家用清洁机器人设计
- 格式:doc
- 大小:506.50 KB
- 文档页数:29
家用清扫机器人的结构设计在现代快节奏的生活中,人们对于家居清洁的需求日益增长,家用清扫机器人应运而生。
它的出现为人们节省了时间和精力,让家居清洁变得更加轻松便捷。
而其出色的清扫性能,很大程度上取决于其精心设计的结构。
家用清扫机器人通常由多个关键部分组成,包括机身外壳、驱动系统、清扫系统、吸尘系统、感知系统和控制系统等。
机身外壳不仅是机器人的“外衣”,起到保护内部零部件的作用,还影响着机器人的外观造型和尺寸大小。
为了适应不同家居环境,其外形一般设计得较为紧凑和圆润,以方便在家具之间穿梭自如。
同时,外壳材料通常选择耐磨、耐刮擦且具有一定强度的塑料或合金,既要保证美观,又要经久耐用。
驱动系统是家用清扫机器人能够自由移动的关键。
它一般由驱动轮、电机和传动装置组成。
驱动轮的设计要考虑到地面的摩擦力和稳定性,通常采用橡胶材质,以增加与地面的抓地力,确保机器人在清扫过程中不会打滑。
电机则提供动力,其性能直接影响机器人的移动速度和续航能力。
传动装置则将电机的动力传递到驱动轮上,常见的有齿轮传动和皮带传动,需要具备高效、低噪音和稳定的特点。
清扫系统是家用清扫机器人实现清洁功能的核心部分。
常见的清扫方式有滚刷清扫和双边刷清扫。
滚刷通常由刷毛和轴组成,通过高速旋转来扫起地面上的灰尘和杂物。
刷毛的材质和密度会影响清扫效果,一般采用柔软但有一定弹性的尼龙材质,既能有效地清扫灰尘,又不会损伤地面。
双边刷则位于机器人的前方两侧,通过旋转将杂物聚拢到机器人的吸尘口附近,提高吸尘效率。
吸尘系统负责将清扫起来的灰尘和杂物吸入储存容器中。
它主要由吸尘风机、吸尘通道和集尘盒组成。
吸尘风机产生强大的吸力,通过吸尘通道将灰尘和杂物吸入集尘盒。
吸尘通道的设计要确保气流顺畅,减少阻力,以提高吸尘效率。
集尘盒的容量大小决定了机器人一次能够清扫的面积,通常需要定期清理集尘盒,以保证吸尘效果。
感知系统让家用清扫机器人能够“感知”周围环境,从而避免碰撞和实现智能清扫。
一种室内屋顶清洁机器人的设计与制作室内屋顶清洁机器人是一种用于室内环境中清洁屋顶的机器人装置。
室内清洁机器人的设计与制作需要考虑机器人的尺寸、携带的清洁装置和清洁方式等方面的因素。
首先,对于室内屋顶清洁机器人的尺寸设计,需要考虑机器人在室内环境中的灵活性和可操作性。
室内空间通常有限,因此机器人的尺寸应该尽可能小,以便能够适应各种室内环境。
此外,机器人的高度应该被设计为足够低,以便能够在屋顶的高度上进行操作。
其次,室内屋顶清洁机器人的清洁装置需要考虑到屋顶表面的材质和清洁的难度。
室内屋顶通常使用各种不同材质,例如,玻璃、铝、塑料等。
清洁机器人的装置应该根据不同材质的屋顶表面进行自适应调整,以确保清洁效果和屋顶表面的安全。
同时,清洁装置应该包括刷子和吸尘器等组件,以便能够清洁不同形式的污垢和灰尘。
第三,室内屋顶清洁机器人的清洁方式也是设计与制作中的重要因素。
传统的清洁方式主要是人工清洁,但这种方式效率低下、耗时长并且工作风险高。
因此,自动清洁方式是室内屋顶清洁机器人的一种合适选择。
自动清洁方式可以通过无线通信技术和传感器等设备与机器人进行沟通,实时控制机器人的运动和清洁计划,提高清洁效率和准确性。
最后,在室内屋顶清洁机器人的制作过程中,需要配置相应的电子设备和控制系统。
电子设备主要包括传感器模块、嵌入式系统、无线通信设备等。
传感器模块通过感知机器人周围的环境,提供实时数据供嵌入式系统进行分析和决策。
同时,嵌入式系统负责控制机器人的运动、清洁设备等,并通过无线通信设备和外部控制中心进行通信。
控制系统可以通过远程控制、自主决策等方式实现对机器人的控制。
综上所述,设计与制作室内屋顶清洁机器人需要综合考虑机器人的尺寸、清洁装置和清洁方式等因素。
通过合理的设计和制作,室内屋顶清洁机器人能够实现高效、准确的清洁效果,提升室内环境的质量和居住舒适度。
同时,室内屋顶清洁机器人的研发和应用也有助于提高清洁效率、减少工作风险,并在未来的智能家居和机器人领域具有广阔的应用前景。
家用清洁机器人毕业设计家用清洁机器人毕业设计随着科技的不断进步,家用清洁机器人逐渐成为人们生活中的一部分。
这些智能机器人能够自动清扫地板、擦洗窗户、整理杂物等,为人们的生活带来了极大的便利。
在本文中,我将探讨家用清洁机器人的毕业设计,旨在提高其功能和性能,以满足人们对清洁的需求。
首先,家用清洁机器人的设计应注重其清洁效果。
机器人应具备强大的吸尘和擦洗能力,能够有效地清除地板上的灰尘和污渍。
此外,机器人还应具备辨识能力,能够识别地板上的不同材质,并根据不同材质采取相应的清洁方式。
例如,对于木地板,机器人应采用柔和的清洁方式,以避免刮伤地板表面。
其次,家用清洁机器人的设计还应考虑到其对家居环境的适应性。
机器人应具备智能避障能力,能够自主规避家中的障碍物,如家具、地毯等。
此外,机器人还应具备定位和导航能力,能够准确识别家居环境的布局,并根据需要进行清洁。
例如,机器人应能够识别出厨房和卫生间等高污染区域,并加强清洁力度。
另外,家用清洁机器人的设计还应注重其智能化和人机交互功能。
机器人应具备语音识别和语音合成功能,能够听懂人们的指令,并回应相应的动作。
此外,机器人还应具备远程控制功能,使用户能够通过手机或其他设备远程操控机器人的工作。
这样,即使在外出时,用户也能够随时随地控制机器人进行清洁。
除了上述功能外,家用清洁机器人的设计还应考虑到其能源消耗和环保性。
机器人应采用高效节能的电池或电源系统,以减少能源消耗并延长使用时间。
此外,机器人还应具备智能充电功能,能够自动返回充电座进行充电。
同时,机器人的清洁过程应尽量减少对环境的污染,例如采用可循环使用的清洁布或刷子。
最后,家用清洁机器人的设计还应考虑到其外观设计和人性化功能。
机器人的外观应简洁大方,符合人们的审美需求。
此外,机器人还应具备一定的娱乐功能,如播放音乐、讲故事等,以增加人机互动的乐趣。
综上所述,家用清洁机器人的毕业设计应注重其清洁效果、适应性、智能化、能源消耗和环保性、外观设计和人性化功能等方面。

1 前言1.1 课题设计背景和题目要求近年来,随着计算机技术与人工智能科学的飞速发展,智能机器人技术逐渐成为现代机器人研究领域的热点。
其中,服务机器人开辟了机器人应用的新领域。
服务机器人的出现主要有三大原因:一是劳动力成本的上升;二是人类想摆脱枯燥乏味的体力劳动,如清洁、家务、照顾病人等;三是人口的老龄和社会福利制度的完善也为某些服务机器人提供了广泛的市场应用前景。
服务机器人区别于工业机器人的一个主要特征就是服务机器人是一种适用于具体的方式、环境及任务过程的机器人系统,其活动空间大,具有在非结构环境下的移动性,因此服务机器人大多数是移动机器人。
自动进行房间地面清洁的自主吸尘式家庭服务机器人,集机械学、电子技术、传感器技术、计算机技术、控制技术、机器人技术、人工智能等诸多学科为一体。
自主吸尘机器人作为智能移动机器人实用化发展的先行者,其研究始于20 世纪80 年代,到目前为止,已经产生了一些概念样机和产品。
吸尘机器人的发展,带动了家庭服务机器人行业的发展,也促进了移动机器人技术、图像和语音识别、传感器等相关技术的发展本次设计的题目<< 家庭清洁机器人>>就是在这种背景下提出的,其具体设计要求如下:设计家庭清洁机器人的工作内容和要求:运行机构形式:轮式最高行进速度:0.5 m/s 转弯半径:0 高度:<100mm 宽度:<400mm 清洁方式:吸尘、刷扫一次充电连续工作时间:0.5 小时警示方式:LED 闪光具有自动路径规划、避障功能具有自动充电装置。
1.2 国内外相关产品研究学海无涯苦作舟!地面清洁机器人作为智能移动机器人实用化发展的先行者,其研究始于 世纪80年代,到目前为止,已经产生了一些概念样机和产品。
吸尘机器人的发 展,带动了家庭服务机器人行业的发展,也促进了移动机器人技术、图像和语音 识别、传感器等相关技术的发展。
现结合国内外的文献将清扫机器人及其自动充 电技术的发展现状阐述如下。
清洁机器人毕业设计清洁机器人毕业设计引言:在现代社会中,科技的发展已经深入到了各个领域。
人们对于生活品质的要求也越来越高,其中一个重要的方面就是家居环境的清洁与卫生。
为了满足人们的需求,越来越多的家庭开始使用清洁机器人来代替传统的清洁方式。
本文将探讨清洁机器人的设计与应用,以及在毕业设计中如何进行相关研究。
一、清洁机器人的设计原理清洁机器人是一种智能化的机器人,通过搭载各种传感器和执行器,能够自主地进行家居清洁工作。
其设计原理主要包括以下几个方面:1. 传感器技术:清洁机器人通常搭载多种传感器,如红外线传感器、摄像头、声音传感器等。
这些传感器可以帮助机器人感知周围环境,识别家具、墙壁等障碍物,并根据实时数据进行路径规划和避障。
2. 定位与导航技术:清洁机器人需要具备准确的定位和导航能力,以便在清洁过程中不会迷失方向或重复清洁。
常用的定位与导航技术包括激光导航、视觉导航和惯性导航等,可以根据具体需求选择合适的技术方案。
3. 清洁器具与执行器:清洁机器人需要搭载各种清洁器具和执行器,如吸尘器、拖地器等。
这些器具需要具备高效的清洁能力,并能够自主地根据不同的清洁任务进行切换和调整。
二、清洁机器人的应用场景清洁机器人在家庭和办公场所等环境中有着广泛的应用。
以下是几个常见的应用场景:1. 家庭清洁:清洁机器人可以代替人工进行家庭清洁工作,如吸尘、拖地、擦窗等。
它们可以根据家庭成员的习惯和需求,自动规划清洁路径,保持家居环境的整洁和卫生。
2. 办公环境清洁:办公楼、商场等公共场所通常需要定期进行清洁工作,而清洁机器人可以在非工作时间进行清洁,避免人员流动对正常工作造成干扰。
3. 医院卫生:医院是一个对卫生要求极高的场所,清洁机器人可以在医院的走廊、病房等区域进行清洁工作,减少人员接触,降低交叉感染的风险。
三、毕业设计中的研究方向在进行清洁机器人毕业设计时,可以选择以下几个研究方向:1. 清洁机器人的路径规划算法研究:路径规划是清洁机器人设计中的一个核心问题。
1.清洁机器人总体设计(采用模块化设计方法)1.1机器人外形设计根据家庭清洁机器人的设计要求,保洁机器人应该包括行走机构、吸尘机构、清扫机构、垃圾收集处理机构,其中清扫机构的设计尤为重要。
通过在网上搜索一些相关资料以及在图书馆查阅的资料,发现周边有棱角的机器人在躲避障碍物是很不便,非常容易碰到障碍物,而圆形物体则比较容易避开障碍物。
因而最终把机器人的外形设计为圆盘形。
1.2机器人的行走机构设计为实现机器人的0半径转弯,在机器人的行走机构中采用两轮独立驱动,两个驱动轮对称分布在清扫机构的后方,两个后轮和前轮(较低的万向轮)支撑机体工作和运动,这样设计既节省材料,又可以使刷子和地面全面的接触,从而利于更彻底的清扫。
在机器人转弯时,通过控制行走机构的两个电机的转速及旋转方向,进而控制两个轮子,通过轮子的前后差速运动实现机体的转弯半径为0。
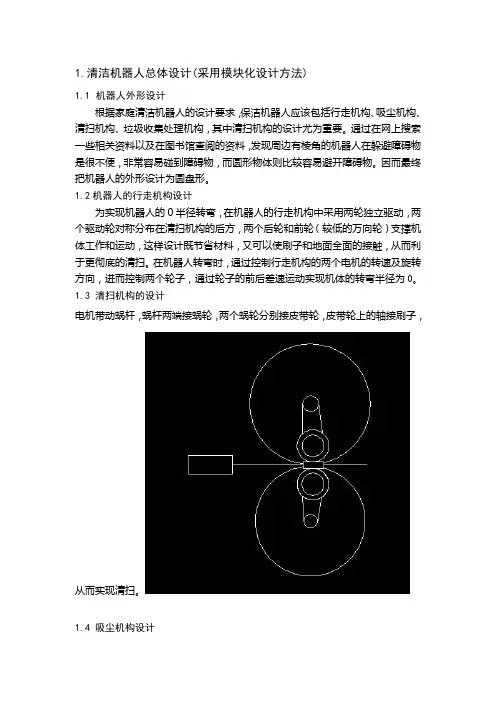
1.3 清扫机构的设计电机带动蜗杆,蜗杆两端接蜗轮,两个蜗轮分别接皮带轮,皮带轮上的轴接刷子,从而实现清扫。
1.4 吸尘机构设计r在吸尘机构的设计中将风扇固定在垃圾储藏室上壁,在风扇上罩一个薄壁腔。
在薄壁腔上方开一个圆孔,以便于空气的排出。
在垃圾储藏室上壁开两个小长方孔,在方孔下加上一个隔尘罩。
(其大体图形如上图所示)通过风扇的旋转带动垃圾储藏室内的空气流动,又通过储藏室内的管腔将刷子清扫引起的尘土吸附进来,带尘土的空气通过防尘罩将尘土挡到垃圾储物室内,较干净的空气则通过吸尘室上壁腔的圆孔排带大气中去。
从而实现吸尘的目的。
3.2.5 垃圾收集处理机构设计通过电机带动和电机相连的小齿轮,小齿轮通过带动和其配对的大齿轮带动轴2 旋转,从而使轴2另一端上固定的大齿轮带动和其相连的小齿轮旋转,进而使垃圾收集挡板作扬起动作,将垃圾倒入其后面的垃圾储藏室。
垃圾收集挡板的扬起放下动作通过控制电机的正反转来控制。
但是此种结构所占的空间比较大,所示设计的家庭清洁机器人空间有限,故这种结构设计还有待于进一步改进。

家用清扫的结构设计家用清扫的结构设计一:引言家用清扫是一种智能化的家居,能够自动清扫地面上的灰尘和垃圾。
本文将详细介绍家用清扫的结构设计,包括的外观设计、控制系统、传感器、清扫机构等。
二:外观设计1. 尺寸与外形家用清扫需要具备足够的尺寸和外形,以便在各种居家环境中自由移动和清扫。
通常采用圆形或方形的外形设计,并具备合适的直径或边长。
2. 外壳材料外壳应采用高强度、耐磨损的材料,如ABS塑料或铝合金等。
外壳表面设计要光滑易清洁,以方便日常维护。
3. 底部设计底部应设计成平整且光滑的结构,以确保在地面上的稳定移动和清扫效果。
同时,底部还应安装清扫刷和集尘箱等清扫机构。
三:控制系统1. 主控芯片家用清扫的控制系统采用嵌入式主控芯片,具备高速运算和强大的数据处理能力。
常用的主控芯片有ARM、DSP等。
2. 电源管理控制系统应具备合理的电源管理能力,包括电池充电管理、电池容量检测、电源供电自动切换等功能。
3. 通信模块为了实现与用户的交互和远程控制功能,控制系统需要配置无线通信模块,如Wi-Fi或蓝牙模块。
同时,还需要具备数据加密和安全传输的功能。
四:传感器1. 碰撞传感器为了避免与障碍物碰撞,需要配置碰撞传感器。
常用的碰撞传感器有红外线传感器和超声波传感器。
2. 跌落传感器为了避免从楼梯等高处坠落,需要配置跌落传感器。
常用的跌落传感器有红外线传感器和压敏传感器。
3. 地面传感器为了识别不同地面的类型和硬度,需要配置地面传感器。
常用的地面传感器有红外线传感器和电容传感器。
五:清扫机构1. 清扫刷底部应配备高效的清扫刷,能够有效清除地面上的灰尘和垃圾。
常用的清扫刷有旋转刷和滚刷。
2. 集尘箱清扫刷将灰尘和垃圾刷进集尘箱,在集尘箱内部进行存储。
集尘箱需要具备一定的容量和密封性能。
3. 过滤系统清扫还需要配置过滤系统,能够对收集的灰尘和垃圾进行过滤,以保持空气的清洁。
常用的过滤系统有滤网和高效过滤器。
六:附件本文档附件包括家用清扫的外观设计图纸、控制系统原理图、传感器连接图和清扫机构示意图等。
清洁机器人毕业设计清洁机器人毕业设计随着科技的快速发展,人们的生活变得越来越便利。
其中,清洁机器人的出现为我们的生活带来了很大的便利。
本文将探讨清洁机器人的毕业设计,介绍其功能、原理以及未来的发展方向。
一、清洁机器人的功能清洁机器人是一种能够自动进行清洁工作的智能设备。
它能够代替人类进行家庭和办公场所的清洁工作,如扫地、擦窗、拖地等。
清洁机器人的主要功能包括:1. 自动识别和规划清洁路径:清洁机器人配备了先进的传感器和导航系统,能够自动识别房间的布局,并规划最优的清洁路径,以提高清洁效率。
2. 扫地和拖地功能:清洁机器人配备了吸尘器和拖把,能够自动清理地板上的灰尘和污渍。
3. 擦窗功能:一些高端的清洁机器人还具备擦窗功能,能够自动清洁窗户表面的污渍,减轻人们的劳动负担。
4. 自动充电功能:清洁机器人配备了充电座,当电量低时,它会自动返回充电座进行充电,无需人工干预。
二、清洁机器人的工作原理清洁机器人的工作原理主要包括传感器、导航系统和清洁装置。
1. 传感器:清洁机器人配备了多种传感器,如红外线传感器、超声波传感器和摄像头等。
这些传感器能够感知周围环境,识别障碍物和墙壁,并根据传感器的反馈信息调整清洁路径。
2. 导航系统:清洁机器人利用导航系统确定自身的位置,并规划最优的清洁路径。
导航系统可以使用激光导航、视觉导航或者惯性导航等技术。
3. 清洁装置:清洁机器人的清洁装置包括吸尘器、拖把和擦窗器等。
这些清洁装置能够根据不同的清洁任务进行切换,并利用机器人的运动轨迹进行清洁。
三、清洁机器人的未来发展方向清洁机器人作为智能家居的一部分,未来有着广阔的发展前景。
以下是清洁机器人未来的发展方向:1. 智能化:未来的清洁机器人将更加智能化,能够通过学习和适应不同环境,提供个性化的清洁服务。
它们将能够根据用户的需求自动调整清洁路径和清洁方式。
2. 多功能化:清洁机器人将不仅仅局限于扫地和拖地的功能,还将具备更多的清洁功能,如擦窗、清洗卫生间等。
智能家庭保洁机器人研究与设计近年来,随着人们生活质量的提高和家居环境的不断变化,智能家电得到了越来越广泛的应用。
其中,智能家庭保洁机器人也成为了人们理想生活的一部分。
智能家庭保洁机器人作为一种代替人类清扫家务的机器人,其研究和设计已经成为了一个重要的课题。
一、智能家庭保洁机器人的研究现状目前,智能家庭保洁机器人已经广泛应用于家庭环境中。
这类机器人能够根据环境数据和机器人视觉系统自主进行清扫、拖洗、吸尘等多项清洁工作。
与传统的吸尘器和扫地机相比,智能家庭保洁机器人的优势在于具有智能化、自主性和高效性等方面的特点。
智能家庭保洁机器人的研究现状主要体现在三个方面:1.机器人导航与智能识别技术的研究智能家庭保洁机器人最重要的是其导航和智能识别技术,这种技术涉及到大量的机器人技术和人工智能算法,包括图像处理、机器学习、路径规划等领域,这就需要研究者具有深厚的机器人技术和编程能力。
2.机器人传感器技术与硬件设计智能家庭保洁机器人的传感器技术也是其核心之一,包括超声波传感器、视觉传感器、基于惯性的传感器等,这些传感器的作用在于获取机器人周围环境的数据信息,用于机器人识别和规划清洁路线。
该领域也需要研究者具备扎实的硬件维护和改进能力。
3.机器人智能化控制技术机器人智能化控制技术的研究是智能家庭保洁机器人的关键性因素,其主要涉及到控制理论、自适应控制、PID控制等领域。
该领域的研究所需要的是研究者具备扎实的控制和计算机优化能力。
二、智能家庭保洁机器人的设计与应用为了让智能家庭保洁机器人能够更好地应用于家庭环境中,需要对其进行设计和应用。
智能家庭保洁机器人的设计与应用涉及到多个方面,下面分别进行探讨:1.机器人吸尘模块设计智能家庭保洁机器人的主要功能是清洁,其中吸尘模块是其最核心的功能之一,吸尘模块的设计将直接影响到机器人的性能和清洁效果。
其设计所遵循的需求是吸尘模块的高效性、低噪音、充电便捷、持久性等多方面的要求。
家庭保洁机器人的设计与研究近年来,随着科技的快速发展,智能家居越来越多的被人们所关注和应用。
作为家庭保洁的一个重要组成部分,家庭保洁机器人的设计和研究成为了科技领域的一个热点。
本文将从机器人的功能需求、设计原则、技术特点等几个方面谈家庭保洁机器人的设计与研究。
一、家庭保洁机器人的功能需求家庭保洁机器人的最大功能需求就是自动化。
家庭保洁机器人应该有智能化、自动化、全方位的功能,可以随时保持房间的整洁干净。
同时,家庭机器人还应该具备多样化的功能,比如可以扫地、拖地、清洗厨房卫生间等多种功能,并且具备智能识别垃圾、自动分类垃圾等功能。
此外,家庭保洁机器人还可以智能感应、实时监控、远程控制等功能,满足用户的各种需求。
二、家庭保洁机器人的设计原则家庭保洁机器人的设计应该遵循简洁、实用、易维护的原则。
设计人员应该注重机器人的实用性和易用性,保证机器人的功能尽可能地实用。
在机器人的设计中,还应该注重机器人的易维护性,设计尽量简洁明了,容易维护和修理。
三、家庭保洁机器人的技术特点家庭保洁机器人的技术特点主要包括视觉、语音、传感器等技术的应用。
视觉技术可以通过摄像头、激光雷达等实现机器人对房间布局、家具摆放等环境信息的感知。
语音技术可以实现与机器人的即时交流,包括命令下达、语音核实等,提高机器人的智能交互性。
传感器技术可以为机器人提供一系列的数据指标,比如说光线、温度、湿度等,更好地模拟人类工作。
四、家庭保洁机器人的具体研究内容针对家庭保洁机器人的研究可以从以下几个方面开展:1. 机器人视觉感知技术的应用研究,实现机器人对环境的三维建模和地图绘制。
2. 机器人语音交互技术的研究,实现机器人与用户的更好互动。
3. 机器人智能控制技术的研究,利用首选算法对机器人的动作、路径进行规划和执行。
4. 机器人环境感知技术的研究,实现机器人对环境变化的实时监控,从而更好地适应变化。
5. 机器人物体识别和定位技术的研究,实现机器人对家具、家居器材的识别与定位,更好地实现保洁。
智能清洁机器人设计第一篇:智能清洁机器人设计传感器应用——智能清洁机器人设计成员及分工:指导老师:徐晓冬智能清洁机器人设计测控技术与仪器(2)班 CK Star 摘要:智能清洁机器人是内置智能芯片,能自动识别判断家庭环境,计算行走路径,自动清扫地面上的灰尘,自动清理毛发和碎物,低电压自动返回充电。
智能清洁机器人具有智能计算机系统、自动螺旋导航系统和传感器感应头。
可以对房间做出测量,自动清洁房间的每个角落、记录您的理想设置,避让墙壁、楼梯等障碍物,即使您把放到桌子上面它也不会掉下来。
随机配备的虚拟墙发射器可有效地阻止它进入您不想让它进入的地方。
适用范围:家庭,办公室,电脑房,可以有效清扫各种木地板、水泥地板、瓷砖地板以及短毛地毯。
采用全新智能控制系统,自动清扫,自动回充,智能分析,路径规划,智能防撞,以及遥控的功能,最终实现卫生清洁、空气净化加湿的效果。
关键词:传感器清洁机器人智能控制单片机系统目录一、背景及意义 (3)二、国内外研究现状 (3)三、总体功能 (4)四、工作主流程图 (5)五、各模块设计 (6)1、传感部分........................................................................................6 1)超声波传感器............................................................................6 2)红外测距传感器........................................................................7 3)接触式传感器............................................................................7 4)红外光电传感器 (7)2、控制部分 (8)3、驱动部分 (8)4、全方位移动机构 (9)5、吸尘及处理部分 (9)6、垃圾收集过程流程图 (11)7、电源部分 (11)六、性能参数 (12)七、结论与展望......................................................................................13 参考文献.. (14)一、背景及意义随着人们生活水平的提高,健康、舒适的家居环境越来越被更多的人所关注。
智能家居系统中的家庭卫生保洁机器人设计智能家居系统已成为现代生活中不可或缺的一部分。
在这个快节奏的社会中,人们对家庭卫生的要求越来越高,但时间和精力有限,无法完全满足这一需求。
为了解决这个问题,家庭卫生保洁机器人应运而生。
本文将就智能家居系统中的家庭卫生保洁机器人进行设计和讨论。
一、机器人功能与特点家庭卫生保洁机器人设计的首要任务是提供高效、全面的清洁服务,为家庭创造干净和舒适的环境。
基于这一目标,我们首先需要确定机器人的功能与特点。
1.1 自动清洁功能家庭卫生保洁机器人应具备自动清洁功能,可以在设定的时间自觉地进行清洁工作。
通过搭载环境感知技术,机器人能够自动辨识不同的地面材质和家具器具,并根据情况选择适当的清洁方式,如扫地、擦地、吸尘等。
1.2 全面的清洁覆盖为了能够提供全面的清洁覆盖,机器人需要配备多种传感器与清洁工具。
例如,激光雷达传感器可以帮助机器人进行环境地图的建立,使其能够精准地规划清洁路径。
同时,底部配备的刷子和吸尘器能够有效清除地板上的尘埃和脏污,确保家居环境的整洁与卫生。
1.3 智能化的操作与控制为了提高用户体验,机器人应具备智能化的操作与控制系统。
例如,用户可以通过智能手机或智能音箱等设备远程操控机器人,并进行清洁计划的设置与调整。
此外,机器人还可以通过语音识别技术与用户进行交流,了解用户的需求和指示,从而更好地完成清洁任务。
1.4 安全与防护机制在家庭环境中,安全性是至关重要的一点。
为了保证机器人在使用过程中的安全性,设计者应该加入相应的安全与防护机制。
例如,机器人应具备避障功能,能够自动避开障碍物,防止与家具或其他物品发生碰撞。
此外,机器人还应具备防止高台跌落的功能,以避免意外损坏。
二、机器人设计与结构2.1 外形设计家庭卫生保洁机器人的外形设计应该符合家居环境的审美需求,以提高用户对产品的接受度。
机器人的外形可以设计得简洁、圆润,便于在房间中自由移动。
同时,机器人的颜色可根据用户的喜好进行选择,以增加产品的个性化特点。
目录摘要 (1)第一章前言1.1题目要求 (3)1.2国内外产品研究状况 (4)1.2.1 国外产品研究状况 (4)1.2.2 国内产品研究状况 (9)1.2.3 自主充电技术研究现状 (10)1.3研究的目的和意义 (11)1.4设计的重点和难点 (11)第二章家庭清洁机器人的关键技术2.1传感技术 (12)2.2路径规划技术 (12)2.3吸尘技术 (12)2.4电源技术 (13)第三章清洁机器人的机械设计3.1机械结构组成和工作原理 (13)3.1.1 机械结构组成 (14)3.1.2 工作原理 (16)3.2清洁机器人总体设计 (17)3.2.1 机器人外形设计 (17)3.2.2 机器人的行走机构设计 (18)3.2.3 清扫机构的设计 (18)3.2.4 吸尘机构设计 (21)3.2.5 垃圾收集处理机构设计 (22)第四章具体计算4.1电机选择 (24)4.2 蜗轮蜗杆的选择 (25)4.3 清扫机构电机的选择 (26)4.4 家用清扫机器人电池的选用 (26)4.5 清扫机构中蜗杆上轴承的寿命的计算 (27)4.6 清扫机构中涡轮轴的校核 (28)第五章总结和展望5.1 发展趋势 (30)5.1.1 高度智能化 (30)5.1.2 功能扩展 (30)5.1.3 低成本化 (30)5.2展望 (30)参考文献 (31)致谢 (32)附录 (33)外文文献 (33)中文翻译 (40)摘要在即将进入的21世纪,随着蓝天工程的提出,世界各国已经将清洁环保工作提到了相当重要的位置。
在这样的大背景下,推动了中国新一批的清洁工业的迅猛发展,现如今,不同种类的新产品在不断的推出,相关的新设备和新机器也在不断的进行着更新,至深入人们的日常食物,衣物,住宿和出行中。
现如今,人们的物质生活水平已经得到了很大程度上的提高,生活质量也在提升。
接下来人们关注的是环境的舒适性,服务行业里在人们生活中的支出占比已经形成了指数形式提升,同时服务行业中的清洁行业更是成为了当今经济发展的支柱产业。
家庭保洁机器人的智能化设计与研发第一章介绍随着科技的不断进步和人们生活水平的提高,家电产品也变得越来越智能化。
其中,家庭保洁机器人已经成为了现代家庭中不可或缺的一部分。
本文将着重探讨家庭保洁机器人的智能化设计和研发,从硬件和软件两方面来分别进行介绍和讨论。
第二章硬件设计家庭保洁机器人的硬件设计是其智能化的基础。
一方面,机器人需要具备良好的机械结构和传感器系统,以保证其能够稳定地运行和准确地感知周围环境;另一方面,它还需要搭载高性能的处理器,以保证能够对大量的数据进行处理和分析。
2.1 机械结构设计机械结构的设计是家庭保洁机器人的一项重要任务。
首先,机器人需要具备良好的运动控制系统,以保证其能够在室内自由行走,并能够准确地到达目标区域。
同时,机器人还需要具备良好的清洁装置,以保证能够高效清洁地面、地毯和难以到达的地方。
2.2 传感器系统设计传感器系统是家庭保洁机器人的另一个重要设计方向。
机器人需要搭载多种传感器,包括触觉传感器、光学传感器、声学传感器等,以感知周围环境并做出相应的反应。
同时,机器人还需要具备多种定位传感器,包括激光雷达、红外传感器、超声波传感器等,以保证准确的定位和路径规划。
2.3 处理器设计处理器是家庭保洁机器人的核心部件。
机器人需要搭载高性能的处理器,能够快速地处理和分析传感器收集到的数据,并且能够自主地做出决策。
同时,处理器还需要具备良好的通信能力,能够与其他智能设备进行互联,实现更加智能化的服务。
第三章软件设计软件设计是家庭保洁机器人实现智能化的另一个重要环节。
软件设计包括机器人的操作系统、控制算法、路径规划算法、感知和决策算法等。
下面将分别对这些方面进行介绍和讨论。
3.1 操作系统设计机器人的操作系统是其智能化的门户。
操作系统需要具备高度的稳定性、安全性和可扩展性,能够支持多任务处理和多种编程语言,以便开发人员能够在系统上进行快速开发和定制化。
3.2 控制算法设计机器人的控制算法是其自主运动的关键。
目录摘要---------------------------------------------------------------------------------------------------------------------- 1 ABSTRACT -------------------------------------------------------------------------------------------------------------- 1 1 前言------------------------------------------------------------------------------------------------------------------------ 31.1国内外相关产品研究 ------------------------------------------------ 31.1.1国外产品研究情况--------------------------------------------- 31.1.2国内产品研究情况--------------------------------------------- 41.2研究的目的和意义 -------------------------------------------------- 5 2家用清洁机器人的关键技术 ------------------------------------------------------------------------------- 62.1传感技术 ---------------------------------------------------------- 62.2路径规划技术 ------------------------------------------------------ 62.3吸尘技术 ---------------------------------------------------------- 72.4电源技术 ---------------------------------------------------------- 73 家用清洁机器人的机械设计 ------------------------------------------------------------------------------ 83.1机械结构组成 ------------------------------------------------------ 83.2家用清洁机器人的总体设计 ------------------------------------------ 83.2.1外形设计----------------------------------------------------- 83.2.2行走机构设计------------------------------------------------- 83.2.3清扫机构设计------------------------------------------------- 93.2.4吸尘机构设计------------------------------------------------ 104 具体计算 ------------------------------------------------------------------------------------------------------------- 124.1电机选择 --------------------------------------------------------- 124.2蜗轮蜗杆的选择 --------------------------------------------------- 134.3电池的选用 ------------------------------------------------------- 154.4清扫机构中蜗杆上轴承寿命计算 ------------------------------------- 154.5蜗轮轴的校核 ----------------------------------------------------- 175 总结与展望 --------------------------------------------------------------------------------------------------------- 195.1总结 ------------------------------------------------------------- 195.2展望 ------------------------------------------------------------- 19参考文献 ----------------------------------------------------------------------------------------------------------- 21致谢------------------------------------------------------------------------------------------------------------------ 22附录------------------------------------------------------------------------------------------------------------------ 23摘要近年来,随着计算机技术与人工智能科学的飞速发展,智能机器人技术逐渐成为现代机器人研究领域的热点。
其中,服务机器人开辟了机器人应用的新领域,服务机器人的出现主要有三大原因:一是劳动力成本的上升;二是人类想摆脱枯燥乏味的体力劳动,如清洁、家务、照顾病人等;三是人口的老龄化和社会福利制度的完善也为某些服务机器人提供了广泛的市场应用前景。
服务机器人区别于工业机器人的一个主要特征是服务机器人是一种适用于具体的方式、环境及任务过程的机器人系统,其活动空间大,具有在非结构环境下的移动性,因此服务机器人大多数是移动机器人。
随着社会的发展需要,服务机器人已经渗透入了我们的生活、工作和经济方面,并且起到了很大的作用。
服务机器人的研究和发展对我们的经济发展有很多的影响。
这篇文章主要通过阐述清洁机器人在服务行业的重要性,对机器人在各国发展状况的一个综述,让读者了解将来机器人发展对社会发展的重要性。
关键词:机器人;清洁机器人;运动原理;清洁方式ABSTRACTIn recent years, along with the computer technology and the rapid development of artificial intelligence , intelligent robot technology gradually become modern robot research hot spot. Among them, service robot, opened a new field of application of robots.Service robots appeared three main reasons:one is rising labor costs;Second is the human to escape the boring physical labor,such as cleaning, housework and patient care,etc.The population is aged 3 and social welfare system for certain service robots also provides a broad application prospect in the market.Service robots in industrial robots is one of the main features of service robot is a suitable way,environment and the specific tasks of the robot system,the process of large space activities in unstructured environment,has the high mobility,so most of the mobile robot is service robots With the development of society,we service robots have infiltrated the life work and economic aspects,and play a very significant role.Service robot research and development of our economic development has a lot of influence.This article mainly elaborated through cleaning robot in the importance of service industry in the world,robot is reviewed the development of some future robots,let the reader know the importance of the development of social development.Key words:Robots;cleaning robot;sports principle;clean way1 前言1.1国内外相关产品研究地面清洁机器人作为作为智能移动机器人实用化发展的先行者,其研究始于20世纪80年代,到目前为止已经产生了一些概念样机和产品。
吸尘机器人的发展带动了家庭服务机器人行业的发展,也促进了移动机器人技术图像和语音识别传感器等相关技术的发展。