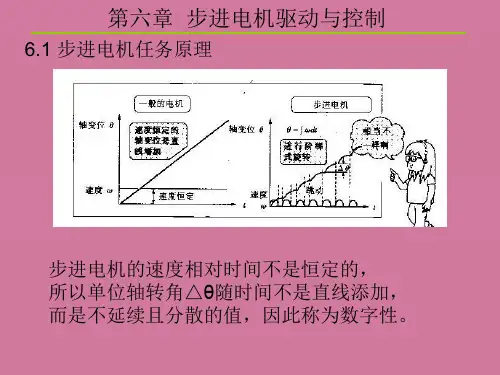
实际应用的步进电机如图所示 ,转子铁心和定子磁极上均有 齿距相等的小齿,且齿数要有 一定比例的配合。
步距角α=3600/mZk
式中:
m——定子相数
Z——转子齿数
k——整步或半步系数(整步为 1、半步为2)
例如:图a中,m=3,Z=4,假如 k=1,则α=3600/(3*4*1) =300
图b中,m=3,Z=40,假如k=1,则 α=3600(3*40*1)=30
(2)三相双三拍
1)通电顺序UV→VW→WU→UV顺序通电为正转(顺时针),反 之为反转(逆时针);
2)当UV相绕组通电时,1、4齿U、V对齐,当换成VW相通电时, 因为原来(a)图上的3、4齿距VW相主磁极近,所以3、4齿顺时 针转动一个步距角300后,3、4齿与VW相主磁极对齐。
3)由于双三拍控制每次有二相绕组通电,而且切换时总保持 一相绕组通电,所以工作比较稳定。
1、步进电动机分类
(1)按定子独立绕组数分 两相、三相、四相、五相、六相步进电机。
步进电动机的相数:指定子上的独立绕组数。 (2)按转子性质分
反应式—转子无励磁(无绕组)、也非永磁 铁。
永磁式—转子常为永久磁铁。
2、三相反应式步进电机结构
定子上有六个磁极,每个磁极上绕有 励磁绕组,每相对的两个磁极组成一相, 分成A、B、C三相。转子无绕组,它是由 带齿的铁心做成的。步进电机是按电磁吸 引的原理进行工作的。当定子绕组按顺序 轮流通电时,A、B、C三对磁极就依次产 生磁场,并每次对转子的某一对齿产生电 磁引力,将其吸引过来,而使转子一步步 转动。每当转子某一对齿的中心线与定子 磁极中心线对齐时,磁阻最小,转矩为零 。如果控制线路不停地按一定方向切换定 子绕组各相电流,转子便按一定方向不停 地转动。步进电机每次转过的角度称为步 距角。