。
总结•通过本次竞赛,我们对智能家居技术的实现和发展有了更全面的认识,并锻炼了我们的团队合作和技术能力。
2003年(第六届)
A题:电压控制LC振荡器
B题:宽带放大器
C题:低频数字式相位测量仪
D题:简易逻辑分析仪
E题:简易智能电动车
F题:液体点滴速度监控装置2005年(第七届)
A题正弦信号发生器
B题集成运放参数测试仪
C题简易频谱分析仪
D题单工无线呼叫系统
E题悬挂运动控制系统
F题数控直流电流源
G题三相正弦波变频电源2007年
A题音频信号分析仪
B题无线识别装置
C题数字存储示波器
D题程控滤波器
E题开关稳压电源
F题电动车跷跷板设计
G题积分型直流数字电压表
H题信号发生器
I题可控放大器
J题电动车跷跷板
2009年
A题--光伏并网发电模拟装置
B题--声音导引系统
C题--宽带直流放大器
D题--无线环境监测模拟装置
E电能收集充电器收集充电器
F题--数字幅频均衡的功率放大器
G题--低频功率放大器
H题--LED点阵书写显示屏
I题--模拟路灯控制系统
2011年
A-开关电源模块并联供电系统
B-基于自由摆的平板控制系统
C-智能小车
D-LC谐振放大器
E-简易数字信号传输性能分析仪
F-帆板控制系统
G-简易自动电阻测试仪
H-波形采集、存储与回放系统。
历届国赛出现过的赛题(1994~2011)控制类赛题(12题):水温控制系统(1997年C题)自动往返电动小汽车(2001年C题)简易智能电动车(2003年E题)液体点滴速度监控装置(2003年F题)悬挂运动控制系统(2005年E题)电动车跷跷板(2007年F题本科组)电动车跷跷板(2007年J题高职高专组)声音引导系统(2009年B题)模拟路灯控制系统(2009年I题高职高专组)基于自由摆的平板控制系统(2011年B题)智能小车(2011年C题)帆板控制系统(2011年F 题)仪器仪表类赛题(14题):简易电阻、电容和电感测试仪(1995年D题)简易数字频率计(1997年B题)数字式工频有效值多用表(1999年B题)频率特性测试仪(1999年C题)简易数字存储示波器(2001年B题)低频数字式相位测量仪(2003年C题)简易逻辑分析仪(2003年D题)集成运放参数测试仪(2005年B题)简易频谱分析仪(2005年C题)音频信号分析仪(2007年A题本科组)数字示波器(2007年C题本科组)积分式直流数字电压表(2007年G题高职高专组)简易数字信号传输性能分析仪(2011年E题)简易自动电阻测试仪(2011年G 题)信号源类赛题(5题):实用信号源的设计和制作(1995年B题)波形发生器(2001年A题)电压控制LC振荡器(2003年A题)正弦信号发生器(2005年第七届A题)信号发生器(2007年H题高职高专组)电源类赛题(8题):简易数控直流电源(1994年A题)直流稳压电源(1997年A题)数控直流电流源(2005年F题)三相正弦波变频电源(2005年G题)开关稳压电源(2007年本科组E题)光伏并网发电模拟装置(2009年A题)电能搜集充电器(2009年E题)开关电源模块并联供电系统(2011年A题)高频无线电类赛题(7题):简易无线电遥控系统(1995年C题)调幅广播收音机(1997年D题)短波调频接收机(1999年D题)调频收音机(2001年F题)单工无线呼叫系统(2005年D题)无线识别装置(2007年B题本科组)无线环境监测模拟装置(2009年D题)放大器类赛题(10题):实用低频功率放大器(1995年A题)测量放大器(1999年A题)高效率音频功率放大器(2001年D题)宽带放大器(2003年B题)程控滤波器(2007年D题本科组)可控放大器(2007年I题高职高专组)数字幅频均衡的功率放大器(2009年F题)低频功率放大器(2009年G题高职高专组)宽带直流放大器(2009年C题)LC 谐振放大器(2011年D 题)数据采集与处理类赛题(5题):多路数据采集系统(1994年B题)数字化语音存储与回放系统(1999年E题)数据采集与传输系统(2001年E题)LED点阵书写显示屏(2009年H题高职高专组)波形采集、存储与回放系统(2011年H题)。
第六届(2003年)全国大学生电子设计竞赛题目电压控制LC 振荡器(A 题)一、任务设计并制作一个电压控制LC 振荡器。
二、要求1、基本要求(1)振荡器输出为正弦波,波形无明显失真。
(2)输出频率范围:15MHz~35MHz。
(3)输出频率稳定度:优于10-3。
(4)输出电压峰-峰值:V p-p=1V±0.1V。
(5)实时测量并显示振荡器输出电压峰-峰值,精度优于10%。
(6)可实现输出频率步进,步进间隔为1MHz±100kHz。
2、发挥部分(1)进一步扩大输出频率范围。
(2)采用锁相环进一步提高输出频率稳定度,输出频率步进间隔为100kHz。
(3)实时测量并显示振荡器的输出频率。
(4)制作一个功率放大器,放大LC 振荡器输出的30MHz 正弦信号,限定使用E=12V 的单直流电源为功率放大器供电,要求在50Ω纯电阻负载上的输出功率≥20mW,尽可能提高功率放大器的效率。
(5)功率放大器负载改为50Ω电阻与20pF 电容串联,在此条件下50Ω电阻上的输出功率≥20mW,尽可能提高放大器效率。
(6)其它。
三、评分标准四、说明1、需留出末级功率放大器电源电流I C0(或I D0)的测量端,用于测试功率放大器的效率。
宽带放大器(B 题)一、任务设计并制作一个宽带放大器。
二、要求1、基本要求(1)输入阻抗≥1kΩ;单端输入,单端输出;放大器负载电阻。
(2)3dB 通频带10kHz~6MHz,在20kHz~5MHz 频带内增益起伏≤1dB。
(3)最大增益≥40dB,增益调节范围10dB~40dB(增益值6 级可调,步进间隔6dB,增益预置值与实测值误差的绝对值≤2dB),需显示预置增益值。
(4)最大输出电压有效值≥3V,数字显示输出正弦电压有效值。
(5)自制放大器所需的稳压电源。
2、发挥部分(1)最大输出电压有效值≥6V。
(2)最大增益≥58dB (3dB 通频带10kHz~6MHz,在20kHz~5MHz 频带内增益起伏≤1dB),增益调节范围10dB~58dB(增益值9 级可调,步进间隔6dB,增益预置值与实测值误差的绝对值≤2dB),需显示预置增益值。
全国电子设计大赛智能小车(C题)设计报告中文摘要:采用C8051F020单片机为控制芯片控制小车的速度及转向。
其中小车驱动由L298N 驱动电路完成,速度由单片机输出的PWM波控制以实现小车在超速区的超速行驶,利用红外对管检测黑线和障碍物以实现小车的正常行驶和转弯,避免在行驶过程中越界和碰撞。
关键词:智能小车;STC89C52单片机; L298N;红外对管目录第一章方案设计与论证 (3)主控系统 (3)电机驱动模块 (3)信号检测模块 (3)两车通信模块 (4)电源模块 (4)第二章硬件设计 (4)总体设计 (4)车体设计 (5)驱动电路 (5)信号检测与控制 (7)两车通信模块 (7)第三章软件设计 (8)主程序模块 (8)信号检测模块 (9)超车区域 (10)第四章测试与结果分析 (10)结束语 (11)参考文献 (11)一、方案设计与论证、主控系统根据设计要求,我认为此设计属于多输入量的复杂程序控制问题。
据此,拟定了以下两种方案并进行了综合的比较论证,具体如下:方案一:选用一片CPLD(如EPM7128LC84-15)作为系统的核心部件,实现控制与处理的功能。
CPLD具有速度快、编程容易、资源丰富、开发周期短等优点,可利用VHDL语言进行编写开发。
但CPLD在控制上较单片机有较大的劣势。
同时,CPLD的处理速度非常快,而小车的行进速度不可能太高,那么对系统处理信息的要求也就不会太高,在这一点上,MCU 就已经可以胜任了。
若采用该方案,必将在控制上遇到许许多多不必要增加的难题。
为此,我们不采用该种方案,进而提出了第二种设想。
方案二:采用单片机作为整个系统的核心,用其控制行进中的小车,以实现其既定的性能指标。
充分分析我们的系统,其关键在于实现小车的自动控制,而在这一点上,单片机就显现出来它的优势——控制简单、方便、快捷。
这样一来,单片机就可以充分发挥其资源丰富、有较为强大的控制功能及可位寻址操作功能、价格低廉等优点。
方案的选择与论证根据题目要求,系统可以分为四个基本模块,由四片八位单片机分别实现,一片89C52作为主机,三片89C2051为从机,主从机之间用单片机通信联系, 如图1所示。
对各模块的实现,分别有以下一些不同的方案。
1.测金属计算路程模块金属探测使用接近开关,对于路程的计算我们有以下两种方案:方案一 在小汽车前后各放一个接近开关J1、J2,相距为L。
设前端J1探测到金属片前端的时间是t1,J2探测到金属片前端的时间是t2,J1探测到金属片后端的时间是t3,J2探测到金属片后端的时间是t4。
假设小车在直线段上是匀速行驶,则小车的速度为L/(t2-t1),铁板中线到起跑线的距离是[L×t1+L×(t3-t1)/2]/(t2-t1),由于小车启动时是加速运动,所以距离要根据实验测得的数据进行修正。
方案二 在小车的前端放置一个接近开关。
通过光电传感器或霍尔开关使轮子每转一周产生若干个脉冲,单片机记下脉冲数和时间,再用实验的方法测出轮子的周长,就可以算出小车的平均速度,进而算出铁片中线到起点的距离。
光电传感器可以通过两种方法得到脉冲数,一种方法是在一个车轮上涂上黑白相间的条纹,通过黑白对光线的反射强弱不同产生脉冲,缺点是轮子表面凹凸不平容易干扰反射,并且经常使用,白的部分容易变黑干扰反射;另一种方法是按照光电编码盘的原理,在小车的主轴上套上一个布有均匀透光孔的圆盘,使用光电开关进行测速,由于我们的这辆小车的主轴上空间很小,所以这种方法也不容易实现。
霍尔开关的电路简单,安装也很方便(只需将小磁铁均匀地贴在轮子上即可),但是由于小磁铁放置太多彼此之间会互相干扰,所以小磁铁的放置数量是有限的(只能1 ̄3片),同时由于小磁铁之间是互斥的,所以很难实现精确均匀分布,因此使用霍尔开关的精度比较低。
综合以上方案,接近开关价格比较昂贵,我们本着节约的原则没有采用。
由于小车本身结构的原因,光电传感器不方便安装,安装上的效果可能也不会太好,所以也没有采用。
编号:C甲00102 2011年全国大学生电子设计竞赛智能小车(C题)参赛队员:张纪宽()高军()朱真真()专业:电气工程与自动化电子信息科学与技术智能小车摘要:本系统主要设计和制作了甲乙两辆智能小车,使用软件编程控制小车完成交替超车。
两车均采用两片ATmega16单片机作为主控芯片,使用L298N 驱动两个减速电机为小车提供动力,行进中使用激光发射与接收模块检测路面标志线,运用NRF2401无线传输模块实现甲乙两车的即时通讯,在两车行驶过程中通过无线通信确定哪辆车在前面,当到达超车区时后面的车赶超前面的车从而实现交替超车。
本系统还增加了光电传感器用于防止小车撞车,并通过12864液晶屏实时显示小车行进的时间和行驶的圈数。
经过多次测试,小车运行良好,能够很好的完成基本部分和发挥部分的要求。
关键词:无线通信;激光检测;交替超车;Atmeg16单片机;光电开关Abstract: This system mainly design and the manufacture of the a b two vehicles intelligence, use the software control car finish alternate overtake. Two car all USES two pieces of ATmega16 monolithic processor as the main control chip, using L298N drive two reduction motor for the car to provide power, using a laser on the emitting and receiving module inspection mark line, use the NRF24L01 wireless transmission modules realize a b two car of instant messaging, in two driving process through the wireless communication determine which car in front, and when you get to the overtaking area the car behind, catch up the car in front and thus realizes the overtaking alternately. The system also increases the photoelectric sensor used to prevent the car crash, and through the 12864 LCD displays real time travel time and driving the car number of turns. After DuoCi test the car is running well, be better able to complete basic part and play a part of the request.Keywords: wireless communication;laser detection alternate;Atmeg16; overtaking photoelectric switch;single-chip microcomputer目录1.系统结构和功能介绍 (1)1.1设计任务与要求 (1)1.1.1设计任务 (1)1.1.2设计要求 (1)1.2理论分析与计算 (1)1.2.1信号检测与控制 (1)1.2.2两车之间的通信方法 (1)1.2.3系统节能减排方面的优化设计 (1)1.3系统基本方案 (1)1.4各模块方案的选择与论证 (2)1.4.1控制器的选择与论证 (2)1.4.2电机的选择与论证 (2)1.4.3电机驱动电路的选择与论证 (3)1.4.4无线通讯模块的选择与论证 (3)1.4.5标志线检测传感器的选择与论证 (3)2.系统硬件设计 (4)2.1 ATMega16的最小系统 (4)2.2 nRF24L01无线收发模块 (4)2.3电机驱动的电路设计 (5)2.4激光传感器收发电路 (6)3.软件设计 (6)3.1系统主程序流程图 (6)4.系统测试 (7)4.1测试方案及测试条件 (7)4.2测试表格 (7)4.3测试结果分析 (7)5.结束语 (8)6.参考文献 (8)附录 (9)1. 系统的结构和功能介绍1. 1设计任务与要求1.1.1设计任务设计并制作甲乙两辆小车通过软件编程,完成甲乙交替超车领跑的功能。
电子大赛-设计--电赛智能小车(共19页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--简易智能小车作品类别:第五类引言本系统采用 AT89S52 作为主控制芯片,整合控制器模块,金属探测模块,障碍物探测模块,路面检测模块,光源探测模块,电机驱动模块,实现小车自动寻路,金属探测,避障和寻光入库。
电路结构简单,可靠性能高,无论在结构和技术上都具有较好的科学性,在无人区引导探测金属矿源方面具有一定的应用前景。
方案设计一、设计要求:1.电动车从起跑线出发,沿引导线到达 B 点。
在“直道区”铺设的白纸下沿引导线埋有 1~3 块薄铁片。
电动车检测到薄铁片时需立即发出声光指示信息,并实时存储、显示在“直道区”检测到的薄铁片数目。
2.电动车到达 B 点以后进入“弯道区”,沿圆弧引导线到达 C 点要求电动车到达 C 点检处停车 5 秒,停车期间发出断续的声光信息。
3.电动车通过障碍区,在光源的引导下,进入车库。
简易路程图二、方案选择:1.电机驱动方案的选择与论证方案一:使用继电器对电机进行开关控制和调制。
但缺点很明显,这种电路不能和单片机直接连接,因为它返回“0”时,并没有接到地上,所以单片机并不能识别,反而都会的还是0,其次继电器响应慢而且机械结构容易坏。
方案二:使用三极管或者达林顿管,结合单片机输出 PWM 信号实现调速的目的,此方案易于实施,但若控制电机转动方向较为困难工作不是很稳定。
方案三:使用PWM控制芯片来实现对电机的控制,控制就是对脉冲的宽度进行调制的技术,即通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形。
2.路面寻线模块方案一:采用光敏传感器,根据白色背景和黑线反光程度的不同来判断传感器是否位于黑线上。
方案二:采用反射式红外传感器来进行探测。
只要选择数量和探测距离合适的红外传感器,可以准确的判断出黑线的位置。
方案选择:采用方案二。
方案一受环境光的影响太大,效果不佳。
2003年(第六届)
A题:电压控制LC振荡器
B题:宽带放大器
C题:低频数字式相位测量仪
D题:简易逻辑分析仪
E题:简易智能电动车
F题:液体点滴速度监控装置2005年(第七届)
A题正弦信号发生器
B题集成运放参数测试仪
C题简易频谱分析仪
D题单工无线呼叫系统
E题悬挂运动控制系统
F题数控直流电流源
G题三相正弦波变频电源2007年
A题音频信号分析仪
B题无线识别装置
C题数字存储示波器
D题程控滤波器
E题开关稳压电源
F题电动车跷跷板设计
G题积分型直流数字电压表
H题信号发生器
I题可控放大器
J题电动车跷跷板
2009年
A题--光伏并网发电模拟装置
B题--声音导引系统
C题--宽带直流放大器
D题--无线环境监测模拟装置
E电能收集充电器收集充电器
F题--数字幅频均衡的功率放大器
G题--低频功率放大器
H题--LED点阵书写显示屏
I题--模拟路灯控制系统
2011年
A-开关电源模块并联供电系统
B-基于自由摆的平板控制系统
C-智能小车
D-LC谐振放大器
E-简易数字信号传输性能分析仪
F-帆板控制系统
G-简易自动电阻测试仪
H-波形采集、存储与回放系统。
简易智能电动车------------------------------------------------------------------------------------------------------------------------摘要:本系统是采用普通玩具小车和红外传感器、光敏元件、金属探测器、光电开关以及霍尔元件结合,通过16位MCU——SPCE061A来调控的智能小车。
在小车行进的过程中,用SPCE061A带有的PWM功能,配合霍尔元件测速度,做到2个驱动电机的自动调速;用2个红外传感器感测地面行走轨迹;用4个光电开关的相应动作,规避正面、左右侧前方以及后面的障碍,并且控制定点倒车;利用双电机驱动的优势控制小车原地转动,用光敏元件追踪定点光源;当金属探测器感测到金属物品以后会报警示意。
本系统采用16位单片机SPCE061A做CPU,运算速度快,结构简单,电机控制快速准确,行走稳定,并带有语音播放的特色功能。
关键词:智能小车SPCE061A------------------------------------------------------------------------------------------------------------------------一、方案比较及论证:2.1系统构建1)采用凌阳公司16位单片机SPCE061A做核心控制;2)3个I/O口控制双刀双掷继电器从而控制电机的正向和反向转动;3)2个黑白线传感器,用来控制小车寻线行走;4)3个光电传感器控制小车寻找光源,进入车库;5)1个金属传感器用来检测金属铁片;6)4位LED动态显示检测到的金属铁片,并在到达终点以后显示总的路程和时间;7)4个障碍传感器,用来躲避障碍区的障碍物;8)1个霍尔元件用来记录小车的行进距离和时间;9)小车采用双电机,4轮驱动;电源为12节5号电池,分别为CPU,传感器和电机提供电源;小车的选择是关键,如下图:2.2 小车驱动用SPCE061A 的PWM 功能,配合3个双刀双掷的继电器,控制2个电机的转动方向以及转动速度2.3 传感器1、 寻线传感器:2个,并在一条直线上,安装在小车的头部底盘上,中间间隔3cm ,距离地面1cm 。
淮北师范大学2013年电赛预选赛方案设计(一)题目:简易智能电动车(2003年E题)姓名:杨东、卓泽坤、王定强实验地点:物理楼411时间:2013年4月1号—4月20号基于单片机的简易智能电动车摘要本设计以一片单片机STM32F103RB作为核心来控制自动往返小车,加以控制芯片L298N和单片机联合控制小车的前进与后退。
路面的黑带检测使用反射式红外传感器,通过STRT5000对输入的信号进行处理,使用TFT彩屏显示小车运行的里程和时速以及运行时间。
以红外传感器对路面黑线检测用,行驶距离使用对射光电传感器加以码盘进行检测,通过红外传感器进行壁障处理。
通过障碍探测模块,采用二只红外传感器分置于小车两边,对小车与障碍物相对距离和方位能作出较为准确的判别和及时反应。
采用多只方向性较强的光敏二极管作光源定位器,在寻找光源时根据每个定位器接收到的光线强弱(有无)得出实时车库方位。
关键词:STM32F103RB 光电传感器L298N控制电动机光敏二极管障碍探测模块TFT彩屏AbstractThis system is mainly based on a chip called STC12C5A60S2. This intelligent car designed by us three can run automatically through black lines on the ground. KEY WORDS:single-chip microcomputer control systemphotosensitive diode L298nObstacle detection module设计任务与要求一、任务设计并制作一个简易智能电动车,其行驶路线示意图如下:二、要求1、基本要求(1)电动车从起跑线出发(车体不得超过起跑线),沿引导线到达B点。
在“直道区”铺设的白纸下沿引导线埋有1~3块宽度为15cm、长度不等的薄铁片。
电动车检测到薄铁片时需立即发出声光指示信息,并实时存储、显示在“直道区”检测到的薄铁片数目。
(2)电动车到达B点以后进入“弯道区”,沿圆弧引导线到达C点(也可脱离圆弧引导线到达C 点)。
C点下埋有边长为15cm的正方形薄铁片,要求电动车到达C点检测到薄铁片后在C 点处停车5秒,停车期间发出断续的声光信息。
(3)电动车在光源的引导下,通过障碍区进入停车区并到达车库。
电动车必须在两个障碍物之间通过且不得与其接触。
(4)电动车完成上述任务后应立即停车,但全程行驶时间不能大于90秒,行驶时间达到90秒时必须立即自动停车。
2、发挥部分(1)电动车在“直道区”行驶过程中,存储并显示每个薄铁片(中心线)至起跑线间的距离。
(2)电动车进入停车区域后,能进一步准确驶入车库中,要求电动车的车身完全进入车库。
(3)停车后,能准确显示电动车全程行驶时间。
(4)其它。
一、方案论证与比较根据题目要求,我们分一下几个部分进行方案设计及比较论证。
1.电机驱动调速模块方案一:采用电阻网络或数字电位器调整电动机的分压,从而达到调速的目的。
但是电阻络只能实现有级调速,而数字电阻的元器件价格昂贵。
更主要的问题在于一般电动机的电阻较小,但电流很大;分压不仅会降低效率,而且很难实现。
方案二:采用普通L298N来控制电机的正转和反转来实现小车的前进和后退,并用单片机进行软件调速,缺点是单片机容易受L298N的电源影响,系统变得不安全。
方案三:采用带光耦隔离的L298N来控制电机的正转和反转来实现小车的前进和后退。
通过STC12C5A60S2内部的集成PWM定时器,实现整车的加速与减速,精确小车的速度。
好处是保护控制控制端不受电机的影响,使得系统安全可靠,避免单片机烧坏。
基于上述理论分析,拟选择方案四。
2.路面黑带检测模块黑带检测的原理是:红外光线照射到路面并反射,由于黑带和白纸的系数不同,可根据接的红外线的强弱判断是否到达黑带。
方案一:可见光发光二极管与光敏二极管组成的发射—接收电路。
这种方案的缺点在于其他环境光源会对光敏二极管的工作产生很大的干扰,一旦外界光亮条件改变,很可能造成误判和漏判;虽然产生超高亮发光二极管可以降低一定的干扰,但这又将增加额外的功率损耗。
方案二:反射式的红外发射—接收器。
由于采用红外管代替普通可见光管,并经过反相斯密特触发器之后送入单片机,可以降低环境干扰。
基于上述理论分析,拟选择方案二。
3.路面黑带检测模块方案一:8个使用数码管动态扫描的方式,分别显示时间和路程,缺点是功耗较大,并且只能显示数字和少量的字母,不适合人的观察。
方案二:TFT彩彩屏有功耗低、体积小、重量轻等特点,方便放置于小车上,能满足显示的要求。
基于上述理论分析,拟选择方案二。
4. 电源选择方案一:所有器件采用单电源供电,这样供电电路比较简单;但是由于电动机启动瞬时电流很大,会造成电压不稳,干扰严重,缺点十分明显。
方案二:双电源供电,将电动机驱动电源与单片机以及周边电路电源完全隔离,这样做虽然不如单电源方便灵活,但可以将电动机驱动所造成的干扰彻底消除,提高了系统的稳定性。
基于上述理论分析,拟选择方案二。
5. 控制单元模块方案一:采用纯数字电路该方案外部检测采用光电转换,系统控制部分采用数字电路译码对小车电动机两端电压调整,来控制小车的运行。
时间和行程用加法器进行计数。
此系统的设计将会使电路过于复杂,调试时需要改变硬件电路,机动性差。
方案二:用单片机控制用光电检测不同的信号,并经单片机对其处理,传送给L298信号,使其控制电机的正转和反转,配合PWM程序控制,来实现加速减速和刹车。
通过单片机内部定数器/计数器进行定时、计数,在用单片机串行输入/输出口进行显示控制。
此方案电路成熟、工作稳定、容易实现控制。
为能更好的实现题目的各种设计要求,所以我们选用第二种方案。
用单片机进行控制。
6.障碍探测模块:考虑到在测障过程中小车车速及反应调向速度的限制,小车应在距障碍物40CM的范围内做出反应,这样在顺利绕过障碍物的同时还为下一步驶入车库寻找到最佳的位置和方向。
否则,如果范围太大,则可能产生障碍物的判断失误;范围过小又很容易造成车身撞上障碍物或虽绕过障碍物却无法实现理想定向方案。
方案一、采用一只红外传感器置于小车中央。
一只红外传感器小车中央安装简易,也可以检测到障碍物的存在,但难以确定小车在水平方向上是否会与障碍物相撞,也不易让小车做出精确的转向反应。
方案二、采用二只红外传感器分置于小车两边。
二只红外传感器分别置于小车的前端两侧,方向与小车前进方向平行,对小车与障碍物相对距离和方位能作出较为准确的判别和及时反应。
智能小车应以准确、智能见优,采用方案二。
7.寻找光源方案:方案一、采用多只方向性较强的光敏二极管作光源定位器。
若干定位器在水平面上按不同角度展开,在寻找光源时根据每个定位器接收到的光线强弱(有无)得出实时车库方位。
方案二、采用一个光源定位器。
用深色不透光材料与光敏电阻制成的光源定位器有较理想的定向测试效果,2.5米之外就可以确定电源的方向。
当小车绕过障碍物之后,通过不停地旋转使定位器获得最大光线照射以确定光源方向,这种方案有一定的可行性,但寻找光源的过程必定带来不必要的大量时间开销,且寻找过程盲目性太大,不利于控制,又增加了一个电机,增大的电源方案选择或安装的难度。
综合考虑以上方案,方案一更具准确性和独创性,故我们采用方案一。
8.铁片检测模块:方案一、使用探测线圈和探测仪构成的金属探测器。
此类金属探测器利用探测线圈产生的交变磁场在接近金属材料时产生微弱变化这一原理,将变化信号放大处理进而实现探测金属的目的。
由于该探测器结构复杂,在短期内不可能完成制作,为节省时间,我们放弃了该方案。
方案二、使用电感式接近开关代替金属探测器。
电感式接近开关本身就是理想的传感器。
当金属物体接近开关的感应区域,开关就能无接触,无压力、无火花、迅速作出反应。
用它作为本次小车的金属传感器,简单易行、准确且抗干扰性能优越。
本系统中采用方案二。
二、系统实现方框图与主要参数设计。
1.总体设计方案描述总体设计方案的硬件部分详细框图如下:STM32F103RB 红外检线模块 TFT 彩屏显示模声光模块 PWM 电机驱动模块电机光源检测模块铁片检测模块 防撞 检测模块红外光电测速模2.硬件电路设计1. STC12C5A60S2单片机最小系统此系统以STC12C5A60S2为核心,最小系统如图所示:2. 黑线检测部分:我们采用两个反射式光电检测电路对跑道上的黑线进行检测,并使用六反相斯密特触发器输出高低电平信号,这样可以消除外界光线的干扰,单片机同时检测到两个光电传感器输出由高到低的电平跳变时,这为黑线,硬件如图所示:3.光电测速部分:采用对射光电传感器,通过对电机上的码盘线计数,产生下降沿,通过LM393电压比较器输出高低电平,这能有效克服环境干扰。
每50ms计算一次,按照公式:瞬时速度=下降沿个数÷电机减速比÷码盘线数×车轮周长;总路程=∑(每50ms路程);由此可以计算出路程和速度。
硬件图如下:4.显示模块采用LCD1602显示模块,硬件连接如下图:5. L298N电动机驱动模块部分该电路采用电动机驱动芯片L298来控制电动机的正转与反转,加以第二路电机电源保证了电动机启动时有足够的电流。
在试验中控制电压为单片机输出的高低电平直接控制。
具体电路图连接如下:6.电源部分考虑到L298N输出的压降,故使用2节3.6V18650可充电电池给电机供电。
而单片机也用2节3.6V18650可充电电池,并使用1117 5v稳压芯片给单片机供电。
7.障碍探测部分:在电路设计中可以再输出端黄线加上拉电阻10K到5V,再接入单片机检测,会比较稳定,如果采用随机检测可以采用单片机的外部硬件中断INT0 INT1等来实现。
8.光源检测部分(光敏二极管作光源定位器):若干定位器在水平面上按不同角度展开,在寻找光源时根据每个定位器接收到的光线强弱(有无)得出实时车库方位。
可以检测周围环境的亮度和光强(与光敏电阻比较,方向性比较好,可以感知固定方向的光源)。
模块在无光条件或者光强达不到设定阈值时,DO 口输出高电平,当外界环境光强超过设定阈值时,模块D0输出低电平;小板数字量输出D0可以与单片机直接相连,通过单片机来检测高低电平,由此来检测环境的光强改变;9.铁片检测部分:电感式接近开关本身就是理想的传感器。
当金属物体接近开关的感应区域,开关就能无接触,无压力、无火花、迅速作出反应。
用它作为本次小车的金属传感器,简单易行、准确且抗干扰性能优越。
3.系统的软件设计软件设计流程图如下:1.定时器控制倒计时的软件控制:所有倒计时,计时都通过计时器0中断控制,根据RAM单元中相应的控制位选择不同的工作。