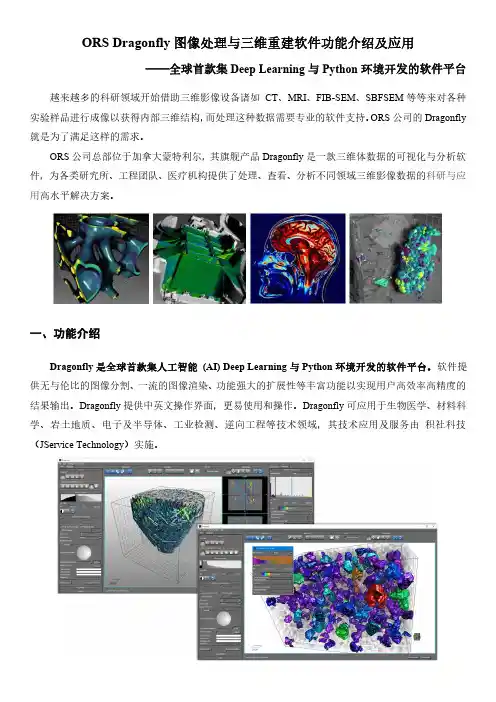
三维重建软件演示
- 格式:ppt
- 大小:3.17 MB
- 文档页数:21
3Dbody软件心解剖在翻转课堂教学中的应用周正月; 曹昊炜; 张小宁; 李卫东; 陈成【期刊名称】《《解剖学杂志》》【年(卷),期】2019(042)006【总页数】3页(P618-620)【作者】周正月; 曹昊炜; 张小宁; 李卫东; 陈成【作者单位】北京卫生职业学院护理系医学基础教研室北京 101149; 北京卫生职业学院实验中心北京 101149【正文语种】中文“翻转课堂”是让学生在课前完成知识学习,课上完成知识吸收与掌握的一种教学模式[1]。
3Dbody软件是通过计算机和生物信息技术实现人体解剖结构可视化的一套软件系统,利用信息化技术进行三维重建,形成一套系统、完整、灵活的可视人体解剖软件[2]。
心作为人体重要脏器,其解剖特点是:结构复杂、内容繁多,各种解剖名词多,学生掌握困难,学习兴趣低。
如果解剖与生理功能分离,静态展示解剖结构,不能形成动态整体概念就更难融会贯通。
笔者引入3Dbody软件动态展示心结构,尝试以学生为主体的翻转课堂,提高教学效果。
1 对象和方法1.1 研究对象选择本校高职护理专业2018级138名学生作为研究对象,年龄15~17岁,均为女生,2组学生在年龄、居住地及入学成绩等方面差异无统计学意义(P>0.05),所有研究对象对本研究均知情同意。
1.2 分组将4个班随机分为实验组和对照组,其中2个班(70人)为实验组,另2个班(68人)为对照组。
2组均在大一第1学期开设《解剖学》课程,108学时,第13周授课心血管系统,心的结构为1学时,实验组采用3Dbody软件翻转课堂教学,对照组采用传统教学。
1.3 教学实施1.3.1 实验组(1)课前:提前2 d发布任务:复习所学知识,预习心章节,提供学习资源(模型、视频和图谱等),给出导向性学习主题,建立学习小组,4~5名学生为1组,手机下载3Dbody软件,虚拟解剖心的层次结构及相关毗邻,开放实验室,学生结合3Dbody软件和模型标本自主学习,总结遇到的问题。
Smart3D系列教程5之《案例实战演练2——大区域的地形三维重建》一、前言Wish3D出品的Smart3D系列教程中,前面一讲说明了小物件的照片三维重建,相信大伙儿对建模的流程有了必然的了解。
这次讲解中,咱们将演示说明以一组无人机倾斜摄影照片为原始数据,通过Smart3D建模软件,重建生成三维地形的进程。
与上次不同的是,这次的建模需要对导入的照片预先做一些处置,详情后面会一一说明。
二、工具材料包括Smart3D建模软件,一组垂直拍照而且多角度、重叠度知足重建要求的航片、航片对应的pos数据文件三、方式步骤关于通过无人机航拍的照片,照片进行三维重建生产模型,一些情形下照片中是自带有GPS数据信息的,而另一些情形那么是会导出一组无定位信息的照片和对应的pos数据文本。
前者咱们直接新建区块,把照片直接导入给软件跑出结果就ok了。
那么,这次咱们要紧来谈论研究第二种情形,即照片和pos分开的情形。
(一)区块导入表格的编辑区别于第一种情形咱们需要编辑下导入区块的表格,咱们将照片的文件途径、参考坐标系、传感器的大体信息等信息嵌入到那个表格里,通过它来实现对照片和pos信息数据的导入。
后面的操作处置是跟直接导入照片的方式是没有不同的。
第一,咱们看到原始数据的文件夹如以下图所示,包括一组照片和相应的pos文件:能够看到,那个pos数据是以文本文档的形式存在:而在导入区块的进程当中,咱们需要导入Excel表格,那么,这时需要运用必然的办公软件的技术将其转换为Excel表格,那个表格需要包括如以下图的4个工作表:结果如下:Photogroups工作表中,名称列需要与照片工作表的PhotogroupName一致:Photos工作表的编辑结果如以下图:操纵点工作表中,由于无人机航拍的区域不是专门大,且关于建模功效的精度没有设定范围,追求建成模型的速度,咱们本次先不设操纵点,很多朋友都是误把照片放到了那个工作表中,致使处置显现问题,需要注意一下。
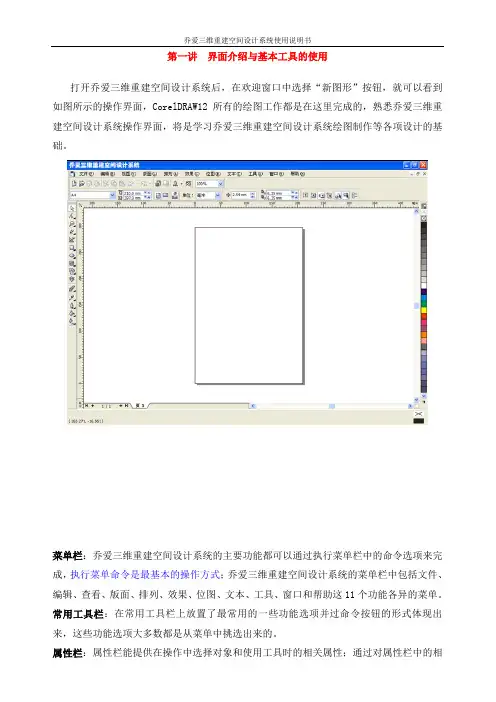
第一讲界面介绍与基本工具的使用打开乔爱三维重建空间设计系统后,在欢迎窗口中选择“新图形”按钮,就可以看到如图所示的操作界面,CorelDRAW12所有的绘图工作都是在这里完成的,熟悉乔爱三维重建空间设计系统操作界面,将是学习乔爱三维重建空间设计系统绘图制作等各项设计的基础。
菜单栏:乔爱三维重建空间设计系统的主要功能都可以通过执行菜单栏中的命令选项来完成,执行菜单命令是最基本的操作方式;乔爱三维重建空间设计系统的菜单栏中包括文件、编辑、查看、版面、排列、效果、位图、文本、工具、窗口和帮助这11个功能各异的菜单。
常用工具栏:在常用工具栏上放置了最常用的一些功能选项并过命令按钮的形式体现出来,这些功能选项大多数都是从菜单中挑选出来的。
属性栏:属性栏能提供在操作中选择对象和使用工具时的相关属性;通过对属性栏中的相关属性的设置,可以控制对象产生相应的变化。
当没有选中任何对象时,系统默认的属性栏中则提供文当的一些版面布局信息。
工具箱:系统默认时位于工作区的左边。
在工具箱中放置了经常使用的编辑工具,并将功能近似的工具以展开的方式归类组合在一起,从而使操作更加灵活方便。
状态栏:在状态栏中将显示当前工作状态的相关信息,如:被选中对象的简要属性、工具使用状态提示及鼠标坐标位置等信息。
导航器:在导航器中间显示的是文件当前活动页面的页码和总页码,可以通过单击页面标签或箭头来选择需要的页面,适用于进行多文档操作时。
工作区:工作区(又称为“桌面”)是指绘图页面以外的区域。
在绘图过程中,用户可以将绘图页面中的对象拖到工作区存放,类似于一个剪贴板,它可以存放不止一个图形,使用起来很方便。
调色板:调色板系统默认时位于工作区的右边,利用调色板可以快速的选择轮廓色和填充色。
视图导航器:这是CorelDraw 10新增加的一个界面功能,通过点击工作区右下角的视图导航器图标来启动该功能后,你可以在弹出的含有你的文档的迷你窗口中随意移动,以显示文档的不同区域。
三维重建的四种常用方法在计算机视觉和计算机图形学领域中,三维重建是指根据一组二维图像或其他类型的感知数据,恢复或重建出一个三维场景的过程。
三维重建在许多领域中都具有重要的应用,例如建筑设计、虚拟现实、医学影像等。
本文将介绍四种常用的三维重建方法,包括立体视觉方法、结构光法、多视图几何法和深度学习方法。
1. 立体视觉方法立体视觉方法利用两个或多个摄像机从不同的视角拍摄同一场景,并通过计算图像间的差异来推断物体的深度信息。
该方法通常包括以下步骤:•摄像机标定:确定摄像机的内外参数,以便后续的图像处理和几何计算。
•特征提取与匹配:从不同视角的图像中提取特征点,并通过匹配这些特征点来计算相机之间的相对位置。
•深度计算:根据图像间的视差信息,通过三角测量等方法计算物体的深度或距离。
立体视觉方法的优点是原理简单,计算速度快,适用于在实时系统中进行快速三维重建。
然而,该方法对摄像机的标定要求较高,对纹理丰富的场景效果较好,而对纹理缺乏或重复的场景效果较差。
2. 结构光法结构光法利用投影仪投射特殊的光纹或光条到被重建物体表面上,通过观察被投射光纹的形变来推断其三维形状。
该方法通常包括以下步骤:•投影仪标定:确定投影仪的内外参数,以便后续的光纹匹配和几何计算。
•光纹投影:将特殊的光纹或光条投射到被重建物体表面上。
•形状计算:通过观察被投射光纹的形变,推断物体的三维形状。
结构光法的优点是可以获取目标表面的细节和纹理信息,适用于对表面细节要求较高的三维重建。
然而,该方法对光照环境要求较高,并且在光纹投影和形状计算过程中容易受到干扰。
3. 多视图几何法多视图几何法利用多个摄像机从不同视角观察同一场景,并通过计算摄像机之间的几何关系来推断物体的三维结构。
该方法通常包括以下步骤:•摄像机标定:确定每个摄像机的内外参数,以便后续的图像处理和几何计算。
•特征提取与匹配:从不同视角的图像中提取特征点,并通过匹配这些特征点来计算摄像机之间的相对位置。
《视觉几何三维重建:OpenMVS源码解析》课程手册
一、简介
随着三维重建技术在各个领域的广泛应用,从工业设计到虚拟现实,从考古学到生物医学成像,视觉几何三维重建技术已成为一项重要的研究课题。
本课程将深入解析OpenMVS(开源的多视图立体视觉重建系统)的源码,帮助您理解并掌握视觉几何三维重建的核心技术。
二、课程大纲
OpenMVS简介与安装配置
OpenMVS的背景与用途
安装与配置OpenMVS环境
相机模型与多视图几何
相机模型:针孔相机模型、广角相机模型等
多视图几何:对极几何、基础矩阵、本质矩阵等
OpenMVS中的图像预处理
图像读取与显示
相机校正与图像去畸变
图像滤波与增强
三维点云生成与优化
从多视图图像中提取三维点云
点云优化:去除噪声、平滑处理等
三维表面重建
从点云生成表面网格
表面网格优化与处理
OpenMVS扩展与应用案例
OpenMVS的高级功能扩展
OpenMVS在各领域的应用案例与实践
源码解析与实践项目
OpenMVS源码结构与模块解析
实践项目:从数据采集到三维重建全流程实践
三、课程资源与工具
OpenMVS官方文档与源码
3D建模软件(如Blender)
编程环境:Linux或Windows系统,C++开发环境(如Visual Studio)版本控制工具(如Git)
四、课程目标与要求
掌握视觉几何三维重建的基本原理与技术熟悉OpenMVS系统架构与核心功能模块能够独立进行三维重建项目的实践与应用。
2019年软 件2019, V ol. 40, No. 4基金项目: 滇中城市群综合承载力时空演变机理和调控研究资助作者简介: 王涛(1987-),男,助教,主要研究方向:三维激光点云数据处理、无人机影像提取;柳德江(1973-),男,副教授,主要研究方向:城市综合承载力;阳利永(1983-),男,副教授,主要研究方向:地籍与房产测量;曾举(1986-),女,讲师,主要研究方向:水文遥感。
基于SketchUp 的建筑物实景三维模型重建王 涛,柳德江,阳利永,曾 举(玉溪师范学院 地理与国土工程学院,云南 玉溪 653100)摘 要: 随着三维激光扫描仪的价格不断下降,激光扫描技术的不断完善和数据处理方法的不断提升,三维激光扫描技术应用越来越广泛。
本文通过STONEX X500Plus 三维激光扫描仪采集传习馆点云数据,利用SketchUp 软件,详细介绍建筑物三维建模的主要技术流程,实现建筑物点云数据实景三维建模。
关键词: SketchUp ;三维激光;点云配准;点云滤波中图分类号: TP399 文献标识码: A DOI :10.3969/j.issn.1003-6970.2019.04.014本文著录格式:王涛,柳德江,阳利永,等. 基于SketchUp 的建筑物实景三维模型重建[J]. 软件,2019,40(4):74-76Reconstruction of Real 3D Models of Buildings Based on SketchUpWANG Tao, LIU De-jiang, YANG Li-yong, ZENG Ju(College of Geography and Territorial Engineering, Yuxi Normal University, Yuxi, 653100, China )【Abstract 】: With the continuous decline in the price of 3D laser scanners, the continuous improvement of laser scanning technology and the continuous improvement of data processing methods, 3D laser scanning technology has become more and more widely used. This article uses the STONEX X500Plus 3D laser scanner to collect point cloud data from the library, and uses SketchUp software to introduce in detail the main technical processes of 3D modeling of buildings and realize the real 3D modeling of building point cloud data. 【Key words 】: SketchUp; 3D laser; Point cloud registration; Point cloud riltering0 引言客观世界中的物体多以三维立体的形式展现在人们面前,包含外形特征、表面纹理等信息。
三维重建技术操作流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!Download Tip: This document has been carefully written by the editor. I hope that after you download, they can help you solve practical problems. After downloading, the document can be customized and modified. Please adjust and use it according to actual needs. Thank you!三维重建技术操作流程:①数据采集:使用相机、激光扫描仪、无人机等设备从不同角度对目标物体进行拍摄或扫描,获取大量二维图像或点云数据。
②数据预处理:对采集的数据进行去噪、配准(对齐)处理,确保不同视角的数据能够精确匹配,为后续步骤奠定基础。
③特征提取:从预处理后的图像或点云中提取特征点、边或面等信息,这些特征用于计算视图间的关系和几何结构。
④匹配与对齐:利用特征匹配算法,找出不同图像或扫描数据中的对应特征点,通过迭代优化实现多视图数据的精确对齐。
⑤三维模型构建:基于对齐后的数据,运用三角测量、立体视觉或点云融合等方法,重建物体的三维几何结构,生成密集点云或网格模型。
⑥纹理映射:将采集的二维图像纹理映射到三维模型表面,增加模型的真实感和细节,使得重建模型更加逼真。
⑦模型优化与细化:对初步重建的模型进行平滑处理、孔洞填充等优化,提高模型的连续性和完整性,必要时进行手工修正。
⑧成果输出与应用:将最终的三维模型导出为通用格式(如OBJ、STL等),应用于虚拟现实、文化遗产保护、城市规划、逆向工程等领域。
三维视觉重建技术的使用教程与实现步骤解析近年来,随着科技的不断进步与发展,三维视觉重建技术逐渐成为许多领域的热门话题。
无论是在虚拟现实游戏开发中,还是在建筑、地图制作等领域,三维视觉重建技术都有着广泛的应用。
本文将为您提供三维视觉重建技术的使用教程与实现步骤解析,帮助您更好地了解和掌握这一技术。
首先,我们需要明确三维视觉重建技术是什么。
简单来说,三维视觉重建技术是通过对场景的图像或视频进行处理和分析,从而获得场景的三维模型或点云数据的一种技术。
其主要思想是通过摄像机或传感器获取场景的图像或视频数据,然后利用计算机算法对这些数据进行处理和分析,最终生成场景的三维模型。
在使用三维视觉重建技术之前,我们需要准备一些必要的工具和软件。
首先,我们需要一台具备较高性能的计算机,以保证在处理大量图像或视频数据时的运算速度和效果。
其次,我们需要选择一款适合的三维视觉重建软件,例如Structure from Motion(SFM)或Multi-View Stereo(MVS)等。
这些软件通常提供了一些基础的三维视觉重建功能,可以帮助我们完成后续的操作。
接下来,我们将详细介绍三维视觉重建技术的使用教程与实现步骤。
第一步,采集图像或视频数据。
三维视觉重建技术的前提是需要有一定数量和质量的图像或视频数据。
我们可以使用相机、无人机、激光扫描仪等设备进行数据采集。
在采集过程中,需要注意保持相机的稳定性,保持拍摄角度的一致性,并尽量避免遮挡和光照变化等影响因素。
第二步,图像预处理。
采集到的图像或视频数据需要进行一定的预处理,以获取更准确和清晰的三维重建结果。
通常包括图像去噪、图像对齐、相机标定等步骤。
这些预处理操作可以帮助我们提高数据的质量和准确性。
第三步,特征提取与匹配。
在三维视觉重建过程中,通常需要通过特征提取和匹配来确定图像间的对应关系,从而建立起三维模型的点云数据。
特征提取可以使用一些常见的特征检测算法,例如SIFT、SURF、ORB等。
VGStudio MAX2.0软件在CT图像三维重建中的应用张于北;王倩妮【摘要】为发展和应用工业CT测量技术,提高航空零部件无损检测质量,我们在现有工业CT机二维计算机层析的基础上,使用三维重建专业软件VGStudio MAX 2.0,对被检工件的系列二维CT图进行重建,得到三维数据模型.计算机重建的工件可以实现更高级的几何显示功能、结构复杂部位的尺寸测量以及缺陷的检测分析,让人们对产品的整体结构和质量有更为全面、深刻的了解.【期刊名称】《计测技术》【年(卷),期】2011(031)005【总页数】3页(P30-32)【关键词】无损检测;VGStudio MAX 2.0;工业CT;测量;三维重建【作者】张于北;王倩妮【作者单位】中航工业北京航空材料研究院检测中心,北京100095;中航工业北京航空材料研究院检测中心,北京100095【正文语种】中文【中图分类】TH8780 引言进入本世纪以来,工业CT技术在应用上的一个重大进步是三维可视化技术及其软件的发展。
科学计算可视化技术将一系列二维CT图像重构成三维结构,建立被检工件的三维数据库集,人们可以在计算机上十分方便地对工件的任意方向或位置进行剖切,检查工件的所有细节部分;同时又可对工件的整体布局结构获得更为直观、全面的了解。
工业CT技术不仅在产品检测环节发挥作用,同时也参与到产品的设计环节中,更多地影响着产品的生产进程。
随着工业CT技术在逆向工程方面的日益增多的应用,人们对工业CT检测结果的概念也逐渐从单幅的二维CT图片换成了整体的三维CT形象。
一些先进的、功能强大的工业CT后处理软件在所有的这些革命性变化中发挥了重要作用,并越来越多地引导着工业CT技术的应用。
1 三维重建软件的功能工业CT三维重建软件一般包括如下几个方面的功能:1)三维数据重构与显示。
工件可进行空间移动、旋转、放大、缩小、剖切,在不同的断层位置都可以形成切剖后新的三维模型,实现实时的三维图像可视化。
高速时域OCT系统软件及三维重建软件的实现的开题报告一、选题背景和意义高速时域光学相干层析成像(高速时域OCT)技术是一种非侵入性的图像成像技术,能够快速获取包含物体结构和生物组织内部微观结构等信息的高质量三维图像。
该技术已广泛应用于医学、生物医学、化学等领域。
近年来,OCT技术发展迅速,促使OCT系统的软件及三维重建软件的实现不断提高。
因此,本文选取高速时域OCT系统软件及三维重建软件的实现作为课题研究,旨在探讨高速时域OCT的原理和基础知识,实现基于高速时域OCT的三维重建软件,为OCT技术的应用提供更多的理论和实践支持。
二、研究内容和方法本文主要分为两部分:1. 高速时域OCT系统软件的实现高速时域OCT系统软件的实现主要包括采集光信号、进行光谱分析和数据处理等方面。
该部分主要方法包括利用光学干涉原理,实现OCT光谱分析和信号采集。
同时,通过设计图像处理算法和数据分析方法,实现对采集到的数据进行预处理、去噪和提取等操作,得到高质量的三维图像。
2. 基于高速时域OCT的三维重建软件实现基于高速时域OCT的三维重建软件实现主要包括三维图像重建和可视化等方面。
该部分主要方法包括利用高速OCT采集到的数据,构建三维图像模型,并通过计算机图像处理技术进行重建。
同时,通过设计可视化软件,实现三维图像数据的可视化、交互性操作和分析等。
三、预期目标和意义本文预期达到以下目标:1. 深入理解高速时域OCT技术的原理和基础知识。
2. 实现基于高速时域OCT的三维重建软件。
3. 探索高速时域OCT技术在医学、生物医学、化学等领域的应用。
本研究的意义在于:1. 提高高速时域OCT技术的应用能力。
2. 探索高速时域OCT技术在科学研究和生命科学领域的价值,从而推进这些领域的发展。
3. 为高速时域OCT技术的未来发展指明方向。
四、论文结构本文将分为以下几个部分:第一章:绪论主要介绍研究选题背景、意义、研究内容和方法、预期目标及意义等。