光电传感器在智能小车设计中的应用
- 格式:doc
- 大小:16.00 KB
- 文档页数:4
2011年第09期●(上接第58页)避免的。
2.3.2钢材期货的上市让更多的交易者了解并关注电子盘交易这种避险手段,打开了更为广阔的市场空间。
2.3.3钢材期货的上市为众多参与远期电子交易的经营者提供了跨市套利的机会。
目前全球只有中国、印度、迪拜、伦敦、日本等几个国家有钢材期货,而且印度、迪拜、伦敦、日本不成气候,交易者要实现跨市套利这种传统的投资手段,选择已经运作多年而且现在比较成熟的现货远期电子交易更为理想。
2.3.4期货和电子盘之间的互补关系。
目前期货市场上的标准品种只有螺纹钢和线材,并没有涉及到产量、需求量一直很高的热轧卷板、冷轧卷板,电子盘恰恰能填补这块空白。
总之,钢材期货只是一种金融衍生品,而电子盘是现货市场的衍生品。
钢材期货上市更多地吸引金融界投机者和个人投资者的参与,但由于期货专业知识复杂,钢材电子盘交易市场则能为更多的钢材贸易商提供熟悉的服务。
对于钢材贸易商而言,期货和电子盘就像汽车和飞机一样,只是两种不同的交通工具而已,根据不同群体喜好选择适合自己的不同的工具,但是最终都可以到达同一目的地。
科0.引言根据我们年级电子综合设计课程的要求,我们自选命题制作了循迹小车,使小车铺有黑线的白色跑道上自主循迹运行。
在小车的制作中很关键的一点就是合理的选择循迹传感器和设计传感器的布局,以提高小车循迹的精确程度。
智能车的设计就是在保证小车可靠运行的前提下,以电路设计简洁,灵活性高为原则,而传感器电路的设计和布局,是信号采集的关键,相当于小车的“眼睛”,为了提高小车的自主循迹性能,需要对传感器进行合理的选择和布局。
1.解决方案选用RPR220型光电对管。
RPR220是一种反射型光电探测器,其发射器是一个砷化镓红外发光二极管,而接收器是一个高灵敏度,硅平面光电三极管。
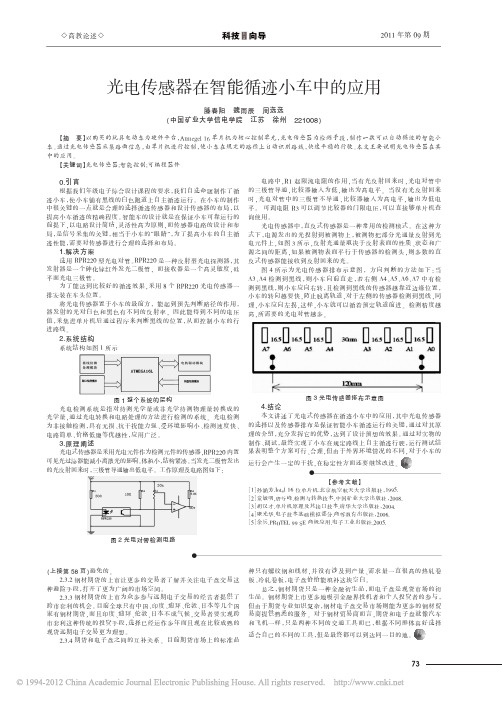
为了能达到比较好的循迹效果,采用8个RPR220光电传感器一排安装在车头位置。
将光电传感器置于小车的最前方,能起到预先判断路径的作用,器发射的光对白色和黑色有不同的反射率,因此能得到不同的电压值,采集进单片机后通过程序来判断黑线的位置,从而控制小车的行进路线。

学 术 论 坛207 科技资讯 SCIENCE & TECHNOLOGY INFORMATION 在当今社会中,随着科学技术的日新月异,单片机与光电传感器接口程序的实际应用愈来愈普遍。
光电传感器作为传感器的一张新形式具有,体积小、性能高、不触碰被测物体,精准测量被测物体的运转形式等优点。
光电传感器普遍应用于多费率电表、IC卡压力表与电能转换装置转速测量等诸多测量计数的工具。
1 光电传感器概述1.1光电传感器的结构分析以光电器件作为程序元件的传感器就是光电式传感器。
它能够用于测量更替为光量转换的其他非电量,如部件半径、表面光滑度、更替、移动、振动、速度,以及被测物体的体积、工作途径的认定等;也能够用来测量直接引起光量转换的非电量,如光强、光照度、辐射测温、气体成分分析等。
光电式传感器具有非接触、响应快、性能可靠等突出特点,因此在工业自动化装置和机器人中获得普遍应用。
新的光电器件持续涌现,尤其是CCD图像传感器的出现,为光电传感器的进一步应用开创了新的历史纪元。
光电传感器一般由发送器、接收器和测量程序等三部分构成。
1.2光电传感器工作原理依据光通量对光电部件的作用原理不同所设计的光学控制程序的形式是繁多复杂的,依照光学测控程序发出量性质能够把测控程序分为两种,即模拟式光电传感器与开关式光电传感器。
模拟式光电传感器是将被测量物体更替成不断转换的光电流,它与被测量物体之间呈单值关系。
模拟式光电传感器依据被测量(测量目标物体)途径能够分为透射(吸收)式,漫反射式与遮光式(光线阻档)三大种类。
透射式指的是被测物体放在光路程序中,恒光源射发的光能量穿过被测物,部份被吸收后,透射光投射到光电元件上;漫反射式指的是恒光源射发的光投然后由被测物体的表面反射到光电元件上;遮光式指的是当光源射发的光通量经被测物光遮其中的一部份,使投射到光电元件上的光通量更替,更替的幅度与被测物体在光路路径相关。
光电传感器是利用把光强度的转换更替成电红外线的转换来落实驱动的。

基于光电传感器的智能小车自动寻迹控制系统宁慧英【摘要】在智能车自动寻迹系统中,自动寻线、避障及速度控制是智能车自动寻迹控制的基本功能.用于检测路径引导线的光电传感器阵列采用发光二极管和光敏电阻制作,检测车速和障碍物的功能则采用反射式红外光电传感器FS-359F实现,采用单片机STC12C5A60S2作为控制器,通过PWM控制方式对驱动电机进行调速,并根据路面和车速信息进行转向控制.试验表明,采用上述光电传感器的智能小车寻迹控制系统实现了智能小车沿路径引导线自动避障行驶.系统体积小、成本低、性能稳定可靠.%In automatic rail guided system for Intelligent smallcar,automatic rail guidance,obstacle avoidance and car speed detection are three fundamental functions. The photoelectricity sensors array for path rail detection were made by optodiodes and optoresisters. The function of detecting speed and obstacle was realized by reflective optoelectric sensors FS0359F. The MCU STC12C5A60S2 were used as central control unit, which output PWM signals to adjust the speed of driving motors and control the moving direction of small car by road environment and car speed information. The experiments show that the automatic rail guided control system has realized automatic moving control with rail guidance and obstacle avoiding for the intelligent small car. It is a system of low cost,small size and stable fuction.【期刊名称】《仪表技术与传感器》【年(卷),期】2012(000)001【总页数】3页(P108-110)【关键词】智能车;光电传感器;自动寻迹控制【作者】宁慧英【作者单位】沈阳职业技术学院电气工程系,辽宁沈阳110045【正文语种】中文【中图分类】TP273.5;TP290 引言智能车又称轮式移动机器人,能够按预设模式在特定环境中自动移动,无需人工干预,可应用于科学勘探、现代物流等方面。

基于STM32的智能循迹避障小车智能循迹避障小车是一种基于STM32微控制器的智能车辆,它可以根据预设的路径自动行驶并能够避开障碍物。
这种小车具有很高的自主性和智能性,非常适合用于教学、科研和娱乐等领域。
本文将介绍基于STM32的智能循迹避障小车的设计原理、硬件结构、软件开发以及应用场景。
一、设计原理智能循迹避障小车的设计原理主要包括传感器感知、决策控制和执行动作三个部分。
通过传感器感知车辆周围环境的变化,小车可以及时做出决策并执行相应的动作,从而实现自动行驶和避障功能。
在基于STM32的智能小车中,常用的传感器包括红外避障传感器、光电传感器和编码器等。
红外避障传感器可以检测到障碍物的距离和方向,从而帮助小车避开障碍物。
光电传感器可以用于循迹,帮助小车按照预定的路径行驶。
编码器可以用于测量小车的速度和位置,实现精确的定位和控制。
通过这些传感器的数据采集和处理,小车可以实现智能化的行驶和避障功能。
二、硬件结构基于STM32的智能循迹避障小车的硬件结构包括主控制板、传感器模块、执行器模块和电源模块。
主控制板采用STM32微控制器,负责控制整个车辆的运行和决策。
传感器模块包括红外避障传感器、光电传感器和编码器等,用于感知周围环境的变化。
执行器模块包括电机和舵机,用于控制车辆的速度和方向。
电源模块提供电能,为整个车辆的运行提供动力支持。
三、软件开发基于STM32的智能循迹避障小车的软件开发主要包括嵌入式系统的编程和算法的设计。
嵌入式系统的编程主要使用C语言进行开发,通过STM32的开发环境进行编译和调试。
算法的设计主要包括避障算法和循迹算法。
避障算法通过传感器的数据处理,判断障碍物的位置和距离,并做出相应的避开动作。
循迹算法通过光电传感器的数据处理,使小车能够按照预设的路径行驶。
四、应用场景基于STM32的智能循迹避障小车可以广泛应用于教学、科研和娱乐等领域。
在教学领域,可以用于智能机器人课程的教学实验,帮助学生掌握嵌入式系统的开发和智能控制的原理。

智能循迹避障小车设计说明智能循迹避障小车是一种基于微控制器控制的智能小车,它能够根据预设程序进行自主行驶、循迹和避障。
下面是对智能循迹避障小车的设计说明:1.硬件设计智能循迹避障小车的硬件设计包括以下组成部分:1.1 微控制器:使用单片机实现小车的控制和决策,采用常见的单片机有STC、ATmega、STM32等。
1.2 传感器:使用光电传感器进行循迹,超声波传感器进行避障。
在循迹方面,一般采用两个光电传感器,安装在小车底部,分别检测黑线和白色地面;在避障方面,一般采用超声波传感器,安装在小车前方,检测前方物体距离。
1.3 驱动电机:小车驱动电机一般采用直流减速电机,通过H桥驱动电路实现正反转控制。
1.4 电源:小车电源采用锂电池或干电池供电。
1.5 其他:小车还需要一些辅助元件,如LED指示灯、蜂鸣器等。
2.软件设计智能循迹避障小车的软件设计包括以下几个方面:2.1 循迹算法:根据光电传感器检测到的黑线和白色地面的信号,判断小车当前位置,控制小车朝着黑线方向运动。
2.2 避障算法:根据超声波传感器检测到的前方距离信息,判断小车前方是否有障碍物,避免碰撞。
2.3 控制逻辑:根据传感器数据计算得出的小车状态,进行控制决策。
比如,避障优先还是循迹优先,小车如何避障等。
2.4 通信协议:如果需要远程控制或传输数据,需要设计相应的通信协议。
3.功能实现基于硬件和软件设计,实现智能循迹避障小车以下功能:3.1 循迹:小车能够自主行驶,按照预设的循迹算法进行路径规划和执行。
3.2 避障:小车能够根据预设的避障算法,自主避开前方障碍物,避免碰撞。
3.3 情境感知:小车能够通过传感器感知环境,根据感知到的信息做出相应的控制决策。
3.4 远程控制:如果需要,可以通过通信模块实现小车的远程控制和数据传输。
摘要制作自动寻迹小车所涉及的专业知识包括控制、模式识别、传感技术、汽车电子、电气、计算机、机械等诸多学科。
为了使小车能够快速稳定的行驶,设计制作了小车控制系统。
在整个小车控制系统中,如何准确地识别路径及实时地对智能车的速度和方向进行控制是整个控制系统的关键。
由于此小车能够自动寻迹,加速,减速.故又被称作为智能车.本智能车控制系统设计以MC9S12XS128微控制器为核心,通过两排光电传感器检测小车的位置和运动方向来获取轨道信息,根据轨道信息判断出相应的轨道类型,并分配不同的速度给硬件电路加以控制,完成了在变负荷条件下对速度的快速稳定调节。
红外对射传感器用于检测智能车的速度,以脉宽调制控制方式(PWM)控制电机和舵机以达到控制智能车的行驶速度和偏转方向。
软件是在CodeWarrior 5.0的环境下用C语言编写的,用PID控制算法调节驱动电机的转速和舵机的方向,完成对模型车运动速度和运动方向的闭环控制。
智能车能够准确迅速地识别特定的轨道,并沿着引导线以较高的速度稳定行驶。
整个智能车系统涉及车模机械结构的改装、传感器电路设计及控制算法等多个方面。
经过多次反复的测试,最终确定了现有的智能车模型和各项控制参数。
关键词:MC9S12XS128;PID;PWM;光电传感器;智能车ABSTRACTMaking automatic tracing car involved the professional knowledge including control, pattern recognition, sensing technology, automobile electronics, electrical, computer, machinery and so on many subjects. According to the technical requirements of the contest, we design the intelligent vehicle control system. In the entire control system of the smart car, how to accurately identify the road and real-time control the speed and direction of the Smart Car is the key to the whole control system.Because this car can automatic tracing, accelerate, slowing down. So it is also known as intelligent car this intelligent vehicle control system design take the MC9S12XS128 micro controller as a core, examines car's position and the heading through two row of photoelectric sensors gains the racecourse information, judges the corresponding racecourse type according to the racecourse information, and assigned the different speed to control for the hardware circuit, has completed in changes under the load condition to the speed fast stable adjustment. The infrared correlation sensor uses in examining the intelligent vehicle's speed, (PWM) controls the electrical machinery and the servo by the pulse-duration modulation control mode achieves the control intelligence vehicle's moving velocity and the deflection direction.The software is under the CodeWarrior 5.0 environment with the C language compilation, actuates electrical machinery's rotational speed and servo's direction with the PID control algorithm adjustment, completes to the model vehicle velocity of movement and the heading closed-loop control. The intelligent vehicle can distinguish the specific racecourse rapidly accurately, and along inlet line by the high speed control travel.The entire intelligent vehicle system involves the vehicle mold mechanism the re-equipping, the sensor circuit design and the control algorithm and so on many aspects. After the repeated test, has determined the existing intelligent vehicle model and each controlled variable finally many times.Keywords:MC9S12XS128; PID;PWM;photoelectric sensor; smart car目录第一章绪论 (1)1.1引言 (1)1.2本文设计方案概述 (1)1.2.1总体设计 (1)1.2.2传感器设计方案 (2)1.2.3控制算法设计方案 (4)第二章机械结构设计 (5)2.1前轮倾角的调整 (5)2.2齿轮传动机构调整 (5)2.3后轮差速机构调整 (6)2.4红外传感器的固定 (6)2.5小车重心的调整 (6)2.6齿轮啮合间隙的调整 (7)第三章硬件电路的设计 (8)3.1系统硬件概述 (8)3.2电源模块的设计 (9)3.2.1 LM2940供电电路 (10)3.2.2 LM2596供电电路 (11)3.3电机驱动模块 (12)3.3.1模块介绍 (12)3.3.2使用说明 (13)3.3.3电压电流测试结果 (14)3.4舵机控制模块 (15)3.5路径识别模块 (16)3.7单片机模块的设计 (18)3.8硬件电路部分总结 (18)第四章软件系统设计 (20)4.1智能车控制算法监测平台 (20)4.2主程序流程图 (20)4.3系统的模块化结构 (21)4.3.1时钟初始化 (21)4.3.2串口初始化 (22)4.3.3 PWM初始化 (23)4.4中断处理流程 (25)4.5小车控制算法 (25)4.5.1舵机控制 (26)4.5.2速度控制 (27)4.6坡道的处理 (29)4.7弯道策略分析 (29)第五章开发与调试 (31)5.1软件开发环境介绍 (31)5.2智能车整体调试 (34)5.2.1 舵机调试 (34)5.2.2 电机调试 (34)5.2.3 动静态调试 (34)第六章结论 (36)6.1智能车的主要技术参数说明 (36)6.2总结 (36)6.3不足与展望 (36)参考文献 (37)致谢 (38)附录1 (39)附录2 (47)附录3 (60)第一章绪论1.1引言思路及技术方案是一个工程项目的灵魂。
循迹小车实验报告循迹小车实验报告引言:循迹小车是一种基于光电传感器的智能机器人,能够根据环境中的光线变化来调整行进方向。
本实验旨在通过搭建一个循迹小车模型,探索其原理和应用。
一、实验材料和方法本次实验所需材料包括Arduino开发板、直流电机、光电传感器、电池组等。
首先,我们将Arduino开发板与直流电机、光电传感器等器件进行连接,确保电路正常。
然后,将循迹小车放置在一个光线变化较大的环境中,例如黑白相间的地面。
最后,通过编写程序,使循迹小车能够根据光电传感器的信号来判断行进方向,并实现自动循迹。
二、实验过程和结果在实验过程中,我们首先对光电传感器进行了校准,以确保其能够准确地感知光线的变化。
然后,我们编写了一段简单的程序,使循迹小车能够根据光电传感器的信号来判断行进方向。
当光线较亮时,循迹小车向左转;当光线较暗时,循迹小车向右转。
通过不断调试程序,我们成功实现了循迹小车的自动循迹功能。
在实验过程中,我们还发现了一些有趣的现象。
例如,当循迹小车行进到黑白相间的地面上时,光电传感器能够准确地感知到黑白色块的变化,并根据信号进行相应的调整。
这说明循迹小车的循迹原理基于光线的反射和吸收,具有一定的环境适应性。
三、实验结果分析通过本次实验,我们深入了解了循迹小车的原理和应用。
循迹小车通过光电传感器感知环境中的光线变化,从而判断行进方向,实现自动循迹。
这种智能机器人在工业生产、仓储物流等领域具有广泛的应用前景。
然而,循迹小车也存在一些局限性。
首先,其循迹能力受到环境光线的影响较大,当环境光线较弱或过强时,循迹小车的准确性会受到一定的影响。
其次,循迹小车只能在特定的地面上进行循迹,对于其他类型的地面可能无法正常运行。
因此,在实际应用中,需要根据具体情况进行合理选择和调整。
四、实验总结通过本次实验,我们对循迹小车的原理和应用有了更深入的了解。
循迹小车作为一种基于光电传感器的智能机器人,具有自动循迹的功能,可以在工业生产、仓储物流等领域发挥重要作用。
寻迹智能车系统中光电传感器的应用摘要在寻迹智能车系统中,光电传感器的选用十分重要,特别是要求能够在高速运行条件下达到稳定状态的系统中,其重要性更为突出。
经过反复实验验证,在系统达到稳定的前提下,一般的光敏三极管,如国产3DU系列,对路面反射光信号的检测距离在15cm左右。
激光传感器对路面反射光信号的检测距离可以达到90cm。
关键词光电传感器;检测距离;前瞻性;寻迹智能车在自动寻迹智能车系统中,光电传感器的选用是一个至关重要的问题。
现在有很多智能车竞赛都是要求能够完成自动寻迹,如:“飞思卡”杯智能车比赛、瑞萨车模比赛和2003年全国大学生电子设计竞赛“简易智能电动车”等。
自动寻迹主要是要求系统能够辨别出路面的差异,一般是对黑色和白色进行辨别。
由于不同颜色的反射率不同,产生强度不同的光信号。
采用相应的光电传感器就可以对信号做出正确的判断。
本文主要讨论三种不同特性的光电传感器对智能车系统的影响,以及它们的优缺点。
1系统概述寻迹智能车主要包括:光电传感器,用于检测路面信息,将光信号转化为电信号;单片机,单片机的选择范围比较广泛,但也有一些比赛中指定了具体的型号。
其主要作用是对光电传感器采集的信号进行判断处理,控制整个系统的运行;车模,主要包括驱动电机、转向舵机;电源模块提供光电传感器、单片机和电机的电源。
整个系统的工作原理为:光电传感器能够检测到路面反射光信号的强弱。
因为寻迹智能车路面一般采用白色为背景,上面铺有黑色的条带。
采用数量合适的光电传感器就可以检测出路面各个位置的光信号强度,并将其转化为相应的电信号。
将光电传感器输出的电信号送入单片机进行处理,判断出当前车模的位置信息,进而单片机发出控制信号控制驱动电机以及舵机做出相应的动作使车模沿着黑色条带运行。
由此可见,光电传感器就是智能车的“眼睛”。
2几种光电传感器的工作原理与调试结果2.1发射—接收一体器件,光耦合器这种光电传感器的型号有很多,如ST188、TCRT5000等。
光电传感器在自主驾驶车辆中的应用随着科技的不断发展,自主驾驶技术成为汽车行业的热门话题。
自主驾驶车辆需要准确感知周围环境,以便做出准确的决策并进行安全操作。
光电传感器作为一种重要的感知技术,被广泛应用于自主驾驶车辆的环境感知和光学识别中。
本文将探讨光电传感器在自主驾驶车辆中的应用及其优势。
首先,光电传感器在自主驾驶车辆中的应用可以大致分为两个方面:环境感知和光学识别。
在环境感知方面,光电传感器可以帮助车辆感知实时道路情况、障碍物、行人和交通信号灯等。
特别是在夜间或恶劣的天气条件下,光电传感器能够提供可靠的环境数据,提高自主驾驶车辆的行驶安全性。
在光学识别方面,利用光电传感器的图像处理算法,车辆能够识别道路标志、车道线和交通标志等重要信息,为自主驾驶车辆做出准确的决策提供支持。
在自主驾驶车辆中,光电传感器的应用带来多重优势。
首先,光电传感器能够实时感知周围环境,并提供高精度的数据。
这对于自主驾驶车辆来说至关重要,因为只有准确地了解周围环境,车辆才能够做出正确的决策。
其次,光电传感器可以提供多种感知模式,如红外线、激光雷达和相机等,这使得自主驾驶车辆能够全面感知周围环境,避免盲点和漏报等问题。
此外,光电传感器还具有高精度、高速度和高分辨率的特点,能够满足自主驾驶车辆对数据的实时性和准确性的要求。
光电传感器的应用在自主驾驶车辆中也存在一些挑战。
首先,光电传感器的成本相对较高,这增加了自主驾驶汽车的制造成本。
其次,光电传感器在恶劣天气条件下的性能可能会受到一定程度的影响,如雨雪天气下的图像质量下降等。
此外,光电传感器需要处理大量的数据,因此需要具备高性能的计算能力和强大的数据处理能力。
这些都是需要在设计和应用过程中解决的问题。
为了克服这些挑战,研究人员和汽车制造商正在不断努力改进光电传感器的性能和技术。
一方面,他们致力于降低光电传感器的成本,使其更加经济实用。
另一方面,他们开发新的光学技术和算法,以提高光电传感器在恶劣天气条件下的性能,并加强对大数据的处理能力。
一、实验目的1. 了解光电传感器的基本原理和应用。
2. 掌握光电寻迹小车的制作方法。
3. 培养学生的动手能力和创新意识。
二、实验原理光电寻迹小车是一种利用光电传感器检测地面颜色差异,实现小车沿特定路径行驶的智能小车。
实验中,我们采用红外反射式光电传感器,当传感器检测到白色地面时,输出高电平信号;当检测到黑色线路时,输出低电平信号。
通过单片机对传感器信号进行处理,控制小车前进、转弯、停止等动作。
三、实验器材1. 小车底盘2. 红外反射式光电传感器3. AT89S52单片机4. 电机驱动模块5. 直流电机6. 电源模块7. 连接线8. 黑色纸带四、实验步骤1. 搭建电路(1)将红外反射式光电传感器连接到AT89S52单片机的P1.0端口。
(2)将电机驱动模块连接到AT89S52单片机的P2端口。
(3)将直流电机连接到电机驱动模块。
(4)将电源模块连接到小车底盘。
(1)编写程序,实现以下功能:- 初始化单片机端口;- 读取光电传感器信号;- 根据光电传感器信号控制小车行驶;- 设置小车前进、转弯、停止的速度和方向;(2)将程序烧录到AT89S52单片机。
3. 调试(1)将黑色纸带铺设在地面上,作为小车的行驶路径。
(2)接通电源,观察小车是否能够按照既定路径行驶。
(3)根据实际情况调整程序参数,确保小车稳定行驶。
五、实验结果与分析1. 实验结果经过调试,小车能够按照既定路径稳定行驶,实现了光电寻迹功能。
2. 实验分析(1)红外反射式光电传感器能够有效检测地面颜色差异,实现小车寻迹。
(2)单片机对传感器信号进行处理,控制小车行驶,实现了智能控制。
(3)实验过程中,通过调整程序参数,优化了小车行驶性能。
六、实验总结1. 本实验成功制作了一台光电寻迹小车,实现了小车沿黑色纸带行驶的功能。
2. 通过实验,掌握了光电传感器的基本原理和应用,提高了学生的动手能力和创新意识。
3. 在实验过程中,遇到了一些问题,如小车行驶不稳定、转弯不顺畅等。
光电传感器在智能小车设计中的应用
作者:沈芳
来源:《科技资讯》2014年第17期
摘要:本文简要分析了电传感器的结构及其工作的原理。
并从光电传感器的工作原理为基础,对智能小车的运作加以设计,本文首先指出了光电传感器在智能小车中的应用的相关部件,并对这些部件的作用加以简单的介绍。
此后光有对电传感器在智能小车中的应用加以详细的编程,分析其运作的程序。
关键词:光电传感器智能小车应用
中图分类号:TP273.5 文献标识码:A 文章编号:1672-3791(2014)06(b)-0207-01
在当今社会中,随着科学技术的日新月异,单片机与光电传感器接口程序的实际应用愈来愈普遍。
光电传感器作为传感器的一张新形式具有,体积小、性能高、不触碰被测物体,精准测量被测物体的运转形式等优点。
光电传感器普遍应用于多费率电表、IC卡压力表与电能转换装置转速测量等诸多测量计数的工具。
1 光电传感器概述
1.1 光电传感器的结构分析
以光电器件作为程序元件的传感器就是光电式传感器。
它能够用于测量更替为光量转换的其他非电量,如部件半径、表面光滑度、更替、移动、振动、速度,以及被测物体的体积、工作途径的认定等;也能够用来测量直接引起光量转换的非电量,如光强、光照度、辐射测温、气体成分分析等。
光电式传感器具有非接触、响应快、性能可靠等突出特点,因此在工业自动化装置和机器人中获得普遍应用。
新的光电器件持续涌现,尤其是CCD图像传感器的出现,为光电传感器的进一步应用开创了新的历史纪元。
光电传感器一般由发送器、接收器和测量程序等三部分构成。
1.2 光电传感器工作原理
依据光通量对光电部件的作用原理不同所设计的光学控制程序的形式是繁多复杂的,依照光学测控程序发出量性质能够把测控程序分为两种,即模拟式光电传感器与开关式光电传感器。
模拟式光电传感器是将被测量物体更替成不断转换的光电流,它与被测量物体之间呈单值
关系。
模拟式光电传感器依据被测量(测量目标物体)途径能够分为透射(吸收)式,漫反射式与遮光式(光线阻档)三大种类。
透射式指的是被测物体放在光路程序中,恒光源射发的光能量穿过被测物,部份被吸收后,透射光投射到光电元件上;漫反射式指的是恒光源射发的光投然后由被测物体的表面反射到光电元件上;遮光式指的是当光源射发的光通量经被测物光遮其中的一部份,使投射到光电元件上的光通量更替,更替的幅度与被测物体在光路路径相关。
光电传感器是利用把光强度的转换更替成电红外线的转换来落实驱动的。
发送器对准目标投射光线,投射的光线普遍来源于半导体光源、吸光二极管还有红外投射二极管。
光线持续地投射,或更替脉冲宽度。
接收器包括光电二极管、光电三极管、光电池等构成部件。
在接收器的前端,配置了透镜和光圈等光学元件。
在其背部则是测量程序,它可以筛选出有效红外线,并对该红外线加以应用。
2 光电传感器在智能小车中的设计与运用
2.1 光电传感器在智能小车中的应用的相关部件
光电传感器在智能小车中的应用程序主要包括单片机驱动、光电测量、电能转换装置运作以及表现运作等四部分构成部分。
单片机驱动程序的主要作用为:按照传感器发出红外线实施对应的动作,驱动电能转换装置运作程序使小汽车依据事先预设方向和速度运转、运作测量工具测量智能小车的速度、运转的长度以及运转的时间。
光电测量部分的主要作用为:测量出地面的测量纸和测量线,发出对应的脉冲红外线,完成测量的作用。
电能转换装置运作程序的主要作用为:扩大源于单片机驱动部分的红外线,运作电能转换装置做正反转运转。
2.2 光电传感器在智能小车中的应用编程
在实际应用时,当上电后该程序处于静候状态,当光电传感器测量到地面上第一条测量线时,智能小车开始运转。
使用中断方式界定小汽车到达黑线的位置并驱动小汽车的运行形式。
在实际运行中,电能转换装置转动时对进入单片机的高电平有干扰,即在测量到黑色测量线时,受到噪音的影响,产生了许多杂波,产生测量到了白色测量线的错觉,导致电能转换装置不能正常的工作,使用软件推后的途径,测量到黑色测量线以后,推后一段时间,再测量有效的白线,电能转换装置运作对应的动作,解决了以上问题。
各程序说明如下。
主程序:主要负责落实初始化任务,设定智能小车的启动运转形式以及调用显示子程序等。
初始化程序:主要完成各个单元清零以及设置定时器T1、外中断0、外中断1等。
外中断0:主要落实按照光电测量器测量到的小汽车的位置驱动小汽车的运行。
SUB1:慢车子程序。
实施程序时,先使电能转换装置反转约180 ms,使其停止运作,然后将放大器的供电电压降低,使电能转换装置慢速运转。
SUB1:快车子程序。
实施程序时,供高电压给电能转换装置电源,使小汽车快速运转。
SUB1:停车子程序。
实施程序时,先使电能转换装置反转约,使其刹车,然后关掉电能转换装置电源,再推后10 s,运作初始化,实施倒车运转。
推迟子程序:旨在进一步增强光电测量器的测量精准度,杜绝扰乱,以及进一步改善LED的显示成效,均调用了推迟子程序。
显示子程序:用动态扫描的途径运作显示,使用一片MAX7219运作8片LED。
运转的长度用前四位显现,运转的总时间用后四位显现,其中前两位以分为显现的时间单位,后两位以秒为显现的时间单位。
3 结语
本程序的设计以光电传感器工作原理为基础,用单片机控制程序落实了智能小车的驱动,并能很便捷地表现出智能小车的速度、运转长度和运转时间。
实际实验结果证明,该程序性能高,软件编程比较灵活,具有一定的实用性。
本文所采用的程序设计只是一种简单的形式,相信在未来的几十年里光电传感器的应用会越来越广泛。
参考文献
[1] 赵渊.光电传感与测控技术的实现与研究[J].科技致富向导,2010(21):102,141.
[2] 郭传宝,刘峰,朱本宏.光电传感器的应用[J].中国井矿盐,2011,42(1):29-30.
[3] 刘芹,秦魏,赵继聪.光电传感器在自动控制窗帘中的应用[J].科技致富向导,2011(8):123.
[4] 王晓东,赵杰,蔡鹤皋.采用线型PSD设计激光位移传感器的研究[J].仪表技术与传感器,1996(3):34-36.
[5] 滕春阳,魏雨辰,周选选.光电传感器在智能循迹小车中的应用[J].科技致富向导,2011(9):73.
[6] 杨锋力,李群明,黄明辉,杨安全.磁悬浮球系统中光电传感器的研究与设计[J].电光与控制,2005(4):65-67,70.。