指针式仪表自动读数识别系统设计
- 格式:doc
- 大小:2.50 MB
- 文档页数:40
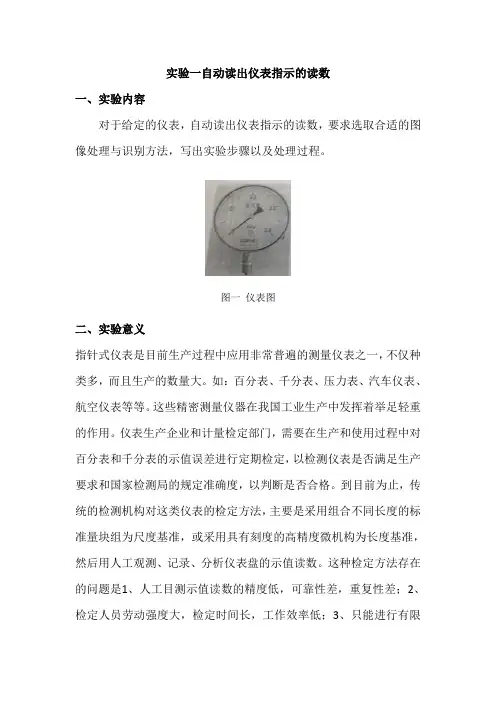
实验一自动读出仪表指示的读数一、实验内容对于给定的仪表,自动读出仪表指示的读数,要求选取合适的图像处理与识别方法,写出实验步骤以及处理过程。
图一仪表图二、实验意义指针式仪表是目前生产过程中应用非常普遍的测量仪表之一,不仅种类多,而且生产的数量大。
如:百分表、千分表、压力表、汽车仪表、航空仪表等等。
这些精密测量仪器在我国工业生产中发挥着举足轻重的作用。
仪表生产企业和计量检定部门,需要在生产和使用过程中对百分表和千分表的示值误差进行定期检定,以检测仪表是否满足生产要求和国家检测局的规定准确度,以判断是否合格。
到目前为止,传统的检测机构对这类仪表的检定方法,主要是采用组合不同长度的标准量块组为尺度基准,或采用具有刻度的高精度微机构为长度基准,然后用人工观测、记录、分析仪表盘的示值读数。
这种检定方法存在的问题是1、人工目测示值读数的精度低,可靠性差,重复性差;2、检定人员劳动强度大,检定时间长,工作效率低;3、只能进行有限位置上的定点的检测,灵活性和通用性差。
4、手工计算效率低,而且一次只能给出单点的误差值,无法得到完整的误差分析。
因此,针对我国目前所普遍采用的传统检定方法,尽快研制出一种能够快速、准确、稳定的全自动指针式仪表的自动检定系统,将对我国的仪表生产和检定起到巨大的推动作用。
数字图像处理技术(Digital Image Processing Techn0109y)是一门通过数字化的方法利用计算机对图像进行处理(包括图像的输入、输出,图像的增强、调整、变换,图像的特征提取,图像的分析与识别等)的新技术。
通常所说的数字图像处理是指计算机进行的处理,因此也称为计算机图像处理(conlputer Image Processing)。
数字图像处理研究的主要内容包括:(1)图像变换由于图像阵列很大,直接在空间域中进行处理,涉及计算量很大,因此,往往采用各种图像变换的方法(如傅立叶变换、沃尔什变换、离散余弦变换等间接处理技术)将空间域的处理转换为变换域的处理。
表盘定位与自动读数的指针式表计数值识别方法及系统表盘定位与自动读数的指针式表计数值识别方法及系统导言表盘定位与自动读数的指针式表计数值识别方法及系统是一种基于计算机视觉和图像处理技术的创新应用,能够有效实现对指针式表盘上的计数值进行自动识别和读数。
这一系统的出现不仅提高了读数的准确性和效率,而且极大地减轻了人力成本。
本文将从简单介绍表盘定位与自动读数的基本原理入手,逐步深入探讨其背后的核心技术和重要应用,以及对这个主题的个人观点和理解。
一、表盘定位与自动读数的基本原理1. 表盘定位:表盘定位是指通过计算机视觉技术中的图像处理和模式识别算法,对表盘上的指针进行精确定位。
这一步骤的关键是准确识别表盘的形状和位置,并将指针定位在正确的位置上。
基于图像处理的表盘定位方法可以分为两类:特征匹配和模板匹配。
特征匹配方法通过提取表盘上的独特特征点,将其与预先构建的特征库进行匹配,从而确定表盘的位置。
模板匹配方法则是通过事先定义并保存表盘的模板图像,再将其与采集到的实时图像进行比对,以获取准确的表盘位置。
2. 自动读数:自动读数是指通过计算机视觉技术对表盘上指针的位置进行识别,并将其对应的计数值自动输出。
在表盘定位的基础上,自动读数主要涉及指针检测和计算值的提取。
指针检测是指通过图像分割技术将指针与表盘分离,并对指针进行形状检测和边缘检测,以获取准确的指针位置。
计算值的提取则是通过图像处理和数值计算技术,将指针的位置转换为对应的计数值。
二、表盘定位与自动读数的核心技术1. 计算机视觉技术:计算机视觉技术是表盘定位与自动读数的核心技术之一。
它主要包括图像采集、图像处理、特征提取和模式识别等多个方面。
图像采集是指通过摄像机等设备获取表盘的实时图像,为后续处理打下基础。
图像处理则是对采集到的图像进行去噪、增强、分割等操作,以提高图像质量和准确度。
特征提取则是通过算法和数值计算,获取表盘上的关键特征信息,以辅助指针的定位和识别。
基于树莓派的指针式仪表读数自动识别系统设计
张鑫;李海荣;张国栋;李晓华
【期刊名称】《数据通信》
【年(卷),期】2024()2
【摘要】针对指针式仪表读数识别过程中表盘定位精度不高、量程手动输入、自动化程度低的问题,提出了基于改进的完全局部二值模式(CLBP)的表盘特征提取算法,结合支持向量机(SVM)和图像下采样方法,实现表盘精准定位,设计仪表量程自动获取方法,实现量程的自动获取,减少工作量。
以树莓派为硬件平台,设计指针式仪表读数自动识别系统。
测试表明,读数识别相对误差在2%以内,识别平均时间为534 ms/次。
【总页数】7页(P12-17)
【作者】张鑫;李海荣;张国栋;李晓华
【作者单位】新疆理工学院信息工程学院
【正文语种】中文
【中图分类】TN919
【相关文献】
1.一种复杂指针式仪表的读数自动识别算法
2.指针式仪表读数自动识别算法及系统研究
3.变电站指针式仪表自动读数系统设计
4.钻井现场指针式仪表读数自动识别方法研究
5.基于轻量级图像语义分割模型的指针式仪表读数全自动识别
因版权原因,仅展示原文概要,查看原文内容请购买。
指针式仪表自动识别装置的设计丁婵;温宗周;刘丹【摘要】针对指针式仪表人眼读数效率低,不能转化成数字信号输入计算机,提出一种基于Hough变换的指针式仪表自动判读方法.该方法运用图像减影技术,通过调节图像分辨率实现指针的检出,再利用Hough变换做峰值检测、线检测和链接,通过转换偏转角度的基线位置,确定出仪表指针的读数.实验表明,该方法能快速有效地完成指针式仪表的自动判读,且最大不确定度明显优于人眼的识别,具有较高的精度.%Due to the problem of the analog meter signal can not be converted into digital signal input into computer,and the low efficiency of the human eye for the analog meter reading, a method was developed based on the Hough transform for pointer instrument identification. The gauge board image was gained from CCD and transformed into digital signal, extracting two pointers by adjusting the image resolution with Image Subtraction. By using Hough transformation to peak detection, line detection and link,with transferring the position of the baseline, the date of point instrument has been identified. The higher precision of the operator has been proved by the experiment. And the maximum uncertainty of the pointer's position in the analog instruments is less than the discrimination of the human eye.【期刊名称】《西安工程大学学报》【年(卷),期】2011(025)001【总页数】4页(P78-81)【关键词】减影技术;Hough变换;基线【作者】丁婵;温宗周;刘丹【作者单位】西安工程大学,电子信息学院,陕西,西安,710048;西安工程大学,电子信息学院,陕西,西安,710048;南方医科大学,生物医学工程学院,广东,广州,510515【正文语种】中文【中图分类】TP335在大多数测试与控制系统中,都不可避免地会用到各种各样的仪表.数字式仪表精度高、易读,部分指针式仪表已经被其所替代.但是当被测量数值快速变化或来回波动时,数字式仪表的示值会相应的快速变化而不易读数.而且,如果控制显示时间间隔,就会忽略期间的变化细节.在这一点上,指针式仪表占有明显优势,它可以直观地反应出测量值的变化范围,且具有结构简单,安装维护方便,不受磁场干扰,可靠性高,价格便宜等优点.因此,指针式仪表仍发挥着不可替代的作用[1].为了使指针式仪表实现自动判读并转换成数字信号,输入计算机,王博等[2]利用指针图像的先验特征,构造了基于空间相关和灰度相关的邻域平滑算子,运用阈值减影算法,实现了指针的检出.任光龙[3]基于传统熵最大法,提出了一种改进算法,以实现指针式仪表的快速分割.罗大成等[4]针对表盘面与镜头面不平行的问题,设计了一种景深校平函数,解决了指针误判问题.本文就WXC10型电流测量仪表,提出了一种基于Hough变换并通过转换偏转角度的基线位置确定指针度数的检定方法,以提高检定效率和精度.采用减影原理实现指针定位及回转中心的确定.对同一表盘指针处于不同位置的两幅图像的像素灰度值对应相减,由于除指针外两幅图像的背景部分像素的灰度值基本相同,因此,相减后除指针处外,其他像素的灰度值接近于零而指针处值为正或负.根据相减后图像的直方图,选择一个合适的阈值,调整图像的对比度,从而使图像指针得以检出.理想情况下,只有两幅原始图像指针处的像素变白,然而,由于干扰的影响,会出现个别孤立的白色像素点[5].原始图像如图1所示,检出的指针图像如图2所示.1.2.1 使用Hough变换做峰值检测使用Hough变换做线检测和链接的第一步是峰值检测.Hough变换做峰值检测后的图像如图3所示.由于Hough变换的峰值一般都位于多个Hough变换单元中,其解决方法为(1)找到包含有最大值的Hough 变换单元并记下它的位置.(2)把第一步中找到的最大值点的邻域中的Hough变换单元设为零.(3)重复该步骤,直到找到需要的峰值数时为止,或者达到一个指定的阈值时为止[6].1.2.2 使用Hough变换做线检测和链接直线检测的具体算法为利用Hough变换将原始图像中给定直线上的所有点都集中到变换空间的某个点形成峰值,再寻找峰点累加数的最大值即可确定出指针所在直线y=kx+b.知道了斜率k,结合事先选定的初始化仪表模板,就可以确定指针与零刻度线的偏转角度,从而计算出仪表的读数[7].Hough变换做线检测如图4所示.由于经过Hough变换后通过计算结果所示角度可知,表盘中指针回转基线处于中轴线处,且角度值是基线以左为负值而基线以右为正值.为了方便计算,使基线由竖直方向转换到水平方向,做了如下变换:即判断角度数值与0的大小.若角度数值小于零即a≤0,则保留原数值使得ai=a;若角度数值大于零即a>0,则用原数值减去180使得ai=a-180.以电流表表盘为例,以表盘圆心为原点建立直角坐标系.指针表量程为0~100μA,指针与x轴的夹角为θ( -135°≤θ≤ -45°),设所求的指针读数为x,则x/100=( -45 -θ)/90,而θ=ar ctank,所以有x=( -45-θ)/0.9.这样即可计算出仪表指针示数.表1为结果统计表,将人眼观测值和计算机读取的理论值进行了比较.图5观测值与计算值折线图中,实线表示观测值,虚线表示理论计算值.由表1观测值与计算值的比较结果以及图5观测值与计算值折线图可以得出,图5(a)中肉眼观测值分别为6,19,22,理论计算值分别为 7.222,19.444,22.222;图 5(b)中肉眼观测值分别为 98,100,100,理论计算值分别为 98.333,100,100;图5(c)中肉眼观测值分别为0,60,50,理论计算值分别为0,62.222,50.经过计算机识别得出的理论值可以精确到小数点后3位,而通过人眼得出的实际观测值只能估读到整数位.由此可见,运用数字图像处理技术进行指针式仪表的自动判读、具有精度高、速度快等特点.而人眼读数不仅受检测人员的操作经验、操作习惯和精神状态等其他主观因素的影响,而且还存在着劳动强度大、生产效率低、检测误差大、可靠性差等问题.此类误差的误差值可能很大,且无一定的规律.经大量试验数据得出此方法的正确识别率为95.98%本文以数字图像处理理论为基础,根据WXC10型电流测试仪表表盘刻度均匀分布的这一特点,利用Hough变换寻找峰值点累加数的最大值并确定出指针所在直线y=kx+b.通过表盘中指针回转基线的转换,结合选定的初始化仪表模板,确定出指针与零刻度线的偏转角度,从而计算出仪表的读数.Key words:subtraction radiography;Hough transform;baseline【相关文献】[1]赵艳琴,杨耀权,田沛.基于计算机视觉技术的指针式仪表示值的自动判读方法研究[J].电力情报.2001(3):39-42.[2]王博,秦岭松.基于计算机视觉的指针式仪表自动检测系统[J].计算机工程,2005,31(11):19-21.[3]任光龙.指针式仪表图像的快速分割法研究[J].计算机工程与设计,2005,26(3):790-792. [4]罗大成,王仕成,曾洪贵,等.指针式仪表识别系统的设计[J].激光与红外,2007,37(4):377-380.[5]杨耀权,赵艳琴,何晓燕,等.基于计算机视觉技术的指针式仪表自动检定方法[J].仪器与仪表学报,2001,22(3):233-234.[6]李凯南.基于Hough变换的指针式仪表的自动判读[J].现代电子技术,2006(14):18-20. [7]GONZALEZ R C.数字图像处理(MATLAB版)[M].北京:电子工业出版社,2007:296-302. [8]马玉珍,胡亮,方志强,等.计算机视觉检测技术的发展及应用研究[J].济南大学学报:自然科学版,2004,18(3):222-227.[9]陈杰来,尤丽华,张秋菊.数字图像处理技术在指针式仪表读数系统中的应用[J].江南大学学报:自然科学版,2005,4(6):611-614.[10]CORREA F Alegria,CRUZ A Serra.Automatic calibration of analog and digital measuring instruments using computer vision[J].IEEE Tran Instrum Meas,2000,49(1):94-99.[11]CORREA Alegria F,CRUZ Serra puter vision applied to the automatic calibration of measuring instruments[J].Measurement,2000,28(11):185-195. Abstract:Due to the problem of the analog meter signal can not be converted into digital signal input into computer,and the low efficiency of the human eye for the analog meter reading,a method was developed based on the Hough transform for pointer instrument identification.The gauge board image was gained from CCD and transformed into digital signal,extracting two pointers by adjusting the image resolution with Image Subtraction.By using Hough transformation to peak detection,line detection and link,with transferring the position of the baseline,the date of point instrument has been identified.The higher precision of the operator has been proved by the experiment.And the maximum uncertainty of the pointer's position in the analog instruments is less than the discrimination of the human eye.。
第23卷第2期重庆科技学院学报(自然科学版)2021年4月工业指针仪表智能识别系统设计唐霞苏盈盈罗妤王艳玲(重庆科技学院电气工程学院,重庆401331)摘要!针对圆形表盘指针仪表需经人工判读、较读数不精确,一套指针智能识别系统。
该用Faster-RCNN法对盘定位,盘,并对度化、Y-Means二值化处理;采用拟直线拟合方法确定指针,采用度法实现读数识别。
实r ,该的读数识别准确率不低于97.87%,可工业应用的精确度。
关键词:指针;Faster-RCNN;定;智能识别中图分类号:TP391文献标识码:A指针式仪表有结构简单、使用维修方便、价格低优点,在工业应用普遍。
,大的指针未实现智能化,仍需人工检定读数,读数误差较大。
研究将面向工业指针智能识别系,高针定位的准确性和实效性,工业需o思:首,Faster-RCNN*1+法对盘定位;然后,采用度化、Y-Mons二值化方法对的预处理;最后,指针定位用虚拟直线拟合的方法。
1仪表定位与读数智能识别系统针对工业用圆形盘针一套智能识别系统,括二大部分:定、指针确定、读数识别。
整个识别系统的流程1o 1.1仪表定位定,采用度学习中的Faster -RCNN方法,可实现在复杂背景下的精确定位o 其作用是,将拍的工业现场去,然后自测盘的位置,定盘的区域o,此区域4数,即绕的文章编号:1673-1980(2021)02-0087-04轴坐标,以及框的宽、高。
通过Faster-RCNN 方法得到这4数的网(见图2)o图1仪表智能识别系统流程图网,首,针到Faster-RCNN网,统一的边收稿日期:2020-10-13基金项目:重庆市技术创新与应用示范项目“深度学习框架下面向氮氧化物减排的垃圾焚烧状态在线监控系统设计”(CSTC2018JSCX-MSYBX0023);重庆市自然科学基金项目“非平行平面下融合表面微分几何复杂场景三体智能视觉研究及应用”(CSTC2018JCYJAX0239);重庆市研究沿探索专项“面向化发电的二噁排放复合方法”(CSTC2019JCYJ-MSXM0220);重庆科技学院硕士研究生创 划项目“面向工业的通用指针智能识别”(YKJCX1920410)作者简介:(1994-),女,在读硕士研究生,研究方向为图像处理。
巡检机器人中的指针式仪表读数识别系统摘要:巡检机器人能自动识别仪表设备的状态,先准确定位图像中的仪表设备,在此基础上,实现了仪表读数的自动识别。
关键词:巡检机器人;仪表读数识别;指针提取巡检机器人主要在户外工作,仪器识别算法需适用于各种不同的光照和天气情况,基于此,本文提出了一种迭代最大类间方法,解决了由光照或镜面反射引起的仪器图像过亮或过暗时指针提取问题;提出基于Hough变换的指针角度计算方法,推导了指针角度与仪表读数间的函数关系,实现了指针仪表读数的自动识别。
一、仪表识别算法概述变电站的仪表多数安置在室外,巡检机器人采集的仪表图像通常受到环境的影响。
现有的识别算法为,利用仪表表盘的形状特征,通过模板匹配或椭圆拟合确定仪表表盘在图像中的基本位置及区域范围。
其算法虽具备一定实时性和鲁棒性,但并不适用于巡检机器人采集到的变电站仪表图像。
这是因变电站设备结构复杂,在机器人采集到的图像中,背景紊乱,并不仅包含仪表区域,还同时囊括了其它设备。
在指针识别方面,通常在获取仪表表盘的子图像后,再使用多种的图像处理方法提取仪表指针的位置及指向方向。
另外,智能机器人能自动实现对仪表设备的状态识别,必须进行仪表设备在图像中的准确定位,在这基础上,实现仪表读数的自动识别。
二、指针式仪表读数识别1、指针区域提取。
在仪器图像采集过程中,由于受仪器玻璃的光照条件或镜面反射的影响,很难提取仪器指针等特征信息,从而影响仪器的读数识别。
因此,在提取指针区域前,需要去除噪声,增强高通图像。
为后续指针中心线的精确提取提供清晰的图像,从而提高仪器识别的精度。
1)表盘图像去噪。
由于仪器图像在采集过程中会受到噪声的干扰,可采用图像平滑的方法来降低噪声对仪器图像质量的影响。
如果平滑窗口太大或太小,仪器图像的细节将变得模糊或边界轮廓将被破坏。
本文采用5*5方形窗口的中值滤波去除图像噪声,不仅达到了去噪的目的,而且保持了图像的细节信息。
2)高通增强。
指针式仪表自动读数系统国外研究现状指针式仪表自动读数系统国外研究现状引言:指针式仪表是一种常见的测量工具,用于测量各种物理量,如电流、电压、温度等。
传统上,人们需要手动读取指针上的数值,这不仅费时费力,还容易出错。
为了提高测量的准确性和效率,许多国外研究机构和公司已经开展了关于指针式仪表自动读数系统的研究。
一、基于图像处理的自动读数系统1.1 计算机视觉技术在自动读数系统中的应用计算机视觉技术是指通过计算机对图像进行处理和分析来获取有用信息的一种技术。
在指针式仪表自动读数系统中,计算机视觉技术可以用于识别和提取指针位置以及读取数字刻度值。
1.2 图像处理算法在自动读数系统中的应用图像处理算法包括边缘检测、二值化、轮廓提取等方法。
这些算法可以帮助将原始图像转换为数字化数据,并提供给计算机进行进一步分析和处理。
二、基于机器学习的自动读数系统2.1 机器学习算法在自动读数系统中的应用机器学习是一种通过训练模型来自动识别和分类数据的方法。
在指针式仪表自动读数系统中,机器学习算法可以通过对大量样本数据进行训练,从而实现对指针位置和数字刻度值的自动识别和读取。
2.2 支持向量机(SVM)算法在自动读数系统中的应用支持向量机是一种常用的分类算法,它通过构建一个最优超平面来实现对数据的分类。
在指针式仪表自动读数系统中,SVM算法可以用于将图像中的指针位置进行分类,并进一步提取数字刻度值。
三、基于深度学习的自动读数系统3.1 深度学习算法在自动读数系统中的应用深度学习是一种通过神经网络模型进行特征提取和模式识别的方法。
在指针式仪表自动读数系统中,深度学习算法可以通过训练神经网络模型来实现对指针位置和数字刻度值的自动识别和读取。
3.2 卷积神经网络(CNN)算法在自动读数系统中的应用卷积神经网络是一种常用的深度学习算法,它通过卷积层、池化层和全连接层等组件来实现对图像数据的处理和分类。
在指针式仪表自动读数系统中,CNN算法可以用于提取图像中的指针位置和数字刻度值。
多类指针式仪表识别读数算法研究随着科技的不断发展,仪表识别读数算法在工业生产和日常生活中应用越来越广泛。
在实际应用中,不同的指针式仪表可能具有不同的读数方式,这就需要对多种类指针式仪表进行识别并自动读数。
本文提出了一种多类指针式仪表识别读数算法,以期提高算法的准确性和可靠性。
多类指针式仪表识别读数算法主要包含三个关键步骤:预处理、特征提取和分类识别。
首先对输入的图像进行预处理,包括灰度化、二值化和去噪等操作,以改善图像质量并减小无关信息的影响;然后对预处理后的图像进行特征提取,提取出与指针位置和读数相关的特征;最后将提取出的特征输入到分类器中进行分类识别,从而得到相应的读数。
预处理的目的是将输入的图像转换为灰度图像,去除无关信息,并增强与读数相关的特征。
具体来说,预处理操作包括以下步骤:灰度化:将输入的彩色图像转换为灰度图像,以减少计算量和提高处理速度。
二值化:将灰度图像转换为二值图像,以便于后续的特征提取和处理。
去噪:去除图像中的噪声和干扰,以减少对后续特征提取和分类识别的影响。
特征提取的目的是从预处理后的图像中提取出与指针位置和读数相关的特征。
具体来说,特征提取操作包括以下步骤:指针位置检测:通过检测图像中的边缘、角点等特征,确定指针在图像中的位置。
指针中心点检测:在检测到指针位置的基础上,进一步检测指针的中心点位置,这可以通过计算指针轮廓的质心或通过多个样本点的拟合得到。
读数区域确定:根据指针中心点的位置,确定读数区域的范围,并通过计算确定读数区域的中心点位置。
数字识别:最后将读数区域中的数字进行识别和提取,这可以通过模板匹配或深度学习模型进行实现。
分类识别的目的是将提取出的特征输入到分类器中,从而得到相应的读数。
具体来说,分类识别操作包括以下步骤:训练分类器:选择适当的分类器并对其进行训练,以得到较好的分类效果。
特征选择:从预处理后的图像中提取出与读数相关的特征,并选择合适的特征输入到分类器中进行分类。
指针式仪表数据智能采集系统设计摘要系统采用ADSPBF533+FPGA EP1C6T144C8架构,可实现图像采集、指针仪表识别与读数、数据传输等功能。
DSP通过对采集到的图像进行灰度变换、边沿检测以及Hough变换等处理后,实现对指针式仪表表盘的识别、指针定位和读数计算,以及指针读数的存储和传输。
系统可通过串口实现组网测量与数据传输。
FPGA接收DSP的指令,实现对COMS摄像头采集控制、键盘扫描以及各器件的片选信号产生等功能。
利用计算机SQL Server数据库技术编写上位机程序,可对测量数据进行管理和备份。
关键词DSP技术;Hough变换;SQL Serve;数据采集;ADSP-BF533 指针式仪表因具有结构简单、维护方便、不受电磁场干扰、可靠性高、价格便宜等优点,被广泛应用于科学实验和生产中。
仪表检测部门和仪表观测单位在对仪表进行观测时,其读数通常由人工完成。
由于人员视觉误差引起读数误差,且读数速度较慢、劳动强度大、观测周期长、工作效率低、易造成读数精度低、可靠性差、重复率高等问题。
同时,指针式仪表长期使用后,由于表面污损也给人工读数带来了困难。
因此,如何实现指针式仪表的自动判读,提高观测效率和观测精度,就成为需要解决的问题。
随着数字信号处理和数字图像处理技术的不断发展,应用这两种技术设计指针式仪表智能识别的方法受到人们关注,本文采用DSP技术,基于Hough变换的思想,开发了一套指针式仪表数据智能采集系统,实践证明该系统具有读数效率高、读数准确、可靠性高等优点。
1 研究现状20世纪60年代后,随着数字图像处理、模式识别、计算机技术和人工智能理论的不断发展,机器视觉技术取得了较大进步,在许多领域获得了广泛应用。
所谓机器视觉技术,主要用计算机模拟人的视觉功能,从客观事物的图像中提取信息,进行处理并加以理解,最终用于实际检测、测量和控制。
自动化生产过程中,机器视觉系统已广泛应用于工况监视、成品检验和质量控制等领域。