过程控制第5章被控对象数学模型
- 格式:ppt
- 大小:1.46 MB
- 文档页数:65
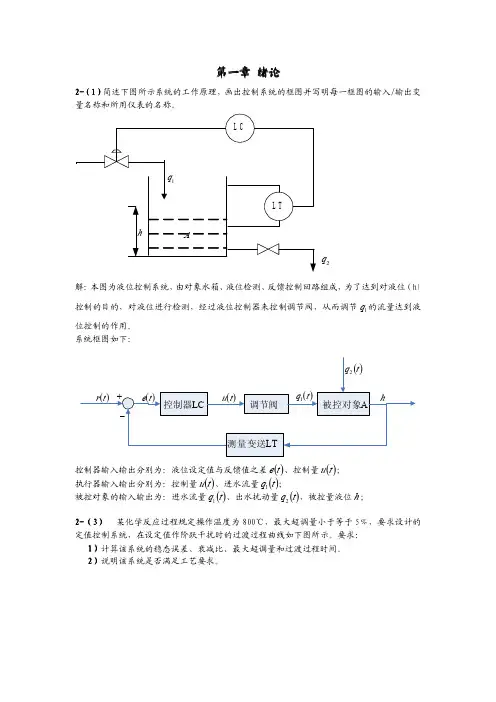
被控对象的数学模型一、填空题(本大题共1小题,总计1分)1.滞后时间又叫时滞,它是从输入产生变化的瞬间起,到它所引起的输出量开始变化的瞬间为止的___生变化的瞬间起,到它所引起的输出量开始变化的瞬间为止的___二、选择题(本大题共31小题,总计62分)1.当对象受到阶跃输入作用后,被控变量如果保持初始速度变化,达到新的稳态之所需的时间称为()。
(A)时间常数 (B)滞后时间(C)振荡周期 (D)过渡时间2.被控对象可以存放物料量或能量的能力称为对象的()。
(A)负荷 (B)容量 (C)时间常数 (D)惯性3.被控对象在受到输入作用后,被控变量不能立即而迅速的变化,这种现象称为()。
(A)滞后现象 (B)滞后时间 (C)容量滞后 (D)传递滞后4.被控对象的传递滞后 ,输出变量的变化落后于输入变量变化的时间称为()。
(A)滞后时间 (B)传递滞后 (C)滞后现象 (D)过渡滞后5.被控对象的传递滞后也称为()。
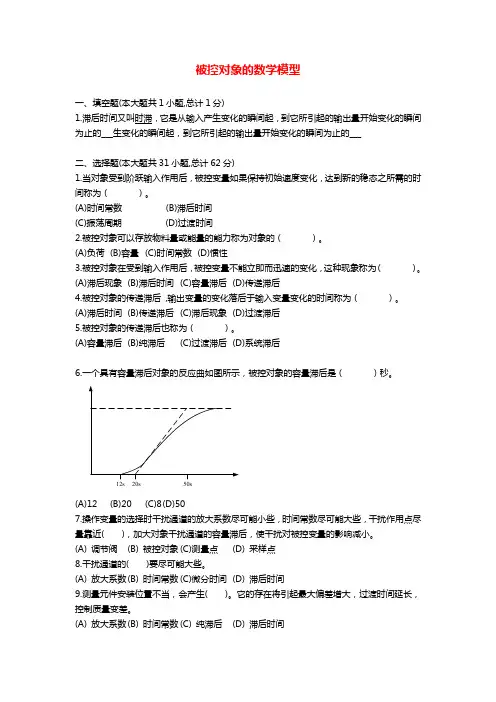
(A)容量滞后 (B)纯滞后(C)过渡滞后 (D)系统滞后6.一个具有容量滞后对象的反应曲如图所示,被控对象的容量滞后是()秒。
12s20s50s(A)12 (B)20 (C)8 (D)507.操作变量的选择时干扰通道的放大系数尽可能小些,时间常数尽可能大些,干扰作用点尽量靠近( ),加大对象干扰通道的容量滞后,使干扰对被控变量的影响减小。
(A) 调节阀(B) 被控对象(C)测量点(D) 采样点8.干扰通道的( )要尽可能大些。
(A) 放大系数(B) 时间常数(C)微分时间 (D) 滞后时间9.测量元件安装位置不当,会产生( )。
它的存在将引起最大偏差增大,过渡时间延长,控制质量变差。
(A) 放大系数(B) 时间常数(C) 纯滞后(D) 滞后时间10.测量元件安装位置不当,会产生纯滞后。
它的存在将引起最大偏差( ),过渡时间延长,控制质量变差。
(A) 减少(B) 增大(C)变化 (D) 不一定11.减少由于测量变送单元引起的纯滞后,可以选取惰性小的测量元件,减小时间常数。
过程控制复习重点热点偶:当两种不同的导体或半导体连接时,若两个接点温度不同,回路中会出现热电动势,并产生电流;通常将一端温度T0维持恒定,称为冷端或自由端。
另外一端放在需要测温的地方,称为热端或工作端。
温度补偿:只有当热电偶冷端温度保持不变时,热电势才是被测温度的单值函数;热电偶的冷端温度补偿:只有将冷端温度保持为0℃,或者进行一定的修正才能得到准确的测量结果。
热电阻:在中、低温区,热电偶输出的热电动势很小;而在中、低温区,用热电阻比用热电偶做为测温元件时的测量精确度更高;热电阻特点:性能稳定、测量精度高,一般可在-270~900℃范围内使用(推荐在150℃以下时选用)。
1习题1-1试述热电偶的测温原理,工业上常用的测温热电偶有哪几种什么热电偶的分度号在什么情况下要使用补偿导线答:a.当两种不同的导体或半导体连接成闭合回路时,若两个接点温度不同,回路中就会出现热电动势,并产生电流.b.铂极其合金,镍铬-镍硅,镍铬-康铜,铜-康铜.c.分度号是用来反应温度传感器在测量温度范围内温度变化为传感器电压或电阻值变化的标准数列.d.在电路中引入一个随冷端温度变化的附加电动势时,自动补偿冷端温度变化,以保证测量精度,为了节约,作为热偶丝在低温区的替代品.1-2热电阻测温有什么特点为什么热电阻要用三线接法答:a.在-200到+500摄氏度范围内精度高,性能稳定可靠,不需要冷端温度补偿,测温范围比热电偶低,存在非线性.b. 在使用平衡电桥对热电阻进行测量时,由电阻引出三根导线,一根的电阻与电源E相连接,不影响电桥的平衡,另外两根接到电桥的两臂内,他们随环境温度的变化可以相互抵消.(在中、低温区,热电偶输出的热电动势很小;而在中、低温区,用热电阻比用热电偶做为测温元件时的测量精确度更高;热电阻特点:性能稳定、测量精度高,一般可在-270~900℃范围内使用(推荐在150℃以下时选用)。
)1-3说明热电偶温度变送器的基本结构.工作原理以及实现冷端温度补偿的方法.在什么情况下要做零点迁移答:a.结构:其核心是一个直流低电平电压-电流变换器,大体上都可分为输入电路.放大电路及反馈电路三部分.b.工作原理:应用温度传感器进行温度检测其温度传感器通常为热电阻,热敏电阻集成温度传感器.半导体温度传感器等,然后通过转换电路将温度传感器的信号转换为变准电流信号或标准电压信号.c.由铜丝绕制的电阻Rcu安装在热电偶的冷端接线处,当冷端温度变化时,利用铜丝电阻随温度变化的特性,向热电偶补充一个有冷端温度决定的电动势作为补偿.桥路左臂由稳压电压电源Vz(约5v)和高电阻R1(约10K欧)建立的恒值电流I2流过铜电阻Rcu,在Rcu上产生一个电压,此电压与热电动势Et串联相接.当温度补偿升高时,热电动势Et下降,但由于Rcu增值,在Rcu两端的电压增加,只要铜电阻的大小选择适当,便可得到满意的补偿.d.当变送器输出信号Ymin下限值(即标准统一信号下限值)与测量范围的下限值不相对应时要进行零点迁移.1-4什扰共模干扰为什么会影响自动化仪表的正常工作怎样才能抑制其影响么叫共模干扰和差模干扰为什么工业现场常会出现很强的共模干答:共模干扰:电热丝上的工频交流电便会向热电偶泄漏,使热电偶上出现几伏或几十伏的对地干扰电压,这种在两根信号线上共同存在的对地干扰电压称为~.差模干扰:在两根信号线之间更经常地存在电磁感应、静电耦合以及电阻泄漏引起的差模干扰.工业上会出现共模干扰是因为现场有动力电缆,形成强大的磁场.造成信号的不稳.共模干扰是同时叠加在两条被测信号线上的外界干扰信号,是被测信号的地和数字电压表的地之间不等电位,由两个地之间的电势即共模干扰源产生的.在现场中,被测信号与测量仪器间相距很远.这两个地之间的电位差会达到几十伏甚至上百伏,对测量干扰很大使仪表不能正常工作有时会损坏仪表.共模干扰在导线与地(机壳)之间传输,属于非对称性干扰,共模干扰幅度大.频率高.还可以通过导线产生辐射,所造成的干扰较大.消除共模干扰的方法包括:(1)采用屏蔽双绞线并有效接地(2)强电场的地方还要考虑采用镀锌管屏蔽(3)布线时远离高压线,更不能将高压电源线和信号线捆在一起走线(4)不要和电控锁共用同一个电源(5)采用线性稳压电源或高品质的开关电源(纹波干扰小于50mV).2.1 什么是调节器的调节规律?PID 调节器的数学表达式是怎样的?比例、积分、微分三种调节规律有何特征?为什么工程上不用数学上理想的微分算式?规律:确定调节器的动态特性称为调节器的调节规律,是调节器的输入信号与输出信号之间的动态关系。
第五章被控过程的数学模型第5章思考题与习题5-1 什么是被控过程的数学模型?解答:被控过程的数学模型是描述被控过程在输⼊(控制输⼊与扰动输⼊)作⽤下,其状态和输出(被控参数)变化的数学表达式。
5-2 建⽴被控过程数学模型的⽬的是什么?过程控制对数学模型有什么要求?解答:1)⽬的:○1设计过程控制系统及整定控制参数;○2指导⽣产⼯艺及其设备的设计与操作;○3对被控过程进⾏仿真研究;○4培训运⾏操作⼈员;○5⼯业过程的故障检测与诊断。
2)要求:总的原则⼀是尽量简单,⼆是正确可靠。
阶次⼀般不⾼于三阶,⼤量采⽤具有纯滞后的⼀阶和⼆阶模型,最常⽤的是带纯滞后的⼀阶形式。
5-3 建⽴被控过程数学模型的⽅法有哪些?各有什么要求和局限性?解答:P1271)⽅法:机理法和测试法。
2)机理法:测试法:5-4 什么是流⼊量?什么是流出量?它们与控制系统的输⼊、输出信号有什么区别与联系?解答:1)流⼊量:把被控过程看作⼀个独⽴的隔离体,从外部流⼊被控过程的物质或能量流量称为流⼊量。
流出量:从被控过程流出的物质或能量流量称为流出量。
2)区别与联系:控制系统的输⼊量:控制变量和扰动变量。
控制系统的输出变量:系统的被控参数。
5-5 机理法建模⼀般适⽤于什么场合?解答:P128对被控过程的⼯作机理⾮常熟悉,被控参数与控制变量的变化都与物质和能量的流动与转换有密切关系。
5-6 什么是⾃衡特性?具有⾃衡特性被控过程的系统框图有什么特点?解答:1)在扰动作⽤破坏其平衡⼯况后,被控过程在没有外部⼲预的情况下⾃动恢复平衡的特性,称为⾃衡特性。
2)被控过程输出对扰动存在负反馈。
5-7 什么是单容过程和多容过程?解答:1)单容:只有⼀个储蓄容量。
2)多容:有⼀个以上储蓄容量。
5-8 什么是过程的滞后特性?滞后⼜哪⼏种?产⽣的原因是什么?解答:1)滞后特性:过程对于扰动的响应在时间上的滞后。
2)容量滞后:多容过程对于扰动的响应在时间上的这种延迟被称为容量滞后。
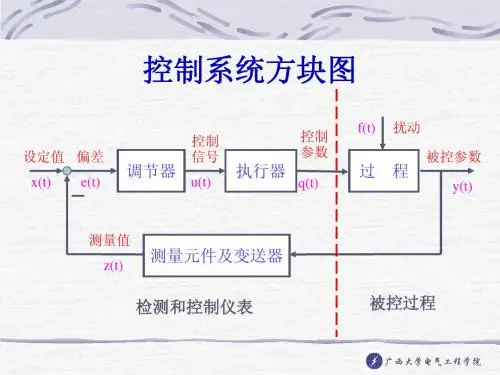
《过程控制》课程笔记第一章概论一、过程控制系统组成与分类1. 过程控制系统的基本组成过程控制系统主要由被控对象、控制器、执行器、检测仪表四个部分组成。
(1)被控对象:指生产过程中的各种设备、机器、容器等,它们是生产过程中需要控制的主要对象。
被控对象具有各种不同的特性,如线性、非线性、时变性等。
(2)控制器:控制器是过程控制系统的核心部分,它根据给定的控制策略,对检测仪表的信号进行处理,生成控制信号,驱动执行器动作,从而实现对被控对象的控制。
控制器的设计和选择直接影响控制效果。
(3)执行器:执行器是控制器与被控对象之间的桥梁,它接收控制器的信号,调节阀门的开度或者调节电机转速,从而实现对被控对象的控制。
执行器的响应速度和精度对控制系统的性能有很大影响。
(4)检测仪表:检测仪表用于实时测量被控对象的各项参数,如温度、压力、流量等,并将这些参数转换为电信号,传输给控制器。
检测仪表的准确性和灵敏度对控制系统的性能同样重要。
2. 过程控制系统的分类根据控制系统的结构特点,过程控制系统可以分为两大类:开环控制系统和闭环控制系统。
(1)开环控制系统:开环控制系统没有反馈环节,控制器根据给定的控制策略,直接生成控制信号,驱动执行器动作。
开环控制系统的优点是结构简单,成本低,但缺点是控制精度较低,容易受到外部干扰。
(2)闭环控制系统:闭环控制系统具有反馈环节,控制器根据检测仪表的信号,实时调整控制策略,生成控制信号,驱动执行器动作。
闭环控制系统的优点是控制精度高,抗干扰能力强,但缺点是结构复杂,成本较高。
二、过程控制系统性能指标1. 稳态误差:稳态误差是指系统在稳态时,输出值与设定值之间的差值。
稳态误差越小,表示系统的控制精度越高。
稳态误差可以通过调整控制器的参数来减小。
2. 动态性能:动态性能是指系统在过渡过程中,输出值随时间的变化规律。
动态性能指标包括上升时间、调整时间、超调量等。
动态性能的好坏直接影响到系统的响应速度和稳定性。