工业机器人工作站安装与调试(ABB)课件第4篇任务12-13
- 格式:pptx
- 大小:3.81 MB
- 文档页数:56


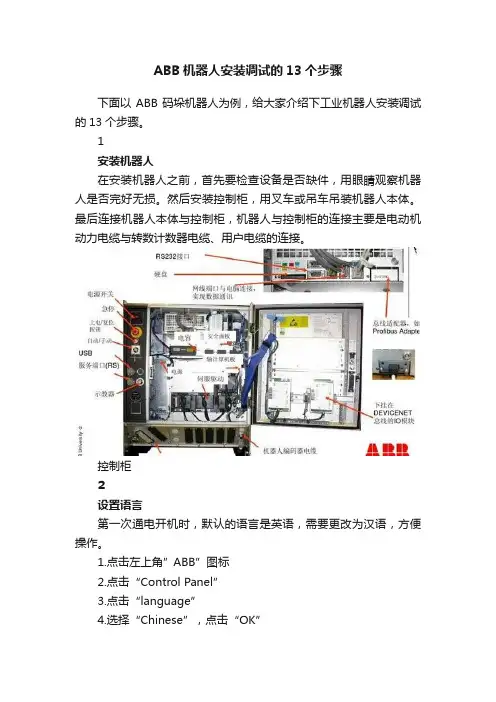
ABB机器人安装调试的13个步骤下面以ABB码垛机器人为例,给大家介绍下工业机器人安装调试的13个步骤。
1安装机器人在安装机器人之前,首先要检查设备是否缺件,用眼睛观察机器人是否完好无损。
然后安装控制柜,用叉车或吊车吊装机器人本体。
最后连接机器人本体与控制柜,机器人与控制柜的连接主要是电动机动力电缆与转数计数器电缆、用户电缆的连接。
控制柜2设置语言第一次通电开机时,默认的语言是英语,需要更改为汉语,方便操作。
1.点击左上角”ABB”图标2.点击“Control Panel”3.点击“language”4.选择“Chinese”,点击“OK”5.选择“Yes“后等待机器人重启,语言设置就完成了示教器主界面3备份与恢复定期对机器人进行备份,是保证机器人正常工作的良好习惯。
备份文件可以放在机器人内部的存储器上,也可以备份到U盘上。
备份文件包含运行程序和系统配置参数等内容。
当机器人系统出错,可以通过备份文件快速的恢复备份前的状态。
平时在程序更改之前,一定要做好备份。
需要注意的是,备份恢复数据是具有唯一性的,不能将一台机器人的备份数据恢复到另一个机器人上。
4校准ABB机器人每个关节轴都有一个机械原点的位置。
遇到下列情况时,需要对机械原点的位置进行转数计数器的更新操作:1.更新伺服电动机转数计数器电池后2.当转数计数器发生故障,修复后3.转数计数器与测量板之间断开过以后4.断电后,机器人关节轴发生了移动5.当系统警报提示“10036转数计数器未更新”5系统I/O配置及接线以某抓手接线电气原理图来说明。
机器人信号输入部分原理图,其中704位24V+,703位24V-,输入信号由夹爪开始位、夹爪结束位、压板结束位、抓包辊道准备好、托盘准备好,一共五个。
前三个为气缸磁性开关检测信号,后两个为配套PLC传送给机器人大包和托盘准备好的信号,为了实现电气隔离,需要将PLC给机器人的电平信号转化为机器人自身的电平,需要通过继电器来实现。
职业教育工业机器人应用高职高专优质规划教材工业机器人工作站安装与调试(ABB)(第 1 版)蒋正炎郑秀丽主编目录 / CONTENTS任务一 认识YL-399工业机器人实训装备 1 2 34567 891011121314 任务二认识ABB 工业机器人任务三示教器基本操作任务四 RobotStudio 软件基本使用任务五基础工作站安装与调试任务六搬运工作站安装与调试任务七机床上下料工作站安装与调试 任务八焊接工作站安装与调试任务九码垛工作站安装与调试任务十涂胶工作站安装与调试任务十一装配工作站安装与调试任务十二伺服电机变位机工作站安装与调试任务十四工业机器人弧焊设备安装与调试15任务十五工业机器人鼠标装配 任务十三自动生产线工作站安装与调试任务三示教器基本操作任务三示教器基本操作3.1 任务描述3.2 解压过程3.3 技能要点3.4 知识准备3.5 任务实施3.6 知识拓展3.7 思考与练习3.1任务描述任务三示教器基本操作本任务从最基本的示教器的操作开始,学习ABB机器人的基本操作。
图3-1是一个最小化工业机器人系统。
读者可利用该工业机器人系统进行示教器的基本操作仿真练习。
本任务从最基本的示教器的操作开始,学习ABB机器人的基本操作。
图3-1是一个最小化工业机器人系统。
读者可利用该工业机器人系统进行示教器的基本操作仿真练习。
任务三示教器基本操作解压过程3.2解压过程首先解压工作站打包文件“operation.rspag”,如图3-2所示,工作站解压的过程如图3-3所示,完成后,单击“关闭”即可。
任务三示教器基本操作技能要点1.【正确手持示教器】示教器是进行机器人的手动操作、程序编写、参数配置以及监控用得手持装置,也是我们最常打交道的控制装置。
正确手持示教器的方法如图3-4所示。
3.3技能要点任务三示教器基1.软件操作本操作1.机器人上电操作首次上电,确认输入电压正常后,将控制柜上如图3-5所示的电源开关拨到“ON”状态,机器人上电,系统开始启动。
职业教育工业机器人应用高职高专优质规划教材工业机器人工作站安装与调试(ABB)(第 1 版)蒋正炎郑秀丽主编目录 / CONTENTS任务一 认识YL-399工业机器人实训装备 1 2 34567 891011121314 任务二认识ABB 工业机器人任务三示教器基本操作任务四 RobotStudio 软件基本使用任务五基础工作站安装与调试任务六搬运工作站安装与调试任务七机床上下料工作站安装与调试 任务八焊接工作站安装与调试任务九码垛工作站安装与调试任务十涂胶工作站安装与调试任务十一装配工作站安装与调试任务十二伺服电机变位机工作站安装与调试任务十四工业机器人弧焊设备安装与调试15任务十五工业机器人鼠标装配 任务十三自动生产线工作站安装与调试任务十一装配工作站安装与调试任务十一装配工作站安装与调试11.1 任务描述11.2 工作站介绍11.3 技能要点11.4 知识准备11.5 任务实施11.6 知识拓展11.7 思考与练习任务十一装配工作站安装与调试本工作站以对内外嵌套装配工件为例,利用IRB120专用装配夹具配合装配工作站套装实现对内外嵌套工件装配的过程。
工作中两个立体落料式供料机构,可对物料A、物料B进行原料供给。
装配安装平台可盛放物料用于物料A/B安装时使用。
待A、B料装配完成后对其进行仓储入库。
可训练对机器人精确定位及抓手吸盘夹具的学习。
本工作站中还通过RobotStudio软件预置了动作效果,在此基础上实现I/O配置、程序数据创建、目标点示教、程序编写及调试,最终完成内外嵌套物件装配应用程序的编写。
通过本章学习,使大家掌握工业机器人在装配工作站应用的编写技巧。
任务十一装配工作站安装与调试ABB机器人在零件装配领域也有着广泛地应用,其运动精度高、速度平稳,可以很好地保证所装配零件间的精度,通过视觉系统地辅助,可精确定位各种装配件微小尺寸的自动安装使得生产更加柔性化。
任务十一装配工作站安装与调试工作站介绍11.2工作站介绍装配工装套件包含外形工件料仓、内工件料仓、成品库、装配台、机器人夹具等组成。