音圈电机位置伺服控制系统的研究
- 格式:pdf
- 大小:1.97 MB
- 文档页数:63
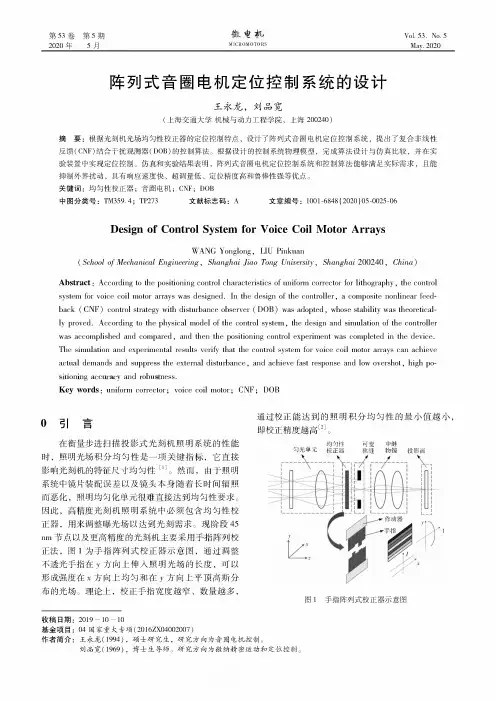
微电机MICROMOTORSVoe.53.No.5My. 2020第53卷第5期2020年 5月阵列式音圈电机定位控制系统的设计王永龙,刘品宽(上海交通大学机械与动力工程学院,上海200240)摘 要:根据光刻机光场均匀性校正器的定位控制特点,设计了阵列式音圈电机定位控制系统,提出了复合非线性反馈! CNF )结合干扰观测器(DOB )的控制算法。
根据设计的控制系统物理模型,完成算法设计与仿真比较,并在实验装置中实现定位控制。
仿 和 果表明,阵列式音圈电机定位控制系统和控制算法能够满足实际需求,且能 抑制外界扰动,具有响应速度快、超调量低、定位精度高和鲁棒性强等优点。
关键词:均匀性校正器;音圈电机;CNF ; DOB中图分类号:TM359. 4: TP273 文献标志码:A 文章编号:1001-6848(2020)05-0025-06Design of Control System for Voice Coii Motor ArraysWANG Yonglong , LIE Pinkuan(School of Mechanical Engineering , Shanghai Jiao Tong Unwerspy , Shanghai 200240, China )Abstract : According to W c positioning controS characte/stics of uniform correctoe foe lithosraphs ,W v controSsystem foe voico coii motoe aneys was designed. In the design of the controllee ,a composite nonlinear feed back (CNF) controS stmWvy with disturbanco observee ( DOB) was adopted ,whose swbility was thevreticel- ly proved . According to the physiccl model of the controS system ,the design and siculation of the contmVvrwas accomplished and compared ,and then the positioning controS expe/ment was completed in the devico.The sirnuition and experimental results e/m that the controS system for veico coii motoe arrays con achieve actual demands and suppress the externdl disturbanco ,and achieve fast response and low overshot ,high po- scoconcngaooueaosand eobusonKs.Key words : uniform corrector ; voico coii motor ; CNF ; DOBo 引言在衡量步进扫描投影式光刻机照明系统的性能时,照明光场积分均匀性是一项关 ,它直接影响光刻机的特 均匀性[1]$然而, 照明系统中镜片装配误差以及镜头本身随着长时间辐照而恶化,照明均匀化单元 接达到均匀性要求。
DSP和ARM的音圈电机伺服控制系统设计于地下金属矿设备精确定位与智能导航项目,拟通过二维激光定位和导航基站对地下金属矿设备进行精确定位和导航,音圈电机用于二维基站俯仰方向激光的定位和扫描。
系统除了要完成音圈电机的驱动控制,还需要完成水平方向电机的位置环控制算法,并与地下金属矿设备(以下简称上位机)之间进行以太网数据交换。
课题中,音圈电机的型号为VARS0022032~00A,主要参数如下:总行程为32°,最大输出转矩为0.22 N-m,最大电流为1.4 A,最大电压为15.5 V。
TMS320F28335 是32 位浮点型数字处理器,指令周期约为6.67 ns,适合复杂高速的计算。
STM32F107 是意法半导体的互联型系列微控制器产品,集成了很多高性能工业标准接口。
其中,包括两个12 位A/D(模数)转换器、1 个以太网10/100 Mbps MAC 模块、3 个SPI 接口。
系统中DSP 主要完成系统初始化、位置控制算法,ARM 主要完成PWM 波产生、A/D 采集控制、电流环计算、以太网通信、电机限位和过流保护,以及DSP 之间的数据交换等。
从DSP 的角度,ARM 可以看做是其协处理器。
系统控制功能划分图如图2 所示。
2.2 ARM 功能设计根据2.1 节中的功能划分,来介绍ARM 部分功能模块的设计。
2.2.1 PWM 模块设计STM320F107 具有一个16 位的可产生电机控制PWM 波的定时器,能设置死区时间,同时还能进行急停处理,因此采用STM320F107 定时器模块的增减计数器、比较寄存器和比较器来实现PWM 波的产生。
为了防止功率驱动电路中上下管直通造成电源短路,可以通过配置定时器模块的死区寄存器,在PWM信号中加入死区,使同相的上下桥臂驱动信号错开一个死区时间,防止功率器。
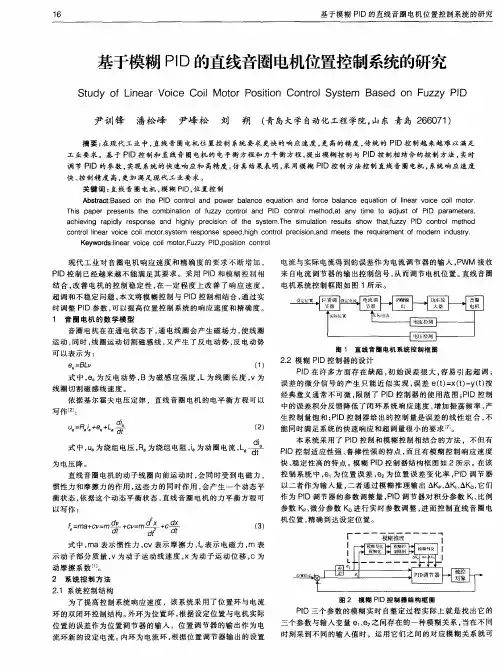
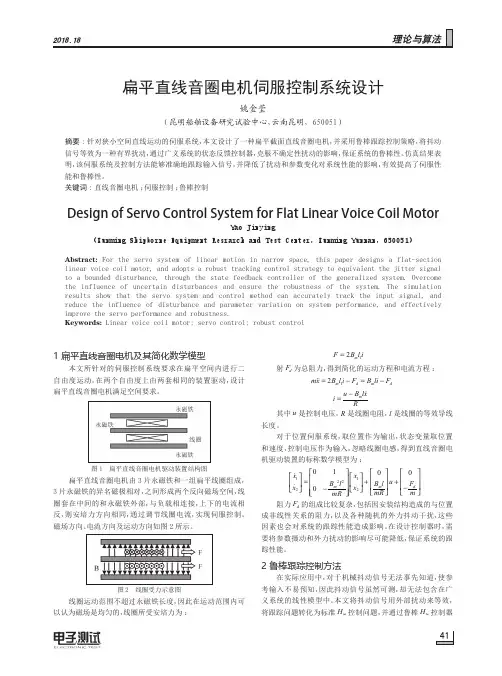
图1 音圈电机的三维结构图 图2 音圈伺服电机控制原理图2.2 电机驱动电路设计音圈电机伺服系统采用PWM方式调速立元件晶体管或者MOS管来搭建H己搭建的H桥电路不够稳定,发热量大H桥组件LMD18200[10],STM32输出的过H桥集成芯片LMD18200放大,进一步控制音圈电机的运动在本系统中,通过STM32F103VCT6信号包括PWM信号、DIR信号和BRANKE信号。
如图4所示为LMD18200的原理图。
3 音圈电机的控制策略“控制”可以定义为一个系统中一个或多个输出量产生影响的结果,其特征是开环作用路径,即控制链路。
“调节”是在一个系统中,对被调节量连续不断地进行检测,与基准量进行比较,并从与基准量平衡补偿的意义上对该被调量产生影响的过程,其特征是闭环作用路径,即调节回路。
音圈电机伺服控制采用两闭环控制,内环为速度流环,外环为位置环。
如图所示。
3.1 音圈电机速度环驱动器速度环以位置为调整目标,时刻检测音圈电机的位置信息,进而调整速度。
因为现实中电机准确定位,用固定占空比控制会导致电机速度随着负载的变化而变化。
选用MicroE 公司的光栅尺作为反馈回路的反馈传感器。
MicroEMTE系列微型读数头,增强型的分辨率0.5μm,标准型的分辨率为1μm。
对速度反馈量做PID算法占空比可以实现速度闭环。
如图6。
图3 STM32F103VCT6引脚图图4 LM18200T驱动原理图图5 控制回路结构原理图图6 速度环方框图图7 阶跃信号的响应曲线图8 速度曲线和位置曲线图9 速度和位置变化曲线6674ELECTRONIC ENGINEERING & PRODUCT WORLD2016.1的电量,就得到传送给输出的电荷量。
图 3 显示,输出超级电容器用 Midé V25W 换能器充电至 3.6V 。
输出超级电容器充电至 3.6V 大约需要 3300 秒时间。
图2 Midé V25W 给 18µF 输入电容充电,在 208ms 时间内从 4.48V 充电至 5.92V 图3 Midé 25W 给输出超级电容器充电至 3.6V图4 Midé 25W 使输出电容器从 2.5V 充电至 3.6V 图5 当振动源关断时,输出超级电容器放电。
基于DSP的伺服系统控制及定位问题的研究的开题报告一、研究背景及意义随着工业自动化的不断发展,伺服系统的应用越来越广泛。
DSP(数字信号处理)技术作为一个强大的计算处理平台,已经成为伺服系统控制的重要手段之一。
同时,定位是伺服系统的核心问题之一,对于提高系统性能和精度至关重要。
因此,基于DSP的伺服系统控制及定位问题的研究具有重要的理论和实践意义。
二、研究内容及研究方法本研究将以DSP作为控制平台,针对伺服系统控制和定位问题进行深入研究。
具体研究内容包括:1.伺服系统控制策略研究:针对不同的伺服系统,探讨不同的控制策略,包括PID控制、模糊控制、神经网络控制等。
2.伺服系统位置控制算法研究:对不同的伺服系统位置控制算法进行比较和分析,包括单轴位置控制、多轴联动位置控制等。
3.基于DSP的伺服控制系统硬件设计与实现:针对具体的伺服系统,设计和实现控制器的硬件系统,包括输入输出接口、数据采集器等。
4.伺服系统定位误差分析与解决方法研究:分析伺服系统的定位误差来源,针对不同的误差来源提出相应的解决方法。
研究方法主要包括理论分析、仿真研究和实验验证。
通过理论分析和仿真研究,得出伺服系统的控制策略、控制算法和定位误差源;通过实验验证,验证所得到的理论分析和仿真结果的正确性,以及硬件实现的可行性。
三、研究预期成果1.伺服系统控制策略、位置控制算法和定位误差分析的深入研究,为伺服系统设计和优化提供理论依据和参考。
2.实现基于DSP的伺服系统控制器硬件系统,并验证其可行性和稳定性,为伺服系统的应用提供具有实际意义的解决方案。
3.通过实验验证,进一步完善伺服系统的控制策略、控制算法和定位误差源的解决方案,提高伺服系统的控制精度和性能。
四、研究的重要性及难点伺服系统控制及定位问题是工业自动化中的关键问题,研究其控制策略和优化方法对于提高系统性能和精度具有重要意义。
基于DSP的伺服控制系统设计和实现在理论和实践方面都存在一些难点和挑战,需要充分考虑伺服系统的特点和应用要求,综合考虑控制策略、控制算法、硬件系统和软件系统等多个方面的因素,才能设计出稳定可靠的基于DSP的伺服控制系统。
无刷直流电机伺服控制系统的研究与设计的开题报告一、选题的背景和意义随着科学技术的不断发展,机械制造业、电子工程等领域的进步越来越快,无刷直流电机伺服控制系统也越来越受到重视。
无刷直流电机是以永磁体为转子,通过电子换向电路控制转子运动的一种电机类型。
与传统的有刷直流电机相比,无刷直流电机具有结构简单、效率高、寿命长以及噪音小等优点,因此在电动车、家电、工业自动化、机器人等领域得到广泛的应用。
伺服控制系统是指对运动目标进行追踪或者保持某种特定状态的控制系统,通常由传感器、控制器和执行器组成。
伺服控制系统在工业生产过程中,可以准确控制各种机械设备的位置、速度、角度等参数,有效提高了生产效率和质量。
因此,研究和设计一种高效可靠的无刷直流电机伺服控制系统,对于提高机械设备的运动精度和控制精度,优化生产效率和降低生产成本具有重要意义。
二、研究的内容和目标本课题主要研究和设计一种基于单片机的无刷直流电机伺服控制系统,主要包括以下内容:(1)大力率无刷直流电机的选型和参数配置,包括电机的额定电压、额定电流、转速和转矩等参数;(2)搭建无刷直流电机伺服控制系统实验平台,包括硬件设计和软件设计,主要包括控制器、电机驱动器、传感器等部分。
(3)进行无刷直流电机伺服控制系统的调试和优化,包括调试控制器的参数、设置伺服控制系统的PID参数、优化电机驱动器,使得控制系统具有更高的精度和可靠性。
三、研究的方法和步骤本研究采用以下的方法和步骤进行:(1)文献综述。
通过查阅相关的文献,了解无刷直流电机伺服控制系统的基本原理、组成结构和应用领域等方面的知识和经验,为后续的设计和分析提供理论基础。
(2)选型和参数配置。
根据实验要求,选择适合的无刷直流电机,配置相关参数。
(3)硬件设计。
搭建无刷直流电机伺服控制系统的实验平台,包括控制器、电机驱动器、传感器等部分。
(4)软件设计。
编写控制器程序,配置伺服控制系统的PID参数,进行控制器调试和优化。
基于DSP的音圈电机位置控制系统设计尹峰松;潘松峰;尹训锋【期刊名称】《工业控制计算机》【年(卷),期】2016(0)6【摘要】在深入了解音圈电机(VCM)结构及工作原理的同时,通过借鉴直流电机控制方式分析音圈电机的控制方法,从而保证音圈电机控制精度与控制稳定性。
以DSP TMS320F2812作为控制核心,采用双极性可逆PWM驱动电路作为驱动器,以高精度光栅尺作为位置检测装置,从而实现位置闭环控制,并以此搭建音圈电机位置控制系统。
在结合CCS3.3软件对位置控制算法进行优化的同时,实现DSP对音圈电机控制系统的实时监控。
%The core of this paper is based on the TMS320F2812,using the bipolar reversible PWM driver circuit as a driver,and the high precision grating ruler can be used as position detection device.Final y,position closed loop control can be built.【总页数】3页(P41-42,44)【作者】尹峰松;潘松峰;尹训锋【作者单位】青岛大学自动化工程学院,山东青岛 266071;青岛大学自动化工程学院,山东青岛 266071;青岛大学自动化工程学院,山东青岛 266071【正文语种】中文【相关文献】1.基于DSP的音圈电机数字驱动控制系统 [J], 王哲健;郑翔;李锋;俞梅2.基于DSP的正弦永磁同步电机位置控制系统设计 [J], 刘杰;孙辉;杨锟3.DSP和ARM的音圈电机伺服控制系统设计 [J], 罗颖;张维存;刘立4.基于模糊PID的直线音圈电机位置控制系统的研究 [J], 尹训锋;潘松峰;尹峰松;刘朔5.基于PID算法的音圈电机位置控制系统设计 [J], 汪月生;李伟因版权原因,仅展示原文概要,查看原文内容请购买。
电机控制系统中的位置伺服技术在现代工业自动化领域,电机控制系统起着至关重要的作用。
而位置伺服技术作为电机控制系统中的重要组成部分,更是发挥着关键性的作用。
本文将深入探讨电机控制系统中的位置伺服技术,从原理、应用以及发展趋势等方面进行详细阐述。
位置伺服技术是指利用反馈控制系统来实现对位置准确控制的技术。
在电机控制系统中,位置伺服技术可以实现对电机运动过程中位置的准确控制,使得电机可以按照预定的路径和速度进行运动,从而满足不同工业场景的需求。
在实际应用中,位置伺服技术被广泛应用于数控机床、机器人、自动化生产线等领域。
以数控机床为例,通过位置伺服技术可以实现对工件加工过程中的精确控制,提高加工精度和效率。
在机器人领域,位置伺服技术可以实现对机器人姿态和位置的精确控制,使机器人可以完成复杂的任务。
在自动化生产线上,位置伺服技术可以实现对输送带、装配机械等设备的精确定位,提高生产效率和质量。
随着工业自动化的不断发展,电机控制系统中的位置伺服技术也在不断创新和完善。
目前,随着传感器技术、控制算法等领域的进步,位置伺服技术在控制精度、响应速度、抗干扰能力等方面都有了显著提升。
未来,随着人工智能、物联网等新技术的应用,位置伺服技术将更加智能化和集成化,为工业自动化带来更多创新应用。
综上所述,电机控制系统中的位置伺服技术是一项非常重要的技术,它不仅可以提高电机控制系统的性能和可靠性,还可以为工业自动化带来更多创新机遇。
未来,随着技术的不断进步,位置伺服技术将在工业自动化领域发挥更加重要的作用,推动整个行业向着智能化、高效化的方向迈进。
位置伺服控制系统的开题报告一、研究背景位置伺服控制系统是广泛应用于机械控制领域的一种控制系统。
其主要功能是根据指令输入来调整机械系统的位置、速度和加速度等参数,使得机械系统能够按照预定轨迹运动。
这种控制系统在多种机械领域都有广泛应用,如数控机床、机器人等。
目前,位置伺服控制系统已经成为机械控制技术中的重要组成部分。
与传统控制系统相比,它具有精度高、响应速度快、稳定性好等优点。
但是,位置伺服控制系统中涉及的技术比较复杂,需要具备一定的电子、电气、机械等方面的知识,因此在实际应用过程中还存在一些问题和挑战。
二、研究内容本次研究将重点关注位置伺服控制系统中的几个关键技术,包括控制算法、系统信号处理、传感器反馈等。
具体来说,研究内容包括以下几个方面:(1)设计并实现位置伺服控制系统的硬件和软件平台。
(2)研究位置伺服控制系统中的控制算法,并选择合适的控制器进行实现和测试。
(3)探究位置伺服控制系统中的信号处理技术,包括低噪声、高精度的信号采集和处理等方面。
(4)研究位置伺服控制系统传感器反馈的应用技术,包括编码器、激光测距等多种传感器的选择、校准和应用等问题。
三、研究意义本次研究有以下几个方面的意义:(1)系统总结位置伺服控制系统的技术发展历程和现状,为相关领域的研究提供参考。
(2)深入研究控制算法、信号处理和传感器反馈等关键技术,提高控制系统的精度和稳定性。
(3)搭建硬件和软件平台,实现功能完备的位置伺服控制系统,并为实际应用提供技术支持。
四、研究方法本次研究主要采取理论分析、仿真实验和实际测试相结合的方法。
具体来说,研究方法包括以下几个环节:(1)对位置伺服控制系统的硬件和软件平台进行设计和搭建。
(2)模拟和分析位置伺服控制系统中的控制算法,并进行仿真实验。
(3)研究信号处理和传感器反馈技术,并进行实验测试。
(4)对实际应用中的位置伺服控制系统进行测试和优化。
五、预期结果本次研究的预期结果有以下几个方面:(1)完成一个基于硬件和软件的位置伺服控制系统。