基于MATLABSimMechanics的捣固镐内筒建模与仿真分析
- 格式:pdf
- 大小:2.86 MB
- 文档页数:3

31铲・装・运本栏目编辑 严 瑾第 41 卷 2013 年第 2 期基于 SimMechanics 的挖掘机工作装置运动仿真分析白鹏伟,史青录,程结结,吴正明,钟 飞太原科技大学机械工程学院 山西太原 030024摘要:为了查找和检验挖掘机工作装置设计方案的问题与缺陷,利用 SimMechanics 工具箱对挖掘机工作装置作业过程进行运动仿真。
通过仿真快速绘制出包络图并验证其工作尺寸参数,使设计人员在设计阶段就可以判断设计方案的合理性。
关键词:SimMechanics;工作装置;包络图;运动仿真中图分类号:TU621 文献标志码:A 文章编号:1001-3954(2013)02-0031-04Simulation and analysis on motion of excavator manipulatorbased on SimMechanicsBAI Pengwei ,SHI Qinglu ,CHENG Jiejie ,WU Zhengming ,ZHONG FeiSchool of Mechnical Engineering, Taiyuan University of Science & Technology, Taiyuan 030024, Shanxi, ChinaAbstract :In order to find out the problems and defects in the design scheme of excavator manipulator,SimMechanics toolbox was used to simulate the motion of the excavator manipulator. After the envelop diagram being plotted rapidly through simulation, the operating parameters were verified. The method could make it possible for designers to judge the reasonableness of design scheme during designing process.Keywords :SimMechanics; manipulator; envelope diagram; motion simulation作者简介:白鹏伟,男,1986 年出生,硕士研究生,主要研究方向为机械与车辆动力学。

matlab中simmechanics的用法在MATLAB中,SimMechanics是一种强大的工具,用于建模、模拟和分析多体机械系统的动力学行为。
SimMechanics能够帮助工程师和科学家们设计和优化复杂的机械系统,从而提高系统的性能和可靠性。
SimMechanics提供了一组功能强大的工具,以便用户能够轻松地建立和修改机械系统模型。
用户可以使用图形界面进行模型设计,也可以使用MATLAB代码进行自动化建模。
SimMechanics利用了Simulink的环境,使用户可以方便地与其他MATLAB工具进行集成,如优化工具箱和控制系统工具箱。
在SimMechanics中,用户可以定义刚体、关节和约束,以构建机械系统的模型。
用户可以选择不同类型的刚体,如圆柱体、方块体,甚至自定义的形状。
关节可以模拟机械系统中的旋转、平移和万向运动。
通过定义合适的约束条件,用户可以模拟机械系统中的限制和连接关系。
SimMechanics还提供了强大的仿真功能,用户可以通过设置初始条件和外部输入来模拟机械系统的动态行为。
仿真结果可以显示在图形界面中,用户可以观察机械系统在不同时间点的运动轨迹和关键参数的变化。
此外,用户还可以导出仿真结果,以便进行后续的数据分析和可视化。
除了仿真功能,SimMechanics还支持参数化建模和优化分析。
用户可以定义系统的参数,并在模型中使用符号表达式进行建模。
这使得用户可以轻松地修改系统参数,从而进行灵敏度分析、优化和参数估计。
SimMechanics可以与MATLAB的优化工具箱集成,提供了丰富的优化算法和工作流程,帮助用户找到最优的设计和控制策略。
总而言之,SimMechanics是MATLAB中用于建模和分析机械系统的强大工具。
它提供了丰富的功能和易于使用的界面,使得工程师和科学家们可以更好地理解和优化机械系统的动力学行为。
无论是对于学术研究还是工程设计,SimMechanics 都是一个不可或缺的工具。


这里我们利用Matlab中的Simulink和SimMechanics做仿真,那么先来看看相关的资料。
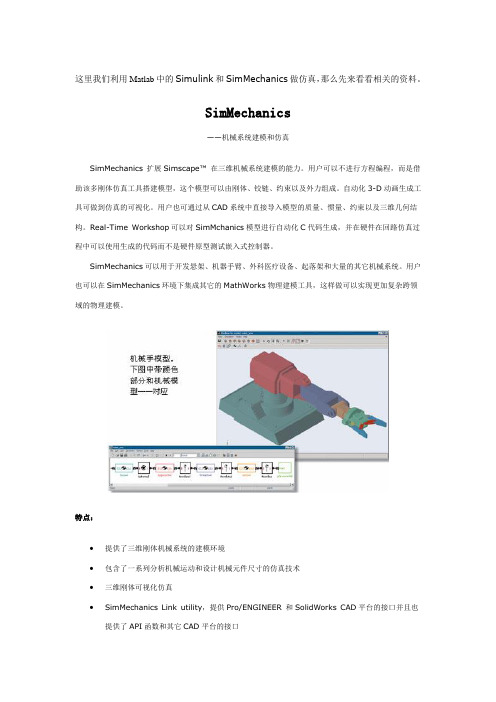
SimMechanics——机械系统建模和仿真SimMechanics 扩展Simscape™ 在三维机械系统建模的能力。
用户可以不进行方程编程,而是借助该多刚体仿真工具搭建模型,这个模型可以由刚体、铰链、约束以及外力组成。
自动化3-D动画生成工具可做到仿真的可视化。
用户也可通过从CAD系统中直接导入模型的质量、惯量、约束以及三维几何结构。
Real-Time Workshop可以对SimMchanics模型进行自动化C代码生成,并在硬件在回路仿真过程中可以使用生成的代码而不是硬件原型测试嵌入式控制器。
SimMechanics可以用于开发悬架、机器手臂、外科医疗设备、起落架和大量的其它机械系统。
用户也可以在SimMechanics环境下集成其它的MathWorks物理建模工具,这样做可以实现更加复杂跨领域的物理建模。
特点:∙提供了三维刚体机械系统的建模环境∙包含了一系列分析机械运动和设计机械元件尺寸的仿真技术∙三维刚体可视化仿真∙SimMechanics Link utility,提供Pro/ENGINEER 和SolidWorks CAD平台的接口并且也提供了API函数和其它CAD平台的接口∙能够把模型转化为C代码(使用Real-Time Workshop)∙由于集成在Simulink环境中,因此可以建立高精度、非线性的模型以支持控制系统的开发和测试。
强大功能:搭建机械系统模型使用SimMechanics用户仅需要收集物理系统信息即可建立三维机械系统模型。
使用刚体、坐标系、铰链和作用力元素定义和其它Simulink模型直接相连的部分。
这个过程可以重用Simulink模型以及扩展了SimMechanics工具的能力。
用户还可把Simulink模型和SimMechnics模型集成为一个模块,并可封装成可在其它模型中复用的子系统。
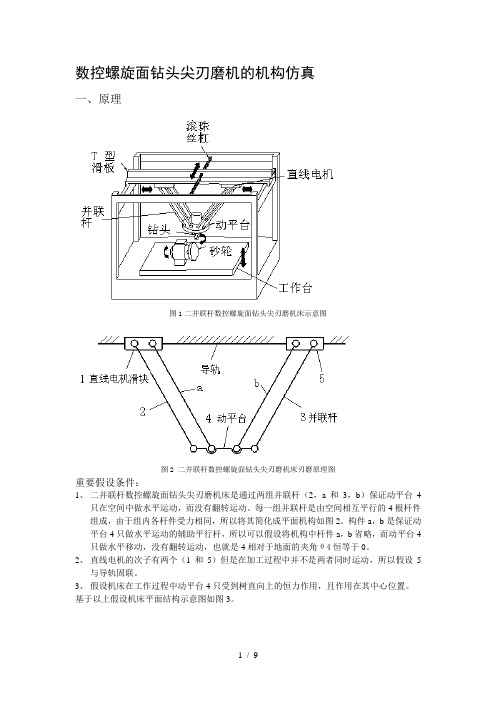
数控螺旋面钻头尖刃磨机的机构仿真一、原理图1二并联杆数控螺旋面钻头尖刃磨机床示意图图2 二并联杆数控螺旋面钻头尖刃磨机床刃磨原理图重要假设条件:1、二并联杆数控螺旋面钻头尖刃磨机床是通过两组并联杆(2,a和3,b)保证动平台4只在空间中做水平运动,而没有翻转运动。
每一组并联杆是由空间相互平行的4根杆件组成,由于组内各杆件受力相同,所以将其简化成平面机构如图2。
构件a,b是保证动平台4只做水平运动的辅助平行杆,所以可以假设将机构中杆件a,b省略,而动平台4只做水平移动,没有翻转运动,也就是4相对于地面的夹角θ4恒等于0。
2、直线电机的次子有两个(1和5)但是在加工过程中并不是两者同时运动,所以假设5与导轨固联。
3、假设机床在工作过程中动平台4只受到树直向上的恒力作用,且作用在其中心位置。
基于以上假设机床平面结构示意图如图3。
图3二并联杆数控螺旋面钻头尖刃磨机床简化机构平面结构示意图二、建立仿真方程C2=cos(θ2) S2=sin(θ2) C3=cos(θ3) S3=sin(θ3)一)力方程(分别对各个杆件进行受力分析) 对动平台4:受力分析如图4图4动平台4的受力分析对并联杆2:受力分析如图5图5并联杆2的受力分析 对直线电机滑块1:受力分析如图6图6直线电机滑块1的受力分析对并联杆3:受力分析如图7图7并联杆3的受力分析 二)闭环矢量运动方程(矢量图如图8)图8 闭环矢量图矢量方程为:R1+R2=R3+R4将上述矢量方程分解为x 和y 方向,并分别对方程两边对时间t 求两次导数得: r1_dot_dot+r2*α2*S2+r2*w2^2*C2=r3*α3*S3+r3*w3^2*C3 (12) r2*α2*C2-r2*w2^2*S2=r3*α3*C3-r3*w3^2*S3 (13) 三)质心加速度的矢量方程矢量关系:Ac3=Rc3_dot_dotAc4=R3_dot_dot+ Rc4_dot_dotAc2=R3_dot_dot+ R4_dot_dot+ Rc2_dot_dot (_dot_dot 表示对时间求两次导数)将上述三个矢量方程分别分解为x 和y 方向,则它们等效为以下六个方程;Ac3x=-rc3*w3^2*C3-rc3*α3*S3 (14) Ac3y=-rc3*w3^2*S3+rc3*α3*C3 (15) Ac4x=-r3*w3^2*C3-r3*α3*S3 (16) Ac4y=-r3*w3^2*S3+r3*α3*C3 (17) Ac2x=-r3*w3^2*C3-r3*α3*S3-rc2*w2^2*C2-rc2*α2*S2 (18) Ac2y=-r3*w3^2*S3+r3*α3*C3-rc2*w2^2*S2+rc2*α2*C2 (19) 力未知量为:F12x,F12y,F24x,F24y,F43x,F43y,F13x,F13y,Fy,Fm 引入的加速度有:α2,α3,r1_dot_dot ,Ac3x ,Ac3y ,Ac4x ,Ac4y ,Ac2x ,Ac2y三、系统方程的组装将所有19个方程组装成矩阵形式101000000000020001010000000000200002222222200000020000000000101000000000000400001010000000000004000101000000000000010000000010010000000100000010000000000000010100000000m m rc S rc C rc S rc C I m m m ⋅⋅-⋅-⋅-----3000000001010000000030000003333000003000000000000000002233100000000000000002233000000000000000002233010000000000000002233001000000000000000330001000000000000m m r C r S I r S r S r C r C rc S r S rc C r C rc S ⋅⋅-⋅-⋅⋅-⋅⋅⋅⋅⋅-⋅0033000010000000000000330000010000000000003300001rc C r S r C ⎛⎫⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪⋅-⎪⋅ ⎪⎪ ⎪⋅-⎝⎭120120240240434301301300020333^2322^2222^2233^2322^222233441F x F y F x F y F x p F y F x F y Fy Fm r w C r w C r w S r w S rc w C Ac x Ac y Ac x Ac y Ac x Ac y r αα∙∙⎛⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪- ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⨯= ⎪ ⎪ ⎪⋅⋅-⋅⋅ ⎪ ⎪⋅⋅-⋅⋅ ⎪-⋅⋅ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭33^2322^2233^2333^2333^2333^2333^23r w S rc w S r w S rc w C rc w S r w C r w S ⎛⎫ ⎪⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪-⋅⋅ ⎪⋅⋅+⋅⋅ ⎪ ⎪-⋅⋅ ⎪ ⎪⋅⋅ ⎪-⋅⋅ ⎪⎪ ⎪⋅⋅⎝⎭ 四、初始条件的设定假设图3位置就是初始位置。
MATLAB中SimMechanics的用法一、SimMechanics简介SimMechanics是MATLAB中的一个工具箱,用于建模、仿真和分析机械系统。
它提供了一种直观的方式来描述和模拟多体动力学系统,包括刚体、关节、连接、传感器等。
二、SimMechanics的安装1.在MATLAB中选择“添加-Ons”菜单。
2.在“获取Add-Ons”对话框中,搜索“SimMechanics”。
3.单击“安装”按钮,等待安装完成。
三、创建机械系统模型1. 添加刚体使用SimMechanics可以创建各种刚体,如盒子、圆柱体等。
可以通过以下步骤添加刚体: 1. 在模型中选择“刚体”工具。
2. 单击模型中的位置以放置刚体。
3. 在属性编辑器中设置刚体的参数,如质量、形状等。
2. 添加关节关节用于连接不同的刚体,并定义它们之间的运动。
可以通过以下步骤添加关节:1. 在模型中选择“关节”工具。
2. 在两个刚体之间单击以放置关节。
3. 在属性编辑器中设置关节的参数,如类型、转动轴等。
3. 添加连接连接用于模拟刚体之间的物理连接,如弹簧、阻尼器等。
可以通过以下步骤添加连接: 1. 在模型中选择“连接”工具。
2. 在两个刚体之间单击以放置连接。
3. 在属性编辑器中设置连接的参数,如刚度、阻尼等。
4. 添加传感器传感器用于测量系统中的物理量,如位置、速度等。
可以通过以下步骤添加传感器:1. 在模型中选择“传感器”工具。
2. 单击模型中的位置以放置传感器。
3. 在属性编辑器中设置传感器的参数,如测量类型、位置等。
四、模型仿真和分析SimMechanics提供了丰富的仿真和分析工具,可以帮助用户对机械系统进行模拟和分析。
1. 仿真参数设置在进行仿真之前,需要设置仿真参数,如仿真时间、步长等。
可以通过以下步骤设置仿真参数: 1. 在模型中选择“仿真参数”工具。
2. 在仿真参数对话框中设置仿真参数。
3. 单击“应用”按钮以保存设置。
matlab中simmechanics的用法SimMechanics是MATLAB中的一个工具箱,用于建模和仿真机械系统。
它提供了一种直观的方式来描述和分析复杂的机械系统,包括刚体、关节、连接器和力学元件等。
首先,SimMechanics提供了一个图形界面,使用户可以轻松地创建机械系统模型。
用户可以通过拖放刚体、关节和连接器等元素来构建系统。
这些元素可以根据需要进行自定义,例如设置质量、惯性矩阵和几何形状等。
SimMechanics还提供了丰富的库,包括各种常见的机械元件,如齿轮、连杆、弹簧等。
用户可以从库中选择适当的元件,并将其添加到模型中。
此外,SimMechanics还支持自定义元件的创建,以满足特定应用需求。
一旦模型构建完成,用户可以使用SimMechanics进行仿真。
SimMechanics使用基于物理原理的求解器来计算系统在不同时间点上的状态。
用户可以设置仿真参数,如时间步长和仿真时间等,并观察系统在仿真过程中的行为。
SimMechanics还提供了丰富的分析工具,用于评估系统性能。
用户可以通过绘制关键变量的曲线图来分析系统的动态响应。
此外,SimMechanics还可以计算系统的能量消耗、力矩和速度等指标,以帮助用户评估系统的效率和稳定性。
SimMechanics还支持与其他MATLAB工具箱的集成,如Simulink和Control System Toolbox等。
用户可以将SimMechanics模型与控制算法相结合,以实现对机械系统的闭环控制。
总之,SimMechanics是MATLAB中一个强大而灵活的工具箱,用于建模和仿真机械系统。
它提供了直观的图形界面、丰富的库和分析工具,使用户能够轻松地创建、仿真和分析复杂的机械系统。
无论是学术研究还是工程应用,SimMechanics都是一个不可或缺的工具。
matlab中simmechanics的用法【原创实用版】目录1.介绍 Matlab 中的 SimMechanics 工具箱2.SimMechanics 的基本用法3.SimMechanics 在机械臂建模与仿真中的应用4.如何深入学习 SimMechanics正文一、介绍 Matlab 中的 SimMechanics 工具箱Matlab 是一款广泛应用于科学计算和工程设计的软件,其内置的SimMechanics 工具箱为机械系统的建模和仿真提供了强大的功能。
SimMechanics 工具箱涵盖了机械系统的各个方面,包括运动学、动力学、控制等,可以帮助用户快速搭建机械系统的模型并进行仿真。
二、SimMechanics 的基本用法对于初学者和小白,可以先从 SimMechanics 的基本用法入手。
SimMechanics 提供了一系列的函数和命令,用于创建和操作机械系统的各个部分。
以下是一些基本用法:1.创建机械系统模型:使用 SimMechanics 中的函数创建机械系统的各个部件,如关节、连杆、电机等。
2.添加约束和力:为机械系统添加约束和力,以便进行动力学分析和控制。
3.求解逆运动学:使用 SimMechanics 中的逆运动学函数求解机械系统的末端执行器的位置和姿态。
4.进行仿真:使用 SimMechanics 中的仿真函数对机械系统进行仿真,以验证其运动性能和响应特性。
三、SimMechanics 在机械臂建模与仿真中的应用SimMechanics 在机械臂建模与仿真中的应用非常广泛。
例如,可以使用 SimMechanics 工具箱对 Adept 机器人进行建模仿真。
首先,需要对机器人的正运动学、逆运动学以及轨迹规划、关节控制等内容有所了解。
然后,可以使用 SimMechanics 中的函数和命令搭建机器人的模型,并进行动力学仿真。
四、如何深入学习 SimMechanics对于想要深入学习 SimMechanics 的用户,可以通过以下途径:1.查阅 Matlab 官方文档:Matlab 官方文档中包含了 SimMechanics 的详细说明和示例,可以帮助用户深入了解 SimMechanics 的各个功能和用法。
基于MatlabSimMechanics的机械结构仿真技术研究随着计算机技术的发展,为了满⾜市场竞争对产品⾼性能的要求,对所设计的产品进⾏动⼒学、运动学等⽅⾯的仿真是很必要的。
通过建⽴仿真软件⽀持的产品模型,从⽽实现机电⼀体化产品⽅案的确定,并可以及时快速的利⽤模型仿真结果分析得到反馈信息,进⽽改进和优化设计⽅案[1]。
Matlab软件利⽤强⼤的科学数值计算能⼒和良好的Simulink⼈机交互图形界⾯仿真环境可以对机械系统进⾏建模仿真以及系统参数优化[2、3]。
特别是SimMechanics⼯具箱的推出,使得机械系统的建模与仿真变得更加简便易⾏。
近年来在机械产品仿真设计⽅⾯采⽤MATLAB/Simulink的⽅法已经成为热点。
⽂[4]中在对⼆级倒⽴摆系统的动⼒学⽅程进⾏建模的基础上,将其转化为线性定常系统的状态控制问题,运⽤LQR控制器在MATLAB平台上实现了该系统的最优控制策略,并给出了相应的实验结果。
⽂[5]中运⽤Simulink的基础模块搭建了连杆机构仿真模型,并对六杆机构进⾏了简单的运动学分析。
⽂[6]在介绍了Simulink仿真模块的基础上,利⽤Simulink基础模块对⼆杆操作⼿进⾏了分析和仿真。
但上述仿真基本是采⽤基础模型的搭建和编程的⽅法实现的,这使得机械产品系统设计⽐较繁琐,⽽SimMechanics⼯具箱的推出,使得机械系统的建模与仿真变得更加简便、直观、易⾏。
本⽂分别以平⾯四杆机构和双摆机构为例介绍了SimMechanics⼯具箱的应⽤和技巧,分析了两种机构的仿真结果。
仿真结果表明:采⽤SimMechanics可以更容易地解决机构系统的仿真问题,使⼯程技术⼈员能更专注于对机械系统的各种运动进⾏分析的应⽤设计,并可以得出直观的动画效果。
1.SimMechanics简介SimMechanics是The Math Work公司于2001年10⽉推出的机构系统模块集(SimMechanics Block-set),它可以对各种运动副连接的刚体进⾏建模与仿真,实现对机构系统进⾏分析与设计的⽬的。