实验三 a
- 格式:doc
- 大小:129.50 KB
- 文档页数:7


实验三酱油中氨基酸态氮的测定一、实验原理氨基酸态氮是以氨基酸形式存在的氮元素的含量,是酱油的营养指标,也是酱油中含量的特征指标,含量越高酱油的鲜味越强,质量越好。
氨基酸态氮的测定是通过氨基酸羧基的酸度来测定样品中氨基酸态氮的含量。
而氨基酸含有羧基和氨基,在一般情况下呈中性,故需加入甲醛与氨基结合,固定氨基的碱性,使羧基显示出酸性,用氢氧化钠标准溶液滴定后进行定量,用酸度计测定终点。
R-CH-COOH +HCHO= R-CH-COOHNH2NH-CH2OHR-CH-COOH R-CH-COONa+NaOH= +H2ONH-CH2OH NH-CH2OH二、仪器与试剂1. 仪器酸度计、磁力搅拌器,碱式滴定管、100ml烧杯2. 试剂甲醛溶液(36%)、氢氧化钠标准溶液(0.05mol/L)三、实验步骤1. 准确吸取酱油5.0ml置于100ml容量瓶中,加水至刻度,摇匀后吸取20.0ml 置于100ml烧杯中,加水60ml,插入酸度计,开动磁力搅拌器,用0.05mol/LNaOH 标准溶液滴定酸度计指示pH=8.2,记录消耗氢氧化钠标准溶液的体积(ml)(按总酸计算公式可以计算出酱油的总酸含量)。
2. 向上述溶液中准确加入甲醛溶液10.0ml,摇匀,继续用0.05mol/LNaOH 标准溶液滴定至pH=9.2,记录消耗氢氧化钠标准溶液的体积(ml),供计算氨基酸态氮含量用。
3. 试剂空白试验:取蒸馏水80ml置于另一200ml洁净烧杯中,先用0.05mol/L的氢氧化钠标准溶液滴定至pH=8.2(此时不计碱消耗量)。
再加入10.0ml甲醛溶液,继续用0.05mol/LNaOH标准溶液滴定酸度计指示pH=9.2,第二次所用的氢氧化钠标准溶液的体积为测定氨基酸态氮的试剂空白试验。
式中;V——测定用的样品稀释液加入甲醛后消耗氢氧化钠标准溶液的体积,mL;V0——试剂空白试验中加入甲醛后消耗氢氧化钠标准溶液的体积,mL;20——样品稀释液取用量,mL;c——氢氧化钠标准溶液的浓度,mol/L;0.014——1.00ml氢氧化钠标准溶液[c(NaOH)=1.000mol/L]相当于氮的质量(g),g/mmol。

实验三-单闭环不可逆直流调速系统实验7页目的1. 了解采用脉冲宽度调制控制单相半波可控整流电路的直流电机调速系统的性能、工作原理和结构特点。
2. 掌握直流电机无速度传感器和有速度传感器调速系统的控制原理和操作方法。
3. 了解欠速、超速等异常情况下对直流电机调速系统进行保护的方法。
实验设备本实验采用全数字化交流电机直流调速装置,配备了采用脉冲宽度调制控制单相半波可控整流电路的直流电机、直流电机调速器、速度传感器、控制器、操作面板等。
初始设置1. 将直流电机通电。
2. 调速装置上电,按下系统测试键,检查系统是否正常工作。
3. 调速装置上按下参数设定键,进入参数设定界面,设置本实验所需参数。
设置如下:转矩基数:2.0N·m调速范围:0~1500r/min转速比例:P=10制动时间:1s制动电压:60%控制器型号:无速度传感器控制实验步骤(1) 在实验 System 1 中选择无速度传感器控制,按“进入”键,进入控制界面。
(2) 在控制面板上调节电位器获得所需的转矩基数,在调节完后按“回车”键。
(3) 通过“+”键或“-”键调节实际转速与设定转速之间的差值,使控制器输出的调速信号使转速趋近于设定转速。
(4) 通过“SP”键进入设定转速设置的界面,设置所需的设定转速,设置完后按“回车”键。
(5) 按下启动键,由于原来的设定转速是0r/min,转速开始加速,和设定转速的差值开始减小,控制器的输出信号越来越大,快进电机的电流越来越大,快进电机的扭矩也逐渐增大。
(6) 当实际转速接近设定转速的时候,控制器输出的调速信号被减小,电机的电流和扭矩也被减小,实际转速和设定转速之间的差值也减小,直到实际转速即为设定转速。
(7) 在设定转速下按下停止键,电机开始制动,制动时间为系统设定的1s,制动电压为60%。
(8) 如未设定转速,快进(TA)维持不变,保持电机转子位置不变。
此时转子电势低而维持高转矩状态。
(9) 在设定转速下按下停车键,电机完全停止。

实验三应变片全桥性能实验一、实验目的:了解应变片全桥工作特点及性能。
掌握测量方法。
二、基本原理:应变片基本原理参阅实验一。
应变片全桥特性实验原理如图3—1所示。
应变片全桥测量电路中,将应力方向相同的两应变片接入电桥对边,相反的应变片接入电桥邻边。
当应变片初始阻值:R1=R2=R3=R4,其变化值ΔR1=ΔR2=ΔR3=ΔR4时,其桥路输出电压Uo≈(△R/R)E=KεE。
其输出灵敏度比半桥又提高了一倍,非线性得到改善。
图3—1应变片全桥性能实验接线示意图三、需用器件和单元:主机箱中的±2V~±10V(步进可调)直流稳压电源、±15V直流稳压电源、电压表;应变式传感器实验模板、托盘、砝码。
四、实验步骤:将实验数据填入表3作出实验曲线并进行灵敏度和非线性误差计算。
实验完毕,关闭电源五、实验结果及分析位移(mm)0 -0.5 -1.0 -1.5 -2.0 -2.5 -3.0电压(mv)0 -0.03 -0.07 -0.10 -0.14 -0.17 -0.20位移(mm)-3.5 -4.0 -4.5 -5.0 -5.5电压(mv)-0.23 -0.27 -0.30 -0.34 -0.37位移(mm)0 0.5 1.0 1.5 2.0 2.5 3.0电压(mv)0.01 0.05 0.09 0.13 0.18 0.23 0.27位移(mm) 3.5 4.0 4.5 5.0 5.5电压(mv)0.32 0.36 0.41 0.46 0.51最小二乘法拟合如图所示由此可知灵敏度为0.07935,经计算最大非线性误差为0.039mv,线性度为7.69%。
六、实验心得实验中应变梁的自由端产生负位移后,重新回到位移原点时,其电压值并不为零,这体现了传感器的迟滞。
迟滞误差在本次拟合中修正了。
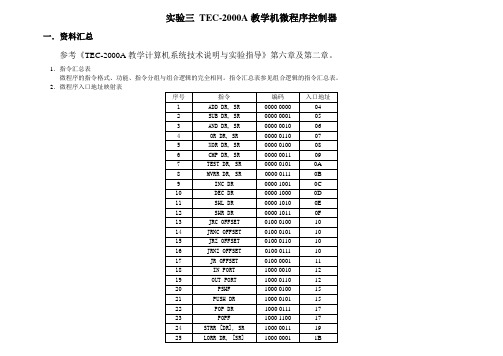
实验三TEC-2000A教学机微程序控制器一.资料汇总参考《TEC-2000A教学计算机系统技术说明与实验指导》第六章及第二章。
1.指令汇总表微程序的指令格式、功能、指令分组与组合逻辑的完全相同。
指令汇总表参见组合逻辑的指令汇总表。
2.微程序入口地址映射表注:该指令入口地址映射表中,前29条指令为基本指令,所有基本指令都已编程到微程序控制器中;后19条为扩展指令,需用户自己确定完成各步操作所需的控制微码,并将微码扩展到MAPROM和七片MPRAM中去。
在《TEC-2000教学计算机系统说明与实验指导》的《微程序控制器》一章中已给出小板上的SCC(GAL20V8)和大板上七片GAL20V8的逻辑表达式,其中包括扩展指令,用户在扩展指令时不必改写这八片GAL20V8的逻辑表达式。
3.指令流程框图基本指令执行流程框图注: 12是IN/OUT两条指令的入口地址,IN指令由12跳到14,OUT指令由12跳到13.15是PUSH/PSHF两条指令的入口地址,PUSH指令由15跳到1A,PSHF指令由15跳到16.17是POP/POPF两条指令的入口地址,POP指令由17跳到1C,POPF指令由17跳到18.在地址3A处放的是一条空操作指令,只起跳转的作用,用户在扩展中断隐指令时,可将该地址的这条指令用中断隐指令代替.扩展指令执行流程框图0063664.指令流程表微程序表二.微程序控制器实验实验目的通过看懂教学计算机中已经设计好并正常运行的数条基本指令(例如,ADD、MVRR、OUT、MVRD、JR、RET等指令)的功能、格式和执行流程,然后自己设计几条指令的功能、格式和执行流程,并在教学计算机上实现、调试正确。
其最终要达到的目的是:1.深入理解计算机微程序控制器的功能、组成知识;2.深入地学习计算机各类典型指令的执行流程;3.对指令格式、寻址方式、指令系统、指令分类等建立具体的总体概念;4.学习微程序控制器的设计过程和相关技术。
变压吸附实验利用多孔固体物质的选择性吸附分离和净化气体或液体混合物的过程称为吸附分离。
吸附过程得以实现的基础是固体表面过剩能的存在,这种过剩能可通过范德华力的作用吸引物质附着于固体表面,也可通过化学键合力的作用吸引物质附着于固体表面,前者称为物理吸附,后者称为化学吸附。
一个完整的吸附分离过程通常是由吸附与解吸(脱附)循环操作构成,由于实现吸附和解吸操作的工程手段不同,过程分变压吸附和变温吸附,变压吸附是通过调节操作压力(加压吸附、减压解吸)完成吸附与解吸的操作循环,变温吸附则是通过调节温度(降温吸附,升温解吸)完成循环操作。
变压吸附主要用于物理吸附过程,变温吸附主要用于化学吸附过程。
本实验以空气为原料,以碳分子筛为吸附剂,通过变压吸附的方法分离空气中的氮气和氧气,达到提纯氮气的目的。
一实验目的(1)了解和掌握连续变压吸附过程的基本原理和流程;(2)了解和掌握影响变压吸附效果的主要因素;(3)了解和掌握碳分子筛变压吸附提纯氮气的基本原理;(4)了解和掌握吸附床穿透曲线的测定方法和目的。
二实验原理物质在吸附剂(固体)表面的吸附必须经过两个过程:一是通过分子扩散到达固体表面,二是通过范德华力或化学键合力的作用吸附于固体表面。
因此,要利用吸附实现混合物的分离,被分离组分必须在分子扩散速率或表面吸附能力上存在明显差异。
碳分子筛吸附分离空气中N2和O2就是基于两者在扩散速率上的差异。
N2和O2都是非极性分子,分子直径十分接近(O2为0.28nm,N2为0.3nm),由于两者的物性相近,与碳分子筛表面的结合力差异不大,因此,从热力学(吸收平衡)角度看,碳分子筛对N2和O2的吸附并无选择性,难于使两者分离。
然而,从动力学角度看,由于碳分子筛是一种速率分离型吸附剂,N2和O2在碳分子筛微孔内的扩散速度存在明显差异,如:35℃时,O2的扩散速度为2.0×106 ,O2的速度比N2快30倍,因此当空气与碳分子筛接触时,O2将优先吸附于碳分子筛而从空气中分离出来,使得空气中的N2得以提纯。
实验三土壤吸湿水的测定实验报告实验地点:生地楼实验时间:实验人:一:目的意义风干土中水分含量受大气中相对湿度的影响,土样仍保有一定水分。
在土壤理化分析中,各项分析结果都以“烘干土”作为计算标准,分析是一般都用风干土,计算时就必须根据水分含量换算成烘干土。
因为风干土的含水量因生物气候条件、土壤类型、组成不同而差异很大,难以相互比较。
因此分析测定的土样,必须测定其吸湿水含量。
二:实验原理测定时把土样放在105-110℃的烘箱中烘至恒重,则失去的质量为水分质量,即可计算土壤水分百分数。
在此温度下土壤吸着水被蒸发,而结构水不致破坏,土壤有机质也不致分解。
三:实验仪器分析天平(0.001g)、小铝盒(2个)、烘箱、牛角勺、干燥器。
四:操作步骤1).在分析天平上称出干燥而洁净的铝盒重量(w);2).放入约5g过1mm筛的风干土(称两份土做平行);3).烘干:盖上盒盖,准确称重(w1),再将盖打开放入已预热至105°±2℃的烘箱中,控制在105-110℃范围,连续烘干6-8小时;4).冷却:取出铝盒迅速放入干燥器中冷却,冷却至室温,然后取出立即称重(w2);5).称重:再放入烘箱中,烘干3——5小时,在干燥器中冷却,再称重,检验是否恒重。
(占干土重的百分数,准确至0.001)。
五:原始数据记录(1)实验数据(2)数据处理土壤吸湿水含量%=(w1-w2)▪ 100/(w2-w)W——铝盒重量(g)w1——铝盒+风干土重(g)w2——铝盒+烘干土重(g)六:注意事项1.严格控制恒温条件,温度过高,土壤有机质易碳化逸失。
2.按分析步骤的条件一般试样烘6h可烘至恒重,含水较多,质地黏重的样品需8h。
3.在烘干期间不要随意打开烘箱,以免影响烘箱内温度升降变化和使土壤吸湿。
4.平行测定结果用算术平均值表示,保留小数最后一位数。
水分小于5%的风干土样,相差不得小于0.2%。
实验三维生素AD胶丸中维生素A的含量测【实验目的】1.熟悉胶丸制剂分析的方法和基本操作;2.掌握紫外-三点校正法测定维生素A含量的原理和方法。
【实验原理】本品系取维生素A与维生素D2或维生素D3,加鱼肝油或精炼食用植物油(在0℃左右脱去固体脂肪)溶解并调整浓度后制成。
每丸含维生素A应为标示量的90.0~120.0%。
本品除含有全反式维生素A醋酸酯外,尚含有少量对测定有影响的杂质,主要包括维生素A2、维生素A3、维生素A的氧化物、无生物活性的聚合物鲸醇、维生素A的异构体及合成时产生的中间体,他们各具不同的光谱特征和生物效价。
全反式维生素A醋酸酯在环己烷中最大吸收波长为328nm,而以上所述杂质的不相关吸收哎316~340nm波长范围内呈一条直线,且随波长的增长吸光度变小,由于物质对光的吸收具有加和型,故采用三点校正法可以消除这些杂质的干扰。
【仪器与试剂】(一)仪器紫外-可见分光光度计、电子天平、小刀等(二)试剂维生素AD胶丸、环己烷、乙醚等【实验操作】(一)胶丸内容物平均重量的测定取胶丸20粒,精密称定。
注意切开丸壳,取出内容物。
丸壳用乙醚洗涤3~4次,置通风处,使乙醚挥散,精密称定,算出每丸内容物的平均重量。
(二)供试品溶液的制备、测定与计算取一粒维生素AD内容物,精密称定。
用环己烷溶解并定量稀释成25ml。
取0.8ml,再用环己烷稀释至25ml,即制成每1ml中含9—15单位的溶液,照分光光度法测定吸收峰的波长,并在下列各波长处测定吸收度。
计算各吸收度与波长328nm处吸收度的比值和波长328nm处的E%1cm1值。
波长/nm 吸光度比值波长/nm 吸光度比值300 0.555 340 0.811316 0.907 360 0.299328 1.000如果吸收峰波长在326~329nm之间,但所测得的各波长吸收度比值超过表中规定的±0.02,则按下式求出校正后的吸收度值。
然后再计算含量。
《数值计算》实验报告学院:软件学院专业:软件工程班级:12级2班实验名称编写多项式拟合程序姓名付阿萨德学号1402120207 成绩实验报告内容要求:实验三:编写多项式拟合程序。
并用该程序解决下列问题:假定某天的气温变化记录如下表,试用最小二乘方法找出这一天的气温变化规律。
ht/ 1 2 3 4 5 6 7 8 9 10 11 12 13 CT︒/14 14 14 14 15 16 18 20 22 23 25 28 31 ht/14 15 16 17 18 19 20 21 22 23 24 CT︒/32 31 29 27 25 24 22 20 18 17 16考虑下列类型函数,计算误差平方和,并作图比较效果。
1.二次函数2.三次函数3.四次函数4.函数))((2ctbaeC--=(提高:非线性拟合问题)一.实验目的:比较不同次数的多项式拟合效果,了解多项式拟合原理。
二.实验原理:利用最小二乘法计算三.实验环境:一台PC计算机、C++。
四.实验过程(编写的程序)#include <iostream>#include <iomanip>#include <math.h>using namespace std;double o=0.5;float a[10];float b[10][10];float x[15],y[15];void p (int,int);float f(int,int);float fy(int ,int );void G(int);float F(float [],int,int );void suofang(float,int);void kongzhi(int);void tuxing1();void tuxing2();void main(){int n;cout<<"\t\t\t 程序使用说明"<<endl;cout<<"\t\t\t+--------------------+"<<endl;cout<<"\t\t\t|欢迎使用多项式拟合, |"<<endl;cout<<"\t\t\t|本程序在求解的过程|"<<endl;cout<<"\t\t\t|中所以的图形都是一|"<<endl;cout<<"\t\t\t|个大致的轮廓,但所求|"<<endl;cout<<"\t\t\t|解的多项式的比较精确|"<<endl;cout<<"\t\t\t+--------------------+"<<endl;cout<<endl<<endl<<"请输入样点坐标的个数(n>0): n=";cin>>n;cout<<endl<<endl<<"(注意:x的值一定要从小到大输入)"<<endl; cout<<"输入坐标值:"<<endl;for(int i=0;i<n;i++) //依次输入坐标点{cout<<"x["<<i<<"]=";cin>>x[i];cout<<"y["<<i<<"]=";cin>>y[i];}suofang(o,n);char w;do{ //根据所描绘的坐标点选择合适构造合适的多项式system("cls");cout<<"1.一次多项式"<<endl;cout<<"2.二次多项式"<<endl;cout<<"3.次数大于2的多项式"<<endl;cout<<"根据描绘的离散的点选择你要构造的多项式的类型:(1-3):"; cin>>w;}while(w!='1'&&w!='2'&&w!='3');switch(w){case '1':p(n,2);tuxing1();break;case '2':p(n,3);tuxing2();break;case '3':cout<<"你要构造的多项式的最高次幂:(2<m<"<<n<<") m="; int k;cin>>k;p(n,k+1);cout<<"--------------描绘图形功能未增加!----------------"<<endl; break;}}void p(int n,int k) //对所构造的多项式系数求解的增广矩阵赋值{for(int i=1;i<=k;i++){for(int j=1;j<=k;j++)b[i][j]=f(i+j-2,n);b[i][k+1]=fy(i-1,n);}b[1][1]=n;G(k);}float f(int k,int n)//x[i]次幂求和函数{float sum=0;for(int i=0;i<n;i++)sum+=pow(x[i],k);return sum;}float fy(int k,int n) //x[i]次幂与y[i]乘积求和函数{float sum=0;for(int i=0;i<n;i++)sum+=y[i]*pow(x[i],k);return sum;}void G(int m){for(int k=1;k<m;k++) //消元过程{for(int i=k+1;i<m+1;i++){float p1;if(b[k][k]!=0)p1=b[i][k]/b[k][k];for(int j=k;j<m+2;j++)b[i][j]=b[i][j]-b[k][j]*p1;}}a[m]=b[m][m+1]/b[m][m];for(int l=m-1;l>=1;l--) //回代求解a[l]=(b[l][m+1]-F(a,l+1,m))/b[l][l];cout<<endl<<"------说明:输出的多项式[]中的数代表指数"<<endl<<endl;cout<<"你所构造的多项式为:y="; //系数保留4位小数输出多项式if(a[1]!=0)cout<<setiosflags(ios::fixed)<< setprecision(4)<<a[1];for(int i=2;i<m+1;i++){if(a[i]>0)cout<<" + "<<setiosflags(ios::fixed)<< setprecision(4)<<a[i]<<"*X"<<"["<<i-1<<"]"; else if(a[i]<0)cout<<setiosflags(ios::fixed)<< setprecision(4)<< a[i]<<"*X"<<"["<<i-1<<"]";}cout<<endl;}float F(float c[],int l,int m)//供G函数调用{float sum=0;for(int i=l;i<=m;i++)sum+=b[l-1][i]*c[i];return sum;}void suofang(float t,int n) //离散点的缩放函数{cout<<endl<<endl<<"离散的坐标点的拟合图形:"<<endl;cout<<"O---------------------------------------->Y"<<endl;cout<<"|";for(int i=0;i<n;i++){for(float j=y[1]-t;j<y[i];j=j+t)cout<<" ";cout<<"*";for(int l=0;l<(x[i+1]-x[i])/t;l++)cout<<endl<<"|";}cout<<endl<<"X"<<endl<<endl;kongzhi(n);}void kongzhi(int n) //控制缩放比例{char w;do{cout<<"如果对所描绘的离散坐标点不满意"<<endl;cout<<"你可以进行一下操作来调节离散点"<<endl;cout<<"1-缩小离散图"<<endl;cout<<"2-放大离散图"<<endl;cout<<"3-进入下一步"<<endl;if(o<0.02&&o>=0.01)cout<<"--------------不能再放大,继续放大程序将终止!选择(1-2)----------"<<endl; cout<<"选择你的操作(1-3):";cin>>w;}while((w!='1')&&(w!='2')&&(w!='3'));switch(w){case '1':o=o+0.1;suofang(o,n);break;case '2':if(o<0.2)o=o-0.01;elseo=o-0.1;if(o<0.01)exit(1);suofang(o,n);break;case '3':break;}}void tuxing1() //直线描绘函数{cout<<endl<<"构造的直线如下:"<<endl;cout<<"-------------------------------------->Y"<<endl;cout<<"|";for(int x=1;x<=10;x++){float y=x*a[2]+a[1];if(a[2]>0){for( float j=a[1];j<y;j=j+0.5*a[2])cout<<" ";cout<<"*"<<endl<<"|";}if(a[2]<0){for(float j=10*a[2]+a[1];j<y;j=j+0.5*(-a[2]))cout<<" ";cout<<"*"<<endl<<"|";}}cout<<endl<<"X"<<endl;}void tuxing2()//抛物线描绘函数{cout<<endl<<"构造的抛物线如下:"<<endl;cout<<"-------------------------------------->Y"<<endl;cout<<"|";for(float i=-0.5*a[2]/a[3]-7;i<=-0.5*a[2]/a[3]+7;i=i+1){float x=a[1]+a[2]*i+a[3]*i*i;if(a[3]>0){float h=(4*a[3]*a[1]-a[2]*a[2])/(4*a[3]*a[3]);for(float j=h-13.5*a[3]*0.4;j<x;j=j+13.5*a[3]*0.4)cout<<" ";cout<<"*"<<endl<<"|";}if(a[3]<0){for(floatj=a[1]+a[2]*(-0.5*a[2]/a[3]-7)+a[3]*(-0.5*a[2]/a[3]-7)*(-0.5*a[2]/a[3]-7)-13.5*a[3]*0.4;j<x;j=j +13.5*(-a[3])*0.4)cout<<" ";cout<<"*"<<endl<<"|";}}cout<<endl<<"X"<<endl;}五、实验结果及分析六.实验反思要熟练运用最小二乘法,加强练习。