SABER_与控制系统仿真
- 格式:pdf
- 大小:336.05 KB
- 文档页数:15
(整理)Saber仿真实例.Saber 仿真开关电源中变压器的Saber仿真辅助设计 (2)⼀、Saber在变压器辅助设计中的优势 (2)⼆、Saber 中的变压器 (3)三、Saber中的磁性材料 (7)四、辅助设计的⼀般⽅法和步骤 (9)1、开环联合仿真 (9)2、变压器仿真 (10)3、再度联合仿真 (11)五、设计举例⼀:反激变压器 (12)五、设计举例⼀:反激变压器(续) (15)五、设计举例⼀:反激变压器(续⼆) (19)Saber仿真实例共享 (26)6KW移相全桥准谐振软开关电焊电源 (27)问答 (28)开关电源中变压器的Saber仿真辅助设计经常在论坛上看到变压器设计求助,包括:计算公式,优化⽅法,变压器损耗,变压器饱和,多⼤的变压器合适啊?其实,只要我们学会了⽤Saber这个软件,上述问题多半能够获得相当满意的解决。
⼀、Saber在变压器辅助设计中的优势1、由于Saber相当适合仿真电源,因此对电源中的变压器营造的⼯作环境相当真实,变压器不是孤⽴地被防真,⽽是与整个电源主电路的联合运⾏防真。
主要功率级指标是相当接近真实的,细节也可以被充分体现。
2、Saber的磁性材料是建⽴在物理模型基础之上的,能够⽐较真实的反映材料在复杂电⽓环境中的表现,从⽽可以使我们得到诸如⽓隙的精确开度、抗饱和安全余量、磁损这样⼀些⽤平常⼿段很难获得的宝贵设计参数。
3、作为⼀种⾼性能通⽤仿真软件,Saber并不只是针对个别电路才奏效,实际上,电⼒电⼦领域所有电路拓扑中的变压器、电感元件,我们都可以把他们置于真实电路的仿真环境中来求解。
从⽽放弃⼤部分繁杂的计算⼯作量,极⼤地加快设计进程,并获得⽐⼿⼯计算更加合理的设计参数。
saber⾃带的磁性器件建模功能很强⼤的,可以随意调整磁化曲线。
但⼀般来说,⽤mast模型库⾥⾃带的模型就⾜够了。
⼆、Saber 中的变压器我们⽤得上的 Saber 中的变压器是这些:(实际上是我只会⽤这些分别是:xfrl 线性变压器模型,2~6绕组xfrnl ⾮线性变压器模型,2~6绕组单绕组的就是电感模型:也分线性和⾮线性2种线性变压器参数设置(以2绕组为例):其中:lp 初级电感量ls 次级电感量np、ns 初级、次级匝数,只是显⽰⽤,不是真参数,可以不设置rp、rs 初级、次级绕组直流电阻值,默认为0,实际应该是该绕组导线的实测或者计算电阻值,在没有得到准确数据前,建议⾄少设置⼀个⾮0值,⽐如1p(1微微欧姆)k 偶合(互感)系数,建议开始设置为1,需要考虑漏感影响时再设置为低于1的值。
Saber仿真软件特点和应用有哪些saber仿真软件是美国Synopsys公司的一款EDA软件,被誉为全球最先进的系统仿真软件,是唯一的多技术、多领域的系统仿真产品,现已成为混合信号、混合技术设计和验证工具的业界标准,可用于电子、电力电子、机电一体化、机械、光电、光学、控制等不同类型系统构成的混合系统仿真,为复杂的混合信号设计与验证提供了一个功能强大的混合信号仿真器,兼容模拟、数字、控制量的混合仿真,可以解决从系统开发到详细设计验证等一系列问题。
一、Saber仿真软件特点1.集成度高:从调用画图程序到仿真模拟,可以在一个环境中完成,不用四处切换工作环境。
2.完整的图形查看功能:Saber提供了SaberScope和DesignProbe来查看仿真结果,而SaberScope功能更加强大。
3.各种完整的高级仿真:可进行偏置点分析、DC分析、AC分析、瞬态分析、温度分析、参数分析、傅立叶分析、蒙特卡诺分析、噪声分析、应力分析、失真分析等。
4.模块化和层次化:可将一部分电路块创建成一个符号表示,用于层次设计,并可对子电路和整体电路仿真模拟5.模拟行为模型:对电路在实际应用中的可能遇到的情况,如温度变化及各部件参数漂移等,进行仿真模拟6.强大的收敛性分析:Saber非常仔细地选择了算法,使遇见收敛性问题的可能性降到最小,这是其它仿真器经常遇到而无法解决的问题。
Saber顺序的使用了5种强大的算法来解决收敛性问题,在系统评估时,Saber对精确系统方程提出一种分段式线性评估。
这样,即使非常困难的仿真问题,如尖锐信号的瞬态分析,都可以被很好地控制。
7.仿真精度:在做仿真时,你需要确信仿真结果能精确反映你的物理系统的操作。
根据Avant!丰富的设计和仿真经验,Saber默认的精度控制可以在能够接受的仿真时间内提供高精度的仿真结果。
8.模型与仿真器分离:Saber仿真器同仿真模型完全分离,它允许你完整地存取和控制模型。
基于SABER软件的数字控制电源系统的仿真设计
胡雪莲;陈新
【期刊名称】《通信电源技术》
【年(卷),期】2006(23)6
【摘要】在电源系统的设计中,计算机仿真已得到广泛的应用.由于数字控制电源的控制算法等均由数字处理器编程实现,而数字处理器的工作特点决定了数据处理过程是离散化的,因此设计出能够反映数字控制系统离散化特点的仿真模型,是数字控制电源系统仿真亟待解决的问题.文中在分析数字处理器的工作特点的基础上,提出一种适合于数字控制电源系统的建模仿真方法.由于该仿真模型非常贴近于实际的数字控制电源系统,因而可以用于数字系统的原理分析和参数整定等,所获得的参数对于控制系统设计具有重要的参考价值.
【总页数】4页(P50-53)
【作者】胡雪莲;陈新
【作者单位】南京航空航天大学,江苏,南京,210016;南京工业职业技术学院,江苏,南京,210016;南京航空航天大学,江苏,南京,210016
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于 Saber 仿真软件的直流电子负载设计 [J], 李岩;邢红宏;苏学军;汪兴海
2.基于Saber的弹载二次电源系统建模与仿真 [J], 丁旭;余志勇;李旭;金睿
3.基于saber软件开关电路的仿真 [J], 李方圆;李晓
4.基于SABER软件的反激式开关电源的仿真与研究 [J], 孟巧云
5.数字控制全桥软开关电源的Saber仿真分析 [J], 岳鹏;田联房
因版权原因,仅展示原文概要,查看原文内容请购买。
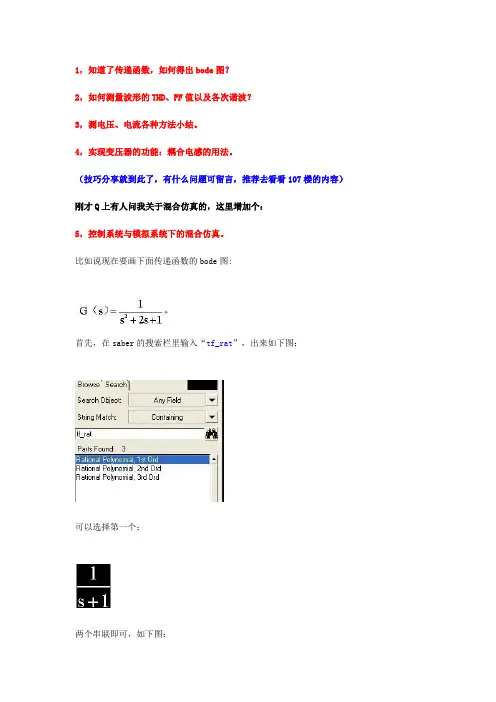
1,知道了传递函数,如何得出bode图?2,如何测量波形的THD、PF值以及各次谐波?3,测电压、电流各种方法小结。
4,实现变压器的功能:耦合电感的用法。
(技巧分享就到此了,有什么问题可留言,推荐去看看107楼的内容)刚才Q上有人问我关于混合仿真的,这里增加个:5,控制系统与模拟系统下的混合仿真。
比如说现在要画下面传递函数的bode图:首先,在saber的搜索栏里输入“tf_rat”,出来如下图:可以选择第一个:两个串联即可,如下图:这样就实现了上面的传递函数。
这里的source需要用到控制系统下的,可搜“c_sin”,选择第一个,如下:当然了,不一定非要这个,因为可以通过接口转换来实现,这是后话。
关于tf_rat的设置如下:这样就实现了函数:1/(s+1)最后的连接图:先netlist再DC分析然后小信号分析,看下面设置:最后的bode图:至此,bode图已经画出来了,很简单哈,剩下的就是自己去分析了~这里附上上面仿的附件,方便下载。
双击轴线,AXIS ATTRIBUTE对话框里的GRID increment可以调制轴线等分间距!!路径中不能有中文,要在全英文下看波形可以放大的,选中托一下即可。
要恢复回来,按下面按钮:不错,既然你仿出来了,你再试试这个传递函数哈:怎么跟上图差不多呢关于区别,你看看:这样看就出来区别了,哈哈怎么把两个波形放在同一个图中的?讲讲波形计算器吧,比如如何把某一个电流扩大十倍,电压扩大十倍便找个简单的电流扩大十20倍的小例子这是一个电流波形,点出计算器来点击图形右侧的电流标号i(l.lr),标号呈现白色表示选中,然后在计算器光标处左键按一下,右键再按一下,至此i(l.lr)添加到计算器中了。
其次在光标处输出20*,再次输入内容的话,以前的内容自动清除,从而计算器自动生成了i(l.lr)*20,这样计算器完成了计算。
计算其中delete为删除键。
最后点击Δ左边的绿色波形图,电流扩大十倍后如下图所示在saber,常用的电容就一种,可以不分极性的,如下:,如何测量波形的THD、PF值以及各次谐波在PFC的仿真以及并网逆变中,经常需要测量波形的THD,PF值,看各次谐波的大小。
使用Saber仿真的数字全桥开关主电路模拟
Saber可以说是在电子电路设计中最常用的一种模拟仿真软件。
设计者们经常使用这款软件来对各种设计方式进行建模和仿真分析。
本文就将介绍一款数字控制的全桥软开关电源仿真主电路部分。
感兴趣的朋友快来看一看吧。
开关电源技术发展到现如今的阶段,数字化已经成为一种趋势。
它可以实现快速、灵活的控制设计,改善电路的瞬态响应性能,使之速度更快、精度更高,可靠性更强。
因此,本文基于Saber仿真软件对采用数字控制的大功
率移相控制全桥ZVS电源系统(12V/5000A)进行了建模、仿真,并对仿真结果进行了分析。
主电路的建模
移相控制全桥ZVS2PWM变换器电路实现简单、工作可靠,而且充分利用了器件的寄生参数,不需要加入辅助电路,比较适合大功率低压大电流的应用场合,其主电路结构如图1所示。
图1移相控制全桥ZVS2PWM电源系统主电路
图2IGBT等效结构图
Saber软件提供了功率器件建模工具ModelAr2chitect,如图2所示为该工
具提供的IGBT等效电路模型,根据实际器件的参数调整图2中的各个参数
值即可完成建模。
本系统采用IGBT的型号为CM400HA-24E,其额定参数为1200V/400A。
电容c1~c4为外接谐振电容,其中c1=c3,c2=c4。
高频变压器采用两个单元变压器串并联的组合方式,它可以使并联的输出。
双管正激参数及控制环路的SABER仿真设计
引言
双管正激变换器开关管的电压应力等于输入电压,关断时也不会出现漏感尖峰,加上结构简单、可靠性高,在高输入电压的中、大功率场合得到广泛的应用。
在开关电源的设计过程中,控制环路设计的优劣关系到系统的稳定与否。
对于PWM 变换器的控制环路,传统的方法使用状态空间平均法,求出小信号模型,来设计控制环路。
此方法计算量大,效率低,不利于工程应用。
SABER 与其他仿真软件相比,具有更丰富的元件库和更精确的仿真描
述能力,真实性更好。
特别是在电源领域的先天优势,借助其强大的仿真功能缩短电源产品的上市时间。
目前,用SABER 软件设计控制环路尚不多见,基于此,提出用SABER 仿真设计双管正激参数及控制环路。
1 电路结构
双管正激拓扑结构如
2 控制环路的设计方法
系统稳定的条件:系统回路开环BODE 控制环路的设计步骤:
(1)根据应用要求设计主电路。
(2)由SABER 仿真器得出主电路的BODE(3)根据实际要求和限制条件确定剪切频率ωc,对电源产品,剪切频率通常为开关频率的1/4 或者
1/5。
(4)根据系统稳态精度的要求及剪切频率决定补偿放大器的类型和各频率点。
使低频段增益高,一般电源产品的低频段设计成I 型系统,以保证稳态精度;中频段带宽处的斜率为-20dB/dec,且有足够的相位裕度(即y45°);高频。
由于saber仿真要求较高,所以给新人造成了一些困扰,现在我们交流下一些常见错误的解决方法:
1)设置元件属性时加了单位,这就要抽脸了,初犯可以宽恕。
2)元件名文件名路径名有重复,saber也会报错。
3)***error "Alg_no_solution" *** Cannot find nonlinear system solution.
***error "Alg_iterations" *** Too many iterations.
我常用的方法是增大target iterations和max newton iterations,有时减小trunction error,一般都能解决。
当然也有其它方法,看另一个贴中我上传的资料。
4)*** ERROR \"ALG_SINGULAR_JACOBIAN\" *** Singular Jacobian matrix
先看你是否有自建的模型,可能模型错了,如果确定无误或没有,接着看。
是否接地,saber中不能有独立的系统的,即使隔离也需要共地,不然仿不了。
出现了电压环路电流环路,解决方法:给电容电感加初始值(或者并联一个很大的电阻串联很小的电阻仿过后去掉再仿它就搞定了,有些人就纳闷了怎么会这样,saber就这样这跟初始状态有关,有时第一天不行,第二天又能仿了)。
还有一个就是模型越界了,那就需要仔细检查电路了。
saber用户指南dc一章也对调试方法进行了讲解,不过比较烦人。
大家慢慢用吧,发现问题解决问题才能进步,当然saber对电源仿真得精确度那是没的说的,这也是saber如此火的缘故吧。
SABER与控制系统仿真1.应用背景1.1为什么要使用控制系统仿真对于SABER强大的电路仿真功能我们已经有所了解,在模块电路中,我们的反馈控制方法通常比较简单,一般就是一些电阻和电容的组合,但是对更为复杂的控制模式,控制参数的定义难以用模拟电路组合实现,指标间的对应关系也不直观,应用控制系统仿真,便于直观理解以便优化指标,便于转化到数字实现(DSP),而且可以实现一些复杂的控制方式(例如三相系统中常用的静止和旋转的坐标变换)1.2SABER在控制系统仿真的优势和制约优势:SABER作为混合仿真系统,可以兼容模拟,数字,控制量的混合仿真,便于在不同层面上分析和解决问题,其他仿真软件不具备这样的功能。
制约:不支持离散系统的频域分析,以及状态方程的分析方法。
1.3控制系统仿真应用范围主要应用在变频器,UPS,以及未来的数字化电源系统的控制算法设计部分。
2.基本方法2.1控制流原则在控制系统仿真中用到的模型有两个特点:1、它们都是无量纲的数值,不论电流,电压,速度,角度,在进行控制系统仿真之前都必须转化为无量纲的数字,因为对于控制处理机构而言,它只关心分析对象的数学行为,这是为了进行统一的分析。
2、信号流向是单相的,必须从一个模型的输出(out)口流入到另外一个模型的输入端口,不能颠倒。
而模拟电路器件的端口是不区分类别的,信号可以从断口流出也可以流入,只有正负号不同。
为了解释这个问题,我们看一个例子如下。
上图中左边和右边分别是一个RC并联电路在电路仿真和控制系统仿真中的描述,在控制系统中用一个积分环节表示电容,对于电路中的电容模型,我们可以以电压或者电流任何一个作为输入量求解另外一个,而在控制系统一旦确定模型方式,输入量就唯一确定,在该例子中选用积分环节,则输入只能是电流才能够描述电容行为,输入如果是电压量,则描述的就是一个电感了。
这也说明控制系统的模型具有普遍的应用性。
2.2基本模型类别首先我们以一个例子来看看控制系统中常用的有哪些模型:这是一个双环控制的半桥PFC的控制模型仿真图,图中用虚线框住的部分为主电路等效,下面部分为控制电路等效。
Saber 软件简介Saber软件主要用于外围电路的仿真模拟,包括SaberSketch和SaberDesigner两部分。
SaberSketch用于绘制电路图,而SaberDesigner 用于对电路仿真模拟,模拟结果可在SaberScope和DesignProbe中查看。
Saber的特点归纳有以下几条:1.集成度高:从调用画图程序到仿真模拟,可以在一个环境中完成,不用四处切换工作环境。
2.完整的图形查看功能:Saber提供了SaberScope和DesignProbe 来查看仿真结果,而SaberScope功能更加强大。
3.各种完整的高级仿真:可进行偏置点分析、DC分析、AC分析、瞬态分析、温度分析、参数分析、傅立叶分析、蒙特卡诺分析、噪声分析、应力分析、失真分析等。
4.模块化和层次化:可将一部分电路块创建成一个符号表示,用于层次设计,并可对子电路和整体电路仿真模拟。
5.模拟行为模型:对电路在实际应用中的可能遇到的情况,如温度变化及各部件参数漂移等,进行仿真模拟。
第一章用SaberSketch画电路图在SaberSketch的画图工具中包括了模拟电路、数字电路、机械等模拟技术库,也可以大致分成原有库和自定义库。
要调用库,在Parts Gallery中,通过对库的描述、符号名称、MAST模板名称等,进行搜索。
画完电路图后,在SaberSketch界面可以直接调用SaberGuide对电路进行模拟,SaberGuide的所有功能在SaberSketch中都可以直接调用。
➢启动SaberSketchSaberSketch包含电路图和符号编辑器,在电路图编辑器中,可以创建电路图。
如果要把电路图作为一个更大系统的一部分,可以用SaberSketch将该电路图用一个符号表示,作为一个块电路使用。
启动SaberSketch:▲UNIX:在UNIX窗口中键入Sketch▲Windows NT:在SaberDesigner程序组中双击SaberSketch图标下面是SaberSketch的用户界面及主要部分名称,见图1-1:退出SaberSketch用File>Exit。
Saber软件仿真流程:今天来简单谈谈Saber软件的仿真流程问题。
利用Saber软件进行仿真分析主要有两种途径,一种是基于原理图进行仿真分析,另一种是基于网表进行仿真分析。
前一种方法的基本过程如下:a.在SaberSketch中完成原理图录入工作;b.然后使用netlist命令为原理图产生相应的网表;c.在使用simulate 命令将原理图所对应的网表文件加载到仿真器中,同时在Sketch中启动SaberGuide界面;d.在SaberGuide界面下设置所需要的仿真分析环境,并启动仿真;e.仿真结束以后利用CosmosScope工具对仿真结果进行分析处理。
在这种方法中,需要使用SaberSketch和CosmosScope两个工具,但从原理图开始,比较直观。
所以,多数Saber的使用者都采用这种方法进行仿真分析。
但它有一个不好的地方就是仿真分析设置和结果观察在两个工具中进行,在需要反复修改测试的情况下,需要在两个窗口间来回切换,比较麻烦。
而另一种方法则正好能弥补它的不足。
基于网表的分析基本过程如下:a. 启动SaberGuide环境,即平时大家所看到的Saber Simulator图标,并利用load design 命令加载需要仿真的网表文件;b. 在SaberGuide界面下设置所需要的仿真分析环境,并启动仿真;c. 仿真结束以后直接在SaberGuide环境下观察和分析仿真结果。
这种方法要比前一种少很多步骤,并可以在单一环境下实现对目标系统的仿真分析,使用效率很高。
但它由于使用网表为基础,很不直观,因此多用于电路系统结构已经稳定,只需要反复调试各种参数的情况;同时还需要使用者对Saber软件网表语法结构非常了解,以便在需要修改电路参数和结构的情况下,能够直接对网表文件进行编辑。
Sketch的使用:1.今天讨论Saber Sketch的使用。
如果我们采样基于原理图的仿真方式,那么Sketch是我们在整个仿真过程中主要操作的一个界面。
Saber 软件介绍一、SABER 软件概述•Saber是美国Analogy(Synopsys)公司开发的系统仿真软件,被誉为全球最先进的系统仿真软件,也是唯一的多技术、多领域的系统仿真产品,现已成为混合信号、混合技术设计和验证工具的业界标准,可用于电子、电力电子、机电一体化、机械、光电、光学、控制等不同类型系统构成的混合系统仿真,这也是Saber的最大特点。
SABER作为混合仿真系统,可以兼容模拟、数字、控制量的混合仿真,便于在不同层面上分析和解决问题,其他仿真软件不具备这样的功能。
1.1 原理图输入和仿真SaberSketch是Saber的原理图输入工具,通过它可以直接进入Saber仿真引擎。
在SaberSketch 中,用户能够创建自己的原理图,启动Saber完成各种仿真(偏置点分析、DC分析、AC分析、瞬态分析、温度分析、参数分析、傅立叶分析、蒙特卡诺分析、噪声分析、应力分析、失真分析等),可以直接在原理图上查看仿真结果,SaberSketch及其仿真功能可以帮助用户完成混合信号、混合技术(电气、液压等)系统的仿真分析。
SaberSketch中的原理图可以输出成多种标准图形格式,用于报告、设计审阅或创建文档。
1.2 数据可视化和分析SaberScope是Saber的波形查看和仿真结果分析工具,它的测量工具有50多种标准的测量功能,可以对波形进行准确的定量分析。
它的专利工具——波形计算器,可以对波形进行多种数学操作。
SaberScope中的图形也可以输出成多种标准图形格式用于文档。
1.3 模型库Saber拥有市场上最大的电气、混合信号、混合技术模型库,它具有很大的通用模型库和较为精确的具体型号的器件模型,其元件模型库中有4700多种带具体型号的器件模型,500多种通用模型,能够满足航空、汽车、船舶和电源设计的需求。
Saber模型库向用户提供了不同层次的模型,支持自上而下或自下而上的系统仿真方法,这些模型采用最新的硬件描述语言(HDL),最大限度地保证了模型的准确性,支持模型共享。
收稿日期:2006207204作者简介:胡雪莲(19792),女,黑龙江人,南京航空航天大学在职硕士研究生,南京工业职业技术学院教师,攻读专业为电力电子与电力传动,研究方向为功率电子变换技术。
文章编号:100923664(2006)0620050204设计应用基于SABER 软件的数字控制电源系统的仿真设计胡雪莲1,2,陈 新1(1.南京航空航天大学,江苏南京210016;2.南京工业职业技术学院,江苏南京210016) 摘要:在电源系统的设计中,计算机仿真已得到广泛的应用。
由于数字控制电源的控制算法等均由数字处理器编程实现,而数字处理器的工作特点决定了数据处理过程是离散化的,因此设计出能够反映数字控制系统离散化特点的仿真模型,是数字控制电源系统仿真亟待解决的问题。
文中在分析数字处理器的工作特点的基础上,提出一种适合于数字控制电源系统的建模仿真方法。
由于该仿真模型非常贴近于实际的数字控制电源系统,因而可以用于数字系统的原理分析和参数整定等,所获得的参数对于控制系统设计具有重要的参考价值。
关键词:数字控制;电源;仿真;建模中图分类号:TN 86文献标识码:ADesign of Simulation and Modeling for Power Supply System Based on Digital ControlHU Xue 2lian 1,2,CH EN 1Xin(1.Nanjing University of Aeronautics &Astronautics ,Nanjing 210016,China ;2.Nanjing Institute of Industry &Technology ,Nanjing ,210016,China )Abstract :Nowadays ,computer simulation has been widely used in design of power supply systems.In the system of digital controlled power supply ,control scheme is programmed in digital processor.The character of processor decides that the process of datum disposal is discrete.Therefore ,it ’s a problem to establish simulation models which can reflect its discrete feature.This paper offers a method of modeling and simulating for digital controlled power supply system ,on the basis of analyzing the feature of how datum are processed in digital processor.Because this simulated model approximates to the practical digital controlled power supply system greatly ,it can be used to principle analyzing and parameter trimming in digital control system ,and the final simulated datum provide significant reference value for the practical digital controlled system.Key words :digital control ;power supply ;simulation ;modeling 随着数字信号处理技术的飞速发展,数字控制由于其控制理论与实施手段的不断完善,并且具有高度集成化控制电路、精确的控制精度,以及稳定的工作性能、良好的设计沿继性等优点,如今已成为电力电子学的一个重要研究方向。
SABER与控制系统仿真1. 应用背景1.1 为什么要使用控制系统仿真对于SABER强大的电路仿真功能我们已经有所了解,在模块电路中,我们的反馈控制方法通常比较简单,一般就是一些电阻和电容的组合,但是对更为复杂的控制模式,控制参数的定义难以用模拟电路组合实现,指标间的对应关系也不直观,应用控制系统仿真,便于直观理解以便优化指标,便于转化到数字实现(DSP),而且可以实现一些复杂的控制方式(例如三相系统中常用的静止和旋转的坐标变换)1.2 SABER在控制系统仿真的优势和制约优势: SABER作为混合仿真系统,可以兼容模拟,数字,控制量的混合仿真,便于在不同层面上分析和解决问题,其他仿真软件不具备这样的功能。
制约:不支持离散系统的频域分析,以及状态方程的分析方法。
1.3 控制系统仿真应用范围主要应用在变频器,UPS,以及未来的数字化电源系统的控制算法设计部分。
2. 基本方法2.1控制流原则在控制系统仿真中用到的模型有两个特点:1、它们都是无量纲的数值,不论电流,电压,速度,角度,在进行控制系统仿真之前都必须转化为无量纲的数字,因为对于控制处理机构而言,它只关心分析对象的数学行为,这是为了进行统一的分析。
2、信号流向是单相的,必须从一个模型的输出(out)口流入到另外一个模型的输入端口,不能颠倒。
而模拟电路器件的端口是不区分类别的,信号可以从断口流出也可以流入,只有正负号不同。
为了解释这个问题,我们看一个例子如下。
上图中左边和右边分别是一个RC并联电路在电路仿真和控制系统仿真中的描述,在控制系统中用一个积分环节表示电容,对于电路中的电容模型,我们可以以电压或者电流任何一个作为输入量求解另外一个,而在控制系统一旦确定模型方式,输入量就唯一确定,在该例子中选用积分环节,则输入只能是电流才能够描述电容行为,输入如果是电压量,则描述的就是一个电感了。
这也说明控制系统的模型具有普遍的应用性。
2.2 基本模型类别首先我们以一个例子来看看控制系统中常用的有哪些模型:这是一个双环控制的半桥PFC的控制模型仿真图,图中用虚线框住的部分为主电路等效,下面部分为控制电路等效。
其中包含模型如下:2.2.1 信号源模型:如图所示控制系统仿真中的信号源类型(例如正弦,三角)以及赋值方法与电路仿真中一样,不同的是两点:它只有一个输出端口,必须接到其他模型的输入端口,它无量纲,可以描述各种同样数学行为的物理量,比如正弦信号可以是电压也可以是电流。
2.2.2 信号结合模型:控制系统中最常见的就是对于信号进行比较,并对比较结果进行处理。
在这个例子中有以下模型左边的信号比较,右边的是信号相乘,这可能是控制系统分析中用的最多的两种型号结合方式,信号比较用于误差信号生成(和基准信号比较),信号相乘用于调制(PFC中的乘法器),SABER还提供了用于坐标变换的正弦信号结合,以后会介绍。
2.2.3 误差信号处理模型:这是SABER控制系统仿真中的核心部分,对于连续系统,和离散系统有不同类别,后面将以实例逐步介绍,这里先由下图简单说明一下图中右边的方框是一个PI调节器的模型,我们可以定义器比例和积分参数。
SABER还提供了微分滞后,以及由多项式定义的传递函数模型。
那个三角形是代表增益控制,以上属于线性控制。
最右边的是限幅函数,用于防止控制信号的溢出,属于非线性控制。
2.2.4 接口模型:在控制系统和模拟系统混合仿真的时候实现信号类型转换,后面介绍。
以上这些模型,均可以在器件模型库的“控制系统—〉连续函数”部分查找2.3 基本仿真方法应用控制系统模型仿真有什么好处呢?我们以其对应的模拟电路为例,见下图:这是一个UC3854控制的半桥PFC,运用控制系统平均模型的电路,有以下好处2.3.1在不影响分析对象的前提下速度大大提高上图是我们运用控制系统模型仿真的电感电流和输出电压,与模拟电路仿真结果基本一致,(由于是平均线性模型,也会有差异,例如纹波特性),但是速度只有模拟电路仿真的1/1000。
2.3.2分析对象明确,便于频域分析控制系统仿真对象是控制参数优化,速度的提高对于选择不同参数反复优化很有好处。
由于忽略了与控制无关环节的影响,查找问题也容易定位。
我们知道,开关电源是强非线性系统,是无法直接分析其频域特性的,而转化为控制系统模型,我们可以对其进行频域分析。
L 例如对下图的PI调节器其频域分析结果如下:对于带反馈,串联等更为复杂的控制环节,也有同样方法。
3. 应用实例与分析方法本章主要以一些实例,介绍如何根据设计需要,选择适当的控制系统仿真模型以及方法,并继续介绍一些常用模型。
3.1平均模型仿真还是以半桥PFC为例,如下图首先要明确的是:既然我们是控制系统仿真,那么分析的主要对象应该是系统的环路控制参数以及它们对于系统受控指标性能的影响。
举例来说,我们需要了解电流内环PI调节参数对于输出电压的影响,仿真则改变控制模型(图中红线处)中的Kp,Ki,仿真得到如下结果,可以看出不同PI参数组合的对于输出电压稳定时间和过冲的影响。
3.2 混合系统仿真平均模型仿真好处很多,但是也有一些制约因素,说明如下:回路建模难度较大:功率电路部分的主回路等效控制模型(图中虚线框内)模准确与否对于仿真结果很关键,通常做法是建立状态方程的基础上面画出其控制模型,过程与MatLab类似。
但是这要求对于拓扑和控制理论都有较好的理解,一般做法是查找相关文献资料。
不过一些不是很常用的拓扑,建模还是有一定难度的。
控制方式的影响未考虑:仍然以前图为例,在控制系统平均模型图中,M表示控制部分的输出信号,它调节功率电路的行为实现控制目标,具体实现通常是SPWM,这样M就应该理解为占空比,但是图中我们只是用它和电感电流相乘来获得输出电流,,调制过程和PWM信号没有体现出来,中间一些因素(如信号频率,开关速度,压降)的影响也无法体现。
因此很多时候,我们会使用混合系统仿真,如下图:和平均模型相比,控制部分是完全一致的,这里只介绍变更部分:主回路:由平均模型换成一个半桥BOOST电路。
spwm信号生成:包括三角波发生和PWM比较器,接口模型:在混合系统仿真中,如何实现不同物理量的统一运算?关键就是接口模型的运用,简单说明如下:图中左边是电压到控制转换模型,把电压量转换为无量纲的控制量,此外SABER还提供了电流,速度,转速等其他物理量到控制的转换模型,经过转换以后各种物理量就可以统一运算了。
图中右边是控制到电压转换名模型,可以理解为和上面模型的对偶,完成控制运算以后的控制量必须转换成为物理量,才能实现对模拟电路的控制。
需要注意的是模拟量的参考方向,与控制量的正负要对应。
上图显示了用平均模型和混合模型仿真的电感电流以及输出电压的对比,基本上是一致的,不同的是混合模型的波形中含有因为开关行为造成的高频分量。
3.3 离散系统仿真前面介绍的是连续系统的仿真,实际中,控制经常是用DSP实现的,很多控制方法和概念和连续系统也有差异,一些离散系统独有的特性(如零阶保持导致的信号延时)也会对控制效果发生影响,这个时候就要用到控制系统离散仿真的模型。
以下面单相逆变器的为例,介绍如何应用离散控制系统仿真:这是一个双环控制的逆变器,其中控制实现的关键部分是电压环和电流环的控制参数,这里是用一个传递函数模型表示的:如下图:这是一个连续控制系统的通用模型,通过传递函数形式表示控制特性,可以分子分母的阶数,多项式的系数,以及增益,以图中参数为例,则传递函数表示如下:H(s)=(500u*s+1)/(0.1m*s)其它高阶的拉普拉斯传递函数定义方法类推仿真结果如下输出电压波形:PWM信号发生部分:如果我们在离散系统中描述前面的逆变电路,仿真电路如下:(信号采样部分和控制部分)与连续系统相比,离散系统最大的特点就是信号是按照某个频率采样进行的,所以离散系统中的模型也都需要定义采样信号,可以分为以下几类1、信号源离散控制系统中的信号源类型和定义方法与连续系统一致,差异在于它们都有一个采样端子,通常接到一个时钟信号的输出,定义采样频率。
而他们输出波形也自然是采样形式的。
以右图的正弦信号源为例,其输出如下图。
(采样频率20K,局部波形)2、信号转换模拟到离散控制系统的转换接口模型有两个,如下图左边是模拟系统到离散控制系统转换模型,右边是离散控制系统到模拟系统转换模型,它们的定义与用法与联系系统转换模型基本一致,只是需要定义采样信号。
3、信号结合模型对信号进行各种数学运算的模型左边是信号相减,右边是信号相乘,用法与连续系统一致4、信号处理模型这是离散控制系统仿真中信号处理的模型,以Z变换多项式的方法来定义信号控制函数,以图中的模型为例,对应的传递函数是H(Z)=22.86*(1-0.94Z-1)/(1-Z-1)其它高阶系统类推。
因为离散信号处理与采样信号频率相关,这个模型上端就是采样信号端口,接到采样脉冲信号输出。
以上这些模型,均可以在器件模型库的“控制系统—〉采样数字系统”部分查找仿真结果如下输出电压SPWM发生部分可以看到PWM信号是采样形式的(采样频率20K),三角波采样频率(20Meg),这里看不出来。
如果降低三角波采样频率,例如降至500K,仿真得到输出电压波形如下:SPWM发生部分可以看到输出电压出现了严重畸变,这种问题是离散系统独有的,连续系统仿真是无法分析的。
3.4 三相系统控制仿真象在变频器,UPS或者其他的涉及三相电路控制中,仿真方法也是基本和前面一样,主要的问题在于三相系统控制需要坐标变换,由三相静止坐标变换到两相旋转坐标,然后和基准信号进行比较与控制,而误差放大信号再经过两相旋转到三相静止的反变换,去控制主电路的行为。
我们以下面的例子来说明:这是一个TD3000系列变频器的控制实现电路,图中已经用虚线框和文字表示了电路的基本结构,简单说明如下:电路的主回路部分:这是一个简化模型,从控制部分反馈的三相电压Ua,Ub,Uc,控制电机,并且完成电流采样(ia1,ib1,ic1)和速度采样(Speed)。
需要注意的是图形左边的控制到模拟接口模型必不可少。
当然实际中主回路一般适用的是spwm或者电压空间矢量控制的逆变桥来实现,这里关注于控制,简化以加快速度。
电流采样部分:这里主要是对采样的电流信号转换为电压值,并进一步通过接口模型转换为控制量。
坐标变换部分:这个就是实现坐标变换的模型,它完成两个功能:1、把采样的三相电流信号(ia,ib,ic)变换成为两相旋转坐标下的励磁电流(im_fed)和电枢电流(it_fed)。
2、把反馈控制的输出—两相旋转坐标下的电压信号um,ut转换为三相静止坐标下的电压ua,ub,uc,去控制电机。
坐标变换模型内部结构如下它是用一些信号运算的模型结合构造的,如信号乘积,相加,三角函数运算,很容易理解。