由Morison方程计算桩基平台的波浪力
- 格式:doc
- 大小:438.00 KB
- 文档页数:5
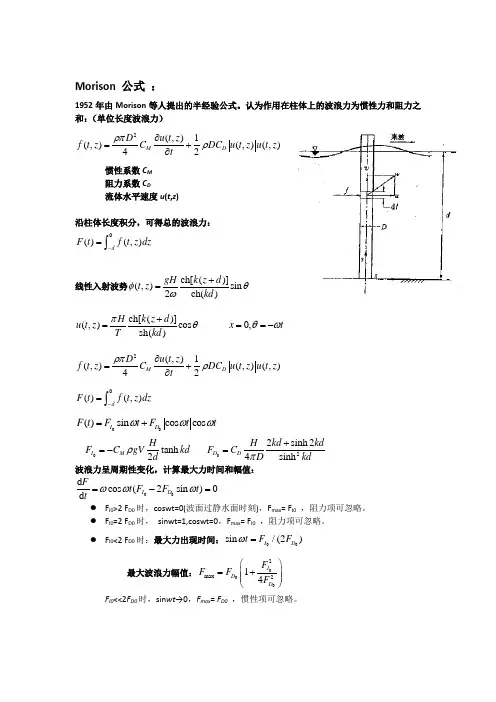
Morison 公式 :1952年由Morison 等人提出的半经验公式。
认为作用在柱体上的波浪力为惯性力和阻力之和:(单位长度波浪力)2(,)1(,)(,)(,)42MD D u t z f t z C DC u t z u t z t ρπρ∂=+∂ 惯性系数C M阻力系数C D流体水平速度u (t ,z )沿柱体长度积分,可得总的波浪力:()(,)dF t f t z dz -=⎰线性入射波势ch[()](,)sin 2ch()gH k z d t z kd φθω+=ch[()](,)cos sh()H k z d u t z Tkd πθ+=0,x t θω==-2(,)1(,)(,)(,)42MD D u t z f t z C DC u t z u t z t ρπρ∂=+∂ 0()(,)dF t f t z dz -=⎰00()sin cos cos I D F t F t F t t ωωω=+0t a n h 2I M H F C gVkd d ρ=- 022s i n h 24s i n h D D H kd kd F C D kdπ+= 波浪力呈周期性变化,计算最大力时间和幅值:00d cos (2sin )0d I D Ft F F t tωωω=-= ● F I0>2 F D0时,coswt=0(波面过静水面时刻),F max = F I0 ,阻力项可忽略。
● F I0=2 F D0时, sinwt=1,coswt=0,F max = F I0 ,阻力项可忽略。
● F I0<2 F D0时:最大力出现时间:00sin /(2)I D t F F ω=最大波浪力幅值:0002m a x 214I D DF F F F ⎛⎫=+ ⎪ ⎪⎝⎭F I0<<2F D0时,sin wt →0,F max = F D0 ,惯性项可忽略。
线性势流理论:控制方程为Laplace 方程:20ϕ∇= 边界条件:自由面运动学和动力学条件:z t ϕζ∂∂=∂∂ 0,0g z tϕζ∂+==∂统一的自由面条件:220,0g z t zϕϕ∂∂+==∂∂水底(平底)条件:0,z d zϕ∂==-∂物面条件:0Sn ϕ∂=∂无穷远处边界条件(Sommerfeld 辐射条件):0 R c tR ϕϕ→∞∂∂⎫+=⎪∂∂⎭速度势的分解:应用远端Sommerfeld 辐射条件,将速度势分解。
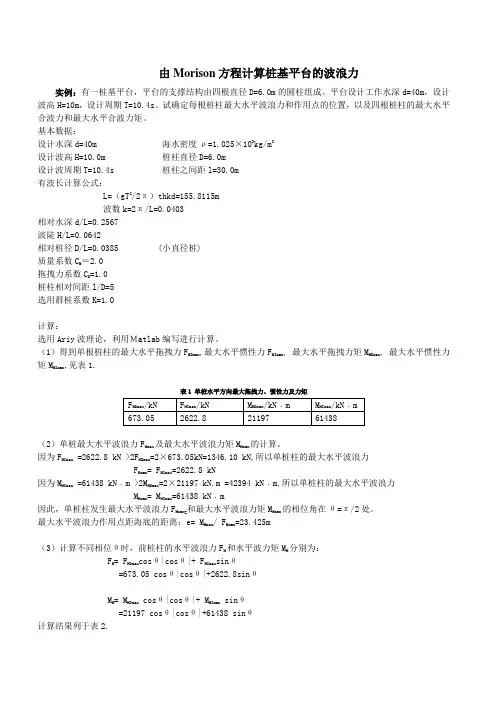
由Morison方程计算桩基平台的波浪力实例:有一桩基平台,平台的支撑结构由四根直径D=6.0m的圆柱组成。
平台设计工作水深d=40m,设计波高H=10m,设计周期T=10.4s。
试确定每根桩柱最大水平波浪力和作用点的位置,以及四根桩柱的最大水平合波力和最大水平合波力矩。
基本数据:设计水深d=40m 海水密度ρ=1.025×103kg/m3设计波高H=10.0m 桩柱直径D=6.0m设计波周期T=10.4s 桩柱之间距l=30.0m有波长计算公式:L=(gT2/2π)thkd=155.8115m波数k=2π/L=0.0403相对水深d/L=0.2567波陡H/L=0.0642相对桩径D/L=0.0385 (小直径桩)质量系数C M=2.0拖拽力系数C D=1.0桩柱相对间距l/D=5选用群桩系数K=1.0计算:选用Ariy波理论,利用Matlab编写进行计算。
(1)得到单根桩柱的最大水平拖拽力F HDmax,最大水平惯性力F HImax, 最大水平拖拽力矩M HDmax, 最大水平惯性力矩M HImax,见表1.表1 单桩水平方向最大拖拽力、惯性力及力矩(2)单桩最大水平波浪力F Hmax及最大水平波浪力矩M Hmax的计算。
因为F HImax =2622.8 kN >2F HDmax=2×673.05kN=1346.10 kN,所以单桩柱的最大水平波浪力F Hmax= F HImax=2622.8 kN因为M HImax =61438 kN﹒m >2M HDmax=2×21197 kN.m =42394 kN﹒m,所以单桩柱的最大水平波浪力M Hmax= M HImax=61438 kN﹒m因此,单桩柱发生最大水平波浪力F Hmax=和最大水平波浪力矩M Hmax的相位角在θ=π/2处。
最大水平波浪力作用点距海底的距离:e= M Hmax/ F Hmax=23.425m(3)计算不同相位θ时,前桩柱的水平波浪力F H和水平波力矩M H分别为:F H= F HDmax cosθ|cosθ|+ F HImax sinθ=673.05 cosθ|cosθ|+2622.8sinθM H= M HDmax cosθ|cosθ|+ M HImax sinθ=21197 cosθ|cosθ|+61438 sinθ计算结果列于表2.(4)利用表中数据绘制出前桩柱水平波浪力F H 随波浪相位角θ的变化曲线I 以及水平波浪力矩M H 随波浪相位角θ的变化曲线I (图1-2)。
中国石油大学海洋环境实验报告实验日期:2013.12.1U 成绩:_班级:海油11・2学号:11U221U6姓名:祁晓教师: 刘志惫同组者:杨凡.王玉亭、李贺、李金岩等. _________________________________________________________ 每空1分.共15分波浪对圆柱的作用力实验20131.实验目的恻柱是海洋工程中最常见的结构物之一。
通过线性波对圆柱的作用实验,让学生建立起波浪对结构物作用的基木概念.并r解测虽结构物上波浪力的方法和过程,以及对测虽结果的处理。
在此实验中.应注总波翌素、惯性力和阻力三者之间的相互关系。
2.实验内容(1)了解波浪力测:®的工作原理:(2)r解波浪力记录的要求和持点:(3)r解圆柱受力的特点和波浪力测量于•段:(4)分析实验结果。
3.实验设备(1)圆柱模型(塑料或铝合金)一根:(2)波商仪一套:(3)桩力传感器一套:(4)固定支座一套:(5)固定夹若干:(6)虽测系统一套:(7)圆柱固定器两个。
4.实验准备、方法与步骤4. 1实验准备将水槽充水,调整适X的水深:然后将长50 cm,直径Q3.5 cm的圆柱装在固定支座上,装好相应的传感器.接通虽测系统:将整个模型总成安装在水槽上并固定好,再将波岛仪传感器固定在圆柱的卫 二ML 上。
然后开动造波机造波。
4.2实验十波浪作用在圆柱上时,要仔细观察恻柱迎波面上的溅髙和离波向的涡流:同时开起_波阳仪 和虽测系统的采样开关,记录波浪和作用力的过程线,记录10〜20个周期。
并仔细作好各种标记和观测记 录。
可采用相同或不相同的波要素重复进行3〜5次实验,将%次的观测结果填表记录。
4. 3作用力的计算根据观测记录求出波浪耍素和波浪对闘柱的作用力。
波浪对圆柱的作用力由惯性力陥和阻力(拖曳力)Fm >两部分组成,可用»orison 方程进行 计算. 该方程为:I凡5+氐=防” •专+产・0讪“式中:C M —质虽系数:可取2.0C D —阻力系数;可取1.2圆柱单位长度的投影面积: 水质点速度的水平分量:K-波数: d —水深:T —波浪周期: 0—相位角。
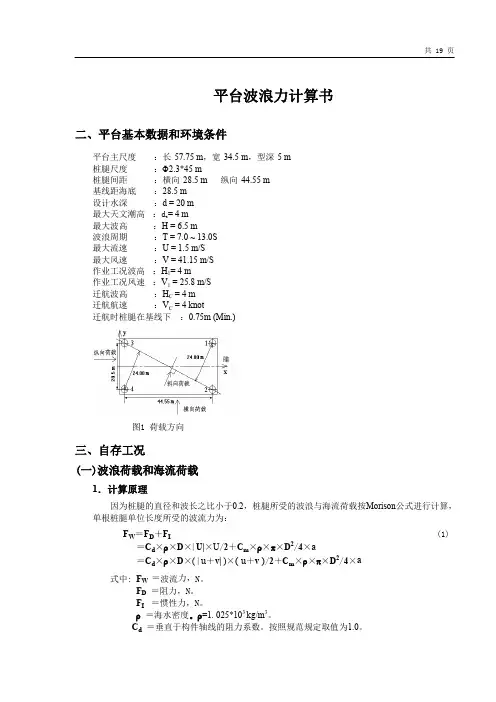
共 19 页平台波浪力计算书二、平台基本数据和环境条件平台主尺度:长57.75 m,宽34.5 m,型深5 m桩腿尺度:Φ2.3*45 m桩腿间距:横向28.5 m 纵向44.55 m基线距海底:28.5 m设计水深:d = 20 m最大天文潮高:d t= 4 m最大波高:H = 6.5 m波浪周期:T = 7.0 ~ 13.0S最大流速:U = 1.5 m/S最大风速:V = 41.15 m/S作业工况波高:H1= 4 m作业工况风速:V1 = 25.8 m/S迁航波高:H C = 4 m迁航航速:V C = 4 knot迁航时桩腿在基线下:0.75m (Min.)图1 荷载方向三、自存工况(一)波浪荷载和海流荷载1.计算原理因为桩腿的直径和波长之比小于0.2,桩腿所受的波浪与海流荷载按Morison公式进行计算,单根桩腿单位长度所受的波流力为:F W=F D+F I (1)=C d×ρ×D×| U|×U/2+C m×ρ×π×D2/4×a=C d×ρ×D×( | u+v| )×( u+v )/2+C m×ρ×π×D2/4×a式中: F W =波流力,N。
F D=阻力,N。
F I=惯性力,N。
ρ=海水密度。
ρ=1. 025*103 kg/m3。
C d=垂直于构件轴线的阻力系数。
按照规范规定取值为1.0。
C m =惯性力系数。
按照规范规定取值为2.0 。
D =构件的直径。
D =2.3m 。
U =垂直于构件轴线的水质点相对于构件的总速度分量,m/s 。
u =垂直于构件轴线的波浪引起的水质点相对于构件的速度分量,m/s 。
v =垂直于构件轴线的海流引起的水质点速度分量。
计算中海流的方 向取和波浪相同的方向,v = 1.5m/s 。
a =垂直于构件轴线的水质点相对于构件的加速度分量,m/s 2。
Morison方程
在研究近海固定式结构在波浪中的受力问题.近海结构的受力研究是海洋工程领域最为重要的专题,其中桩柱波浪力的研究是其结构受力研究的基础.对小构件,即构件直径与入射波的波长相比尺度较小的结构物,采用1950年Morison等提出的方法计算波浪力.Morison方程从根本上说是经验公式,以波浪质点速度、加速度和柱体直径为参数计算各水深处波浪力,然后沿柱长积分得到桩柱波浪力。
[1]
主要计算公式
莫里森等认为作用于柱体任意高度z处的水平波浪力f H包括两个分量:
1. 水平拖曳力f D——波浪水质点的水平速度u x引起的对柱体的作用力
其大小与单向定常水流作用在柱体上的拖曳力模式相同,即与波浪水质点的水平速度的平方和单位柱高垂直于波向的投影面积成正比。
不同的是波浪水质点作周期性的往复的振荡运动,水平速度是时正时负,因而对柱体的拖曳力也是时正时负;
2. 水平惯性力f I——水质点运动的水平加速度引起的对柱体的作用力。
海洋技术第28卷1前言风力发电是一种清洁的能源利用方式。
随着风力发电技术的发展,海上风力发电因为其丰富的海上风资源已经成为风力发电的新领域。
目前欧洲国家已经成功建立了自己的海上风电场,证实了海上风力发电是可行的。
中国具有很长的岸线,近海海域有很丰富的风资源,能充分利用这些风能,将有助于解决我国的能源和环境问题。
目前海上风力发电基础的设计要考虑海床的地质结构情况、离岸距离、海上风和浪的荷载特性以及海流、冰等的影响。
海上风力发电机基础结构从结构型式上可以分为重力固定式、支柱固定式、浮置式基础和桶形基础[1]。
海上波浪荷载和海流荷载是风力发电机基础的主要荷载,在进行单桩或多桩基础结构设计时,通常按照小直径结构物来进行计算。
小直径结构物是指当构件直径D 与波长L 相比很小(D/L <0.15)时的结构物,因为当构件为小直径结构物时,波浪场基本上不受构件存在的影响而传播。
小直径构件波浪力的计算至今仍采用Morison 公式,本文采用Stokes 波二阶理论计算水质点运动的速度及加速度,考虑了规则波波流共同作用下的波浪要素变形,计算了波流不同夹角下的波浪变形要素和海上风机桩基础的波流力。
2计算原理Morison 公式应首先假定:(1)桩柱表面是光滑的;(2)在单桩波流力计算中,波动水质点的速度与加速度采用线性波理论进行计算,且在波流共同作用下水质点的速度与加速度为波(与水流相互作用变形后的波)、流各自产生的速度与加速度的矢量和。
2.1Morison 公式Morison 公式主要用来计算小直径圆柱的波浪力,其具体公式如下:F=F d +F i (1)(2)(3)式中:u 为波动水质点的速度;为波动水质点的加速度;F 为总波浪力;F i 为惯性力;F d 为速度力;C d 为速度力系数;C m 为惯性力系数;ρ为水的密度;D 为圆柱直径。
2.2水质点速度及加速度计算(1)纯波浪作用按Stokes 二阶波理论,波面方程为:(4)波动水质点的速度与加速度分别为:(5)(6)(7)(8)上述各式中:H 为波高;T 为周期;d 为水深;g 为重力加速度;k 为波数;L 为波长;ω为波浪频率;脚标λ代表波向;z 代表垂向[2]。
海洋桩基水动力系数的确定方法研究作者:陈子璇来源:《数码设计》2017年第14期摘要:采用会战谱对海浪进行不规则波的模拟,将利用瞬时值法、傅里叶分析法、最小二乘法和《海港水文规范》确定、美国API确定的惯性力系数CM和拖曳力系数C n,代入通过Borgman L.E方程线性化后的Morison方程中,计算得到桩身所受波浪力时程曲线,分析得到几种确定C M和C D的方法的优劣。
结果表明,傅里叶分析法和最小二乘法确定的C M和C D较为接近且合理。
关键词:海洋桩基;水动力系数;傅里叶分析法;最小二乘法;波浪力中图分类号:TV312 文献标识码:A 文章编号:1672-9129(2017)14-0024-021引言桩基结构是海洋风电基础中适用于近海海域的结构形式。
在桩基稳定性计算中,基桩的波浪力计算至关重要。
目前计算小直径桩的波浪力一般采用莫里森方程,其中的关键是合理确定惯性力系数C M和拖曳力系数C D。
目前确定C M和C D的主要有三种,一是利用瞬时值计算数C M和C D,二是利用傅里叶分析法计算C M和C D,三是利用最小二乘法计算C M和C D。
本文就针对这三种计算方法并结合《海港水文规范》以及美国API中所规定的C M和C D,分析这几种方法的优劣。
2惯性力系数C M和拖曳力系数C D的确定2.1瞬时值计算C M和C D。
根据线性波理论,当cosωt=0时,速度u=0,加速度a有极值,利用该瞬时波浪力资料可计算C M值;当sinωt=O时,加速度a=0,速度u有极值,利用该瞬时波浪力资料可计算C D的值。
这种方法虽然计算简单,但必须保证所取瞬时资料的速度及加速度两个量中,一个值为极值,同时另一个为0.由于波浪的非线性效应,这一条件不一定能够成立。
此外,还应考虑观测资料的某些不规律性。
为了减小这种不规律性对结果所造成的误差,有时对此瞬时附近的一个小时段取多个值,分析后进行平均。
2.2傅里叶分析法计算C M和C D。
Morison方程
在研究近海固定式结构在波浪中的受力问题.近海结构的受力研究是海洋工程领域最为重要的专题,其中桩柱波浪力的研究是其结构受力研究的基础.对小构件,即构件直径与入射波的波长相比尺度较小的结构物,采用1950年Morison等提出的方法计算波浪力.Morison方程从根本上说是经验公式,以波浪质点速度、加速度和柱体直径为参数计算各水深处波浪力,然后沿柱长积分得到桩柱波浪力。
[1]
主要计算公式
莫里森等认为作用于柱体任意高度z处的水平波浪力f H包括两个分量:
1. 水平拖曳力f D——波浪水质点的水平速度u x引起的对柱体的作用力
其大小与单向定常水流作用在柱体上的拖曳力模式相同,即与波浪水质点的水平速度的平方和单位柱高垂直于波向的投影面积成正比。
不同的是波浪水质点作周期性的往复的振荡运动,水平速度是时正时负,因而对柱体的拖曳力也是时正时负;
2. 水平惯性力f I——水质点运动的水平加速度引起的对柱体的作用力。
半潜式平台撑杆结构波浪载荷计算方法研究李辉,任慧龙,吴东伟,张健(哈尔滨工程大学船舶工程学院 哈尔滨市 150001)摘 要:考虑平台与波浪的相对运动,对适用于空间倾斜构件的Morison 公式进行了线性化处理。
将依据该公式算得的Morison 力计入基于三维势流理论建立的平台整体运动方程中,采用迭代法进行求解。
对一艘半潜式平台的计算结果表明,平台撑杆所遭受的Morison 力对平台整体运动的影响较小。
关键词:半潜式平台;撑杆;Morison 公式;线性化随着全球经济的发展,人类对油气资源的需求与日俱增。
陆地上资源的日益枯竭,人们逐渐把目光投向了海洋,并正在向深海区域发展。
半潜式平台因其自身明显的优势逐渐成为海洋油气资源开发最主要的工具之一。
由于半潜式平台的工作环境一般比较恶劣,发生事故的可能性较大,因而在设计阶段就要对其结构进行合理的强度评估,以保证其结构的安全性。
而准确的预报平台在使用期间可能遭受的波浪载荷是强度评估正确进行的关键。
对于海洋平台波浪载荷的计算,一般可采用两种方法[1]。
一种是采用适用于大尺度构件的基于势流理论的波浪载荷计算方法,另一种是采用基于经验的适用于小尺度构件的Morison 公式。
半潜式平台在水面以下既有尺度较大的构件如旁通和立柱,又有尺度较小的构件如撑杆,因而在确定其波浪载荷时,需要将两种方法结合起来使用[2]。
由于Morison 公式中含有非线性项(拖曳力项),要与目前较为通用的基于三维线性势流理论的波浪载荷计算方法联合使用,需要对其进行线性化处理。
为了合理预报半潜式平台的运动与波浪载荷,将Morison 公式与三维线性势流理论联合使用。
采用考虑平台与波浪相对运动的适用于倾斜构件的Morison 公式,应用Borgman 方法[3]进行线性化。
将采用Morison 公式算得的撑杆结构的波浪载荷计入平台的整体运动微分方程。
结合实际算例对半潜式平台撑杆结构受力对于平台整体运动的贡献进行了分析。
海上风力发电机组桩体波浪力计算分析金家坤;曹蛟龙;刘光明【摘要】为快速校核海上风力发电机组单桩在波流联合载荷作用下的结构安全,基于Morison公式和谱分析方法分别推导中等水深下单桩的波浪力解析计算公式,并通过Matlab软件编程计算.结果表明,两种波浪力计算方法简便可行,各具优势,可依据实际海况和不同的设计方式选择应用.【期刊名称】《船海工程》【年(卷),期】2015(044)003【总页数】5页(P70-74)【关键词】海上风力发电机组;单桩;波浪力;Morison公式;谱分析【作者】金家坤;曹蛟龙;刘光明【作者单位】中国船级社武汉规范研究所,武汉430022;中国船级社武汉规范研究所,武汉430022;中国船级社武汉规范研究所,武汉430022【正文语种】中文【中图分类】U661.1同陆上风电场相比,海上风力发电机组拥有平均风速高、湍流强度小及不占土地等优点,但是其外部条件要比陆上复杂,除受风力作用外,还要受波浪、海流等海洋载荷的作用。
根据文献[1]分析,作用在海上风力发电机组上的波浪载荷和风载荷是同一数量级的,因此有必要讨论海上风力发电机组所受的波浪载荷。
根据国内外海上风力发电机组的单桩波浪力研究[2-4]可知,波浪力的计算基本采用的是Morison公式,并依据相关的国际标准[5]或不同船级社规范[6-7]选取合适的波浪理论进行分析。
本文根据中国船级社《海上风力发电机组认证规范》[8]的相关要求,分别运用Morison公式和谱分析方法,推导中等水深下海上风力发电机组单桩上的波浪力计算公式。
Morison公式的适用条件为桩体直径与波长之比小于0.2。
在中等水深下,海上风力发电机组的单桩直径远小于波长,可采用Morison公式计算波浪载荷。
海上风力发电机组桩体单位高度上的水平波浪力可按式f为式中:u,˙u——桩体轴中心位置处水质点的水平速度和水平加速度;C D——阻力系数C M——惯性力系数;ρ——海水密度;D——桩体直径;A——桩体横截面的面积,为得到作用于整个桩体上的波浪力,将式(1)沿高度积分。
波浪对桩柱作用力的计算分析港口码头、跨海桥梁、海洋工程中经常遇到波浪力对桩柱的作用,水中的桩柱结构所受的水平力主要来自波浪的作用。
对于一般的桩柱结构,当桩柱的直径D与波浪的波长L的比值D/L<0.2时,称此结构为小尺度结构物;当D/L>0.2时,则称为大尺度结构物[1]。
港口码头、跨海桥梁、海洋工程常用的桩柱结构,一般为小尺度结构物,因此本文重点探究小尺度结构物的波浪力计算。
1 波浪力的计算方法国内外对波浪力的计算理论相差不大,都是基于Morison公式[2]內对波浪力的计算主要有《海港水文规范》规定的方法,国外对波浪力的计算有美国的API、挪威的DNV等标准提出的方法。
基于Morison理论的波浪力计算公式如下:(公式-1)(公式-2)(公式-3)上式中:PD是波浪力的速度分力(也叫拖曳力);PI是波浪力的惯性分力;CD是速度力系数;CM是质量力系数;D是桩柱直径;dz是桩柱上每一小分段的长度;A是桩柱的断面积。
u、u/t——分别为水质点轨道运动的水平速度和水平加速度;是圆频率;t是时间,当波峰通过柱体中心线时t=0;H、T分别是波高和波周期。
美国的API规范给出拖曳力系数取0.6~1.0,惯性力系数取2.0。
国内的《海港水文规范》给出拖曳力系数取1.2,惯性力系数取2.0。
《海港水文规范》提出的拖曳力系数和惯性力系数比较适合我国的情况,因此本文以《海港水文规范》给出拖曳力系数1.2、惯性力系数2.0进行波浪力计算。
2 波浪力随高度和时间的变化趋势本文模拟了一个我国东部沿海的项目的桩基,该项目水深10m,采用垂直的钢管桩,桩体直径2.5m。
计算海浪的波长72m,波高3.9m,波周期7.8s。
采用Excel对周期T内的各时间点、沿桩柱各高度的拖曳力和惯性力的分力分别进行计算,然后用数值积分的方法将各分力沿桩柱高度进行积分,得出各时间点作用在桩柱上的波浪力的合力。
为考察波浪力随桩体高度变化趋势,按照公式1~3,将桩体在平均海平面以上分为10等份,在平均海平面以上分为2等份,进行拖曳力和惯性力计算。
考虑桩基循环弱化的深水导管架谱疲劳分析
田凯;杜皓文;刘杰;王宁辉;杨涵婷;李冬梅
【期刊名称】《石油工程建设》
【年(卷),期】2024(50)3
【摘要】深水导管架平台长期承受复杂环境载荷,由于环境循环载荷的影响将引起桩基周围土壤特性的变化而产生承载力弱化的现象。
以200m水深导管架平台为
研究对象,由Morison方程和Stokes波浪理论获得波浪载荷和水质点速度,通过分析确定疲劳损伤中心并建立其传递函数,从而计算出各方向的波浪响应,根据Palmgren-Miner线性疲劳累积损伤理论,开展了考虑桩基弱化的波浪谱疲劳分析。
通过案例分析发现,考虑桩基弱化影响将减少导管架平台的疲劳寿命。
【总页数】5页(P6-10)
【作者】田凯;杜皓文;刘杰;王宁辉;杨涵婷;李冬梅
【作者单位】中国石油集团海洋工程有限公司工程设计院;中国石油大学(北京)安全与海洋工程学院;中国石油辽河油田金海采油厂
【正文语种】中文
【中图分类】U44
【相关文献】
1.基于谱分析法的深水导管架平台疲劳寿命可靠性分析
2.大型开敞式深水码头导管架结构管节点的疲劳分析
3.深水桩基导管架平台随机波浪动力响应分析
4.深水导
管架海洋平台随机疲劳寿命可靠性分析5.考虑隔水导管群桩基作用的导管架平台强度分析方法
因版权原因,仅展示原文概要,查看原文内容请购买。
考虑流固耦合影响的桩基波浪力简化计算方法王元战;龙俞辰;王朝阳【摘要】离岸深水全直桩码头,由于其桩基的自由高度大、柔度增加、自振周期长,且位于无掩护开敞海域,波浪与结构相互作用问题突出.如何考虑流固耦合作用对桩上波浪力的影响,并建立便于工程应用的计算方法,是工程实践提出的亟待解决的课题.文中利用有限元软件ADINA建立了水体和桩基结构相互作用的三维有限元数值模型,并采用有限元数值模型对考虑流固耦合影响的改进Morison波浪力计算公式进行了验证.采用改进Morison波浪力计算公式研究了流固耦合对桩身波浪力的影响,并给出了考虑流固耦合影响的波浪力放大系数图表.在此基础上,提出了考虑流固耦合影响的波浪力简化计算方法.【期刊名称】《水道港口》【年(卷),期】2014(035)002【总页数】6页(P93-98)【关键词】流固耦合;桩基波浪力;有限元模型;非线性Morison方程;简化计算方法【作者】王元战;龙俞辰;王朝阳【作者单位】天津大学水利工程仿真与安全国家重点实验室,天津市港口与海洋工程重点实验室,天津300072;天津大学水利工程仿真与安全国家重点实验室,天津市港口与海洋工程重点实验室,天津300072;天津大学水利工程仿真与安全国家重点实验室,天津市港口与海洋工程重点实验室,天津300072【正文语种】中文【中图分类】TV135.6;O242.1Biography:WANG Yuan⁃zhan(1958-),male,professor.为适应船舶大型化和码头专业化的需求,港口工程建设向离岸、无掩护深水域发展。
从国内外已有工程实践看,典型的离岸深水结构是桩基式结构。
离岸深水环境下,基桩自由高度较传统结构形式大、柔度增加、自振周期较长,且位于无掩护的开敞海域,波浪与结构相互作用问题突出。
波浪作用引起结构运动,同时结构运动也会对波浪力产生影响。
如何考虑流固耦合作用对桩上波浪力的影响,并建立简单实用的计算方法来考虑波浪与桩基结构的相互作用,是工程实践提出的亟待解决的课题。
由Morison方程计算桩基平台的波浪力
实例:有一桩基平台,平台的支撑结构由四根直径D=6.0m的圆柱组成。
平台设计工作水深d=40m,设计波高H=10m,设计周期T=10.4s。
试确定每根桩柱最大水平波浪力和作用点的位置,以及四根桩柱的最大水平合波力和最大水平合波力矩。
基本数据:
设计水深d=40m 海水密度ρ=1.025×103kg/m3
设计波高H=10.0m 桩柱直径D=6.0m
设计波周期T=10.4s 桩柱之间距l=30.0m
有波长计算公式:
L=(gT2/2π)thkd=155.8115m
波数k=2π/L=0.0403
相对水深d/L=0.2567
波陡H/L=0.0642
相对桩径D/L=0.0385 (小直径桩)
质量系数C M=2.0
拖拽力系数C D=1.0
桩柱相对间距l/D=5
选用群桩系数K=1.0
计算:
选用Ariy波理论,利用Matlab编写进行计算。
(1)得到单根桩柱的最大水平拖拽力F HDmax,最大水平惯性力F HImax, 最大水平拖拽力矩M HDmax, 最大水平惯性力矩M HImax,见表1.
表1 单桩水平方向最大拖拽力、惯性力及力矩
(2)单桩最大水平波浪力F Hmax及最大水平波浪力矩M Hmax的计算。
因为F HImax =2622.8 kN >2F HDmax=2×673.05kN=1346.10 kN,所以单桩柱的最大水平波浪力
F Hmax= F HImax=2622.8 kN
因为M HImax =61438 kN﹒m >2M HDmax=2×21197 kN.m =42394 kN﹒m,所以单桩柱的最大水平波浪力
M Hmax= M HImax=61438 kN﹒m
因此,单桩柱发生最大水平波浪力F Hmax=和最大水平波浪力矩M Hmax的相位角在θ=π/2处。
最大水平波浪力作用点距海底的距离:e= M Hmax/ F Hmax=23.425m
(3)计算不同相位θ时,前桩柱的水平波浪力F H和水平波力矩M H分别为:
F H= F HDmax cosθ|cosθ|+ F HImax sinθ
=673.05 cosθ|cosθ|+2622.8sinθ
M H= M HDmax cosθ|cosθ|+ M HImax sinθ
=21197 cosθ|cosθ|+61438 sinθ
计算结果列于表2.
(4)利用表中数据绘制出前桩柱水平波浪力F H 随波浪相位角θ的变化曲线I 以及水平波浪力矩M H 随波浪相位角θ的变化曲线I (图1-2)。
(5)排成一行的前后两桩柱的最大水平合波力2
H max
1
F ∑(
)
以及最大水平和波力矩2
H max
1
M ∑()的确定。
以前桩为基准准,绘制前桩柱F H ~θ的关系曲线I ,前后两桩柱的相位差(l/L )×360。
=69.315。
,将曲
线I 沿坐标负方向平移69.315。
,即得到相应于前桩柱波浪相位的后桩柱的F H ~θ的 曲线II 。
将曲线I 和曲线II 叠加,得到前后两桩柱水平合波力
2
H
1
F
∑~θ的合成曲线I+II ,从合成曲线I+II 查得前后两桩柱的最
大水平合波力2
H max
1
F ∑(
)
=4.4823MN ,其相应的相位角θ=40。
同理可得前后两桩柱的最大水平合波力矩
2
H max
1
M ∑()=107.7MN ﹒m ,其相应的相位角θ=40。
(6)四根圆桩柱的最大水平合波力
4
H max
1
F ∑()
=4.4823×2= 8.9646 MN ,四根圆桩柱的最大水平合波力矩
4
H max 1
M ()=107.7×2=215.4 M N ﹒m 。
(7)Matlab 程序:
clc; clear all; format short e;
d=40;H=10;CD=1;r=1.025*1000*9.8;D=6;H=10;CM=2;L=155.8115;k=0.0403;l=30; %基本数据
K1=(2*k*(d+H/2)+sinh(2*k*(d+H/2)))/(8*sinh(2*k*d)); K2=tanh(k*d);
K3=(1/(32*sinh(2*k*d)))*(2*k^2*(d+H/2)^2+2*k*(d+H/2)*sinh(2*k*(d+H/2))-cosh(2*k*(d+H/2))+1); K4=(1/(cosh(k*d)))*(k*d*sinh(k*d)-cosh(k*d)+1);
%计算最大水平拖拽力、最大水平惯性力、最大水平拖拽力矩及最大水平惯性力矩时的系数 FHDmax=CD*r*D*H^2*K1/2 %最大水平拖拽力 FHImax=CM*r*pi*D^2*H*K2/8 %最大水平惯性力
MHDmax=CD*r*D*H^2*L*K3/3.14/2 %最大水平拖拽力矩
MHImax=CM*r*D^2*H*L*K4/16 %计算最大水平惯性力矩
if FHImax>=2*FHDmax
FHmax=FHImax
elseif FHImax<FHDmax
FHmax=FHDmax*(1+0.25*(FHImax/FHDmax)^2)
else
FHmax='error';
end %计算最大水平力
if MHImax>=2*MHDmax
MHmax=MHImax
elseif MHImax<MHDmax
MHmax=MHDmax*(1+0.25*(MHImax/MHDmax)^2)
else
MHmax='error'
end %计算最大力矩
e=MHmax/FHmax %最大水平波力作用点距海底的距离
o=(0:10:180)';
o0=(l/L)*360
o1=((0-o0):10:(180-o0))';
o3=(-50:5:130)';
FH=FHDmax*diag(cosd(o))*abs(cosd(o))+FHmax*sind(o)
FH1=FHDmax*diag(cosd(o3))*abs(cosd(o3))+FHmax*sind(o3)+...
FHDmax*diag(cosd(o3+o0))*abs(cosd(o3+o0))+FHmax*sind(o3+o0)
%不同相位o时,桩柱的水平波浪力
MH=MHDmax*diag(cosd(o))*abs(cosd(o))+MHmax*sind(o)
MH1=MHDmax*diag(cosd(o3))*abs(cosd(o3))+MHmax*sind(o3)+...
MHDmax*diag(cosd(o3+o0))*abs(cosd(o3+o0))+MHmax*sind(o3+o0)
%不同相位o时,桩柱的水平波力矩
figure(1)
plot(o,FH,'-rs',o1,FH,'-gp',o3,FH1,'-m.');
text(150,1e6,'前桩I');
text(70,1.6e6,'后桩II');
text(30,4.6e6,'前桩I+后桩II');
title('图1 前后(前+后)桩柱的水平波浪力随相位角的变化');
xlabel('相位角\theta变化(^。
)');
ylabel('桩柱的水平波浪力(N)');
legend('\it前桩I', '\it后桩II', '\it前桩I+后桩II')
grid minor
%前桩,后桩及前桩+后桩柱的水平波浪力随相位角的变化图
figure(2)
plot(o,MH,'-rs',o1,MH,'-gp',o3,MH1,'-m.')
text(150,2e7,'前桩I');
text(100,-1e7,'后桩II');
text(10,11.2e7,'前桩I+后桩II');
title(' 图2 前后(前+后)桩柱的水平波浪力矩随相位角的变化'); xlabel('相位角\theta变化(^。
)');
ylabel('桩柱的水平波浪力矩(N.m)');
legend('\it前桩I', '\it后桩II', '\it前桩I+后桩II')
grid minor
%前桩,后桩及前桩+后桩柱的水平波浪力矩随相位角的变化图
FH4max=max(FH1)*2 %4根桩柱的最大水平合波力
MH4max=max(MH1)*2 %4根桩柱的最大水平合波力矩。