基于MSP430的车载雷达测速测距系统
- 格式:pdf
- 大小:317.75 KB
- 文档页数:4

摘要本设计的内容是基于单片机MSP430的超声波测距系统。
主要是利用超声波的特点,将超声波测距系统与MSP430单片机结合起来,设计出测距报警系统。
当超声波传感器与障碍物的距离小于所设定的安全距离时,系统能发出声光警报,并随着距离的不断接近,报警频率不断提高。
与此同时还在液晶上显示出当前距离以及安全距离。
工作时超声波发射器发出超声波脉冲,超声波接收器接受到遇到障碍物反射回来的反射波,然后准确的测量超声波从发射到遇到障碍物反射返回的这段时间,根据超声波的传播速度,计算出到障碍物的距离。
本设计采用软、硬件结合的方法,并在Proteus中进行了系统仿真。
关键词:MSP430 超声波测距Abstract The content of this design is the ultrasonic ranging system based on single-chip 忽略puter MSP430. Mainly using the characteristics of ultrasonic 忽略bined ultrasonic ranging system with MSP430 single chip micro忽略puter, design range alarm system. When the ultrasonic sensors and obstacle distance is less than the safe distance set, the system can send out sound and light alarm, and with the close distance, alarm frequency increasing. At the same time also on the LCD shows the current distance and a safe distance. Work issue ultrasonic pulse ultrasonic emitter, ultrasonic receivers accept reflected the reflection to encounter obstacles, and then the accurate measurement of ultrasonic from launch to detect obstacles to reflect back to this period of time, according to the ultrasonic wave propagationvelocity, calculate the distance to the obstacles.This design adopts the method of bining software and hardware, and has carried on the system in the Proteus simulation.Keywords: Microcontroller MSP430 Ultrasonic Ranging目录前言 (1)第1章系统总体方案与框架 (2)1.1 设计整体思路与基本原理 (2)1.2 系统总体概述 (2)第2 章实现系统硬件设计 (4)2.1 主控模块 (4)2.2 超声波测距模块 (4)2.3 LCD显示模块 (6)2.4 声光报警模块 (10)2.5 系统参数调整模块 (10)第3 章系统软件设计 (11)3.1 运行方式控制程序流程设计 (11)第4 章电路调试及性能分析 (13)4.1 电路的调试 (13)4.1.1电源的选择 (13)4.1.2 蜂鸣器 (14)4.2 测试及结果分析 (14)结论 (15)致谢 (17)参考文献 (18)附件 (19)前言随着社会经济的迅速发展,人们生活水平不断提高,越来越多的人都拥有自己的汽车。

本科自主创新设计题目: 基于MSP430_launchpad超声波测距系统姓名孙尚威学院电子工程学院专业电子信息科学与技术班级2013211202学号2013210849班内序号04指导教师赵同刚2015年5月目录第1章绪论 (3)1.1项目简介 (3)1.2项目功能目标 (3)第2章超声波测距原理 (3)2.1超声波简介 (3)2.2超声波测距原理 (4)第3章方案论证 (4)3.1设计思路 (4)3.2硬件系统结构设计 (4)第4章主要元件介绍 (5)4.1单片机MSP430 LAUNCHPAD M430G2553 (5)4.2超声波传感器HC-SR04 (6)4.35110LCD液晶显示屏 (6)第5章软件设计 (7)5.1主程序流程 (7)5.2子程序设计 (8)5.2.1 超声波发送子程序及超声波接收中断子程序 (8)5.2.2 距离计算子程序 (8)5.2.3 液晶显示程序 (9)第6章系统调试及误差分析 (10)6.1系统焊接 (10)6.2误差及特性分析 (10)附录一:主要程序 (12)第1章绪论1.1 项目简介本设计介绍了基于单片机控制的超声测距仪的原理:由MSP430单片机控制定时器产生超声波脉冲并计时,计算超声波自发射至接收的往返时间,从而得到实测距离。
用四位LCD液晶屏显示距离。
整个硬件电路由超声波发射模块、超声波接收模块、单片机控制模块、显示模块组成。
在此基础上设计了系统的总体方案,最后通过硬件和软件实现了各个功能模块。
相关部分附有硬件电路图、程序流程图,给出了系统构成、电路原理及程序设计。
此系统具有易控制、可读性强和流程清晰等优点。
但稳定性有待提高,后续有待实现显示数据实时刷新的功能1.2 项目功能目标采用单片机作为主控制器,可实现低成本、高精度、微型化测距系统。
实现50cm-300cm的基本指标的障碍物距离测试,能够实现障碍物距离的实时显示,精确到厘米。
当被测距离小于预设报警值是,红灯亮起,提示距离过近。

基于MSP430单片机的测速系统设计金华;于瑞华【期刊名称】《微计算机信息》【年(卷),期】2012(000)003【摘要】本文论述了MSP430F149低功耗单片机TIMER_B捕获方式的工作原理。
并利用MSP430F149单片机捕获方式和红外对管传感器设计了速度测量系统,同时给出了精度计算方法和误差分析。
该系统具有精度高、功耗低、体积小、抗干扰等特点,可应用于子弹出膛速度测量,飞轮转速测量和其它需要精确测速的工业控制领域。
%The working principle of TIMER_B capture mode in MSP430F149 MCU was discussed. And a kind of speed measurement system was designed based on the TIMER_B capture mode and infrared twinborn LED. We calculated the precision and analysed the bounds of error. This system was provided with high precision and low power which could be applied to measure the flying bullet speed, the fly wheel speed and other region with high precise speed measurement.【总页数】2页(P14-15)【作者】金华;于瑞华【作者单位】中国人民公安大学安全防范系,北京102614;中国人民公安大学安全防范系,北京102614【正文语种】中文【中图分类】TP368【相关文献】1.基于MSP430单片机的直流电动机调速测速控制系统 [J], 宋强2.基于光纤传感器与MSP430单片机的动力陀螺测速技术研究 [J], 康宁;王绪安;冯一;蔡睿洁3.基于MSP430的动感单车测速系统设计 [J], 崔焕;程洋;丁元梦4.基于MSP430单片机的测速装置设计 [J], 李盘文;张玉琴5.基于MSP430单片机的超声波倒车雷达系统设计 [J], 陈希湘;朱嵘涛;王锦莉因版权原因,仅展示原文概要,查看原文内容请购买。

基于MSP430单片机的倒车雷达设计
超声波雷达又称泊车辅助系统,是一种利用超声波原理,由装载于车尾保
险杠上的探头发送超生波撞击障碍物后,反射此声波探头,从而计算出车体与障碍物之间的距离。
倒车雷达主要由三部分组成:
感应器(探头),主机,显示设备。
感应器发出和接收超声波信号,然后将
得到的信号传输到主机里面的电脑进行分析,再通过显示设备显示出来。
随着
人们对汽车驾驶辅助系统易用性要求的提高,以及单片机价格不断下降和汽车
电子系统网络化发展的要求,新型的倒车雷达都是以单片机为核心的智能测距
传感系统。
本文介绍了一种基于MSP430 单片机的超声波倒车雷达监测报警系统。
1 系统的硬件设计
本倒车雷达主要用来显示汽车后面的情景,测量和障碍物之间的距离。
整个
设计主要由MSP430 单片机、超声波发生模块、超声波接受模块、视频采集模块、LCD 显示模块以及语音报警模块组成。
单片机外围扩展一系列功能模块如LCD、USB 接口等,USB 主机接口连接摄像头模块采集视频图像信息系统,结合ARM 处理器实现视频/图像的采集、压缩,并将采集后的数据发送到接收端,并通过LCD 显示出来。
1.1 倒车雷达总体结构
倒车雷达的设计由五部分组成:超声波发生模块、超声波接受模块、摄像头
视频采集系统、LCD 显示模块、语音报警系统,其总体体系结构见图1.1.
图1.1 系统的总体设计
各模块完成的具体任务如下:
1.1.1 测距系统:由超声波发生模块、超声波接受模块、单片机控制系统组。



基于MSP430车辆定位系统的设计汪正进;朱代先;常坤;史恩;李斯【摘要】对车辆进行准确的定位和追踪是汽车业今后发展的一种趋势。
此系统设计是基于MSP430基础上研究如何对车辆进行实时定位和追踪。
系统的车载终端由液晶模块、GSM模块、GPS模块、无线模块、电机驱动模块以及电机等组成,控制中心由微控制器组成。
利用GPS模块采集地理位置等信息,通过液晶12864实时显示经纬度、速度、时间等数据,再通过GSM网络将采集的信息发送到控制中心。
控制中心通过USB端口读取GSM模块收到的信息,通过调用浏览器,将车辆所在位置的地理位置和运动轨迹通过经纬度坐标等信息实时显示出来。
%Locating and tracking accuracy of the vehicle is a trend in the future development of the automotive industry. This system design is based on the MSP430 based on the research of how to vehicle real-time positioning and tracking. The vehicle terminal system is composed of liquid crystal module, GSM module, GPS module, wireless module, motor driver module, motor and other components, the control center is composed of a micro controller. Using the GPS module acquisition geographic location information, real-time display by LCD 12864 longitude and latitude, speed, time and other data. And then through the GSM network will be sent to the control center of information acquisition. The control center GSM module to read the information received via the USB port,by calling the browser, the vehicle location location and track by latitude and longitude coordinates information real-time display.【期刊名称】《无线互联科技》【年(卷),期】2015(000)002【总页数】3页(P29-31)【关键词】GSM;GPS;无线;车辆定位;电机驱动【作者】汪正进;朱代先;常坤;史恩;李斯【作者单位】西安科技大学通信学院,陕西西安710054;西安科技大学通信学院,陕西西安 710054;西安科技大学通信学院,陕西西安 710054;西安科技大学通信学院,陕西西安 710054;西安科技大学通信学院,陕西西安 710054【正文语种】中文随着城市工业化的快速发展和城市道路的扩张,汽车已成为人们日常生活中不可缺少的一部分。


基于MSP430单片机距离保护系统的设计摘要:本文介绍了一种基于MSP430单片机的距离保护系统设计。
该系统可以有效地检测并显示周围环境中的障碍物距离,并及时发出警报声以提醒驾驶员注意安全。
系统的实现采用了超声波传感器和MSP430单片机进行数据采集和处理。
实验结果表明,该系统具有高灵敏度、准确性和稳定性,能够满足距离保护的相关要求。
关键词:MSP430单片机;距离保护;超声波传感器;警报声;安全一、介绍目前,汽车行业对距离保护系统的需求越来越高。
距离保护系统可以在行驶中帮助驾驶员监测道路上的障碍物和其他车辆,提高驾驶的安全性和稳定性。
超声波传感器是距离保护系统的一种常用传感器,可以通过发射和接收超声波信号来测量障碍物距离。
MSP430单片机是一种微控制器,具有低功耗、高性能和丰富的外设接口,可以用于智能控制、数据采集和处理等方面。
在本文中,我们将介绍一种基于MSP430单片机的距离保护系统设计。
该系统可以通过超声波传感器检测周围环境中的障碍物距离,并将数据显示在液晶屏上。
同时,系统还可以发出警报声以提醒驾驶员注意安全。
本文的结构如下:第二部分介绍系统的设计原理和实现方法;第三部分是实验结果和分析;第四部分是总结和展望。
二、设计及规划该系统主要由MSP430单片机、超声波传感器、液晶屏和蜂鸣器等组成。
为了实现障碍物距离的测量和显示,本系统采用了一种超声波传感器。
超声波传感器可以通过发射超声波信号,并测量反弹回来的信号,计算出障碍物与传感器的距离。
具体来说,传感器将高频信号转换成超声波信号,经过一段时间后,反射回来的信号被传感器转换成电信号,并由MSP430单片机进行采集和处理。
MSP430单片机通过测量发送和接收信号之间的时间差来计算障碍物与传感器的距离。
图2显示了超声波传感器测量距离的原理。
本系统使用MSP430单片机进行数据采集和处理。
MSP430单片机具有低功耗、高性能和丰富的外设接口,可以用于智能控制、数据采集和处理等方面。
基于MSP430单片机的倒车雷达设计摘要随着我国汽车产业的告诉发展,尤其是近两三年我国开始进入私家车时代,汽车电子产业成了新的增长点,汽车电子产品的高利润和市场广阔性备受商家关注,印象和防盗器就是明证。
近两年来,倒车雷达成了商家的电子新爱,众多生产防盗器的厂家纷纷涉足倒车雷达。
倒车雷达全称为“倒车防撞雷达”,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和启动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除视野的死角和视线模糊的缺陷。
本文详细介绍了一种基于MSP430单片机的超声波脉冲测距预警倒车雷达系统。
该系统以空气中超声波的传播速度为确定条件,利用反射超声波测量待测距离。
并且描述了系统研制的理论基础,超声波传感器等部分的电路设计以及使用了性能优良的单片机对系统起到了积极的作用。
论文概述了超声波检测的发展及原理,介绍了超声波传感器的原理以及特性,并且在在此基础上提出了系统的总体构成。
针对测距系统发射、接受、检测、多路控制、显示部分的总体设计方案进行了论证。
关键词:倒车雷达;MSP430单片机;超声波测距。
The Design of Car Parking Sensor Based on MSP430 ChipAbstractWith the development of China's automobile industry to tell, especially in the past two or three years entered the private car of the era, automotive electronics industry has become a new growth point, automobile electronic products and market a broad high-margin business of much attention, impressions, and anti-theft device is proof. The past two years, reversing radar became the new love of electronic business, many manufacturers have produced anti-theft device involved reversing radar.Parking sensor is called "reverse collision avoidance radar," is secure car parking assist device, capable of voice or a more intuitive display of obstacles around the situation told the driver to lift the driver start the vehicle parking and access around, problems arising and to help the driver dead livestock and blurred vision defects.This paper describes the MSP430 microcontroller based ultrasonic pulse ranging reversing early-warning radar system. The system is the propagation velocity of ultrasonic wave in the air to determine the conditions under test using reflected ultrasonic distance measurement. And describes the theoretical basis of system development, ultrasonic sensors and other parts of the circuit design and the use of the excellent performance of the SCM system has played a positive role.Paper outlines the development of ultrasonic testing and the principle, introduced the principle and the characteristics of ultrasonic sensors, and on this basis, the overall composition of the proposed system. Ranging system for launch, receive, test, multiple control, showing part of the overall design were demonstrated.Keywords :reversing radar; MSP430 microcontroller; Ultrasonic Ranging目录摘要 (1)Abstract (2)目录 (3)1. 绪论 (1)1.1 引言 (1)1.2 课题背景及意义 (1)1.3 国内外倒车雷达的发展现状 (2)1.4 倒车雷达的发展趋势 (3)1.5 论文主要研究内容 (4)2. 倒车雷达的相关技术 (5)2.1 超声波介绍 (5)2.2 超声波传感器 (6)2.2.1 超声波传感器结构 (6)2.2.2 工作程式 (8)2.2.3 系统构成 (8)2.3 系统测距原理 (9)3. 系统的硬件设计 (11)3.1 硬件结构 (11)3.2 MSP430单片机 (11)3.3 系统的硬件电路设计 (12)3.3.1 主控制器选择及硬件组成 (12)3.3.2 电源电路 (12)3.3.3 复位电路 (13)3.3.4 时钟电路 (14)3.3.5 存储器电路设计 (15)3.4 超声波换能器电路设计 (16)3.4.1 倒车雷达总体结构 (16)3.4.2 超声波发射信号 (16)3.4.3 超声波接收电路 (17)3.4.4 显示电路与报警提示设计 (18)3.4.5 MSP430单片机介绍 (19)4. 系统软件设计 (21)4.1 软件设计总体思路 (21)4.1.1 总体思路 (21)4.1.2 需要完成的任务 (22)4.2 图像视频的采集与播放 (22)4.2.1 USB摄像头的组成 (22)4.2.2 LCD显示的程序设计 (23)4.3 超声波发射和接受部分软件 (25)5. 总结 (29)参考文献 (32)致谢 (34)1. 绪论1.1 引言超声波雷达又称泊车辅助系统,是一种利用超声波原理,由装载于车尾保险杠上的探头发送超生波撞击障碍物后,反射此声波探头,从而计算出车体与障碍物之间的距离。
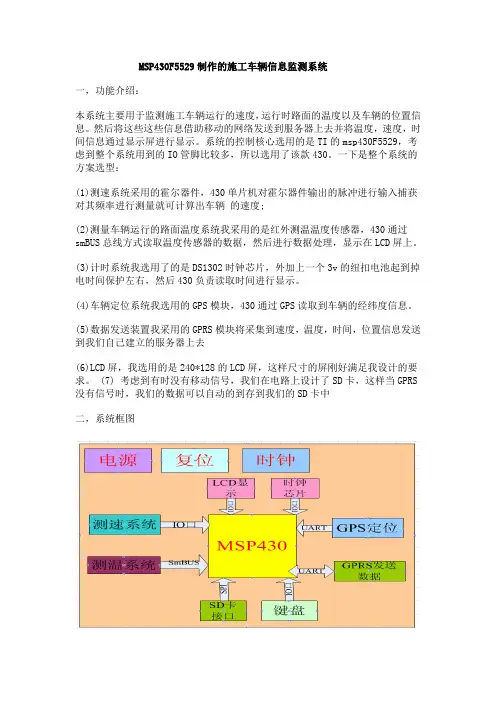
MSP430F5529制作的施工车辆信息监测系统一,功能介绍:本系统主要用于监测施工车辆运行的速度,运行时路面的温度以及车辆的位置信息。
然后将这些这些信息借助移动的网络发送到服务器上去并将温度,速度,时间信息通过显示屏进行显示。
系统的控制核心选用的是TI的msp430F5529,考虑到整个系统用到的IO管脚比较多,所以选用了该款430。
一下是整个系统的方案选型:(1)测速系统采用的霍尔器件,430单片机对霍尔器件输出的脉冲进行输入捕获对其频率进行测量就可计算出车辆的速度;(2)测量车辆运行的路面温度系统我采用的是红外测温温度传感器,430通过smBUS总线方式读取温度传感器的数据,然后进行数据处理,显示在LCD屏上。
(3)计时系统我选用了的是DS1302时钟芯片,外加上一个3v的纽扣电池起到掉电时间保护左右,然后430负责读取时间进行显示。
(4)车辆定位系统我选用的GPS模块,430通过GPS读取到车辆的经纬度信息。
(5)数据发送装置我采用的GPRS模块将采集到速度,温度,时间,位置信息发送到我们自己建立的服务器上去(6)LCD屏,我选用的是240*128的LCD屏,这样尺寸的屏刚好满足我设计的要求。
(7) 考虑到有时没有移动信号,我们在电路上设计了SD卡,这样当GPRS 没有信号时,我们的数据可以自动的到存到我们的SD卡中二,系统框图上图就是我整个设计的框图。
(1)电源给整个系统供电,输入12v通过两种稳压芯片,分别稳压到5v和3.3v 给整个系统供电。
(2)测速,键盘, LCD我采用的都是IO进行和430单片机进行连接(3)GPS和GPRS采用的是UART和430进行连接(4) SD卡采用的是SPI接口和430进行连接三,系统原理图图2 电源图3 LCD和时钟芯片图4 430核心部分整个系统的原理图如图2,3,4所示。
图2是整个系统的电源部分,图3是lcd 显示屏,图4是整个430核心部分。
基于MSP430行驶车辆检测器方案设计
利用环形线圈、MSP430F1121A 单片机与输出接口,组成低功耗行驶车辆检测系统,并能根据用户预先设定的灵敏度、工作方式、输出方式进行车辆检测与信号输出。
还应用软件动态刷新基准的方法提高了检测的可靠性和准确性。
实验表明:该系统具有结构简单、功耗低、调节方便等优点。
引言
近年来,车辆检测器作为交通信息采集的重要前端部分,越来越受到业内人士的关注。
鉴于公路交通现代化管理和城市交通现代化管理的发展需要,对于行驶车辆的动态检测技术车辆检测器的研制在国内外均已引起较大重视。
车辆检测器以机动车辆为检测目标,检测车辆的通过或存在状况,其作用是为智能交通控制系统提供足够的信息以便进行最优的控制。
目前,常用的行驶车辆检测器主要有磁感应式检测器,超声波式检测器,压力开关检测器,雷达检测器,光电检测器以及视频检测器等,而环形线圈电磁感应式车辆检测器具有性能稳定、结构简单、检测电路易于实现、成本低、维护量少、适应面广等优点,市场应用范围最广。
目前我国实际用于高速公路和城市道路的车辆检测器几乎全部是从国外进口的,国产车辆检测器存在着诸多问题,如误检率高、灵敏度低、长时间工作稳定性差等。
在大量现场实验基础上,本文提出一种新的解决方案,将稳定性、灵敏性、高速性融为一体,解决了以上所述的诸多问题。
1 工作原理
本系统采用MSP430F1121A 单片机与环形线圈相结合的方法对行驶车辆进行检测,是一种基于电磁感应原理的检测器。
传感器线圈为通过有一定电流的。
一种基于MSP430单片机的超声波测距系统的设计与实现超声波测距系统是一种广泛应用于自动控制领域中的传感器技术。
它采用超声波传感器可以获得距离测量值,被广泛应用于机器人、智能家居、自动驾驶等众多领域中。
本文主要介绍一种基于MSP430单片机的超声波测距系统的设计与实现。
该系统主要分为超声波发射模块和接收模块两部分。
超声波发射模块主要功能是产生超声波脉冲。
该模块采用MSP430单片机作为主控制器,通过GPIO口控制超声波发射传感器的工作方式。
具体实现中,将MSP430单片机上的GPIO口配置为输出模式,并设置输出脉冲的周期和占空比。
然后使用定时器产生脉冲信号,输出到超声波发射器上。
超声波接收模块主要功能是接收所发出的超声波脉冲,并计算出物体与传感器之间的距离。
该模块采用超声波接收传感器来接收超声波信号,并将信号经过前置放大器进行放大,提高信号的精度和灵敏度。
然后将信号输出到MSP430单片机上进行次数测量和计算距离值。
具体实现中,超声波接收模块的硬件部分包括超声波接收传感器、前置放大器和A/D转换器。
其中,超声波接收传感器通过GPIO口与MSP430单片机连接,前置放大器将信号放大后输出到A/D转换器,MSP430单片机通过A/D转换器采集数据并进行处理。
软件部分分为超声波发射程序和超声波接收程序两部分。
超声波发射程序主要负责控制超声波发射器的工作,超声波接收程序主要用于接收超声波信号,进行次数统计和距离计算,最后通过串口输出距离测量值。
在完成硬件与软件的设计之后,进行系统测试。
测试中需要使用标准距离参照物,通过与标准距离参照物比对,对测量系统进行校准。
测试结果表明,该系统测量范围达到3-400cm,并且测量精度高,稳定性强。
本文介绍的基于MSP430单片机的超声波测距系统,具有简单、灵活、精度高等优点。
将来可以进一步应用于物流领域、智能家居、机器人等领域,发挥更广泛的作用。
基于MSP430的倒车雷达的设计随着人们对汽车辅助驾驶系统智能化要求的提高和汽车电子系统的网络化发展,新型的倒车雷达应能够连续测距并显示障碍物距离,并具有通信功能,能够把数据发送到汽车总线上去。
以往的倒车雷达设计使用的元器件较多,功能也较简单。
本文介绍的基于新型高性能超低功耗单片机MSP430F2274 的倒车雷达可以弥补以往产品的不足。
系统总体设计系统采用超声波测距原理。
超声波测距仪器一般由发射器、接收器和信号处理器三部分组成。
工作时,超声波发射器发出超声波脉冲,超声波接收器接收遇到障碍物反射回来的反射波,准确测量超声波从发射到遇到障碍物反射返回的时间,根据超声波的传播速度,可以计算出障碍物距离。
作为一种非接触式的检测方式,超声波具有空气传播衰减小、反射能力和穿透性强的特点。
超声波测距具有在近距离范围内有不受光线和雨雪雾的影响、结构简单、制作方便和成本低等优点。
高性能的单片机结合超声波测距,可以实现功能强大、使用方便的倒车雷达。
TI 公司的16 位单片机MSP430F2274 功耗极低,片上资源丰富,同时利用JTAG 接口技术,可以对片上闪存方便的编程,便于软件的升级,非常适合作为倒车雷达系统的微控制器。
倒车雷达系统的框图如图1 所示。
图1 倒车雷达系统框图硬件系统设计系统以MSP430F2274 微控制器为核心,外围电路由超声波发射电路、超声波接收电路、声光报警电路、通信接口电路、键盘液晶显示电路五部分组成,下面逐一介绍。
图2 倒车雷达系统主控电路图系统的主控电路图如图2 所示。
本系统中选用的MSP430F2274 片内有32Kb 闪存和1Kb RAM,因此无须外扩存储器。
外接的32.768kHz 晶振作为CPU 关闭状态Basic-Timer 的时钟源,同时也作为系统的车载时钟使用。
tips:感谢大家的阅读,本文由我司收集整编。
仅供参阅!。
基于MSP430单片机的超声波倒车雷达监测报警系统设计前言据初步调查统计,75%的汽车交通事故是由汽车倒车“后视”小良造成的。
因此,许多非职业汽车驾驶员很希望能有一种汽车倒车报警器,在倒车时不断测量汽车尾部与其后面障碍物的距离,并随时显示其距离,在不同的距离范围内发出不同的报警信号,以提高汽车倒车时的安伞性。
增强汽车的后视能力,尤其是增强大型、重型车辆的后视能力,对于提高行车安全,减轻司机的劳动强度和心理压力,是十分重要的。
目前,国内外都在研究如何利用先进的技术,即汽车避撞技术,辅助汽车驾驶者对影响公路交通安全的人、车、路环境进行实时监控,在危急情况下由系统主动干涉驾驶操纵、辅助驾驶者进行麻急处理、防I卜汽车碰撞事故的发生。
随着人们对汽车驾驶辅助系统易用性要求的提高,以及单片机价格小断下降和汽车电子系统网络化发展的要求,新型的倒车雷达都是以单片机为核心的智能测距传感系统。
本文介绍了一种基于MSP430单片机的超声波倒车雷达监测报警系统。
1 系统测距原理超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在窄气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时,超声波在空气中传播的速度为340m/S,根据计时时间t,就可以计算出发射点距障碍物的距离S,即S=340&TImes;t/2 (1)这就是时间差测距法。
本系统就是利用单片机控制超声波发射器发射超卢波脉冲,同时利用单片机中的计数器开始计时。
超声波达到后面的障碍物就会反射回来,接收装氍接收到回波信号后由外部比较电路产生高电平使单片机产生外部中断。
单片机运行中断服务子程序(ISR)计算出距离,并传送给LCD显示给司机,同时程序内还有比较模块,若车距小于5 m,则显示所测量的距离的同时单片机输出一个高电平使蜂鸣器报警,若车距大于5m,则显示U。
U,蜂鸣器不报警,这样以声光两种方式可靠地向司机给出报警信息,来保证倒车或行车的安全。
一种基于MSP430单片机的超声波测距系统的设计与实现作者:董家靖来源:《数字技术与应用》2014年第03期摘要:根据在空气中超声波传播速度固定的特点,通过记录单片机中计数器数值来计算超声波的传播时间,时间与速度相乘得到距离值为原理,设计了一种由MSP430F1101单片机控制的超声波测距系统,系统具有易实现、实时性、可靠性和适应性好等特点。
关键词:超声波测距 MSP430单片机中图分类号:TP274.53 文献标识码:A 文章编号:1007-9416(2014)03-0118-02在人们日常生产生活当中,诸多场合需要自动进行非接触测距,如汽车倒车、水库液位测量等。
与光波相比,超声波的传播速度要小很多,所以即使在传播距离较短的条件下,传播时间也可以被准确的检测出来。
而且超声波的方向性很好,因此人类研究以超声波为“工具”来实现测距。
超声波测距利用了声波的传播特性,结合了光电开关、电子计数等硬件结构实现距离测量的目的,并且是一种非接触式的测量方法。
本文介绍了一种基于MSP430F1101单片机的超声波测距系统[1]。
1 超声波测距原理超声波[2]与光波不同,其本质是可以在空气、液体、固体中进行传播的弹性机械波。
由于超声波的传播速度仅为340m/s,与光波速度相比已经很慢,所以即使在较短的距离范围内准确记录其传播时间也是可以实现的。
以超声波来实现测距目的的方法也有往返时间检测法、相位检测法、声波幅值检测法[3]等很多种。
本文采用往返时间检测法。
其原理是超声波发射器发射出一定频率的、在空气介质中传播的超声波脉冲,当其遇到障碍物时产生反射,由接收装置接收,其所经历的时间就是往返时间,时间长短与超声波传播的路程的有关。
测试传输时间就可以得出距离,即S=340×t/2 (1)当测得的距离S小于某个固定值时,触发报警装置产生报警。
2 系统总体设计方案本系统以MSP430F1101单片机为核心,包括超声波发射、回波信号接收、显示和报警、电源等硬件电路部分以及相应的软件部分构成。
基于MPS430单片机实现24G雷达车速反馈标志牌的设计摘要:本文在此主要研究了测速雷达传感器的工作原理并提出了一种利用MPS430单片机编程技术、测速雷达传感器信号处理技术及户外大型LED驱动显示技术实现的车速反馈标志牌的硬件电路和软件编程的设计方案。
关键词:MPS430单片机雷达测速LED标志牌1 引言随着城市化进展的加快及汽车普及率的提高,交通事故发生率也急剧提高。
据统计分析,交通事故的发生,很大部分是由于车辆行驶超速造成的。
由于驾驶员在驾驶过程中并没有时刻关注时速表,经常出现超速驾驶而自己却并不知情的情况。
通过设置在道路一侧的雷达车速反馈标志牌,实时向路面发射出雷达测速信号,并对返回的信号进行测量运算,即可实现对车辆行驶速度的测量和显示,达到提醒司机注意安全驾驶的目的。
本文主要针对该雷达车速反馈标志牌系统的功能结构进行分析,并深入研究了测速雷达传感器的工作原理,最后提出了一种基于MPS430单片机实现的雷达测速反馈屏的系统设计方案。
2 雷达车速反馈标志牌系统结构和硬件电路的设计如图1所示,雷达车速反馈标志牌系统主要由雷达测速模块、MCU系统控制处理模块、车速显示模块、系统供电模块组成。
以下分别对各功能模块进行研究设计。
图1 系统结构图2.1测速雷达模块2.1.1雷达测速基本原理高速鸣笛的火车向观察者飞奔而来,会感到音调(频率)有所升高,飞驰而去会感到音调有所降低。
雷达发射机以一固定频率的脉冲波对空扫描,若遇到运动的物体,则返回电波的频率与发射波的频率就会出现偏差,称为多普勒频率。
多普勒频率的大小与运动物体的速度函数关系为:(1)其中为多普勒频率;为运动物体的速度;为光速,为m/s;是运动目标的运动方向与雷达传感器与目标连线之间的角度;为雷达发射波频率。
2.1.2系统测速雷达传感器工作原理及电路的设计系统设计中采用了德国Innosent公司的24G双通道连续波(CW)多普勒雷达传感器IPS168,该传感器输出信号为2路频率幅度相同,相位差为90°的多普勒信号IF1和IF2,可根据它们信号相位差的正负值便可识别出物体的运动方向(远离或是靠近传感器)。