飞行器结构设计第二章新
- 格式:ppt
- 大小:2.37 MB
- 文档页数:35
西工大飞行器结构力学电子教案第一章:飞行器结构力学概述1.1 飞行器结构力学的定义介绍飞行器结构力学的概念和基本原理。
解释飞行器结构力学的研究对象和内容。
1.2 飞行器结构的特点与分类讨论飞行器结构的特点,包括轻质、高强度、耐腐蚀等。
介绍飞行器结构的分类,包括飞行器壳体、梁、板、框等。
1.3 飞行器结构力学的基本假设阐述飞行器结构力学分析的基本假设,如材料均匀性、连续性和稳定性。
第二章:飞行器结构受力分析2.1 飞行器结构受力分析的基本方法介绍飞行器结构受力分析的基本方法,包括静态分析和动态分析。
2.2 飞行器结构受力分析的实例通过具体实例,讲解飞行器结构受力分析的过程和方法。
2.3 飞行器结构受力分析的计算方法介绍飞行器结构受力分析的计算方法,包括解析法和数值法。
第三章:飞行器结构强度分析3.1 飞行器结构强度理论介绍飞行器结构强度理论的基本原理,包括最大应力理论和能量原理。
3.2 飞行器结构强度计算方法讲解飞行器结构强度计算的方法,包括静态强度计算和疲劳强度计算。
3.3 飞行器结构强度分析的实例通过具体实例,展示飞行器结构强度分析的过程和方法。
第四章:飞行器结构稳定分析4.1 飞行器结构稳定理论介绍飞行器结构稳定理论的基本原理,包括弹性稳定理论和塑性稳定理论。
4.2 飞行器结构稳定计算方法讲解飞行器结构稳定计算的方法,包括解析法和数值法。
4.3 飞行器结构稳定分析的实例通过具体实例,讲解飞行器结构稳定分析的过程和方法。
第五章:飞行器结构动力学分析5.1 飞行器结构动力学基本原理介绍飞行器结构动力学的基本原理,包括振动理论和冲击理论。
5.2 飞行器结构动力学计算方法讲解飞行器结构动力学计算的方法,包括解析法和数值法。
5.3 飞行器结构动力学分析的实例通过具体实例,展示飞行器结构动力学分析的过程和方法。
第六章:飞行器结构疲劳与断裂分析6.1 飞行器结构疲劳基本理论介绍飞行器结构疲劳现象的基本原理,包括疲劳循环加载、疲劳裂纹扩展等。
飞行器飞行控制与导航系统设计第一章:引言随着航空技术的飞速发展,飞行器的飞行控制与导航系统的设计变得愈发重要。
飞行控制与导航系统是保障飞行器安全飞行的关键因素之一。
本文将从飞行控制与导航系统的概述入手,深入探讨该系统的设计原理和方法。
第二章:飞行控制系统飞行控制系统主要由飞行控制计算机、执行器、传感器以及作动器等组成。
飞行控制计算机是飞行控制系统的核心,其通过算法和模型来控制飞行器的姿态、航向和高度等。
执行器负责将计算机生成的指令转化为力和力矩,通过作动器作用于飞行器。
传感器则用于采集飞行器的各种状态参数。
飞行控制系统的设计目标是确保飞行器的稳定性、可靠性和安全性。
第三章:导航系统导航系统是指飞行器用于确定其位置、速度和航向等信息的系统。
常见的导航系统包括惯性导航系统(INS)、全球定位系统(GPS)和惯性/全球定位系统(INS/GPS)等。
惯性导航系统通过加速度计和陀螺仪等传感器来测量飞行器的加速度和角速度,进而计算出其位置和航向。
全球定位系统则通过接收地面的卫星信号,来确定飞行器的准确位置和速度。
惯性/全球定位系统是结合了两者优点的一种导航系统。
第四章:飞行控制与导航系统的设计原理飞行控制与导航系统的设计原理主要包括建模、控制算法选择和系统集成等方面。
建模是指将飞行器的动力学和环境模型抽象为数学模型。
控制算法是指根据这些模型,选择合适的控制策略来实现稳定控制和导航。
系统集成则是指将飞行控制系统与导航系统进行有机地集成,确保二者之间的相互作用。
第五章:飞行控制与导航系统的设计方法飞行控制与导航系统的设计方法包括仿真、实验和实际飞行验证等。
仿真是指利用计算机模型来进行系统设计和性能评估。
实验则是通过实际物理设备进行系统验证和优化。
最终需要进行实际飞行验证,以验证系统在真实飞行环境中的性能表现。
第六章:飞行控制与导航系统的发展趋势随着航空技术的不断进步,飞行控制与导航系统也在不断发展。
未来,飞行控制与导航系统将更加智能化和自动化。
西工大飞行器结构力学电子教案第一章:绪论1.1 课程简介1.2 飞行器结构力学的研究对象和内容1.3 飞行器结构力学的应用领域1.4 学习方法和教学要求第二章:飞行器结构的基本受力分析2.1 概述2.2 飞行器结构的受力分析方法2.3 飞行器结构的受力类型及特点2.4 飞行器结构的基本受力分析实例第三章:飞行器结构的弹性稳定性分析3.1 概述3.2 弹性稳定性的判别准则3.3 飞行器结构弹性稳定性分析方法3.4 飞行器结构弹性稳定性分析实例第四章:飞行器结构的强度分析4.1 概述4.2 飞行器结构强度计算方法4.3 飞行器结构材料的力学性能4.4 飞行器结构强度分析实例第五章:飞行器结构的刚度分析5.1 概述5.2 飞行器结构刚度计算方法5.3 飞行器结构刚度分析实例5.4 飞行器结构刚度优化设计第六章:飞行器结构的疲劳分析6.1 概述6.2 疲劳寿命的计算方法6.3 疲劳裂纹扩展规律6.4 飞行器结构疲劳分析实例第七章:飞行器结构的断裂力学分析7.1 概述7.2 断裂力学的基本概念7.3 断裂判据和裂纹扩展规律7.4 飞行器结构断裂力学分析实例第八章:飞行器结构的动力学分析8.1 概述8.2 飞行器结构动力学的基本方程8.3 飞行器结构的动力响应分析8.4 飞行器结构动力学分析实例第九章:飞行器结构复合材料分析9.1 概述9.2 复合材料的力学性能9.3 复合材料结构分析方法9.4 飞行器结构复合材料分析实例第十章:飞行器结构力学工程应用案例分析10.1 概述10.2 飞行器结构力学在飞机设计中的应用10.3 飞行器结构力学在航天器设计中的应用10.4 飞行器结构力学在其他工程领域的应用重点和难点解析重点环节一:飞行器结构的基本受力分析补充和说明:飞行器结构的基本受力分析是理解飞行器结构力学的基础,需要掌握各种受力类型的特点和分析方法,并通过实例加深理解。
重点环节二:飞行器结构的弹性稳定性分析补充和说明:弹性稳定性是飞行器结构设计中的关键问题,需要理解判别准则,掌握分析方法,并通过实例了解实际应用。
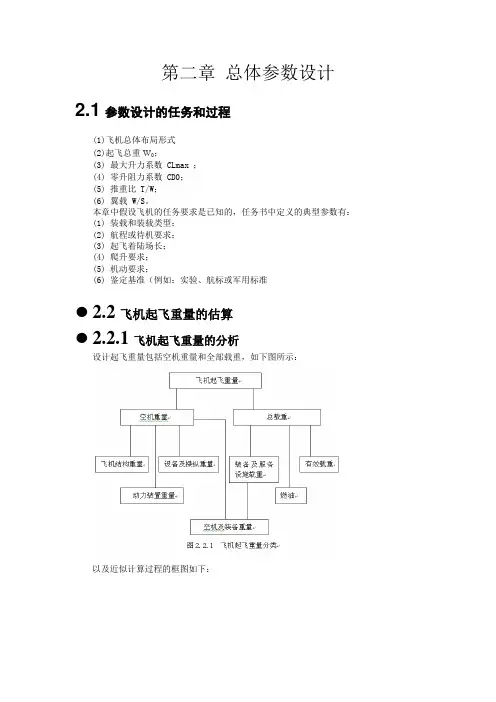
第二章总体参数设计2.1参数设计的任务和过程(1)飞机总体布局形式(2)起飞总重W0;(3) 最大升力系数 CLmax ;(4) 零升阻力系数 CD0;(5) 推重比 T/W;(6) 翼载 W/S。
本章中假设飞机的任务要求是已知的,任务书中定义的典型参数有:(1) 装载和装载类型;(2) 航程或待机要求;(3) 起飞着陆场长;(4) 爬升要求;(5) 机动要求;(6) 鉴定基准(例如:实验、航标或军用标准●2.2飞机起飞重量的估算●2.2.1飞机起飞重量的分析设计起飞重量包括空机重量和全部载重,如下图所示:以及近似计算过程的框图如下:W 0为飞机的起飞总重,它由以下几部分组成:e f p W W W W ++=0)(eq en st f p W W W W W ++++=Wp ——有效载荷(含乘员)重量;Wf ——燃油重量,包括任务燃油(可用燃油)、备份燃油(安全余油)及死油三部分; We ——空机重量,主要包括结构(机体、起落架、操纵系统等)重量、动力装置重量及设备重量三部分; 因为:e f p W W W W ++=00000)/()/(W W W W W W W e f p ++=e f p W W W W ++=0/(00)/W W所以:000//1W W W W W W e f p--=其中:0/w w f、0/w w e 分别称为燃油重量系数、空机重量系数。
在有效载重Wp 已知的情况下,求出空机重量系数0/w w e 和燃油重量系数 0/w w f (或燃油重量f W ),就可求出0W 。
2.2.2各重量系数的预测一、空机重量系数0/w w e的确定起飞重量中,空机重量可以用对应的空机重量系数乘以起飞重量而得到.空机空重:EE O OW W W W =⨯ 空机重量系数:C EO VS OW AW K W = 相对于O W 的经验空机重量系数统计值对于变后掠翼VS K =1.04, 正常机翼VS K =1.00 取 A=0.93, C=-0.07 VSK =1.00空机重量系数0.070.93ETO TOW W W -= 二、燃油重量系数0/w w f 的确定飞行任务中使用燃油重量为 (1)fused ff TO W m W =-任务燃油重量为 (1)F ff TO fres W m W W =-+ 其中 ff m 为任务燃油系数,fres W 为额外燃油重量, 任务燃油系数ff m = 710i i i iW W =+=∏ 这里注意取0W =TO W 典型飞行任务剖面图各任务段重量比的计算: 任务抛面 i i W W /1+发动机启动和暖机0.9900 取自AAA 典型的暖机段燃油系数 滑 跑 0.9950 取自AAA 典型的滑跑段燃油系数 起 飞 0.9950 取自AAA 典型的起飞段燃油系数爬升到巡航高度并加速到巡航速度0.9850 根据经验公式巡 航 0.8185 根据经验公式待 机 0.9323 根据经验公式取m in 30=ltr E施放有效载荷 1.0000待 机 0.9993 式取m in 5=ltr E根据经验公返 航 0.8185 根据经验公式下 降 0.9850 取自AAA 典型的下降段燃油系数 着陆、滑行和关机0.9950取自AAA 典型的着陆/滑行段燃油系数现在开始计算空中中巡航段和待机段的重量比 (1)巡航段54W W发动机耗油率C 发动机类型巡航耗油率待机耗油率2滑跑1发动机启动和暖机起飞4爬升并加速5巡航6待机7下降8着陆滑行并关机本运输机采用双转子,轴流式,高涵道比涡轮风扇发动机V2500这种发动机推力大、耗油率低。

飞行器结构优化与减重设计研究第一章:引言飞行器作为现代航空领域的重要组成部分,在军事、民用、科研等领域广泛应用。
为了满足飞行器的性能要求和减小结构重量,优化与减重设计成为研究的重点。
本文旨在探讨飞行器结构优化与减重设计的研究进展及相关方法。
第二章:飞行器结构优化方法2.1 传统优化方法传统的飞行器结构优化方法主要包括拓扑优化、尺寸优化和形状优化等。
拓扑优化通过调整零件的连接方式和位置,实现结构的降重;尺寸优化通过调整零件的尺寸,实现结构的轻量化;形状优化通过改变零件的外形,实现结构的优化。
这些传统方法在一定程度上能够降低结构重量,但其效果受到设计者经验和主观因素的影响。
2.2 参数化优化方法参数化优化方法是在传统的结构优化方法基础上引入参数化设计的思想,通过建立参数与结构性能之间的关系,实现结构形状的优化。
参数化优化方法能够充分发挥计算机的优势,实现结构优化的自动化和高效率。
同时,参数化优化方法还能够考虑多种约束条件,如受力要求、结构刚度、固有频率等,进一步提高结构的性能。
第三章:飞行器结构减重设计方法3.1 材料选择与替代材料选择与替代是飞行器结构减重设计的重要方法之一。
通过选择性能更好的材料或替代部分结构材料,可以实现结构重量的减轻。
具体而言,可以使用高强度、低密度的材料来替代重量较大的材料,如使用碳纤维复合材料替代传统金属材料。
3.2 结构拓扑优化结构拓扑优化是一种基于材料分布的结构减重设计方法。
通过改变结构的材料分布,优化结构的拓扑形态,达到减轻结构重量的目的。
结构拓扑优化方法能够充分利用材料的性能,将材料只放置在需要的位置,减少浪费和冗余,从而实现结构的最优设计。
3.3 结构形状优化结构形状优化是一种基于形状变量的结构减重设计方法。
通过改变零件的外形,优化结构的受力分布和应力分布,从而实现对结构重量的减轻。
结构形状优化方法能够充分发挥材料的性能,改善结构的应力状态,提高结构的承载能力,实现结构重量的减轻。
电动飞行器的设计与性能优化研究第一章:引言近年来,随着电力技术和无人机技术的迅猛发展,电动飞行器正逐渐成为人们关注的热点。
电动飞行器具备环境友好、低噪音、高效能等诸多优势,其在军事、民用、科研等领域的应用前景广阔。
本文旨在通过对电动飞行器的设计与性能优化研究,提供更好的理论基础和实践指导,推动电动飞行器技术的发展与应用。
第二章:电动飞行器的设计原理2.1 电动飞行器的结构组成电动飞行器主要由机身、翼面、传动系统和动力系统等组成。
机身是承载机翼、尾翼和其他航空设备的实体结构,其中,机身的材料和设计对电动飞行器的性能具有重要影响。
2.2 电动飞行器的飞行原理电动飞行器的飞行原理与常规飞行器类似,主要依靠动力推进和气动力来实现飞行。
电动飞行器通过电动机驱动螺旋桨进行推进,同时利用机翼的升力和尾翼的稳定控制来实现飞行。
第三章:电动飞行器的性能需求与优化3.1 性能需求分析电动飞行器的性能需求既包括飞行性能,也包括操纵性能和运载性能等。
飞行性能包括速度、升限、续航力等指标,操纵性能包括机动性、控制能力等指标,运载性能包括载荷能力、运输效率等指标。
3.2 性能优化方法为了满足不同应用场景下的性能需求,电动飞行器的设计需要进行性能优化。
性能优化可以通过改进材料、改进结构和优化动力系统等方法来实现。
同时,优化飞行轨迹、改进导航系统等也是提高电动飞行器性能的关键因素。
第四章:电动飞行器的设计与优化案例4.1 优化材料及结构设计案例通过改进材料的强度和轻量化设计,可以减轻电动飞行器的自重,提高其载荷能力和续航力。
同时,合理的结构设计可以提高电动飞行器的稳定性和操纵性能,减小空气阻力。
4.2 优化动力系统设计案例电动飞行器的动力系统是其核心部件,直接影响飞行器的推力和效率。
通过改进电动机的功率、转速和效率等参数,可以提高电动飞行器的性能。
此外,采用先进的电池技术和能源管理系统,可以有效延长电动飞行器的续航能力。
4.3 优化飞行轨迹与导航系统设计案例电动飞行器的飞行路径和导航系统对其飞行效能也具有重要影响。
未来飞行器的设计与制造第一章:引言随着科技的不断进步和人们对于探索未知的渴望,飞行器在人类的生活中扮演着越来越重要的角色。
从最初的热气球到现在的喷气式飞机,飞行器的设计与制造经历了长足的发展。
然而,随着科技的飞速发展,未来飞行器的设计与制造面临着更多的挑战和机遇。
本章将介绍未来飞行器设计与制造的背景和意义。
第二章:未来飞行器的设计需求未来飞行器的设计需求与当前的飞行器有着很大的不同。
首先,随着人类对太空的探索不断深入,未来的飞行器需要具备在太空环境下进行长时间任务的能力。
其次,随着人类对环境保护的重视,未来的飞行器需要具备更高的能源效率和更低的排放水平。
再次,随着城市化进程的不断加速,未来的飞行器需要具备垂直起降、低空飞行等特性,以适应城市交通的需求。
第三章:未来飞行器的设计原则未来飞行器的设计原则包括安全性、可靠性、高效性和可持续性。
安全性是未来飞行器设计的首要原则,飞行器应具备完善的飞行控制系统和紧急救援功能,以确保乘客和货物的安全。
可靠性是指飞行器在长期使用过程中保持技术状态的能力,飞行器的设计应考虑到材料的耐久性、机械结构的强度等因素。
高效性是指飞行器在任务执行中能够最大化利用能源和资源,降低运营成本。
可持续性是指飞行器的设计应考虑环境保护和资源利用的问题,减少对环境的负面影响。
第四章:未来飞行器的制造技术未来飞行器的制造技术需要满足设计需求和设计原则,以保证飞行器的性能和质量。
首先,新材料的应用是未来飞行器制造技术的关键。
新材料具有更高的强度、更轻的质量和更好的耐久性,可以提升飞行器的性能和可靠性。
其次,先进的制造技术如3D打印、纳米技术等也将在未来飞行器的制造中发挥重要作用。
这些技术可以实现零部件的精密制造和定制化生产,提高生产效率和产品质量。
第五章:未来飞行器的设计案例为了更好地说明未来飞行器的设计与制造,本章将介绍一些现有的未来飞行器设计案例。
例如,融合了太阳能充电技术的无人机,使其在太空环境下能够长时间执行任务;具备可变机翼设计的客机,可以根据航线和飞行阶段的需求调整机翼形状,实现更高的飞行效率;具备垂直起降功能的城市飞行器,可以解决城市交通拥堵的问题。
第二章 习题答案2.飞机由垂直俯冲状态退出,沿半径为r 的圆弧进入水平飞行。
若开始退出俯冲的高度H 1=2000 m ,开始转入水平飞行的高度H 2=1000 m ,此时飞行速度v =720 km/h ,(题图2.3),求(1)飞机在2点转入水平飞行时的载荷系数n y ;(2) 如果最大允许载荷系数为n ymax =8,则为保证攻击的突然性,可采用何种量级的大速度或大机动飞行状态?(即若r 不变,V max 可达多少? 如果V 不变,r min 可为多大?解答(1) 08.5)(8.9)36001000720(112122=-⨯⨯+=+==H H gr v G Y n y (2) h km r g n v y /2.94310008.9)18(.).1(max =⨯⨯-=-=m n g v r y 1.583)18(8.9)36001000720()1(22min-⨯⨯=-= 3.某飞机的战术、技术要求中规定:该机应能在高度H =1000m 处,以速度V=520 Km/h 和V ’=625km /h(加力状态)作盘旋半径不小于R =690m 和R ‘=680m(加力 状态)的正规盘旋(题图2.4)。
求(1) 该机的最大盘旋角和盘旋过载系数n y ;(2) 此时机身下方全机重心处挂有炸弹,重G b =300kg ,求此时作用在炸弹钩上的载荷大小及方向(1kgf =9.8N)。
解答: (1)βcos 1==G Y n y ∑=01X rv m Y 2sin =β ①∑=01Y G Y =βcos ②由①与②得085.36908.9)36001000520(22=⨯⨯==grv tg β 04.72=β (非加力) 523.46808.9)36001000625(2=⨯⨯=βtg 5.77=β (加力) 6.4cos 1==βy n (2)F = G b *n y = 300*9.8*4.6 = 13.5KN (Y 正向)6.飞机处于俯冲状态,当它降到H =2000m 时(H ρ=0.103kg /m 3。
飞行器设计与制造技术第一章概述飞行器是指能够在地球大气层以外空间飞行并被人类控制的物体,它可以是航空器(如飞机、直升机),也可以是宇航器(如火箭、卫星)。
飞行器设计与制造技术是指通过物理学、力学、材料科学等基础学科,将各种科技成果应用于飞行器的设计与制造过程中,以获得技术先进、性能安全的飞行器。
第二章飞行器设计技术2.1 飞行器设计目标飞行器设计的目标是通过科学合理的设计,使得飞行器在使用过程中能够达到预期的性能、效率、安全和舒适性。
设计目标的制定需要考虑受力性能、气动性能、耐久性能等多个方面因素。
2.2 飞行器结构设计在飞行器的结构设计中,需要考虑结构材料的稳定性、强度、刚度、重量等因素。
同时还需要考虑飞行器的结构布局、外形设计、机体翼展、机翼形状和气动布局等因素。
2.3 飞行器动力系统设计在飞行器的动力系统设计中,需要考虑机体的动力性能、燃料类型和消耗量、动力传动方式、发动机冷却和废气排放、动力控制系统等方面因素。
2.4 飞行器控制系统设计在飞行器的控制系统设计中,需要考虑机体的稳定性、操纵性、飞行姿态控制、机体动态控制等方面因素。
此外,还需要考虑航空电子设备的选择和布局。
第三章飞行器制造技术3.1 飞行器制造工艺飞行器制造工艺包括底坑制造、锻造、铸造、成型、焊接、切削、粘合等多个工序。
此外,还需要保证材料的质量和加工精度。
3.2 飞行器材料飞行器的材料需要具有优良的耐高温、抗压和抗疲劳性能。
常用材料有金属材料、复合材料和增强型塑料等。
3.3 飞行器装配工程飞行器的装配工程是将各个部件组合成整机,并进行性能测试和试飞的过程。
装配过程需要遵循严格的工艺要求和质量标准。
第四章飞行器安全性控制技术4.1 飞行器安全性设计飞行器的安全性设计包括设计过程中提前发现和解决可能出现的安全隐患,设计合理的应对措施,从根本上保证飞行器的安全性。
4.2 飞行器安全性控制在飞行器的使用过程中,需要通过各种手段对飞行器的安全性进行控制,例如安全保障系统、飞行员培训等。