计算机仿真试题及答案
- 格式:doc
- 大小:903.00 KB
- 文档页数:9
控制系统计算机辅助设计综合实验指导实验名称:连续与离散系统校正实验,系统可控性与可观性实验,系统的simulink仿真实验陈茜编实验人:苏建聪学号:200830810122班级:08电气工程及其自动化1班信息工程系实验任务书1. 有一个单位负反馈控制系统,如果控制对象的传递函数为设计要求:① 相角裕度≥45°;② 当系统的输入信号是单位斜坡信号时,稳态误差ess ≤0.04。
③ 要求绘制出校正后系统和未校正系统的Bode 图及其闭环系统的单位阶跃响应曲线,并进行对比。
2. 有一个单位负反馈控制系统,如果控制对象的传递函数为:试设计一个串联滞后校正装置。
设计要求:①相角裕度≥45°;② 当系统的输入信号是单位斜坡信号时,稳态误差ess ≤0.04。
③ 要求绘制出校正后系统和未校正系统的Bode 图及其闭环系统的单位阶跃响应曲线,并进行对比。
3. 有一个单位负反馈控制系统,如果控制对象的传递函数为 ()()4+=s s k s G p试设计一个串联超前滞后校正装置,设计要求: ①相角裕度≥45°;② 当系统的输入信号是单位斜坡信号时,稳态误差ess ≤0.04。
③ 要求绘制出校正后系统和未校正系统的Bode 图及其闭环系统的单位阶跃响应曲线,并进行对比。
4. 系统结构图如图所示,其中,采样周期Ts=0.01s ,被控对象()()110+=s s s G ,()s G h 为零阶保持器。
用W 变换法设计一超前校正装置D(z),使系统相位裕度γ≥50°,校验设计后系统的性能指标。
5. 系统结构图如图所示,其中,采样周期Ts=0.01s ,被控对象1)s(0.2s k )(+=s G ο,()s G h 为零阶保持器。
用对数频率法设计D(z),使系统开环增益k ≥30(1/s),截止频率ωc ≥15(1/s),相位裕度γ≥50 °1使 s 11se -1(s)-Tsh T G +≈=,求出未校正系统的开环系统的开环传递函数(s)(s)G G (s)0s =G ,的传递函数模型参数。
计算机仿真试题1.编写一个函数,使其能够产生如下的分段函数:错误!未找到引用源。
并调用此函数,绘制x=[0,+2]范围内的f(x)*f(x+2) 。
(10分)function y=f(x)if x<=2y=0.5*x;else if x>6y=0.5;else y=1.5-0.25*x;endendx=0:0.05:2;y= f(x)’*f(x+2));plot(x,y)图 1-12.已知4阶龙格-库塔算法如下:试利用该算法求解以下微分方程:(15分)本题可以调用MATLAB函数中龙格-库塔算法函数ode45,首先编写m文件:function dy=func(x,y)dy=-y+1;end再在主窗口调用此文件:[x,y]=ode45('func',[0,5],0)%这里的[0,5]为任取区间,表示方程在此范围的解。
运行结果如下:x =0.00010.00010.00020.00020.00050.00070.00100.00120.00250.00370.00500.00620.01250.01880.02510.0313 0.06270.09410.12550.15690.28190.40690.53190.65690.78190.90691.03191.15691.28191.40691.53191.65691.78191.90692.03192.15692.28192.40692.53192.65692.78192.90693.03193.15693.28193.40693.53193.65693.78193.90694.03194.15694.28194.40694.53194.65694.74274.82854.91425.0000y =0.00010.00010.00020.00020.00050.00070.00100.00120.0025 0.0037 0.0050 0.0062 0.0124 0.0186 0.0248 0.0309 0.0608 0.0898 0.1180 0.1452 0.2457 0.33430.41250.48160.54250.59630.64370.68550.72250.75510.78390.80930.83170.85150.86890.88430.89790.90990.92050.92980.93810.94540.95180.95740.96240.96690.97080.97420.97720.97990.98230.98430.98620.98780.98920.99050.99130.99200.99270.9933为只管起见,我们使用函数命令画出x-y(plot(x,y))的关系如下图:图1-23.用matlab语言求下列系统的状态方程、传递函数、零极点增益、和部分分式形式的模型参数,并分别写出其相应的数学模型表达式:(15分)(1)G(s)=324327242410355024s s ss s s s+++++++(2).X=2.25 -5 -1.25 -0.542.25 -4.25 -1.25 -0.2520.25 -0.5 -1.25 -121.25 -1.75 -0.25 -0.75 0X⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦uy= [0 2 0 2] X解:(1)a)求对应状态方程参数:num=[1 07 24 24]; den=[1 10 35 50 24]; [A,B,C,D]=tf2ss(num,den) 运行结果:A =-10 -35 -50 -241 0 0 00 1 0 00 0 1 0B =1C =1 7 24 24D =故,状态方程为:.X = x+ uY=[1 7 24 24]xb)求对应零极点增益模型参数:num=[1 07 24 24]; den=[1 10 35 50 24]; [Z,P,K]=tf2zp(num,den) 运行结果如下: Z =-2.7306 + 2.8531i -2.7306 - 2.8531i -1.5388P = -4.0000 -3.0000 -2.0000 -1.0000K = 1故变换后的零极点模型为: G(s)=c)求对应部分分式型:num=[1 07 24 24]; den=[1 10 35 50 24]; [R,P,H]=residue(num,den) 运行结果如下: R =4.0000 -6.0000 2.0000 1.0000P =-4.0000 -3.0000 -2.0000 -1.0000H = []故变换后的部分分式模型为:11223644)(+++++-+=s s s s s G(2)由题给条件,知:A=[2.25 -5 -1.25 -0.5; 2.25 -4.25 -1.25 -0.25;0.25 -0.5 -1.25 -1;1.25 -1.75-10 -35 -50 -24 1 0 0 0 0 1 0 0 0 0 1 010 0 0-0.25 -0.75] B=[4;2;2;0] C=[0 2 0 2],D=0 a)求传递函数矩阵: [num,den]=ss2tf(A,B,C,D) 运行结果为: num =0 4.0000 14.0000 22.0000 15.0000 den =1.0000 4.0000 6.2500 5.25002.2500 故,所对应传递函数模型为:25.225.525.641522144)(23423+++++++=s s s s s s s s Gb)求零极点模型:num=[0 4 14 22 15];en=[1 4 6.25 5.25 2.25]; [Z,P,K]=tf2zp(num,den) 运行结果为: Z =-1.0000 + 1.2247i -1.0000 - 1.2247i -1.5000 P =-1.5000 -1.5000 -0.5000 + 0.8660i -0.5000 - 0.8660iK =4.0000故,零极点模型为:)866.05.0()5.1()2247.11)(5.1(4)(2i s s i s s s G ±++±++=c)求对应部分分式模型: [R,P,H]=residue(num,den) 运行结果为: R =4.0000 -0.0000-0.0000 - 2.3094i -0.0000 + 2.3094iP =-1.5000 -1.5000 -0.5000 + 0.8660i -0.5000 - 0.8660iH = []故变换后的部分分式模型为:i s ii s i s s G 866.05.03094.2866.05.03094.25.14)(+++-+-++=4.已知一单位反馈系统开环传递函数为:,试绘制系统Nyquist图,判断闭环系统的稳定性,并求其单位阶跃响应。

计算机仿真试题A 参考答案四、程序设计与算法题1. (只要是完成题目要求的程序都可以得分)(a)I=imread('flowers.jpg');J=imadd(I,50);K=immultiply(J,0.7);subplot(1,2,1), subimage(I);subplot(1,2,2),subimage(K);(b)I=imread(‘flowers.jpg’);J=imresize(I,1.2);K=imrotate(J,-45,’bilinear’,’crop’);subplot(131),subimage(I);subplot(132),subimage(J);subplot(133),subimage(K);(c)I=imread('flowers.jpg');[x,y,z]=cylinder;warp(x,y,z,I);J=rgb2gray(I);figure,imshow(J);2.主要算法流程如下:程序代码:%Example of PCA analysisclear all, close all;N=1000;fs=500;w=(1:N)*2*pi/fs;t=1:N;x=0.75*sin(w*5);y=sawtooth(w*7,0.5);D(1,:)=.5*y+.5*x+.1*rand(1,N);D(2,:)=.2*y+.7*x+.1*rand(1,N);D(3,:)=.7*y+.2*x+.1*rand(1,N);D(4,:)=-.6*y+-.24*x+.2*rand(1,N);D(5,:)=.6*rand(1,N);plot(t,D(1,:)+0,t,D(2,:)+2,t,D(3,:)+4,t,D(4,:)+6,t,D(5,:)+8);figure;for i=1:5D(i,:)=D(i,:)-mean(D(i,:));end[U,S,pc]=svd(D,0);pc=pc(:,1:5);for i=1:5pc(:,i)=pc(:,i)*sqrt(eigen(i));endfigure;plot(t,pc(:,1)-2,t,pc(:,2)+2);3(a)(注意这里n=4), As x =得:x As 1-= (b )流程图类似于上题,但注意这里已经有了混合信号,所以无需产生;并且是用ICA 进行分析。
第一章1.计算机仿真系统的三要素()答案:计算机、模型、系统2.系统研究一般有哪些方法()答案:仿真实验法;理论解析法;直接实验法3.哪些是以硬件为基础的仿真软件( )答案:Proteus4.欠实时仿真,仿真时钟比实际时钟慢。
例如烟火爆炸的仿真分析。
答案:对5.计算机仿真算法的误差主要有()答案:截断误差;舍入误差第二章1.MATLAB软件中,下面哪个命令是用来显示当前文件夹中文件名字的()答案:what2.下面这些哪个是属于元素群运算(点运算)()答案:exp(x)3.哪个是以硬件为基础的仿真软件( )答案:Proteus4.MATLAB是(矩阵实验室),其基本变量是矩阵,其数值元素的格式只有双精度(double)这种形式存在于MATLAB的workpace空间中。
答案:错5.在MATLAB中,运行以下代码,b的结果是()a=[1,0;1,0];b=all(a)答案:[1,0]第三章1.MATLAB中代码文件中边表明文件为函数文件的关键字是()答案:function2.在MATLAB的命令窗口中,运行以下代码,b的结果是()a=[1,0,1,0];forn=ax=n(1)&n(2);end答案:出现错误提示3.在MATLAB的fig窗口中,可以直接打开以下()格式的图形文件答案:fig4.在MATLAB中,对于m函数文件,下面的描述不正确的是()答案:m函数文件是不能够被simulink来调用的5.全局变量是共有变量,在函数文件中不能够直接访问,需要设置一个输入参数才能访问。
答案:错第四章1.以下说法不正确的是()答案:不同幂次的两个多项式不能进行乘法运算2.当实验或测试所获得的样本数据有误差时,适合用来估算数据的方法是()答案:曲线拟合3.若在MATLAB中已有语句a=sym(1); b=1; x=sym('b'),则以下叙述正确的是()答案:a是符号常量,x是符号变量4.若使用命令taylor(f,x,1,'Order',6)对f进行泰勒展开,则展开式的最高阶为()答案:55.在命令行窗口输入下列命令,则命令执行后的输出结果是()>>f=sym(1);>> eval(int(f,1,4))答案:3第五章1.启动Simulink的方法有()答案:在命令行窗口中输入simulink命令;在“主页”选项卡中单击“文件”命令组中的“新建”命令按钮;在“主页”选项卡中单击SIMULINK命令组中的“Simulink”命令按钮2.在一个模型窗口上按住一个模块并同时按Shift键移动到另一个模型窗口,则()答案:在两个模型窗口都有这个模块3.为子系统定制参数设置对话框和图标,使子系统本身有一个独立的操作界面,这种操作称为子系统的()答案:封装4.已知仿真模型如图所示,各模块参数均采用默认设置,则示波器的输出波形是()答案:5.以下关于S函数的描述中,正确的有()答案:S函数有现成的模板程序;S函数模块能够被封装;利用S函数可以对Simulink模块库进行扩充第六章1.下列对象中,哪一个不属于MATLAB控制系统工具箱中规定的LTI对象?()答案:极点留数对象2.tf2zpk函数的作用是?()答案:零极点增益模型转换为状态空间模型3.在MATLAB命令窗口运行如下代码,返回结果为:()>>sys = drss(3,4);isct(sys)答案:14.求系统sys的阶跃相应,返回系统的输出和状态,step函数的调用格式为:()答案:[y,t,x]=step(sys)5.给定开环系统模型作波特图,频率向量w自动给出,作波特图,并在图上标注幅值裕度Gm和对应的频率wg,相位裕度Pm和对应的频率wp,所用函数及调用格式为:()答案:margin(sys)第七章1.在MATLAB的m文件中,可以将滞后环节转化为有理数形式的函数是?()答案:pade2.在simulink中,有多种PID模块,其中下面哪一个是离散的PID模块()答案:;3.在MATLAB的m文件中,LTI对象中属于滞后特征的属性是( )答案:Outputdelay;IOdelay;Inputdelay4.simulink中,PID模块中的只有Kp,Ki,Kd三个参数可以设置。
计算机仿真技术考试试题(安徽建筑工业学院)1-1 仿真遵循的基本原则是什么?相似原理 1 - 2龙格-库塔的思想(省略) 1、简述计算机仿真的基本步骤。
答:(1)根据仿真目的确定仿真方案;(2)建立系统的数学模型;(3)选择合适仿真方法,建立仿真模型;(4)编写仿真程序并进行程序调试;(5)进行仿真实验;(6)仿真结果分析。
2、试比较数值积分法与离散相似法的区别。
答:数值积分法:比较成熟,精度较高,计算公式复杂,计算量大,适合离线仿真;离散相似法:计算公式简单,计算量小,速度快,精度较数值积分法低,适合在线仿真。
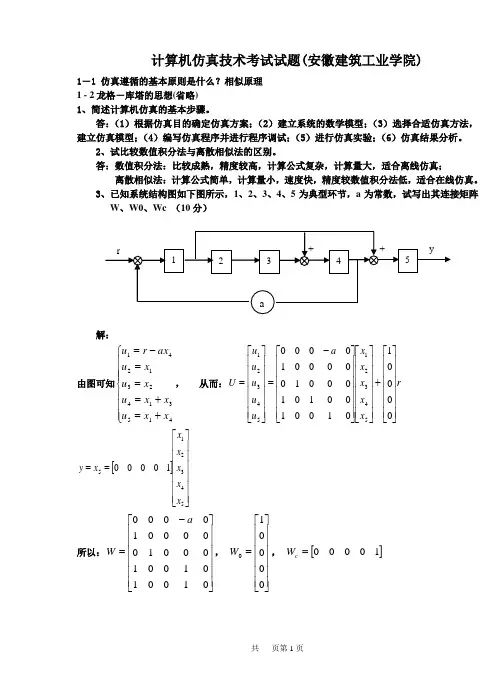
3、已知系统结构图如下图所示,1、2、3、4、5为典型环节,a 为常数,试写出其连接矩阵W 、W0、Wc (10分)解:由图可知⎪⎪⎪⎩⎪⎪⎪⎨⎧+=+===-=415314231241x x u xx u x u xu ax r u , 从而:r x x x x x a u u u u u U ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=000010100100101000100000100005432154321[]⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡==54321510000x x x x x x y所以:⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-=01001010*******000010000a W , ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=000010W , []10000=c W4、已知系统状态空间表达式为[]⎪⎪⎩⎪⎪⎨⎧=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=Xt y t u X X 01)()(012101 ,⎥⎦⎤⎢⎣⎡=11)0(X ,计算步长1.0=h ,输入信号1=u (0≥t )试采用欧拉法,四阶龙格-库塔法计算h t =时对应的y 值。
(12分)解:⎥⎦⎤⎢⎣⎡=11)0(X ,⎥⎦⎤⎢⎣⎡=2101A ,⎥⎦⎤⎢⎣⎡=01B ,[]01=C 欧拉法:()()⎥⎦⎤⎢⎣⎡=⋅⎪⎪⎭⎫⎝⎛⋅⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=++⎥⎦⎤⎢⎣⎡=+=3.12.11.010*********)0()0(11))0(,0()0()(h Bu AX hX f X h X 2.1)()(==h CX h y 四阶龙格-库塔法: ()⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡==3201112101)0(,01X f K ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡+⎪⎪⎭⎫ ⎝⎛⎥⎦⎤⎢⎣⎡⋅+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎪⎭⎫⎝⎛⋅++=4.31.2013221.011210121.0)0(,21.0012K X f K⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡+⎪⎪⎭⎫ ⎝⎛⎥⎦⎤⎢⎣⎡⋅+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎪⎭⎫⎝⎛⋅++=445.3105.2014.31.221.011210121.0)0(,21.0023K X f K()⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡+⎪⎪⎭⎫ ⎝⎛⎥⎦⎤⎢⎣⎡⋅+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⋅++=8995.32105.201445.3105.21.01121011.0)0(,1.0034K X f K()⎥⎦⎤⎢⎣⎡=++++=3432.12103.1226)0()(4321K K K K hX h X 2103.1)()(==h CX h y5、已知系统传递函数)1(2)()()(+==s s s U s Y s G ,试采用双线性变换法求解系统差分方程,计算步长h =0.1s (10分)。
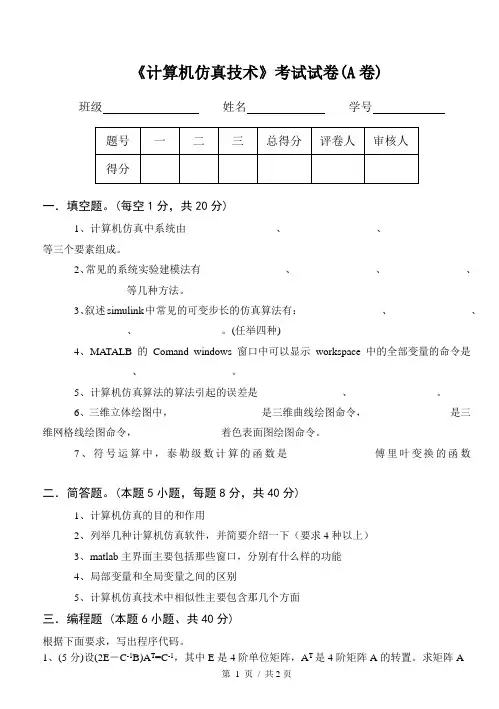
《计算机仿真技术》考试试卷(A卷)班级姓名学号一.填空题。
(每空1分,共20分)1、计算机仿真中系统由_________________、_________________、________________等三个要素组成。
2、常见的系统实验建模法有________________、________________、________________、________________等几种方法。
3、叙述simulink中常见的可变步长的仿真算法有:________________、________________、________________、________________。
(任举四种)4、MA TALB的Comand windows窗口中可以显示workspace中的全部变量的命令是_________________、_________________。
5、计算机仿真算法的算法引起的误差是________________、________________。
6、三维立体绘图中,________________ 是三维曲线绘图命令,________________是三维网格线绘图命令,________________着色表面图绘图命令。
7、符号运算中,泰勒级数计算的函数是________________傅里叶变换的函数________________二.简答题。
(本题5小题,每题8分,共40分)1、计算机仿真的目的和作用2、列举几种计算机仿真软件,并简要介绍一下(要求4种以上)3、matlab主界面主要包括那些窗口,分别有什么样的功能4、局部变量和全局变量之间的区别5、计算机仿真技术中相似性主要包含那几个方面三.编程题 (本题6小题、共40分)根据下面要求,写出程序代码。
1、(5分)设(2E-C-1B)A T=C-1,其中E是4阶单位矩阵,A T是4阶矩阵A的转置。
求矩阵A2、(5分)输入下面的矩阵,求出特征多项式和特征根,并求出特征多项式的微分。
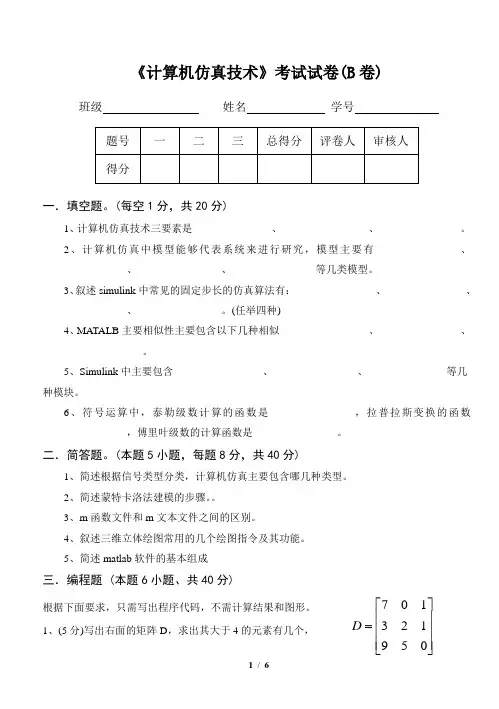
《计算机仿真技术》考试试卷(B 卷)班级 姓名 学号一.填空题。
(每空1分,共20分)1、计算机仿真技术三要素是_______________、_________________、________________。
2、计算机仿真中模型能够代表系统来进行研究,模型主要有________________、________________、________________、________________等几类模型。
3、叙述simulink 中常见的固定步长的仿真算法有:________________、________________、________________、________________。
(任举四种)4、MATALB 主要相似性主要包含以下几种相似_________________、________________、___________________。
5、Simulink 中主要包含_________________、________________、_______________等几种模块。
6、符号运算中,泰勒级数计算的函数是________________,拉普拉斯变换的函数________________,傅里叶级数的计算函数是________________。
二.简答题。
(本题5小题,每题8分,共40分)1、简述根据信号类型分类,计算机仿真主要包含哪几种类型。
2、简述蒙特卡洛法建模的步骤。
3、m 函数文件和m 文本文件之间的区别。
4、叙述三维立体绘图常用的几个绘图指令及其功能。
5、简述matlab 软件的基本组成三.编程题 (本题6小题、共40分)根据下面要求,只需写出程序代码,不需计算结果和图形。
1、(5分)写出右面的矩阵D ,求出其大于4的元素有几个,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=059123107D并通过变量列出其在矩阵的位置和序号2、(5分)求解下面矩阵A 的行列式和逆矩阵,并利用命令取出系数矩阵的逆矩阵的第二行的数据,以小数点后面两位数值的形式显示出来。
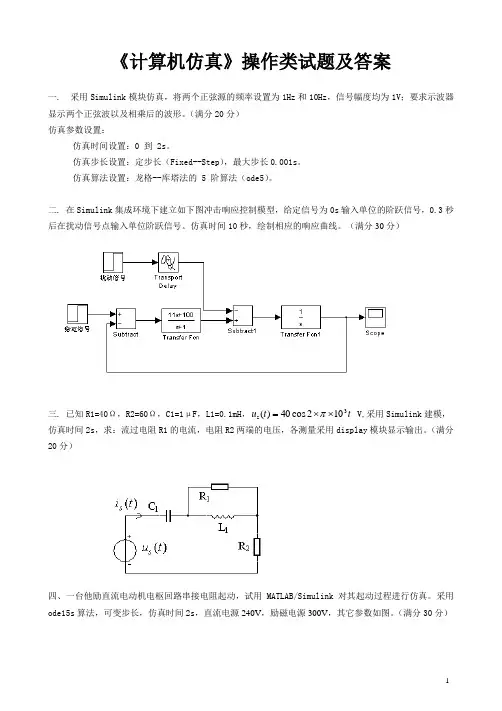
《计算机仿真》操作类试题及答案
一. 采用Simulink 模块仿真,将两个正弦源的频率设置为1Hz 和10Hz ,信号幅度均为1V ;要求示波器显示两个正弦波以及相乘后的波形。
(满分20分) 仿真参数设置:
仿真时间设置:0 到 2s 。
仿真步长设置:定步长(Fixed--Step ),最大步长0.001s 。
仿真算法设置:龙格--库塔法的 5 阶算法(ode5)。
二. 在Simulink 集成环境下建立如下图冲击响应控制模型,给定信号为0s 输入单位的阶跃信号,0.3秒后在扰动信号点输入单位阶跃信号。
仿真时间10秒,绘制相应的响应曲线。
(满分30分)
三. 已知R1=40Ω,R2=60Ω,C1=1μF ,L1=0.1mH ,t t u 3
s 102cos 40)(⨯⨯=π V,采用Simulink 建模,
仿真时间2s ,求:流过电阻R1的电流,电阻R2两端的电压,各测量采用display 模块显示输出。
(满分20分)
四、一台他励直流电动机电枢回路串接电阻起动,试用MATLAB/Simulink 对其起动过程进行仿真。
采用ode15s 算法,可变步长,仿真时间2s ,直流电源240V ,励磁电源300V ,其它参数如图。
(满分30分)
可以设置这台直流电机的各种参数:
起动器子系统,连接端口1、2采用connection port封装:
答案:
一. 仿真模型:
仿真结果:
二. 仿真模型:
仿真结果:
三.仿真结果:
四.仿真模型:
仿真结果:。
期末仿真测试题及答案第一部分:选择题1. 下列哪项不属于计算机的基本组成部分?A. 输入设备B. 输出设备C. 控制器D. 电源部分答案:D2. 执行非常重要的基本计算操作,如加法、减法、乘法和除法等,是由计算机中的哪个部分负责的?A. 存储器B. 输入设备C. ALU(算术逻辑单元)D. 控制器答案:C3. 下列哪个操作系统是开源的?A. WindowsB. macOSC. LinuxD. iOS答案:C4. 下列哪种数字编码是计算机内部使用的?A. ASCII码B. UnicodeC. EBCDIC码D. BCD码答案:C5. 在计算机中,1KB等于多少字节?A. 1024B. 1000C. 100D. 10答案:A6. “www”代表的是什么?A. 网络B. 万维网C. 万维网服务D. 网页答案:B7. 下列哪项是计算机病毒的特点?A. 生成自身的复制品B. 可以感染其他计算机文件C. 可以改变计算机的正常运行状态D. 所有选项都是答案:D8. 在计算机术语中,什么是“CPU”?A. 中央处理器B. 计算机存储器C. 输出设备D. 主板答案:A9. 下列哪个不是数据库管理系统?A. MySQLB. OracleC. LinuxD. SQL Server答案:C10. 下列哪项不是网络拓扑结构?A. 总线型B. 星型C. 环型D. 布线型答案:D第二部分:简答题1. 请简述操作系统的作用。
答案:操作系统是计算机系统中的一种重要软件,它是用户与计算机硬件之间的接口,承担着对计算机硬件资源的管理和调度工作,提供了一种可靠、高效、方便的计算环境。
操作系统负责管理计算机的内存、文件系统、进程和设备等,保证计算机的正常运行,并提供各种服务,如用户界面、网络通信、安全性控制等。
2. 请简述HTTP和HTTPS的区别。
答案:HTTP(超文本传输协议)和HTTPS(安全超文本传输协议)都是用于网络通信的协议,但它们有一些区别。
一、数值计算,编程完成以下各题(共20分,每小题5分) 1、脉冲宽度为d ,周期为T 的矩形脉冲的傅里叶级数如下式描述:)2cos(/)/sin(21[)(1τπππτn T d n T d n T d f n ∑∞=+=当150=n ,41=T d ,2/12/1<<-τ,绘制出函数)(τf 的图形。
解: syms n t;f=((sin(n*pi/4))/(n*pi/4))*cos(2*pi*n*t); s=symsum(f,n,1,150); y=(1+2*s)/4; x=-0.5:0.01:0.5; Y=subs(y,'t',x); plot(x,Y)2、画出函数5505.025.55.15.1cos 5)5(sin )(2x x x x ex x f x +++-=在区间[3,5]的图形,求出该函数在区间[3, 5]中的最小值点m in x 和函数的最小值m in f .解:程序如下 x=3:0.05:5;y=(sin(5*x).^2).*exp(0.05*x.^2)-5*(x.^5).*cos(1.5*x)+1.5*abs(x+5.5)+x.^2.5; mix_where=find(y==min(y)); xmin=x(mix_where); hold on; plot(x,y);plot(xmin,min(y),'go','linewidth',5);str=strcat('(',num2str(xmin),',',num2str(min(y)),')'); text(xmin,min(y),str); Xlabel('x')Ylabel('f(x)')经过运行后得到的图像截图如下:运行后的最小值点m in x =4.6,m in f = -8337.86253、画出函数xe x xf x 5.2cos )(3.02-⋅=-在[1,3]区间的图形,并用编程求解该非线性方程0)(=x f 的一个根,设初始点为20=x .解: x=1:0.02:3; x0=2;y=@(x)(cos(x).^2).*exp(-0.3*x)-2.5*abs(x); fplot(y,[1,3]); Xlabel('x') Ylabel('f(x)')X1=fzero('(cos(x).^2).*exp(-0.3*x)-2.5*abs(x)',x0)运行后求得该方程的一个根为z=0.3256。
习题3
1、已知系统响应函数为)sin(11)(θ+-=-bt e b
t y bt ,其中21l b -=,)1arctan(2
l
l -=θ,要求用不同的线型或颜色,在同一张图上绘制l 取值为0.2,、0.4、0.6、0.8时,系统在[]18,0∈t 区间内的响应曲线,并要求用2.0=l 和8.0=l 对它们相应的两条曲线进行文字标志。
答:刚开始因为没有考虑到相乘或相除矩阵的维度而总出错,后来理解清楚之后就简单多了。
编写程序如下:
得到结果:
2、用plot
3、mesh 、surf 指令,绘制2222)1()1(1y x y x z ++++-=
三维图(x 、y 范围自定)。
答:用plot3时,我定义]100,0[∈x ,]100,0[∈y ;并分别令22)1(y x a +-=,22)1(y x b ++=。
同时需注意将1变换成与a 、b 同维的矩阵。
得到结果:
在利用mesh、surf绘图时,为了图形美观取]
x,x=y.
[-
∈
100
,
100
程序如下:
得到结果:
3、对向量t进行以下运算可以构成3个坐标的值向量:)
y=,
cos(t
x=,)
sin(t
z=。
利用plot3指令,并选用绿色的实线绘制相应的三维曲线。
t
答:取pi
:0(
:1.0
=。
注意绿色是‘g’。
编写程序如下:
t*
)
10
得到结果:。
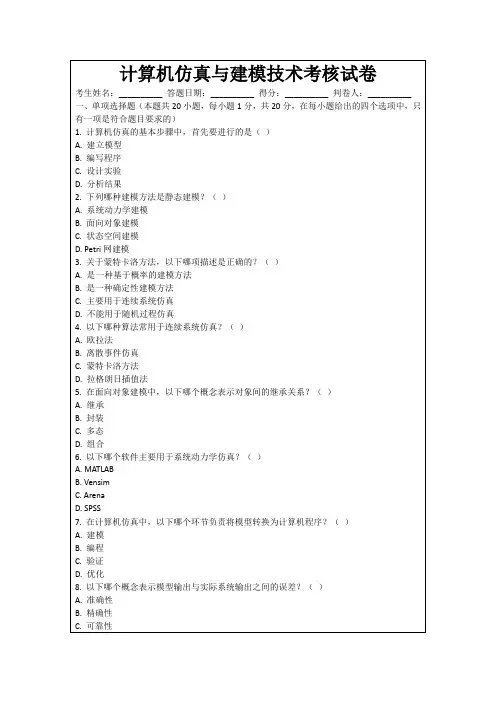
计算机仿真与建模考试试题一、单项选择题1. 在计算机仿真与建模中,以下哪个软件是用于创建和模拟三维计算机图形的?A. MATLABB. AutoCADC. SolidWorksD. 3ds Max2. 计算机仿真与建模常用的数学建模方法有哪些?A. 微分方程建模B. 蒙特卡洛模拟C. 神经网络模型D. 遗传算法优化3. 下面哪个软件是用于分析流体和气体流动的计算机仿真工具?A. ANSYSB. CATIAC. Pro/ENGINEERD. PTC Creo4. 在计算机仿真中,有哪些常见的物理模型?A. 质点模型B. 弹簧-质点模型C. 流体模型D. 电路模型5. 计算机仿真与建模的主要应用领域是什么?A. 机械工程B. 航空航天C. 生物医学D. 所有以上领域二、简答题1. 什么是计算机仿真与建模?计算机仿真与建模是指使用计算机技术和数学方法对现实世界的问题或系统进行建模和模拟实验的过程。
通过对系统各个组成部分的特性进行数学描述和计算机编程实现,可以模拟真实系统的行为,并进行虚拟实验和预测。
2. 计算机仿真与建模的主要步骤是什么?计算机仿真与建模的主要步骤包括:问题建模与分析、数学建模、软件工具选择与开发、模型验证与调试、模拟实验与结果分析等。
3. 计算机仿真与建模的优势有哪些?计算机仿真与建模具有以下优势:- 可以对复杂系统进行全面、高效的分析和研究,避免了大量实际实验和浪费资源;- 提供了研究系统性能、优化设计和决策支持的基础;- 可以预测系统行为并进行虚拟实验,帮助解决实际问题和提高生产效率;- 提供了客观、可重复的实验环境,方便对结果进行验证和比较。
4. 计算机仿真与建模的应用范围有哪些?计算机仿真与建模广泛应用于工程领域,包括机械工程、电气工程、航空航天、建筑工程等。
此外,它还在生物医学、交通运输、环境科学等领域有重要应用。
三、综合题某工程团队需要设计一种新型的风力发电机,用于发电和供电给一个小型城市。
计算机仿真技术试题含完整答案⼀、数值计算,编程完成以下各题(共20分,每⼩题5分) 1、脉冲宽度为d ,周期为T 的矩形脉冲的傅⾥叶级数如下式描述:)2cos(/)/sin(21[)(1τπππτn T d n T d n T d f n ∑∞=+=当150=n ,41=T d ,2/12/1<<-τ,绘制出函数)(τf 的图形。
解: syms n t;f=((sin(n*pi/4))/(n*pi/4))*cos(2*pi*n*t); s=symsum(f,n,1,150); y=(1+2*s)/4; x=-0.5:0.01:0.5; Y=subs(y,'t',x); plot(x,Y)2、画出函数5505.025.55.15.1cos 5)5(sin )(2x x x x ex x f x +++-=在区间[3,5]的图形,求出该函数在区间[3, 5]中的最⼩值点m in x 和函数的最⼩值m in f .解:程序如下 x=3:0.05:5;y=(sin(5*x).^2).*exp(0.05*x.^2)-5*(x.^5).*cos(1.5*x)+1.5*abs(x+5.5)+x.^2.5; mix_where=find(y==min(y)); xmin=x(mix_where); hold on; plot(x,y);plot(xmin,min(y),'go','linewidth',5);str=strcat('(',num2str(xmin),',',num2str(min(y)),')'); text(xmin,min(y),str); Xlabel('x')Ylabel('f(x)')经过运⾏后得到的图像截图如下:运⾏后的最⼩值点m in x =4.6,m in f = -8337.86253、画出函数xe x xf x 5.2cos )(3.02-?=-在[1,3]区间的图形,并⽤编程求解该⾮线性⽅程0)(=x f 的⼀个根,设初始点为20=x .解: x=1:0.02:3; x0=2;y=@(x)(cos(x).^2).*exp(-0.3*x)-2.5*abs(x); fplot(y,[1,3]); Xlabel('x') Ylabel('f(x)')X1=fzero('(cos(x).^2).*exp(-0.3*x)-2.5*abs(x)',x0)运⾏后求得该⽅程的⼀个根为z=0.3256。
计算机仿真测试题及答案1. 选择题1.1 下列关于计算机仿真的定义,哪个是正确的?A. 计算机仿真是通过使用计算机来模拟现实世界的过程和现象B. 计算机仿真是通过使用计算机来生成虚拟的3D图像C. 计算机仿真是通过使用计算机来进行数据分析和统计D. 计算机仿真是通过使用计算机进行编程和软件开发答案:A1.2 计算机仿真的主要应用领域是:A. 电影和游戏制作B. 数据分析和统计C. 空气动力学和流体力学D. 软件开发和编程答案:C1.3 以下哪个是计算机仿真的一个重要优点?A. 精确模拟现实世界的过程和现象B. 速度快,可以实时进行模拟C. 不需要消耗大量的计算资源D. 可以替代真实的实验和测试答案:D2. 填空题2.1 计算机仿真可以帮助工程师在设计阶段进行 __________ 和__________。
答案:分析,优化2.2 计算机仿真可以用于预测产品在不同环境条件下的 __________和 __________。
答案:性能,行为2.3 在计算机仿真中,模型是对现实世界中的对象或系统进行的一个 __________ 描述。
答案:数学3. 简答题3.1 请简要解释计算机仿真的工作原理。
答案:计算机仿真的工作原理是基于数学模型和计算机算法。
首先,根据需要模拟的对象或系统的特性,工程师会构建一个数学模型,用来描述该对象或系统的行为。
然后,使用计算机算法对这个数学模型进行求解和模拟。
算法会根据初始条件和输入参数,计算出模拟过程中的各个时间点上的状态和输出结果。
最后,通过可视化等方式,将仿真结果呈现给使用者。
3.2 计算机仿真的主要应用领域有哪些?请举例说明。
答案:计算机仿真的主要应用领域包括航空航天、汽车工程、建筑设计、电子电路设计等。
例如,在航空航天领域,工程师可以使用计算机仿真来模拟飞机或火箭在不同高度、速度和气候条件下的飞行行为,以评估其性能和安全性。
在建筑设计领域,可以使用计算机仿真来模拟建筑物在地震或风暴等自然灾害中的响应,以提前预防和减少损失。