第四章远动监控系统数据传输与通信网络结构2远动监控
- 格式:ppt
- 大小:2.46 MB
- 文档页数:67
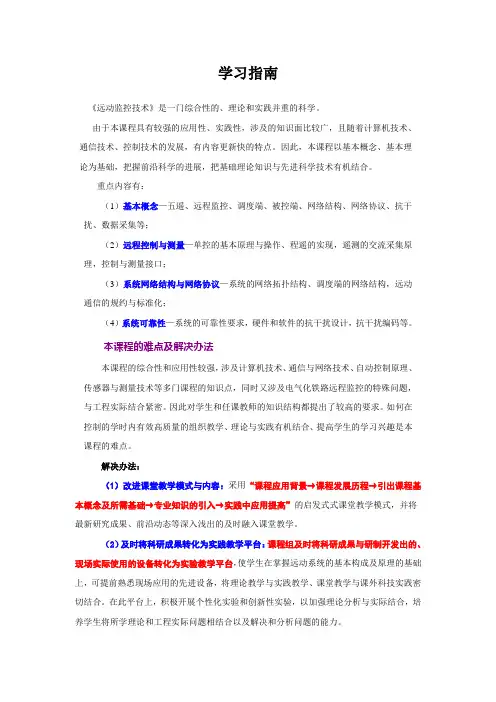
学习指南《远动监控技术》是一门综合性的、理论和实践并重的科学。
由于本课程具有较强的应用性、实践性,涉及的知识面比较广,且随着计算机技术、通信技术、控制技术的发展,有内容更新快的特点。
因此,本课程以基本概念、基本理论为基础,把握前沿科学的进展,把基础理论知识与先进科学技术有机结合。
重点内容有:(1)基本概念—五遥、远程监控、调度端、被控端、网络结构、网络协议、抗干扰、数据采集等;(2)远程控制与测量—单控的基本原理与操作、程遥的实现,遥测的交流采集原理,控制与测量接口;(3)系统网络结构与网络协议—系统的网络拓扑结构、调度端的网络结构,远动通信的规约与标准化;(4)系统可靠性—系统的可靠性要求,硬件和软件的抗干扰设计,抗干扰编码等。
本课程的难点及解决办法本课程的综合性和应用性较强,涉及计算机技术、通信与网络技术、自动控制原理、传感器与测量技术等多门课程的知识点,同时又涉及电气化铁路远程监控的特殊问题,与工程实际结合紧密。
因此对学生和任课教师的知识结构都提出了较高的要求。
如何在控制的学时内有效高质量的组织教学、理论与实践有机结合、提高学生的学习兴趣是本课程的难点。
解决办法:(1)改进课堂教学模式与内容:采用“课程应用背景→课程发展历程→引出课程基本概念及所需基础→专业知识的引入→实践中应用提高”的启发式式课堂教学模式,并将最新研究成果、前沿动态等深入浅出的及时融入课堂教学。
(2)及时将科研成果转化为实践教学平台:课程组及时将科研成果与研制开发出的、现场实际使用的设备转化为实验教学平台,使学生在掌握远动系统的基本构成及原理的基础上,可提前熟悉现场应用的先进设备,将理论教学与实践教学、课堂教学与课外科技实践密切结合。
在此平台上,积极开展个性化实验和创新性实验,以加强理论分析与实际结合,培养学生将所学理论和工程实际问题相结合以及解决和分析问题的能力。
(3)引入新教学手段:充分利用多媒体课件等现代化教学手段、灵活多样的教学方法,加深学生对远动监控系统的整体结构、基本原理、远程控制、远程测量和组态方法带来的控制效果的理解,提高学生的学习兴趣。
教学环节与时间分配一(2分钟)二(8分钟)三(70钟)授课内容组织教学填写教学日志,记学生考勤复习旧课讲授新课第二节远动系统的构成一、远动系统的基本结构在牵引供电系统中,远动功能是综合自动化系统功能的一部分,它是通过变电所与电力调度端(监控中心)之间的远方数据通信来实现的。
从远动系统的空间构成上看,它是由电力调度端、被控端(也称为执行端或远方终端)和信息通道(也称为信道)三部分构成,如图4 -1所示计算机远动系统又称远方监控与数据采集系统,简称SCDAS这种系在调度端配置监控机,由它监控所选定的远方被控终端装置RTU.教学形式、方法与手段调度端主要完成遥控、遥调命令的发送和遥测、遥信、遥视信息的接收、执行和输出等功能。
被控端主要完成遥控、遥调命令的接收、输出执行和遥测、遥信、遥视信息的数据采集和发送等功能。
采用综合自动化系统的被控端,各保护测控单元可通过通信管理单元及网络设备同远动系统实现连接。
二、微机远动系统的调度端(一)调度端的功能微机远动系统除具有常规的远动功能外,还具备数据处理、人机联系和当地巡网检测等功能。
在数据处理功能方面,可实现遥信优先、事故顺序记录、遥测标度变换、越限判断、数字量总加、数据精度校核、信息转发码型格式变换、信道误字率统计等。
调度端的具体功能有:(1)收集各RTU发送来的数据,如数字量、状态量、脉冲量等,并在CRT上显示有关数据。
(2)对RTU送来的数据进行处理。
如有功电度、无功电度、电能等的总加;模拟量输出记录,如电压曲线、负荷曲线及其越限告警等.(3)实现开关设备的控制与运行量的调节。
形成命令并下发命令到RTU,实现遥控操作断路器、系统接地故障查找、开关事故变位、事故画面优先显示、光声告警事件顺序记录、调节功率因数等。
(4)实现人机联系。
在调度端收集与处理RTU 上送的数据,实时显示数据、变电所主接线图、负荷曲线,修改实时数据库、图形报表,发送遥控、遥测校对命令等,另外,还完成制表打印,负荷、电能、日月运行报表打印,召唤打印,操作报表打印,异常及事故打印等功能.(二)调度端的硬件结构调度端远动设备采用单机或多机作为主机,另配上大屏幕彩色显示器、打印机、鼠标或光笔等外部没备。
一、实验目的1. 理解远动监控系统的基本原理和组成。
2. 掌握远动监控系统的主要功能及操作方法。
3. 熟悉远动监控系统在实际应用中的数据采集、处理和分析方法。
4. 培养实验操作能力和分析问题、解决问题的能力。
二、实验原理远动监控系统是一种远程监控和管理的系统,主要用于电力、通信、交通等领域的设备运行状态监控。
其基本原理是利用通信网络,将分散的监控点连接起来,实现对远程设备的实时监控、故障诊断、数据处理等功能。
三、实验仪器与设备1. 远动监控系统实验平台2. 通信设备(如光缆、光纤收发器等)3. 计算机终端4. 相关软件(如监控软件、数据采集软件等)四、实验步骤1. 系统搭建(1)搭建远动监控系统实验平台,包括通信网络、监控设备、服务器等。
(2)配置通信网络,确保监控点与服务器之间的通信正常。
(3)安装并配置监控软件,实现对监控点的实时监控。
2. 数据采集(1)通过监控软件,对监控点进行数据采集,包括设备状态、运行参数、环境参数等。
(2)对采集到的数据进行初步处理,如滤波、去噪等。
3. 数据处理与分析(1)利用数据分析软件,对采集到的数据进行处理和分析。
(2)分析设备运行状态、故障原因等,为设备维护和故障处理提供依据。
4. 故障诊断与处理(1)根据数据分析结果,对设备故障进行诊断。
(2)根据故障原因,制定故障处理方案。
5. 实验总结(1)总结实验过程中遇到的问题及解决方法。
(2)对实验结果进行分析和评价。
五、实验结果与分析1. 数据采集实验过程中,成功采集到监控点的设备状态、运行参数、环境参数等数据。
数据采集过程稳定,通信网络运行正常。
2. 数据处理与分析通过对采集到的数据进行处理和分析,发现设备运行状态良好,未发现明显故障。
3. 故障诊断与处理实验过程中,未出现设备故障,因此未进行故障诊断与处理。
六、实验结论1. 远动监控系统在实际应用中具有较好的实时性和可靠性。
2. 通过数据采集、处理和分析,可以有效实现对设备的远程监控和故障诊断。
物控系统中的网络架构与通信技术物控系统是指物理控制系统,它是一种通过网络技术连接和控制各种物理设备的系统。
在现代工业和生产环境中,物控系统起着至关重要的作用。
它使得各种设备能够相互通信和协同工作,提高工作效率,并且确保生产过程的安全性和稳定性。
物控系统中的网络架构和通信技术是构建一个可靠和高效系统的关键要素。
网络架构是物控系统中的基础,它决定了系统的稳定性和可扩展性。
一个典型的物控系统包含多个节点和传感器,这些节点和传感器通过网络连接到一个中央控制单元。
网络架构可以分为三层:边缘层,核心层和应用层。
边缘层包含传感器和执行器等物理设备,核心层用于数据的传输和处理,应用层用于监控和控制。
这种分层的结构使得系统能够更好地适应不同规模和复杂度的需求。
在物控系统中,通信技术起着至关重要的作用。
它负责节点和传感器之间的数据传输和交流。
一个可靠的通信技术应具备以下几个特点:高速性,低延迟,低成本,大容量和安全性。
根据不同的应用场景,物控系统可以采用有线和无线通信技术。
有线通信技术是物控系统中常用的一种技术。
它通过有线电缆将数据信号从一个节点传输到另一个节点。
有线通信技术可以提供高带宽和稳定的传输,适用于大规模和复杂的物控系统。
常见的有线通信技术包括以太网、CAN总线和RS485。
以太网是一种标准化的通信协议,它被广泛应用于工业现场和办公环境。
CAN总线是一种低成本和可靠性很高的通信技术,广泛应用于汽车和工业领域。
RS485是一种串行通信协议,可以实现长距离传输。
无线通信技术是物控系统中的另一种重要技术。
它通过无线信号的传输实现节点和传感器之间的通信。
无线通信技术具有灵活性和便捷性的特点,适用于较小规模和移动化的物控系统。
常见的无线通信技术包括Wi-Fi、蓝牙和Zigbee。
Wi-Fi是一种广泛应用于家庭和商业环境的无线通信技术,具有较高的速度和大容量。
蓝牙是一种短距离通信技术,适用于低功耗的设备之间的通信。
Zigbee是一种低速和低功耗的无线通信技术,广泛应用于物联网领域。

第四章远动信息传输与通信设备第一节概述第二节通信信道及数据传输系统第三节调制方式第四节通信设备关键部件4.1概述监控系统的信息传输,是靠通信设备来实现的。
通信设备是远动系统最重要的组成部分之一。
远动系统动作的精确度和可靠度,在很大程度上取决于信道质量的好坏。
YK、频分信道(FDM)和时分信道(TDM)n按信道的复用方式n频分信道(FDM):利用频率变换和调制方法,将若干路信号调制到频谱的不同位置,接收端利用接收滤波器把各路信号区分开。
按频带划分信道构成多路复用。
n时分信道(TDM):将信号时区划分为若干时隙,轮流传输不同的信号,形成时分通信。
模拟信道和数字信道n按传输信号的类型Ø模拟信道:传输连续的模拟信号。
Ø数字信道:传输离散的数字信号。
数字基带传输与频带传输n把原始数据信号(包含直流分量、低频、谐波分量)称为基带信号。
由数据终端产生的二进制数字信号,包括PCM、△M等调制后的信号,称为数字基带信号。
直接利用基带信号进行传输的方式称为基带传输。
如数字光纤通信系统。
n利用载波对基带信号进行调制,使信号频谱搬移到载波频率附近的一个频带内,把这种调制后的信号称频带信号。
用频带信号进行数据传输称频带传输。
n近距(几米到几百米):经接口电路(RS-232、RS-422)直接在线路上传输。
n较近:加基带传输机(基带MODEM)。
n较远:采用频带传输,即加调制解调器。
双极性不归零码基带数传机原理框图干扰电平和允许电平远动装置接收灵敏度取决于噪音电平的信杂比(输入信号与噪音功率之比)的数值。
(1)电平的概念在信息传输系统中,除了用衰耗(奈培数或分贝数)来表示信号传输效率外,还经常用电平来表示信号在传输过程中各部位信号幅度的变化情况。
电平可分为相对电平和绝对电平两种,而在相对电平和绝对电平中,又可分为功率电平、电压电平和电流电平。
相对电平:如果选择电路上某一点的功率作为基准,而把电路上各点功率高于或低于基准点功率的倍数以dB(分贝)表示(原来习惯上也用奈培Np表示),这种表示法称为该点的相对电平。
附件二:本科课程教学大纲课程名称:远动监控技术Remote Supervisory and Control Technology课程学科类别:工学电气工程及其自动化学时与学分:48/3先修课程:电路分析、电子技术、微型计算机原理、电气工程概论或牵引供电系统课程教学目标:应掌握电力系统和电气化铁道牵引供电系统远动监控技术的基本概念,了解远程通信的基本原理,能够理解并掌握基于微型计算机的远动监控技术的主要原理和构成,为今后从事监控系统的设计和运行维护等工作打下基础。
适用学科专业:电气工程及其自动化专业教学手段与方法:面授与实验相结合基本教学内容与学时安排●第一章绪论(3学时)第一节概论第二节监控系统的结构及分类第三节远动系统的结构及分类第四节远动信息与传输模式第五节远动监控系统的基本功能第六节电气化铁道远动系统的特点第七节远动系统的性能指标第一节远动调度端硬件结构第二节远动调度端功能第三节远动调度端软件结构第四节调度管理自动化系统●第三章远动监控执行端(6学时)第一节远动执行端的功能第二节远动执行端的硬件结构第三节遥信、遥控、遥测与遥调接口与实现第四节远动执行端的软件结构●第四章远动监控系统数据传输与通信网络结构(6学时)第一节概述第二节通信信道及数据传输系统第三节调制与解调第四节计算机网络基础第五节数据通信方式第六节调度端及RTU的网络结构●第五章远动通讯规约(6学时)第一节概述第二节变电所内部通信规约第三节CDT远动规约第四节IEC60870-5-101远动规约第一节常用的可靠性指标第二节监控系统冗余结构设计第三节硬件可靠性设计第四节软件的可靠性第五节接地技术第六节抗干扰编码●第七章远动监控技术的发展(3学时)第一节概述第二节综合调度系统第三节变电所自动化系统第四节其它●远动监控系统调度端实践教学(3学时)●远动监控系统执行端实践教学(3学时)●习题与复习课(3学时)●机动课(3学时)教材及参考书钱清泉,《电气化铁道微机监控技术》,中国铁道出版社,2001年(教材)盛寿麟,《电力系统远程监控原理》(第2版),中国电力出版社,1998年第2版柳永智,刘晓川,《电力系统远动》,中国电力出版社,2003.1张永健,《电网监控与调度自动化》,中国电力出版社,2004.6考核方式书面考试、作业+实践表现撰稿人:审核:。