机械设计基础机构的结构分析
- 格式:pdf
- 大小:3.66 MB
- 文档页数:65
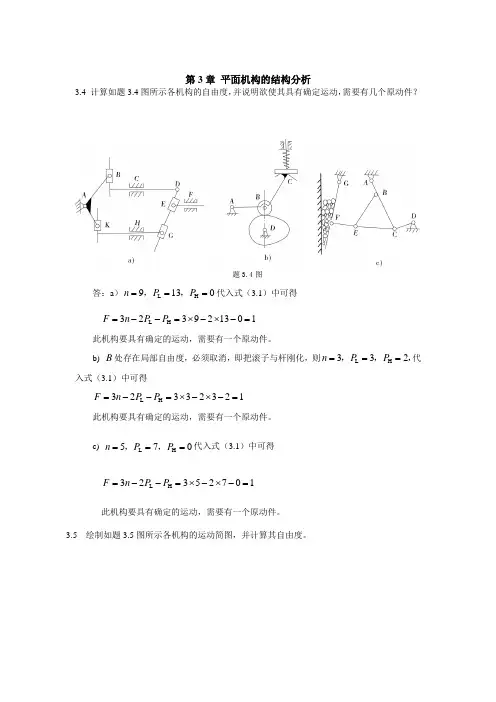
机械设计基础机械结构的刚度与强度分析在机械设计的过程中,结构的刚度和强度是两个非常重要的参数。
刚度是指结构对外界力的抵抗能力,而强度则是指结构在受到力的作用下是否会发生破坏。
本文将对机械结构的刚度与强度进行详细的分析。
一、刚度分析机械结构的刚度是指结构在受力作用下的变形能力。
刚度越高,结构的变形越小,反之则变形越大。
在机械设计中,刚度的计算和分析是非常重要的,它直接关系到结构的稳定性和工作性能。
1.1 弹性变形结构在受到力的作用下,会发生弹性变形。
弹性变形是结构的一种可逆变形,当外力消失时,结构会恢复原始形状。
刚度的计算就是通过分析结构在弹性变形过程中的力学特性来完成的。
1.2 刚度的计算方法常见的刚度计算方法有等效刚度法和有限元分析法。
等效刚度法是一种简化的计算方法,适用于结构较为简单的情况。
有限元分析法则较为精确,可以考虑结构的复杂性。
1.3 刚度与结构设计在机械结构设计中,刚度的要求会根据具体应用来确定。
一般来说,对于需要保持形状和位置不变的结构,刚度要求较高;而对于需要发生变形的结构,刚度要求可以适度降低。
二、强度分析机械结构的强度是指结构在受到力作用下不会发生破坏的能力。
强度分析是机械设计中必不可少的一步,它可以保证结构在正常工作条件下的安全性。
2.1 强度与材料特性结构的强度与所采用的材料有直接关系。
不同类型的材料具有不同的强度特性,例如金属材料的强度主要依赖于其抗拉强度和屈服强度。
在强度分析中,需要考虑结构所受到的最大力和所能承受的最大应力之间的关系。
2.2 强度计算方法常用的强度计算方法有等效应力法和有限元分析法。
等效应力法通过将结构的应力状态转化为等效应力的形式,然后与材料的强度特性进行比较来判断结构的安全性。
有限元分析法则可以更加精确地分析结构的应力和变形情况。
2.3 安全系数在强度分析中,通常会引入安全系数来保证结构的可靠性和安全性。
安全系数是指结构所能承受的最大力与实际所受力之间的比值。

机械设计基础学习如何进行机械结构的强度分析在机械设计中,强度分析是一个基础而关键的环节。
机械结构的强度分析可以帮助工程师评估和验证设计方案的可靠性,从而确保机械设备在正常工作时不会发生失效和损坏。
下面将介绍机械设计基础学习中如何进行机械结构的强度分析。
1. 强度分析的基本概念和原理在进行机械结构的强度分析之前,首先需要了解一些基本概念和原理。
强度分析是指通过计算和仿真等方法,对机械结构在受力情况下的应力和变形进行评估。
常用的强度分析方法有静力学分析、模态分析、疲劳分析等。
其中,静力学分析是最为基础的方法,主要用于计算机械结构在受力作用下的应力分布和变形情况。
而模态分析则用于评估结构在振动和共振等情况下的应力情况。
疲劳分析则是用于评估机械结构在长期受力作用下的可靠性和寿命。
2. 强度分析的步骤进行机械结构的强度分析时,一般需要经过以下步骤:(1)确定工作状态和受力情况:在进行强度分析之前,需要明确机械结构所处的工作状态和受力情况。
这包括机械结构所受到的外部载荷(如重力、惯性力等)以及接触面的约束条件等。
(2)建立数学模型:根据机械结构的实际情况,建立相应的数学模型。
这个模型一般包括结构的几何形状、材料性能以及约束和载荷等信息。
(3)应力计算:通过应力计算公式或者有限元分析等方法,计算机械结构在受力情况下的应力分布。
应力计算是强度分析的关键步骤,能够帮助工程师了解机械结构的强度状态。
(4)变形分析:在应力计算的基础上,还需要对机械结构的变形情况进行分析。
变形分析可以帮助工程师了解机械结构在受力情况下的位移和形状变化等信息。
(5)评估和优化设计:根据强度分析的结果,评估机械结构的可靠性和安全性,并进行必要的优化设计。
优化设计旨在提高机械结构的强度和性能,确保其能够满足设计要求和使用条件。
3. 强度分析工具和软件在机械设计基础学习中,掌握一些强度分析工具和软件非常有帮助。
这些工具和软件可以帮助工程师更快速和准确地进行强度分析,提高工作效率和设计质量。
机械原理之平面机构的结构分析1. 引言平面机构是机械系统中广泛应用的一种结构类型,用于实现转动或传递运动的目的。
它由多个构件组成,通过铰链连接,并具有特定的运动机构。
本文将对平面机构的结构进行分析,包括构件、铰链以及运动机构的特点等。
2. 平面机构的构件平面机构的构件指的是组成机构的各个零件,包括连杆、链条、轴等。
这些构件不仅决定了机构的结构形式,还直接影响着机构的运动性能。
以下是平面机构常见的构件类型:连杆是平面机构中最常见的构件之一,通常由刚性材料制成。
根据连接方式的不同,连杆可以分为刚性连杆和柔性连杆。
刚性连杆由铰链连接,具有一定的长度和刚性,可以实现平面内的转动。
柔性连杆则由柔性材料制成,如弹簧钢,可以在一定程度上变形,用于实现特定的运动要求。
2.2 链条链条是平面机构中连接连杆的重要构件,其作用是通过链节的连接形成平面机构的运动链。
链条通常由多个链节组成,每个链节可以进行相对运动,从而实现机构的运动。
常见的链条类型有平面链条、滚子链条等。
轴是平面机构中支撑和固定构件的一种。
轴的材质可以是金属、合金等刚性材料,具有一定的强度和刚度,用于支撑和固定机构中的其他构件。
轴可以是定轴和动轴,定轴通常起到固定作用,动轴则能够实现旋转运动。
3. 平面机构的铰链连接平面机构中的铰链连接是实现构件之间相对运动的关键。
铰链连接是指通过固定在构件上的铰链来连接构件,使其可以相对旋转。
常见的铰链连接有以下几种形式:3.1 旋转铰链旋转铰链是最基本的铰链连接方式,它通过轴上的固定连接来实现构件的相对旋转。
旋转铰链具有结构简单、工作可靠的特点,广泛应用于机械系统中。
3.2 滑动铰链滑动铰链是一种通过滑动副实现构件间相对运动的铰链连接。
它通常由导向副和滑块副组成,通过滑块在导向副上的滑动来实现构件的相对运动。
3.3 规则铰链规则铰链是一种特殊的铰链连接方式,它通过杆与杆的端部连接来实现构件的相对运动。
规则铰链具有结构简单、工作平稳的特点,在机械系统中广泛应用。
机械设计基础学习如何进行机械结构的可靠性分析在机械设计领域,可靠性分析是一个至关重要的环节。
通过对机械结构进行可靠性分析,可以评估其在设计寿命内的可靠性水平,为设计优化提供依据,确保机械产品的安全可靠性。
本文将介绍机械设计基础学习中如何进行机械结构的可靠性分析,并探讨相关的分析方法和步骤。
一、可靠性的定义和指标可靠性是指在规定的时间内正常工作的能力,是衡量产品或系统性能稳定性和安全性的重要指标。
常用的可靠性指标包括失效率、可靠度和平均寿命等。
1. 失效率(Failure Rate):指在规定的时间内产生失效的概率,通常以每小时失效次数(Failures in Time,FIT)来表示。
2. 可靠度(Reliability):指在规定的时间内无失效的概率,常用百分比或小数形式表示。
可靠度与失效率存在以下关系:可靠度 = 1 - 失效率。
3. 平均寿命(Mean Time Between Failures,MTBF):指连续正常运行的平均时间,它是失效率的倒数,即MTBF = 1 / 失效率。
二、机械结构的可靠性分析方法机械结构的可靠性分析可以分为定量分析和定性分析两种方法,下面将针对这两种方法进行详细介绍。
1. 定量分析定量分析是通过数学模型和统计方法分析机械结构的可靠性,主要包括以下几个步骤:(1)建立数学模型:根据机械结构的特点和工作原理,建立适当的数学模型,例如可靠性块图(Reliability Block Diagram,RBD)、故障树分析(Fault Tree Analysis,FTA)等,用于描述结构的组成和故障传播关系。
(2)收集可靠性数据:获取机械结构的故障数据、失效模式和失效率等信息,可通过实验测试、历史数据等方式进行。
(3)参数估计:根据已有的可靠性数据,采用参数估计方法计算出失效率、可靠度等参数。
(4)可靠性计算:利用得到的参数,通过可靠性理论和统计方法计算机械结构的失效率、可靠度等指标。

《机械设计基础》第二章平面机构的结构分析测验题班级:姓名:学号:成绩:一、填空题(每空2分,共16分)1. 机构具有确定运动的条件:机构的原动件数目=机构的自由度数。
2. 计算平面机构自由度的公式为 F=3n-(2PL +PH),应用此公式时应注意判断是否有复合铰链、局部自由度及虚约束。
3. 某平面机构有5个低副,1个高副,机构自由度为1,则该机构具有5个构件。
4. 在平面机构中,具有2个约束的运动副是低副,具有1个约束的运动副是高副。
二、单选题(每题2分,共20分)1.以下不属于机器的执行部分的是()。
A 数控机床的刀架B 工业机器人手臂C 汽车的车轮D 空气压缩机2.()保留了2个自由度,带进了一个约束。
A 高副B 移动副C 转动副D 低副3. 若复合铰链处有5个构件汇集在一起,应有()个转动副。
A 4B 3C 2D 54.在比例尺μl=20 mm/mm 的机构运动简图中,量得一构件的长度是10mm,则该构件的实际长度为()mm。
A 20B 50C 200D 5005.两个以上的构件共用同一转动轴线,所构成的转动副称为()。
A 复合铰链B 局部自由度C 虚约束D 单一铰链6.计算机构自由度时,对于局部自由度应()。
A 除去不计B 考虑C 部分考虑D 转化成虚约束7.火车车轮在轨道上转动,车轮与轨道构成()副。
A 移动B 高C 低D 转动8.在机构中采用虚约束的目的是为了改善机构的运动状况和()。
A 美观B 对称C 受力情况D 增加重量9. 为使机构运动简图能够完全反映机构的运动特性,则运动简图相对于与实际机构的()应相同。
A 构件数、运动副的类型及数目B 构件的运动尺寸C 机架和原动件D 以上都是10.计算机构自由度时,若计入虚约束,则机构的自由度就会()A 增多B 减少C 不变三、判断题(每题2分,共20分)1.一个作平面运动的构件有2个独立运动的自由度。
(×)2.平面低副机构中,每个转动副和移动副所引入的约束条件是相同的。
第一章 机构的结构分析与运动分析一、 考点提要(一)机构的结构分析1.机器与机构机器具有以下三大本质属性:(1)人为实物的组合体、(2)各实物(称为构件)间具有确定的相对运动,能够传递和变换运动。
(3)能对外完成有用的机械功或实现能量转换。
机器是由机构组成的,机构是具有各自特点的,能传递和变换运动的基本组合体。
机构只具有机器的前两个属性。
(1)从结构、运动方面看,机器、机构无区别,机构是机器的组成单元;机器可以有一个或多个机构组成。
(2)从功能方面看,机器、机构有区别。
机器实现能量转换或作机械功而机构是实现运动、动力的传递。
2.机械从结构和运动的角度看,机构和机器是相同的,一般统称为机械。
3.构件与零件构件是机构中的组成元件也是运动单元,零件是机械中的制造单元;构件是由一个或若干个零件固定连接组合而成的,各个零件间不能再有相对运动。
构件在图形表达上是用规定的最简单的线条或几何图形来表示的.但从运动学的角度看,构件又可视为任意大的平面刚体。
机构中的构件可分为三类:(1) 机架。
用来支承活动构件(运动构件)的构件,作为研宪机构运动时的参考坐标系。
每个机构都必须有机架,但尽管机构中的活动构件可以在多处和机架组成运动副,但每个机构仅有一个机架。
机架并不一定是固定不动的构件,而是我们选做静参考系的构件,在分析机构时看作是不动的。
(2) 原动件(主动件)。
输入运动的构件,也是运动规律已知的活动构件,即作用有驱动力的构件。
每个机构至少有一个原动件。
(3) 从动件。
其余随主动件的运动而运动的活动构件,其中至少有一个是运动输出的构件。
4.运动副运动副是两个构件组成的可动联接。
两构件上能够参加接触而构成运动副的表面称为运动副元素。
运动副是约束运动的,因而一个运动副至少引入一个约束,也至少保留一个自由度。
至于两构件组成运动副后还能产生哪些相对运动,则与运动别的类型有关。
运动副按其接触方式分为高副(点线接触)和低副(面接触),低副又可按相对运动形式分为转动副和移动副,判断依据是看两构件的相对运动轨迹是直线还是圆弧。
第2章平面机构的结构分析1、运动副:使两个构件直接接触仍能产生一定相对运动的连接2、低副:两个构件为面接触的运动副3、移动副:组成运动副的两个构件通过面接触只能做相对移动的低副4、高副:两个构件通过点或线接触组成的运动副5、运动链:由两个以上运动副连接而成的系统6、运动链分为闭链和开链两种。
闭链:若组成运动链的各构件首尾相连,则所构成的系统成为封闭式运动链,简称闭链;开链:若组成运动链的各构件未构成首尾相连的封闭系统,则成为开式运动链,简称开链。
7、若运动链中其余各构件都有确定的相对运动,这种运动链便构成了机构8、机架:机构中固定不动的构件。
按照给定的运动规律相对于该固定构件运动的构件成为原动件或主动件,其余各活动构件成为从动件。
9、移动副的导路必须与相对移动方向一致10、F = 3n - 2P L - P H (F表示平面机构的自由度数)11、复合铰链:两个或两个以上的构件公用同一转动轴线相连接所构成的运动副12、局部自由度:机构中出现的不影响其他构件运动的构件的自由度13、虚约束:机构中对传递运动不起独立作用的对称部分引入的约束14、机构具有确定运动的条件是:机构的原动件数与机构的自由度数相等第3章挠性传动设计1、带传动的优点:①带具有良好的挠性,可缓和冲击、吸收振动②过载时带会在带轮上打滑,避免了其他零件的损坏③适用于中心距较大的传动④结构简单、制造安装方便、成本低廉带传动的缺点:①带与带轮直接存在滑动,不能保持准确的传动比②需要张紧装置③传动效率较低,带的寿命较短,不宜在易燃、易爆场合下工作2、通常情况下,带速V > 5 m/s,对于普通V带应使Vmax = 25~30 m/s第4章齿轮传动设计3、根据不同的分类方法,齿轮传动可分为以下几种类型:直齿轮传动平行轴齿轮传动斜齿轮传动人字齿轮传动直齿圆锥齿轮传动齿轮传动相交轴齿轮传动斜齿圆锥齿轮传动曲齿圆锥齿轮传动交错轴斜齿圆柱齿轮传动交错轴齿轮传动蜗杆蜗轮传动4、齿顶圆:各齿轮顶部所连成的圆称为齿顶圆,其直径用d a表示,其半径用r a表示5、齿根圆:各齿槽底部所连成的圆称为齿根圆,其直径用d f表示,其半径用r f 表示6、分度圆:为了设计、制造的方便,在齿顶圆与齿根圆之间规定了一个圆,作为计算齿轮各部分尺寸的基准,该圆称为分度圆,其直径用d表示,其半径用r 表示。