摄像头模组知识
- 格式:pdf
- 大小:2.48 MB
- 文档页数:36

手机摄像头常用的结构如下图1所示,主要包括镜头,基座,传感器以及PCB部分。
图1CCM(compact camera module)种类1.FF(fixed focus)定焦摄像头目前使用最多的摄像头,主要是应用在30万和130万像素的手机产品。
2.MF(micro focus)两档变焦摄像头主要用于130万和200万像素的手机产品,主要用于远景和近景,远景拍摄风景,近景拍摄名片等带有磁条码的物体。
3.AF(auto focus)自动变焦摄像头主要用于高像素手机,具有MF功能,用于200万和300万像素手机产品。
4.ZOOM 自动数码变焦摄像头主要用于更高像素的要求,300万以上的像素品质。
Lens部分对于lens来说,其作用就是滤去不可见光,让可见光进入,并投射到传感器上,所以lens相当于一个带通滤波器。
CMOS Sensor部分对于现在来说,sensor主要分为两类,一类是CMOS,一类是CCD,而且现在CMOS是一个趋势。
对于镜头来讲,一个镜头只能适用于一种传感器,且一般镜头的尺寸应该和sensor的尺寸一致。
对于sensor来说,现在仍然延续着Bayer阵列的使用,如下图2所示,图3展示了工作流程,光照à电荷à弱电流àRGB信号àYUV信号。
图2图3图4图4展示了sensor的工作原理,这和OV7670以及OV7725完全相同。
像素部分那么对于像素部分,我们常常听到30万像素,120万像素等等,这些代表着什么意思呢?图5解释了这些名词。
图5那么由上面的介绍,可以得出,我们以30万像素为例, 30万像素~= 640 * 480 = 30_7200;可见所谓的像素数也就是一帧图像所具有的像素点数,我们可以联想图像处理的相关知识,这里的像素点数的值,也就是我们常说的灰度值。
像素数越高,当然显示的图像的质量越好,图像越清晰,但相应的对存储也提出了一定的要求,在图像处理中,我们也会听到一个概念,叫做分辨率,其实这个概念应该具体化,叫做图像的空间分辨率,例如72ppi,也就是每英寸具有72个像素点,比较好的相机,能达到490ppi。
系统组-揭应平20150914摄像头模组相关知识模组基本结构AF Type FF Type模组主要器件AF Type模组主要器件:1.Sensor (传感器)2.LENS(镜头)3.VCM(音圈马达)4.IR & BG(滤光片)5.Bracket (底座)6.PCB (基板)FF Type模组主要器件:1.Sensor (传感器)2.LENS(镜头)3.Holder(底座)4.IR & BG(滤光片)5.PCB (基板)CSP Sensor模组相关工艺注:每个厂家的生产流程都各不同,基本的流程都是差不多;CSP 的工艺就相对COB 简单很多;COB Sensor模组相关工艺注:上面是基本的COB 工艺流程,各个工艺会每个厂家都有一定的区别;当然某些客户对测试会有一些特殊要求;例如在调焦前及检测后做一次震动,用来确认Particle 的问题;一般Sensor分类按制造工艺来分为CSP & COBCSP: Chip scale package(Sensor底部锡球通过锡膏与FPC开窗PAD接触连接)COB: Chip On Board (通过胶使Sensor与FPC相接触)1.Sensor的分类1.Sensor的分类CSP & COB优缺点对比CSP:优点:模组工艺简单,Particle容易控制;生产良率高;缺点:在成像区表面有Cover Glass层,增加了Sensor本身成本,成本高; COB: Chip On Board优点:1.产品光透性相对较好;2.模组厚度相对较低,对LENS后要求小;缺点:1.模组厂商设备投入大;2.制程复杂,良率较难控制(尤其是POD & POG);2.LENS 相关参数2.LENS 相关参数EFL介紹EFL為Effective Focal Length的縮寫,意思是有效焦距。
有效焦距就是透鏡系統中心到成像焦點的距離(即光學系統中心到成像面的距離)。

摄像头模组基础知识摄像头模组啊,这可是个挺有趣的东西呢。
你看啊,摄像头模组就像是手机或者电脑的小眼睛,它可重要啦。
传感器就是这个小团队的中场核心啦。
光线被镜头收集之后,就来到传感器这里。
传感器就像是一块特别敏感的小田地,光线就像是种子一样洒在上面。
不同强度和颜色的光线会在传感器上留下不同的“痕迹”,就像不同的种子在田地里会长出不同的作物一样。
这时候啊,传感器就得把这些光线的信息转化成电信号,这可是个技术活呢。
要是传感器不好,就像中场核心不会传球一样,后面的图像质量肯定好不了。
摄像头模组的分辨率也是个很关键的东西。
分辨率高就像你用放大镜看东西一样,能看到更多的细节。
比如说你拍一朵花,高分辨率的摄像头模组能让你看到花瓣上的小绒毛,就像你凑近了仔细看一样清楚。
而低分辨率呢,就像你有点近视没戴眼镜看东西,模模糊糊的,很多细节都看不到了。
那摄像头模组的对焦功能呢?这就像是射箭的时候瞄准一样。
如果对焦不准,拍出来的照片就会像箭射偏了一样,你想拍的东西是模糊的,背景反而清楚了,或者整个画面都是虚的。
自动对焦功能就很方便啦,就像有个小助手一直在帮你调整瞄准的方向,让你总能拍到清晰的画面。
再说说摄像头模组的视野吧。
有的摄像头模组视野很宽广,就像你站在山顶上看风景,一大片景色都能收进眼里。
这种摄像头模组适合拍风景照或者大合影。
而有的视野比较窄,就像你从门缝里看东西,只能看到一小部分,但这对于特写拍摄很有用,能把一个小物件拍得很大很清楚,就像把小蚂蚁拍成大怪兽一样有趣。
在不同的设备上,摄像头模组也有不同的特点。
手机上的摄像头模组就得小巧玲珑,还得功能强大。
因为手机就那么点地方,还得满足大家各种各样的拍照需求,什么自拍啊,拍美食啊,拍风景啊。
这就像在一个小厨房里要做出满汉全席一样不容易。
而相机上的摄像头模组呢,往往更专业,就像专业的厨师在大厨房里做菜,可以用各种高级的工具和食材,能拍出更专业的照片。
现在啊,摄像头模组的发展也特别快。
摄像头模组知识范文
摄像头模组由摄像头本身和模组组成,摄像头本身是指捕捉图像的机
械部件,而模组则是摄像头配件中最重要的一个。
它是摄像头、拍摄图像、把图像传输到电脑等操作的控制器,其包括多个部件,如光学元件、模拟
电路板、图像采集板、处理板、驱动芯片、校准程序、图像处理算法等。
1.捕捉图像:摄像头模组能够捕捉、清晰地显示摄影内容,用户可以
在拍摄时调整摄像头方向或者焦距。
2.图像传输:摄像头模组能够将拍摄的画面实时传输到电脑或者其他
设备,从而实时观看、记录、分享或者处理拍摄的画面。
3.调整参数:摄像头模组能够与设备连接,调整参数,如曝光补偿、
白平衡调整等,从而达到满足拍摄要求的品质。
4.录像:摄像头模组可以实现不断录制视频,从而记录节目和文件,
实现电视录像。

摄像头模组基础知识扫盲
照相机模组的结构主要包括摄像头主体、控制电路、晶片、处理器、显示屏、电池等部件。
它们的功能是收集需要处理的视频信号,通过晶片及处理器处理和输出到显示屏,实现图片或视频的传输。
从外形上分,摄像头模组的外形有枪型、球型、罩型等,其中枪型摄像头模组主要用于长距离安全监控,球型摄像头模组用于多用途监控,例如家庭安防监控,而罩型摄像头模组则用于近距离的监控。
摄像头模组主要由硬件和软件两部分组成。
硬件包括镜头、摄像机模组、录像机模组等部件。
镜头是摄像头模组的核心部件,允许光线进入摄像头,控制光线的聚焦距离和角度,影响拍摄的效果。
摄像头模组用于捕捉图像并将图像变成数字信号,将其输出到处理器进行处理。
手机摄像模组相关知识1.介绍手机摄像模组是现代智能手机的重要组成部分,它使得用户能够随时随地拍摄照片和自制视频。
随着手机摄像模组技术的发展,如今的手机可以实现高分辨率、高动态范围、光学防抖等先进功能,让用户享受到高质量的拍摄体验。
2.镜头模组镜头模组是手机摄像模组的核心组成部分,它包括镜头、底板和支架等。
镜头模组的主要功能是收集来自外界的光线,并将其聚焦到影像传感器模组上。
镜头模组根据焦距的不同可以分为定焦和变焦两种类型。
变焦模组可以通过调节镜头的位置来实现焦距的变化,从而让用户在不同场景下拍摄清晰的照片。
3.影像传感器模组影像传感器模组是手机摄像模组中另一个重要组成部分,它接收到来自镜头模组传来的光线,并将其转化为电信号。
根据传感器的类型,目前手机摄像模组主要有两种类型:CMOS和CCD。
CMOS传感器由于其低功耗、高速度和成本低等优点,目前成为手机摄像模组的主流选择。
4.控制电路和处理器手机摄像模组还包括必要的控制电路和处理器,用于控制摄像模组的工作状态和进行数据处理。
控制电路可以控制影像传感器模组的曝光时间、白平衡和对焦等功能,从而优化图像的质量。
处理器负责对采集到的数据进行处理,包括降噪、锐化、色彩校正等功能,提供更加清晰和逼真的图像输出。
5.模组封装和测试一旦镜头、影像传感器和相关电路被组装在一起,手机摄像模组就需要进行封装和测试。
通常情况下,摄像模组会被封装在一个小巧的模块中,以方便在手机中进行安装。
在封装之前,模组还需要进行各种测试来确保其功能的正常运行,例如焦距测试、光线适应性测试和抗震测试等。
6.摄像模组的进一步发展随着科技的不断进步,手机摄像模组在性能上的提升空间越来越大。
未来,手机摄像模组有望实现更高的像素、更强的防抖功能以及更广的动态范围。
同时,新的技术,如激光对焦和多摄像头配置,也将进一步推动手机摄像模组的发展。
总结:手机摄像模组在现代智能手机中起到了至关重要的作用。
它通过镜头模组、影像传感器模组以及控制电路和处理器的组合实现图像的采集和视频录制功能。
摄像头模组(CCM)介绍:⼀、摄像头模组(CCM)介绍:1、camera特写摄像头模组,全称CameraCompact Module,以下简写为CCM,是影像捕捉⾄关重要的电⼦器件。
先来张特写,各种样⼦的都有,不过我前⼀段时间调试那个有点丑。
2、摄像头⼯作原理、camera的组成各组件的作⽤想完全的去理解,还得去深⼊,如果是代码我们就逐步分析,模组的话我们就把它分解开来,看他到底是怎么⼯作的。
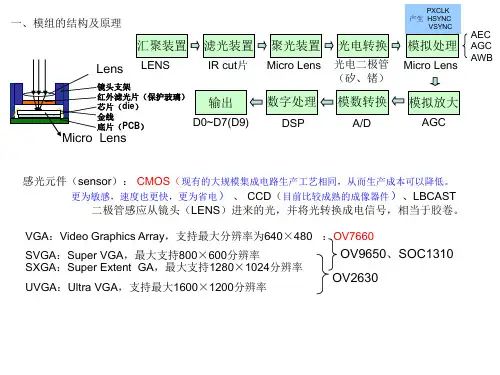
看下它是有那些部分构成的,如下图所⽰:(1)、⼯作原理:物体通过镜头(lens)聚集的光,通过CMOS或CCD集成电路,把光信号转换成电信号,再经过内部图像处理器(ISP)转换成数字图像信号输出到数字信号处理器(DSP)加⼯处理,转换成标准的GRB、YUV等格式图像信号。
(2)、CCM 包含四⼤件:镜头(lens)、传感器(sensor)、软板(FPC)、图像处理芯⽚(DSP)。
决定⼀个摄像头好坏的重要部件是:镜头(lens)、图像处理芯⽚(DSP)、传感器(sensor)。
CCM的关键技术为:光学设计技术、⾮球⾯镜制作技术、光学镀膜技术。
镜头(lens)是相机的灵魂,镜头(lens)对成像的效果有很重要的作⽤,是利⽤透镜的折射原理,景物光线通过镜头,在聚焦平⾯上形成清晰的影像,通过感光材料CMOS或CCD感光器记录景物的影像。
镜头⼚家主要集中在台湾、⽇本和韩国,镜头这种光学技术含量⾼的产业有⽐较⾼的门槛,业内⽐较知名的企业如富⼠精机、柯尼卡美能达、⼤⽴光、Enplas等传感器(sensor)是CCM的核⼼模块,⽬前⼴泛使⽤的有两种:⼀种是⼴泛使⽤的CCD(电荷藕合)元件;另⼀种是CMOS(互补⾦属氧化物导体)器件。
电荷藕合器件图像传感器CCD(Charge Coupled Device),它使⽤⼀种⾼感光度的半导体材料制成,能把光线转变成电荷,通过模数转换器芯⽚转换成数字信号。
CCD由许多感光单位组成,通常以百万像素为单位。
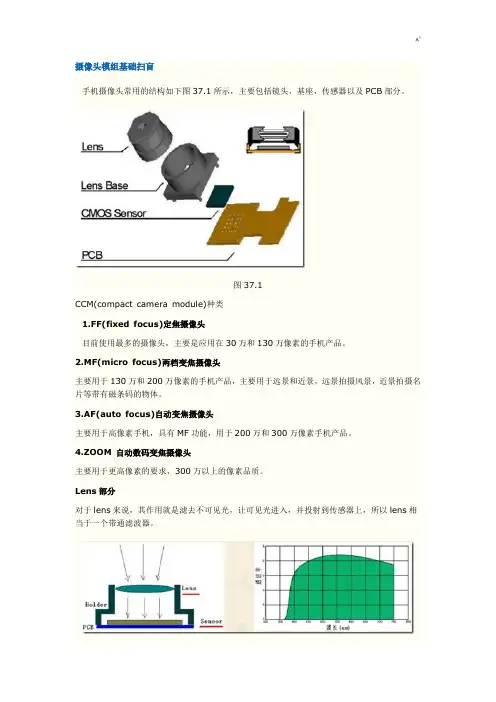
摄像头模组基础扫盲手机摄像头常用的结构如下图37.1所示,主要包括镜头,基座,传感器以及PCB部分。
图37.1CCM(compact camera module)种类1.FF(fixed focus)定焦摄像头目前使用最多的摄像头,主要是应用在30万和130万像素的手机产品。
2.MF(micro focus)两档变焦摄像头主要用于130万和200万像素的手机产品,主要用于远景和近景,远景拍摄风景,近景拍摄名片等带有磁条码的物体。
3.AF(auto focus)自动变焦摄像头主要用于高像素手机,具有MF功能,用于200万和300万像素手机产品。
4.ZOOM 自动数码变焦摄像头主要用于更高像素的要求,300万以上的像素品质。
Lens部分对于lens来说,其作用就是滤去不可见光,让可见光进入,并投射到传感器上,所以lens相当于一个带通滤波器。
CMOS Sensor部分对于现在来说,sensor主要分为两类,一类是CMOS,一类是CCD,而且现在CMOS是一个趋势。
对于镜头来讲,一个镜头只能适用于一种传感器,且一般镜头的尺寸应该和sensor的尺寸一致。
对于sensor来说,现在仍然延续着Bayer阵列的使用,如下图37.2所示,图37.3展示了工作流程,光照à电荷à弱电流àRGB信号àYUV信号。
图37.2图37.3图37.4图37.4展示了sensor的工作原理,这和OV7670以及OV7725完全相同。
像素部分那么对于像素部分,我们常常听到30万像素,120万像素等等,这些代表着什么意思呢?图37.5解释了这些名词。
图37.5那么由上面的介绍,可以得出,我们以30万像素为例,30万像素~= 640 * 480 = 3 0_7200;可见所谓的像素数也就是一帧图像所具有的像素点数,我们可以联想图像处理的相关知识,这里的像素点数的值,也就是我们常说的灰度值。
像素数越高,当然显示的图像的质量越好,图像越清晰,但相应的对存储也提出了一定的要求,在图像处理中,我们也会听到一个概念,叫做分辨率,其实这个概念应该具体化,叫做图像的空间分辨率,例如72ppi,也就是每英寸具有72个像素点,比较好的相机,能达到490ppi。
摄像头模组基础知识--CameraModule(COMS与CCD)1) Camera Module构成摄像头模组的整体2D图纸,主要介绍摄像头模组的尺寸,弯折状态,连接器型号,sensor型号等。
- Sensor Chip晶片sensor chipsensor 电路以及连接器电路FPC摄像头模组实物CMOS 与CCD摄像头的差异:CMOS(Complementary Metal-Oxide Semiconductor)即互补性金属氧化物半导体,其在微处理器、闪存和特定用途集成电路(ASIC)的半导体技术上占有绝对重要的地位。
CMOS和CCD一样都是可用来感受光线变化的半导体。
CMOS主要是利用硅和锗这两种元素所作成的半导体,通过CMOS上带负电和带正电的晶体管来实现基本的功能的。
这两个互补效应所产生的电流即可被处理芯片记录和解读成影像。
CCD 是英语 Charge Coupled Device(电荷耦合元件)的缩写,是一种将图像转换为电信号的半导体元件。
大小约为长宽各1 厘米左右,由类似棋盘的格状排列的小像素 (pixel) 组成。
CCD Image Sensor (Charged Coupled Device,电荷耦合元件)在光转换部存储的光电荷由Analog Shift Register传送的方式这是在各cell中存储的电荷由电压差形成的cell完成Shift.比CMOS Sensor集成度和传送速度低,但能得到高的图像质量的元件.数字摄像机的 CCD (Charge Coupled Device)是把光信号转换为电信号的作用,并由很多元件构成把这些元件表示为pixei或像素.CCD的大小是把对角线的直径1/2inch, 1/3inch来表示为对角线的直径,应把总像素数和有效像素数分开表示是正确Power 消耗指对CCD的情况表示在CCD中消耗的功率, 而对CIS的情况输出Digital out put (内装ADC)的情况.观察其他特征时, CCD的情况比CMOS的工序相对难, CMOS的情况可以random access而CCD是不可以的. 20世纪90年代后期及最近,由于CMOS工序技术的发展和signal processing algorithm(运算法则)的改善等开始克服了已有的CMOS Image Sensor具有的不足,又选择性地把CCD工序使用CMOS Image Sensor上,使制品质量比现有的改善的特别其技术力量快速增加把Image Sensor市场的实际情况达到与CCD平分的程度.。
摄像头模组知识介绍
由于科技的快速发展,市场上的摄像头模组也在不断演进,从最初的高质量的模组到现在的模组更为复杂,性能也更加优越。
摄像头模组是一种可以实现视频、图像采集,处理和显示的一种集成电路模块,它是相机系统的重要组成部分,和其它的组件一起构成一个完整的相机系统。
摄像头模组的设计一般可以分为两部分,一部分是模组本身,由传感器、模组处理器、输出接口、电源模块等组成;另外一部分是配套的辅助硬件,如控制单元、激励板、数字滤波器等。
其中,摄像头模组本身占据了主要的比重,即模组的传感器、处理器、输出接口和电源模块,以下将对摄像头模组的各个组成部分进行介绍。
首先,摄像头模组的传感器是最重要的组成部分,控制着整个模组的性能,其主要任务是将光能转换为电信号存储于摄像头中,也就是可以看到的图像信息。
摄像头模组中最常用的传感器有CCD和CMOS,它们的主要区别在于CCD可以获得更高的图像分辨率,而CMOS在噪声控制和功耗方面更优。
摄像头模组专业术语
以下是摄像头模组的专业术语:
1. 感光元件:摄像头模组中用于接收光线并转换为电信号的元件。
2. 像素:感光元件上的最小单位,用于表示图像的分辨率。
3. 帧率:摄像头每秒拍摄的图像数量。
4. 视角:摄像头可以拍摄到的场景范围。
5. 自动对焦:摄像头自动调整焦距以确保图像清晰的功能。
6. 白平衡:摄像头自动调整颜色温度以确保图像颜色真实的功能。
7. 曝光时间:摄像头接收光线的时间长度。
8. 增益:摄像头对电信号的放大程度。
9. 噪点:摄像头在低光环境下拍摄时出现的颗粒状或斑点状的图像瑕疵。
10. 动态范围:摄像头可以同时捕捉到的最亮和最暗部分的范围。
这些术语是摄像头模组的基本概念,了解它们可以帮助你更好地理解摄像头的工作原理和性能。
系统组-揭应平20150914摄像头模组相关知识模组基本结构AF Type FF Type模组主要器件AF Type模组主要器件:1.Sensor (传感器)2.LENS(镜头)3.VCM(音圈马达)4.IR & BG(滤光片)5.Bracket (底座)6.PCB (基板)FF Type模组主要器件:1.Sensor (传感器)2.LENS(镜头)3.Holder(底座)4.IR & BG(滤光片)5.PCB (基板)CSP Sensor模组相关工艺注:每个厂家的生产流程都各不同,基本的流程都是差不多;CSP 的工艺就相对COB 简单很多;COB Sensor模组相关工艺注:上面是基本的COB 工艺流程,各个工艺会每个厂家都有一定的区别;当然某些客户对测试会有一些特殊要求;例如在调焦前及检测后做一次震动,用来确认Particle 的问题;一般Sensor分类按制造工艺来分为CSP & COBCSP: Chip scale package(Sensor底部锡球通过锡膏与FPC开窗PAD接触连接)COB: Chip On Board (通过胶使Sensor与FPC相接触)1.Sensor的分类1.Sensor的分类CSP & COB优缺点对比CSP:优点:模组工艺简单,Particle容易控制;生产良率高;缺点:在成像区表面有Cover Glass层,增加了Sensor本身成本,成本高; COB: Chip On Board优点:1.产品光透性相对较好;2.模组厚度相对较低,对LENS后要求小;缺点:1.模组厂商设备投入大;2.制程复杂,良率较难控制(尤其是POD & POG);2.LENS 相关参数2.LENS 相关参数EFL介紹EFL為Effective Focal Length的縮寫,意思是有效焦距。
有效焦距就是透鏡系統中心到成像焦點的距離(即光學系統中心到成像面的距離)。
鏡頭的焦距分為像方焦距和物方焦距。
像方焦距是像方主面到像方焦點的距離,同樣,物方焦距就是物方主面到物方焦點的距離。
如下圖:FOV 介紹FOV 為Field Of View 的縮寫,意思是視場角,就是鏡頭能拍攝到的最大視野範圍(指對角線視角)。
視場角分為垂直,水平和對角線三種(如下圖所示).對角線視角水平視角垂直視角傳感器物體2.LENS 相关参数F/NO 介紹F/NO 為F-Number 的縮寫,意思是焦數,即有效焦距(EFL)與入射瞳孔直徑(EPD)的比值。
F/# = EFL / EPD (EPD :入射瞳孔直徑),F/NO 是進光量系數,數值代表了鏡頭允許進光量的多少。
F2 F5.6 F162.LENS 相关参数Image Circle介紹Image Circle意思是像圓徑,是指光學系統所成像的最大區域。
TTL介紹TTL為Total Track Length的縮寫,意思是鏡頭總高。
總高可分為光學及機構,一般在光學仕樣中為光學TTL,在鏡頭圖面中為機構TTL。
光學TTL為從光學系統的第一片鏡片至成像面的長度,如下圖紅色箭頭長度。
機構TTL為從Barrel頂端至成像面的長度,如下圖藍色箭頭長度。
BFL介紹BFL為Back Flange Length的縮寫,意思是後焦。
是指鏡頭最後端至成像面的長度。
如下圖紅色箭頭長度。
Illumination 介紹Illumination 意思是相對照度 。
是指物體或被照面上被光源照射所呈現的光亮程度,稱為照度。
相對照度為中心照度與週邊照度比值。
02004006008001000120014001600180020000.30.40.50.60.70.80.911.1Relative Illumination P i x elPixelRelative Illumination of Mini-lens 2004006008001000120014001600180020002004006008001000120014000.30.40.50.60.70.80.911.1100%80%60%0%RI=边缘照度/中心照度*100%CRA介紹CAR為Chief Ray Angle的縮寫,意思是主光線角度。
主光線就是光線由物的邊緣出射,通過孔徑光欄的中心最後到達像的邊緣,圖中紅色的線就是主光線。
主光線角度為主光線與平行光線的角度。
3.BG & IR Filter 相关参数3.1 用途及原理在使用CCD、CMOS光感应元件拍摄彩色景物时,因CCD、CMOS对颜色的反应与人眼不同,所以必须将光感应元件所能侦测的而人眼无法侦测的红外线部份除去,同时调整可见光范围内对颜色的反应,使影像呈现的色彩符合人眼的感觉,所以在低通滤波晶片表面镀上IR(AR)CUT(干涉式)或配玻璃(吸收式)使用简单讲,IR与蓝玻璃作用都是一样的,就是滤光,但是IR是通过镀膜利用干涉相消的原理来滤光,而蓝玻璃是利用吸收光能量的原理来滤光通过干涉相消来滤光,主要影响因素就是镀膜的控制,所以与IR厚度关系没有特别大,通过吸收光能量来滤光,这个直观的理解,肯定跟厚度有关系,厚度越厚,滤光效果越好。
IR Coating :目地在于滤除红外线,主要用反射的方式滤掉红外光,而反射光容易造成干扰形成Flare杂光现象IR Coating能滤除特定波长(如650nm以上)的光AR-Coating:目的是增加透光率,其具有抗反射之功能,当加上单面AR Coating后,滤光片会提升3-5%的透光率,如果加上双面AR Coating镀膜,滤光片可达到98%以上的透光率,否则只有不到90%的透光率,这对CCD 或CMOS的感光度就有很大的影响,也就是说,不用AR Coating就会降低镜头的感光度,而使用双面AR Coating,就会使图像更清晰。
同时,AR Coating具有抗氧化之功能和有增加保护膜之功能,滤光片有AR Coating的保护也就不容易起雾。
红外截止滤光片Infra-red cut filter 3.BG & IR Filter 相关参数功用:1、IR片主要作用是通过减少红光/红外线进入Sensor来防止图象色偏;2、IR片的具体特性由Sensor确定,不同的Sensor对IR片的要求会有差异,OV sensor通常要求T=50% 650+/-10nm;3、不同的IR片供应商,IR膜系的构成有差异,常见的IR膜系有从6层到十几层,通常层数较多的效果较好,层数较少时,红外部分会有部分频率截止效果不好。
;4、IR片装在LENS最后一面,接近Sensor表面。
因此IR片的表面质量对影象品质影响较大。
5.IR片将红外光反射,维持可见光穿透以真空光学多层镀膜来达到滤波的功能,在可见光高穿透的同时,高反射红外线,可修正CMOS及CCD的色偏现象,减少红外线的干扰.装有IR与未装IR镜头品质比对晴天日光下,普通镜头色彩还原性明显胜出,无IR镜头色彩非常淡黑暗环境中用红外光源照射被拍摄物体,不带IR的镜头可以接受红外光线,使黑暗中的物体变得可见蓝玻璃是用”吸收”的方式过滤红外线,可过滤630nm波长以上的光,并且过滤比较彻底如果只考虑滤除红外线,蓝玻璃是比较好的选择注:IR coating主要用反射的方式滤掉红外光,而反射光容易造成干扰形成Flare杂光现象蓝玻璃IRCF的单价约是普通的10倍蓝玻璃IRCF蓝玻璃红外截止滤光片产品基于蓝玻璃镀膜工艺制造,主要运用于 800 万像素及以上手机拍照镜头内。
800 万像素及以上的镜头中,IR Cut 需要使用蓝玻璃材质,但这并非单纯贴上一片蓝玻璃,而是指在进行镀膜时,通过多重镀膜技术,使其达到蓝玻璃的效果。
随着手机拍照像素的提高,800万像素手机镜头采用的红外截止滤光片开始由蓝玻璃取代光学玻璃,蓝玻璃的主要供应商是日本的旭硝子和HOYAIR厚度不同,后焦位置会发生变化0.3mm变到0.35mmIR厚度不同,象散和场曲会发生变化0.3mm变到0.35mmIR厚度不同,场曲和畸变会发生变化0.3mm变到0.4mmIR有无会对杂光产生影响,同样,左图无IR,画面整体发红,右图有IR;同理,IR厚度不同,光路可能变化,比如左图中并无拖出状杂光,右图较明显日用 IR filter coating日/夜 两用 IR filter coating穿透(%)波长(nm)Peak 点穿透50%穿透50%IR FILTER COATING 实测频谱图:3.BG & IR Filter 相关参数4.VCM相关VCM基本结构Space (盖子隔离片)T-Spring (上弹片) Magnet(磁石)Carrier (载体) Coil (线圈)Base (基座)B-Spring(下弹片)Top Cover(顶盖)音圈馬達VCM (V oice C oil M otor) 屬於線性直流馬達(Linear Direct-Current Motor) 的一種,音圈馬達的名稱由來是因為其結構與喇叭相似,如圖一所示,而其組成元件主要包括永久磁鐵、軛鐵與線圈三部分,它是利用永久磁鐵與軛鐵所構成的具有直接驅動、固定行程(Stroke)特性的致動器。
音圈馬達所產生的推力與流經線圈電流成正比,主要使用於需要線性推力、扭力、高加速度、高頻致動的線性或旋轉性運動上,由於音圈馬達具有精度高、反應快的特性,配合閉路(Closed Loop)的控制系統,可以提高磁碟機的軌道密度(Track Density),增加容量,並降低資料擷取時間(Access Time),故主要應用是作為磁碟機讀寫頭的驅動馬達,用來移動磁頭到磁碟片上的各項軌道去讀寫資料。
(图一) 4.VCM相关音圈馬達的作動原理:當音圈馬達之線圈於磁場中,當施加電壓於線圈以產生電流時,依據勞倫師定律(Lorentz Law),直接將電能轉換成機械能,如(1)是所示,會有力量作用於線圈上。
(必歐-沙伐定律&安培定律V=IR)F=rILxB (1)其中F 為作用於線圈上之力(又稱勞倫師力),I 為線圈上之電流,L 為導線之總長度,其方向為電流之方向,B 為磁通密度,r 為線圈在磁場中之長度與總長度之比,若磁通密度、導線方向及作用力方向三者互相垂直時,可改用純量式來表示,如(2)是所示F=rILB=rIKf (2)其中Kf=LB,為力量常數。
對一音圈馬達而言B及L已被固定,唯一可控制的參數為電流I,由(2)是可知電流和力量成正比,只要適當地控制電流即可控制其運動。
音圈馬達的機械行程運作在可動部線圈部分,當電流流經繞線線圈時,將產生軸向的推力,此推力大到足以克服摩擦力、慣性及繞線線圈上的負載時,則定部磁場與動部繞線線圈會產生相對運動。