PWM整流器控制框图
- 格式:ppt
- 大小:394.00 KB
- 文档页数:7
三相电压型PWM 整流器建模及控制摘要:本文通过基尔霍夫定律完成了对三相电压型PWM 整流器在三相静止对称坐标系下的数学建模。
并通过MATLAB/SIMULINK 仿真工具对其数学模型进行了仿真验证,可以看出,仿真验证的结果证明了模型的准确性和可靠性。
而后又介绍了一种直接电流控制方法即传统的双闭环PID 控制,并进行了仿真分析。
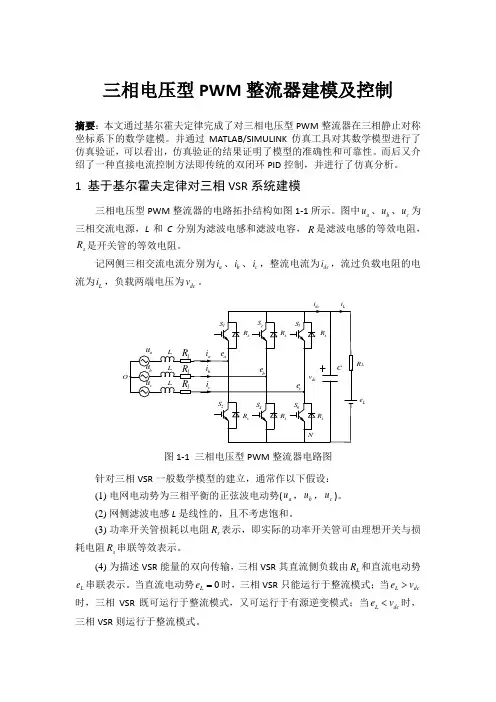
1 基于基尔霍夫定律对三相VSR 系统建模三相电压型PWM 整流器的电路拓扑结构如图1-1所示。
图中a u 、b u 、c u 为三相交流电源,L 和C 分别为滤波电感和滤波电容,R 是滤波电感的等效电阻,s R 是开关管的等效电阻。
记网侧三相交流电流分别为a i 、b i 、c i ,整流电流为dc i ,流过负载电阻的电流为L i ,负载两端电压为dc v 。
i Le i L图1-1 三相电压型PWM 整流器电路图针对三相VSR 一般数学模型的建立,通常作以下假设: (1) 电网电动势为三相平衡的正弦波电动势(a u ,b u ,c u )。
(2) 网侧滤波电感L 是线性的,且不考虑饱和。
(3) 功率开关管损耗以电阻s R 表示,即实际的功率开关管可由理想开关与损耗电阻s R 串联等效表示。
(4) 为描述VSR 能量的双向传输,三相VSR 其直流侧负载由L R 和直流电动势L e 串联表示。
当直流电动势0L e =时,三相VSR 只能运行于整流模式;当L dce v >时,三相VSR 既可运行于整流模式,又可运行于有源逆变模式;当L dc e v <时,三相VSR 则运行于整流模式。
为分析方便,定义单极性二值逻辑开关函数k s 为10k s ⎧=⎨⎩上桥臂导通,下桥臂关断上桥臂关断,下桥臂导通(,,)k a b c = (1-1)将三相VSR 功率开关管损耗等效电阻s R 和交流滤波电感等效电阻l R 合并,记 s l R R R =+,采用基尔霍夫电压定律建立三相VSR a 相回路方程为()aa a aN NO di LRi u v v dt+=-+ (1-2) 当1S 导通而2S 关断时,1a s =,且aN dc v v =;当1S 关断而2S 导通时,开关函数0a s =,且0aN v =。
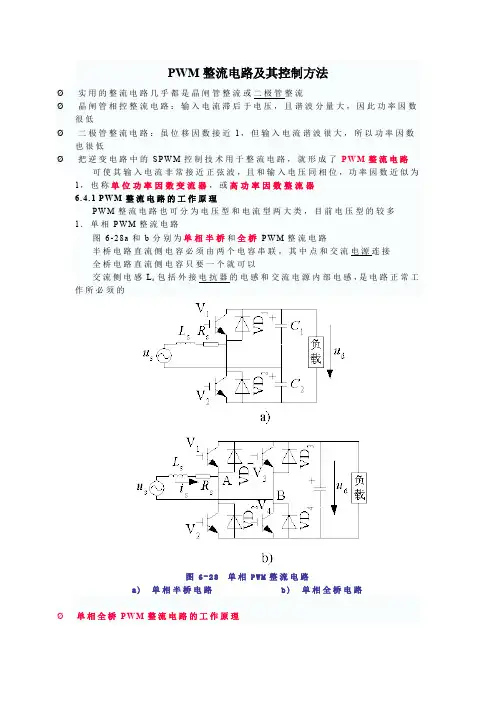
PWM整流电路及其控制方法Ø 实用的整流电路几乎都是晶闸管整流或二极管整流Ø 晶闸管相控整流电路:输入电流滞后于电压,且谐波分量大,因此功率因数很低Ø 二极管整流电路:虽位移因数接近1,但输入电流谐波很大,所以功率因数也很低Ø 把逆变电路中的S P W M控制技术用于整流电路,就形成了P W M整流电路可使其输入电流非常接近正弦波,且和输入电压同相位,功率因数近似为1,也称单位功率因数变流器,或高功率因数整流器6.4.1 P WM整流电路的工作原理P W M整流电路也可分为电压型和电流型两大类,目前电压型的较多1.单相P W M整流电路图6-28a和b分别为单相半桥和全桥P W M整流电路半桥电路直流侧电容必须由两个电容串联,其中点和交流电源连接全桥电路直流侧电容只要一个就可以交流侧电感L s包括外接电抗器的电感和交流电源内部电感,是电路正常工作所必须的图6-28单相P W M整流电路a)单相半桥电路b)单相全桥电路Ø 单相全桥P WM整流电路的工作原理正弦信号波和三角波相比较的方法对V1~V4进行SP W M控制,就可在交流输入端AB产生SP W M波u A Bu A B中含有和信号波同频率且幅值成比例的基波、和载波有关的高频谐波,不含低次谐波由于L s的滤波作用,谐波电压只使i s产生很小的脉动当信号波频率和电源频率相同时,i s也为与电源频率相同的正弦波u s一定时,i s幅值和相位仅由u A B中基波u A B f的幅值及其与u s的相位差决定改变u A B f的幅值和相位,可使i s和u s同相或反相,i s比u s超前90°,或i s 与u s相位差为所需角度Ø 相量图(图6-29)a:滞后相角d,和同相,整流状态,功率因数为1,P W M 整流电路最基本的工作状态b:超前相角d,和反相,逆变状态,说明P W M整流电路可实现能量正反两方向流动,这一特点对于需再生制动的交流电动机调速系统很重要c:滞后相角d,超前90°,电路向交流电源送出无功功率,这时称为静止无功功率发送器(Sta t ic V a r Ge ne r a to r—SV G)d:通过对幅值和相位的控制,可以使比超前或滞后任一角度j图6-29P W M整流电路的运行方式相量图a)整流运行b)逆变运行c)无功补偿运行d)超前角为Ø 对单相全桥P WM整流电路工作原理的进一步说明整流状态下u s> 0时,(V2、V D4、V D1、L s)和(V3、V D1、V D4、L s)分别组成两个升压斩波电路,以(V2、V D4、V D1、L s)为例V2通时,u s通过V2、V D4向L s储能V2关断时,L s中的储能通过V D1、V D4向C充电u s< 0时,(V1、V D3、V D2、L s)和(V4、V D2、V D3、L s)分别组成两个升压斩波电路由于是按升压斩波电路工作,如控制不当,直流侧电容电压可能比交流电压峰值高出许多倍,对器件形成威胁另一方面,如直流侧电压过低,例如低于u s的峰值,则u A B中就得不到图6-29a中所需的足够高的基波电压幅值,或u A B中含有较大的低次谐波,这样就不能按需要控制i s,i s波形会畸变可见,电压型P W M整流电路是升压型整流电路,其输出直流电压可从交流电源电压峰值附近向高调节,如要向低调节就会使性能恶化,以至不能工作。
三相高功率因数脉宽调制(PWM)整流器具有交流侧输入电流趋于正弦化、功率因数高、直流侧输出电压稳定、能量可以回馈等优点[1-2]。
目前,工程上主要采用动态响应快、控制精度高的直接电流控制方法[3-4]。
但因为难以建立合理的简化数学模型,电压外环和电流内环双闭环串联控制的比例积分(PI)调节参数通常经大量实验凭经验确定。
本文在分析PWM整流器工作原理的基础上,引入电源电压作为扰动补偿,建立其简化数学模型,提出双闭环PI调节参数的设计方法,并给出仿真波形和实验结果。
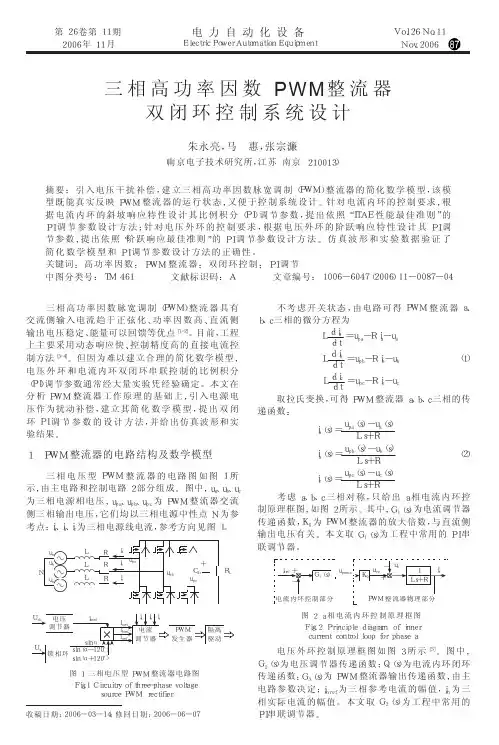
1PWM整流器的电路结构及数学模型三相电压型PWM整流器的电路图如图1所示,由主电路和控制电路2部分组成。
图中,ua、ub、uc为三相电源相电压,upa、upb、upc为PWM整流器交流侧三相输出电压,它们均以三相电源中性点N为参考点;ia、ib、ic为三相电源线电流,参考方向见图1。
不考虑开关状态,由电路可得PWM整流器a、b、c三相的微分方程为Ldiadt=upa-Ria-uaLdibdt=upb-Rib-ub(1)Ldicdt=upc-Ric-uc取拉氏变换,可得PWM整流器a、b、c三相的传递函数:ia(s)=upa(s)-ua(s)Ls+Rib(s)=upb(s)-ub(s)Ls+R(2)ic(s)=upc(s)-uc(s)Ls+R考虑a、b、c三相对称,只给出a相电流内环控制原理框图,如图2所示。
其中,G1(s)为电流调节器传递函数,K0为PWM整流器的放大倍数,与直流侧输出电压有关。
本文取G1(s)为工程中常用的PI串联调节器。
电压外环控制原理框图如图3所示[5]。
图中,G2(s)为电压调节器传递函数;Q(s)为电流内环闭环传递函数;G3(s)为PWM整流器输出传递函数,由主电路参数决定;imref为三相参考电流的幅值,im为三相实际电流的幅值。
本文取G2(s)为工程中常用的PI串联调节器。
图2a相电流内环控制原理框图Fig.2PrinciplediagramofinnercurrentcontrolloopforphaseaG1(s)K0upa1Ls+Riarefupwmauaia电流内环控制部分PWM整流器物理部分-+-+三相高功率因数PWM 整流器双闭环控制系统设计朱永亮,马惠,张宗濂(南京电子技术研究所,江苏南京210013)摘要:引入电压干扰补偿,建立三相高功率因数脉宽调制(PWM)整流器的简化数学模型,该模型既能真实反映PWM整流器的运行状态,又便于控制系统设计。
毕业设计(论文)题目 PWM整流器的设计学院(系):专业班级:学生姓名:指导教师:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包括任何其他个人或集体已经发表或撰写的成果作品。
本人完全意识到本声明的法律后果由本人承担。
作者签名:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保障、使用学位论文的规定,同意学校保留并向有关学位论文管理部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权省级优秀学士论文评选机构将本学位论文的全部或部分内容编入有关数据进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
本学位论文属于1、保密囗,在10年解密后适用本授权书2、不保密囗。
(请在以上相应方框内打“√”)作者签名:年月日导师签名:年月日本科生毕业设计(论文任务书学生姓名:专业班级:指导教师工作单位设计(论文题目: PWM整流器的设计设计(论文)主要内容:熟悉整流的原理,对整流技术进行综述、比较,并设计出整流器硬件电路和软件程序。
要求完成的主要任务:(1)外文资料翻译不少于20000印刷符;(2)查阅相关文献资料(中文15篇,英文3篇);(3)掌握整流的原理;(4)撰写开题报告;(5)熟悉整流技术国内外的研究现状、目的意义;(6)对整流技术进行综述、比较;(7)计出整流器硬件电路和软件程序。
;(8)绘制的电气图纸符合国标;(9)撰写的毕业设计(论文)不少于10000汉字。
必读参考书:[1] 王兆安,黄俊.电力电子技术.第4版.北京:机械工业大学出版社,2007[2] 杨荫福,段善旭,朝泽云.电力电子装置及系统.北京:清华大学出版社,2006[3]张崇巍,张兴.PWM整流器及其控制.北京:机械工业大学出版社,2003指导教师签名系主任签名院长签名(章本科学生毕业设计(论文)开题报告20世纪90年代发展起来的智能型功率模块(IPM开创了功率半导体开关器件新的发展方向。
图 1 系统总体框图(1)整流滤波模块:对电网输入的交流电进行整流滤波,为变换器提供波纹较小的直流电压。
(2)三相桥式逆变器模块:把直流电压变换成交流电。
其中功率级采用智能型IPM 功率模块,具有电路简单、可靠性高等特点。
(3)LC 滤波模块:滤除干扰和无用信号,使输出信号为标准正弦波。
(4) 控制电路模块:检测输出电压、电流信号后,按照一定的控制算法和控制策略产生 SPWM 控制信号,去控制IPM 开关管的通断从而保持输出电压稳定,同时通过 SPI 接口完成对输入电压信号、电流信号的程控调理。
捕获单元完成对输出信号的测频。
(5) 电压、电流检测模块:根据要求,需要实时检测线电压及相电流的变化,所以需要三路电压检测和三路电流检测电路。
所有的检测信号都经过电压跟随器隔离后由TMS320F28335 的 A/D 通道输入。
基于 DSP 的三相 SPWM 变频电源的设计变频电源作为电源系统的重要组成部分,其性能的优劣直接关系到整个系统的安全和可靠性指标。
现代变频电源以低功 耗、高效率、电路简洁等显著优点而备受青睐。
变频电源的整个电路由交流-直流-交流-滤波等部分构成,输出电压和电流波形均为纯正的正弦波,且频率和幅度在一定范围内可调。
本文实现了基于 TMS320F28335 的变频电源数字控制系统的设计, 通过有效利用 TMS320F28335 丰富的片上硬件资 源,实现了 SPWM 的不规则采样,并采用 PID 算法使系统产生高品质的正弦波,具有运算速度快、精度高、灵活性好、系统扩展能力强等优点。
系统总体介绍根据结构不同,变频电源可分为直接变频电源与间接变频电源两大类。
本文所研究的变频电源采用间接变频结构即 交-直-交变换过程。
首先通过单相全桥整流电路完成交-直变换,然后在 DSP 控制下把直流电源转换成三相 供给后级滤波电路,形成标准的正弦波。
变频系统控制器采用SPWM 波形TI 公司推出的业界首款浮点数字信号控制器TMS320F28335,它具有 150MHz 高速处理能力,具备 32 位浮点处理单元,单指令周期 32 位累加运算,可满足应用对于更快代码 开发与集成高级控制器的浮点处理器性能的要求。
一、基于LCL 滤波的VSR1. VSR 的控制目标:通过对网侧电流幅值和相位跟踪控制来实现VSR 的功率控制。
2. 采用LCL 滤波的原因:利用相对较小的滤波电感来有效滤除PWM 高频谐波,在大功率场合可以显著减小滤波器的体积、损耗和成本。
但LCL 滤波器具有三阶传递特性,自身存在谐振可能,会影响系统稳定性,因此可以采用多环控制策略来抑制谐波,改善系统稳定性。
3. 控制系统中存在的两个扰动量:电网电压扰动和直流侧电压Udc 扰动。
电网电压波动可以通过前馈手段抑制;直流侧电压的波动可以闭环控制,对于蓄电池供电、直流侧电压不能闭环控制的VSR ,可以通过检测Udc 来解耦补偿到调制波的指令信号Uref 中去。
4. 消除LCL 谐波的方法。
无源阻尼法:在滤波网络中加入电阻来增加系统的阻尼,但引入了附加电阻损耗;有源阻尼法:通过构建一定的控制结构并通过控制算法来有效提高系统的阻尼,实现多环控制。
外环为直流电压环,中环为交流电流环,内环为滤波器中的某一变量环。
二、几种基于LCL 滤波的多环控制 1. 基于LCL 滤波的主电路2.输出电流单环有源逆变控制框图3.基于电容电流Ic 反馈的系统结构框图(忽略R1、R2)由系统结构图可得系统开环传递函数为:()2K 21212K sL CG (s )s L L C L L =++ ;=1*Kpwm由内环根轨迹知,不论K 如何变化,基于Ic 反馈的单位调节器内环控制始终是稳定的。
4.基于电感L2电压Ul2和电容电压Uc 反馈的控制系统结构框图图4-12 L2u 反馈系统内环控制结构框图图4-13 C u 反馈系统内环控制结构框图由图4-12和4-13可见,2L u 和C u 作为反馈变量时的控制结构框图仅是扰动点的作用不同,因而两者具有相同的跟随给定能力,仅是对扰动的抑制能力不同。
因而两者在给定信号作用下的系统性能是等价的,这里仅以L2u 反馈作为研究对象。
由L2u 反馈时的结构图可得内环开环传递函数为:()2K 21212K L G (s )s L L C L L =++由内环根轨迹知,无论K 如何变化,基于Ul2和Uc 反馈的单位调节器内环控制均不稳定。