直流激励时霍尔式传感器位移特性实验
- 格式:docx
- 大小:12.18 KB
- 文档页数:3

直流激励时霍尔式传感器位移特性实验一、实验目的:了解霍尔式传感器原理与应用。
二、基本原理:根据霍尔效应,霍尔电势U H=K H IB,当霍尔元件处在梯度磁场中运动时,它的电势会发生变化,利用这一性质可以进行位移测量。
三、需用器件与单元:主机箱、霍尔传感器实验模板、霍尔传感器、测微头。
四、实验步骤:附:测微头的组成与使用测微头组成和读数如图3—1测微头读数图图3—1测位头组成与读数测微头组成:测微头由不可动部分安装套、轴套和可动部分测杆、微分筒、微调钮组成。
测微头读数与使用:测微头的安装套便于在支架座上固定安装,轴套上的主尺有两排刻度线,标有数字的是整毫米刻线(1mm/格),另一排是半毫米刻线(0.5mm/格);微分筒前部圆周表面上刻有50等分的刻线(0.01mm/格)。
用手旋转微分筒或微调钮时,测杆就沿轴线方向进退。
微分筒每转过1格,测杆沿轴方向移动微小位移0.01毫米,这也叫测微头的分度值。
测微头的读数方法是先读轴套主尺上露出的刻度数值,注意半毫米刻线;再读与主尺横线对准微分筒上的数值、可以估读1/10分度,如图3—1甲读数为3.678mm,不是3.178mm;遇到微分筒边缘前端与主尺上某条刻线重合时,应看微分筒的示值是否过零,如图3—1乙已过零则读2.514mm;如图3—1丙未过零,则不应读为2mm,读数应为1.980mm。
测微头使用:测微头在实验中是用来产生位移并指示出位移量的工具。
一般测微头在使用前,首先转动微分筒到10mm处(为了保留测杆轴向前、后位移的余量),再将测微头轴套上的主尺横线面向自己安装到专用支架座上,移动测微头的安装套(测微头整体移动)使测杆与被测体连接并使被测体处于合适位置(视具体实验而定)时再拧紧支架座上的紧固螺钉。
当转动测微头的微分筒时,被测体就会随测杆而位移。
1、霍尔传感器和测微头的安装、使用参阅实验九。
按图3-2示意图接线(实验模板的输出VO1接主机箱电压表的Vin),将主机箱上的电压表量程(显示选择)开关打到2v档。

实验四 霍尔式传感器的静态位移特性—直流激励一、实验目的了解霍尔式传感器的原理与特性。
二、所需单元及部件霍尔片、磁路系统、电桥、差动放大器、V /F 表、直流稳压电源,测微头、振动平台。
有关旋钮的初始位置:差动放大器增益旋钮打到最小,电压表置2V 档,直流稳压电源置2V 档,主、副电源关闭。
三、实验步骤:(1)了解霍尔式传感器的结构及实验仪上的安装位置,熟悉实验面板上霍尔片的符号,霍尔片安装在实验仪的振动圃盘上,两个半圆永久磁钢固定在实验仪的顶板上,二者组合成霍尔式传感器。
(2)开启主、副电源将差动放大器调零后,增益置接近最小,使得霍尔片在磁场中位移时V /F 表读数明显变化,关闭主,副电源,根据图1接线,W 1、r 为电桥单元的直流电桥平衡网络。
(3)装好测微头,调节测微头与振动台吸合并使霍尔片置于半圆磁钢上下正中位置。
(4)开启主、副电源,调整W1使电压表指示为零。
(5)上下旋动测微头,记下电压表读数,建议每隔0.2mm 读一个数,将读数填入下表:作出V —X 曲线,指出线性范围,求出灵敏度,关闭主、副电源。
可见,本实验测出的实际上是磁场情况,它的线性越好,位移测量的线性度也越好,图1 接线图它的变化越陡,位移测量的灵敏度也越大。
(6)实验完毕,关闭主、副电源,各旋钮置初始位置。
四、实验数据及处理V—X曲线从图中可以看出:线性范围电压为,位移为用最小二乘法求得拟合直线方程:y=0.1851x -2.209灵敏度:a=—0.1851线性范围:-0.114V——0.146V五、心得体会通过实验我们更深程度的了解了霍尔传感器的特性。
对霍尔传感器的对线性度,灵敏度等概念也有了进一步的理解。
实验中灵敏度也是比较大的,线性度也比较好,说明霍尔传感器所在的磁感应强度比较理想。
在多次测量数据后,通过matlab工具进行数据处理,得出的曲线更接近霍尔传感器的固有特性。
但是我们实际运用的时候只是用三分之一的量程到三分之二量程这一段。

实验三直流激励时接触式霍尔位移传感器特性实验一、实验目的了解霍尔位移传感器原理与应用。
二、基本原理根据霍尔效应,霍尔电势U H=K H IB,保持K H、I不变,若霍尔元件在梯度磁场B中运动,且B是线性均匀变化的,则霍尔电势U H也将线性均匀变化,这样就可以进行位移测量。
三、需用器件与单元霍尔传感器实验模板、线性霍尔位移传感器、直流电源±4V、电源±15V、测微头、数显单元。
四、实验步骤1、将霍尔传感器按图8-1 安装。
霍尔传感器与实验模板的连接按图8-2进行。
①、③为电源±4V(或单元5V),②、④为输出,R1与④之间可暂时不接。
图8-1 霍尔传感器安装示意图2、开启电源,接入±15V电源,将微测头旋至10mm处,左右移动微测头使霍尔片处在磁钢中间位置,即数显表电压指示最小,拧紧测量架顶部的固定螺钉,接入R1与④之间的连线,调节Rw2使数显表指示为零(数显表置2V档)。
图8-2 霍尔传感器与实验模板连线图3、旋转微测头,每转动0.5mm 记下数字电压表读数,并将读数填入表8-1中,将测微头回到10mm 处,反向旋转测微头,重复实验过程,填入表8-1中。
五、实验结果分析与处理1、 记录数显表数值如下:表3-1:霍尔传感器位移量与输出电压的关系:X (mm ) 7.07.5 8.0 7 9.0 9.5 10.0 10.5 11.0 11.5 12.0 12.5 13.0 V (mV ) 172 136 106 79 53 27 0 -28 -59 -92 -124 -151 -1652、由数据绘出霍尔传感器位移量与输出电压特性曲线如下图8-3 霍尔传感器位移量与输出电压特性曲线3、(1)计算系统灵敏度:在)10,0.7[∈X 区间,ΔV=(172-136)+(136-106)+•••+(27-0)/6=172/6=28.67mVΔX=0.5mm灵敏度S=ΔV/ΔX=57.34mV/mm在]0.13,0.10(∈X 区间,ΔV=(28-0)+(59-28)+。

霍尔位移传感器直流激励特性研究【摘要】本试验通过设计电路研究直流激励时霍尔位移传感器位移与电压值函数关系。
【关键词】霍尔位移传感器直流激励引言:利用传感器测试微小位移量有多种方法,本试验利用霍尔元件设计放大电路研究直流激励时霍尔式位移传感器其位移量与输出电压的定量关系,相比于同类实验其优点是电路设计简单,准确度较高,电路元器件价格较低。
1.试验原理根据霍尔效应,霍尔电势UH=KHIB,保持KH、I不变,若霍尔元件在梯度磁场B中运动,且B是线性均匀变化的,则霍尔电势UH也将线性均匀变化,而UH正比于位移量X,这样就可以利用UH的变化进行位移量X的测量。
设计实现以上原理的试验电路如下试验电路主要由主机箱(稳压电源、电压表)、传感器试验台(霍尔式位移传感器、振动盘、测微杆)、应变/平衡网络/温度模块、仪表放大器模块等组成。
2.试验数据3.试验结论将实验数据进行线性拟合其通过拟合出来的直线关系为U= 2.5025X + 0.0213.3.1 计算其灵敏度S [2]:灵敏度定义为测量元件的输出u相对于其输入x的变化率,故而全桥电路中金属箔应变片的灵敏度为:S=du/dx ,而由绘制的曲线可知S= 2.5025,近似为一个常数。
霍尔式位移传感器位移量与输出电压的特性曲线图3.2 计算其非线性误差δ[3]:由上面计算可得U=SX,U= 2.5025X+0.0213≈2.5*X 于是计算可得:U(0)=0V,U(1.0)=2.5V,U(2.0)=5.0V,U(3.0)=7.5V,U(4.0)=10.0V由此可得在各处的非线性误差为:E(0)=0.000V,E(1.0)=-0.01V,E(2.0)=0.01V,E(3.0)=0.06V,E(4.0)=0.03V由上面的非线性误差计算可以得出如下结论:在越远离平衡点(0.0mm)处的非线性误差越大,测量结果的非线性越明显,测量结果也就越不准确。
参考文献[1] 刘迎春,叶湘滨.现代新型传感器原理与应用.北京:1998年1月版;15-23.[2] 袁长坤.物理量测量.北京:2004年1月第一版;59-65和213-215.[3] 陈世涛.大学物理实验教程.四川:2011年2月第一版;4-19.。

实验十二霍尔式传感器的应用(一)直流激励特性测试一、实验目的了解霍尔式传感器的结构、工作原理,学会用霍尔传感器做静态位移测试。
二、实验原理霍尔式传感器是由两个环形磁钢组成梯度磁场和位于梯度磁场中的霍尔元件组成。
当霍尔元件通以恒定电流时,霍尔元件就有电势输出。
霍尔元件在梯度磁场中上、下移动时,输出的霍尔电势V取决于其在磁场中的位移量X,所以测得霍尔电势的大小便可获知霍尔元件的静位移。
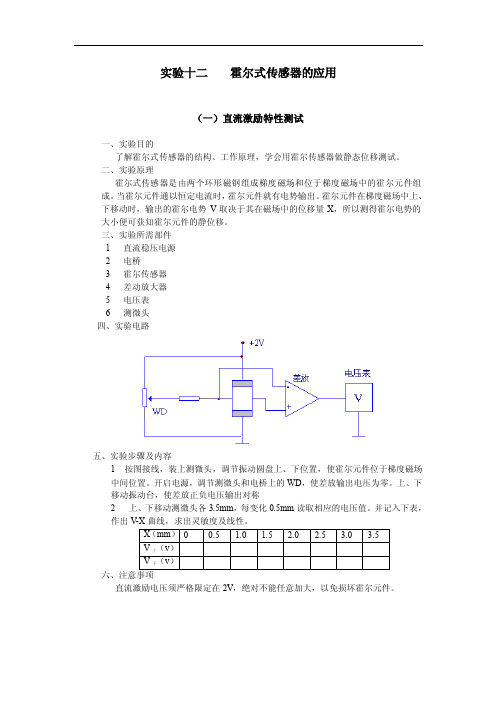
三、实验所需部件1直流稳压电源2电桥3霍尔传感器4差动放大器5电压表6测微头四、实验电路五、实验步骤及内容1 按图接线,装上测微头,调节振动圆盘上、下位置,使霍尔元件位于梯度磁场中间位置。
开启电源,调节测微头和电桥上的WD,使差放输出电压为零。
上、下移动振动台,使差放正负电压输出对称2 上、下移动测微头各3.5mm,每变化0.5mm读取相应的电压值。
并记入下表,作出V-X曲线,求出灵敏度及线性。
六、注意事项直流激励电压须严格限定在2V,绝对不能任意加大,以免损坏霍尔元件。
(二)霍尔传感器的应用——振幅测量和电子秤一、实验目的1 通过本实验了解霍尔传感器在振动测量中的作用。
2 说明线性霍尔传感器的实际应用。
二、实验所需部件1霍尔传感器2电桥3差动放大器4低通滤波器5直流稳压电源6示波器7电压表8砝码9振动圆盘三、实验步骤及内容(一)振幅测量1按上面的实验二十所示的电路连线,调节系统,使其输出为零。
2将低频振荡器接“激振I”,保持适当的振幅,用示波器观察差动放大器输出波形。
3进一步提高低频振荡器的振幅,用示波器观察差放输出波形,当波形出现顶部削顶时,说明霍尔元件已进入均匀磁场,霍尔电压已不再随振动的增加而线性增加。
(二)电子秤1 在上面电路不变的基础上,调节系统使输出电压为零,系统灵敏度尽量大。
2 以振动圆盘作为称重平台,逐步放上砝码,依次记下表头读数,填入下表,并做出V-W曲线。
线中求得其重量。
四、注意事项1 霍尔传感器在做称重时只能工作在梯度磁场中,所以砝码和被称重物都不应太重。
实验二霍尔式传感器的直流激励特性一、实验目的:了解霍尔式传感器的结构、工作原理,学会霍尔式传感器做静态位移测试。
二、实验原理:霍尔式传感器是由两个环形磁钢组成梯度磁场和位于梯度磁场中的霍尔元件组成。
当霍尔元件通以恒定电流时,霍尔元件就有电势输出。
霍尔元件在梯度磁场中上、下移动时,输出的霍尔电势V取决于其在磁场中的位移量X,所以测得霍尔电势的大小便可获知霍尔元件的静位移。
三、实验所需部件:直流稳压电源、电桥、霍尔传感器、差动放大器、电压表、测微头。
四、实验步骤:1.按图(17)接线,装上测微头,调节振动圆盘上、下位置,使霍尔元件位于梯度磁场中间位置。
开启电源,调解微测头和电桥W D,使输出差放为零。
上、下移动振动台,使差放正负电压输出对称。
2.上、下移动测微头各3.5mm,每变化0.5mm读取相应的电压值。
并记入下表,作出V-X曲线,求出灵敏度及线性.X(mm)(—)0 -0。
500 -1.000 —1。
500 —2。
000 -2。
500 —3.000 -3.500V 0.01 2。
80 5。
28 7.66 9。
93 10.21 10.22 10.22X(mm)(+)0。
500 1.000 1.500 2.000 2。
500 3.000 3。
500V —2.33 —4.82 —7。
19 —9.93 -10.80 -11。
13 —11.13五、注意事项:直流激励电压必须严格限定在±2V,绝对不能任意加大,以免损坏霍尔元件。
六、V—X曲线、求灵敏度及线性:线性:由图可以看出坐标(-2,10.10)到坐标(2,—10.00)为线性的线性方程为:V=kX+b ,又知b=0。
01,带入坐标得最终方程为:V=-5.025X+0。
01灵敏度:K=-5.025。
实验二霍尔式传感器的直流激励特性
一、实验目的:
了解霍尔式传感器的结构、工作原理,学会霍尔式传感器做静态位移测试。
二、实验原理:
霍尔式传感器是由两个环形磁钢组成梯度磁场和位于梯度磁场中的霍尔元件组成。
当霍尔元件通以恒定电流时,霍尔元件就有电势输出。
霍尔元件在梯度磁场中上、下移动时,输出的霍尔电势V取决于其在磁场中的位移量X,所以测得霍尔电势的大小便可获知霍尔元件的静位移。
三、实验所需部件:
直流稳压电源、电桥、霍尔传感器、差动放大器、电压表、测微头。
差放电压表
-2V
图⑴)
四、实验步骤:
1 •按图(17)接线,装上测微头,调节振动圆盘上、下位置,使霍尔元件位于梯度磁场中间位置。
开启电
源,调解微测头和电桥W D,使输出差放为零。
上、下移动振动台,使差放正负电压输出对称。
2 .上、下移动测微头各 3.5mm,每变化0.5mm读取相应的电压值。
并记入下表,作出V-X曲线,求出灵敏度及线性。
五、注意事项:
直流激励电压必须严格限定在土2V,绝对不能任意加大,以免损坏霍尔元件。
六、V-X曲线、求灵敏度及线性:
线性:由图可以看出坐标(-2,)到坐标(2,)为线性的线性方程为:V=kX+b ,又知b=,带入坐标得最终方程为:
V=+
灵敏度:K=。
实验 直流激励时霍尔传感器的位移特性实验传感器的种类繁多,传感器技术是一门分散型技术.又是一门知识密集性技术。
它涉及物理、化学、生物、材料、电子学等几乎所有的科学技术。
一、实验目的:1、掌握霍尔传感器工作原理与应用;2、通过静态位移量输入了解霍尔传感器工作特性。
二、实验仪器:霍尔传感器模块(THSRZ-1型)或(DH-CG2000型)、霍尔传感器、测微头、直流电源、数显电压表。
三、实验原理:霍尔传感器是根据霍尔效应制作的一种磁场传感器,霍尔效应是磁电效应的一种,这一现象是霍尔(A.H.Hall ,1855—1938)于1879年在研究金属的导电机构时发现的。
后来发现半导体、导电流体等也有这种效应,而半导体的霍尔效应比金属强得多,利用这现象制成的各种霍尔元件,广泛地应用于工业自动化技术、检测技术及信息处理等方面。
霍尔效应是研究半导体材料性能的基本方法。
通过霍尔效应实验测定的霍尔系数,能够判断半导体材料的导电类型、载流子浓度及载流子迁移率等重要参数。
1、霍耳元件置于磁感应强度为B 的磁场中,在垂直于磁场方向通以电流I ,则与这二者垂直的方向上将产生霍耳电势差UH 。
B I K U H ⋅⋅= (1)(1)式中K 为元件的霍耳灵敏度。
如果保持霍耳元件的电流I 不变,而使其在一个均匀梯度的磁场中移动时,则输出的霍耳电势差变化量为:Z dZdBI K U H ∆⋅⋅⋅=∆(2)(2)式中Z ∆为位移量,此式说明若dZ dB为常数时,H U ∆与Z ∆成正比。
为实现均匀梯度的磁场,可以如图1所示两块相同的磁铁(磁铁截面积及表面磁感应强度相同)相对放置,即N 极与N 极相对,两磁铁之间留一等间距间隙,霍耳元件平行于磁铁放在该间隙的中轴上。
间隙大小图 1要根据测量范围和测量灵敏度要求而定,间隙越小,磁场梯度就越大,灵敏度就越高。
磁铁截面要远大于霍耳元件,以尽可能的减小边缘效应影响,提高测量精确度。
若磁铁间隙内中心截面处的磁感应强度为零,霍耳元件处于该处时,输出的霍耳电势差应该为零。
直流激励时霍尔式传感器位移特性实验
一、实验目的:了解霍尔式传感器原理与应用。
二、基本原理:根据霍尔效应,霍尔电势U H=K H IB,当霍尔元件处在梯度磁场中运动时,它就可以进行位移
测量。
三、需用器件与单元:霍尔传感器实验模板、霍尔传感器、直流源土4V、土15V、测微头、数显单元。
四、实验步骤:
1 、将霍尔传感器按图5-2安装。
霍尔传感器与实验模板的连接按图5-3进行。
1、3为
电源土4V, 2、4为输出。
图5-2霍尔传感器安装示意图
2、开启电源,调节测微头使霍尔片在磁钢中间位置再调节R wi使数显表指示为零。
图5-3霍尔传感器位移直流激励实验接线图
3、旋转测微头向轴向方向推进,每转动0.2mm记下一个读数,直到读数近似不变,将读数填入表5-1。
作出V-X曲线,计算不同线性范围时的灵敏度和非线性误差。
用最小二乘法对实验数据进行处理,并绘出V-X曲线,程序如下:
t=[0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8];
y=[-0.966 -0.978 -0.984 -0.988 -0.993 -0.997 -1.001 -1.006 -1.010 -1.015];
[P,S] = polyfit(t,y,1)
t1=0:0.01:1.8;
yi=polyval(P,t1);
plot(t,y, 'k*' ,t1,yi, 'r')
xlabel( 'X(mm)');
ylabel( 'V(V)');
legend('测量数据点',‘最小二乘拟合线')
运行结果如下:
P =
-0.0248 -0.9715
S =
R: [2x2 double]
df: 8
normr: 0.0069
由结果知灵敏度为0.0248和非线性误差为0.69%
V-X曲线
结论:由上图知霍尔电压与推进距离为线性关系。
五、思考题:
1)本实验中霍尔元件位移的线性度实际上反映的是什么量的变化?
2)请思考解释本实验中的“信号获取电路”的原理及电路参数。
光纤传感器的位移特性实验
一、实验目的:
了解光纤位移传感器的工作原理和性能。
二、基本原理:
本实验采用的是导光型多模光纤,它由两束光纤组成Y型光纤,探头为半圆分布,一束光
纤端部与光源相接发射光束,另一束端部与光电转换器相接接收光束。
两光束混合后的端部是工作端亦即探头,它与被测体相距X,由光源发出的光通过光纤传到端部射出后再经被测体反射回来,由另一束光纤接收反射光信号再由光电转换器转换成电压量,而光电转换器转换的电压量大小与间距X有关,因此可用于测量位移。
三、需用器件与单元:
光纤传感器、光纤传感器实验模板、数显单元、测微头、直流源土15V反射面。
四、实验步骤:
1、根据图6-1安装光纤位移传感器,二束光纤插入实验板上光电变换座孔上。
其内部已和发光
管D及光电转换管T相接。
图6-1光纤传感器安装示意图
2、将光纤实验模板输出端V01与数显单元相连,见图6-2。
图6-2光纤传感器位移实验接线图
3、调节测微头,使探头与反射平板轻微接触。
4、实验模板接入土15V电源,合上主控箱电源开关,调R使数显表显示为零。
5、旋转测微头,被测体离开探头,每隔0.1mm读出数显表值,将其填入表9-1。
表6-1光纤位移传感器输出电压与位移数据
用最小二乘法对实验数据进行处理,程序为:
t=[0.51 0.8 0.835 1 1.1 1.2 1.3 1.4 1.5];
y=[0.207 0.325 0.35 0.39 0.44 0.475 0.518 0.537 0.56]; [P,S] = polyfit(t,y,1)
t1=0.5:01:1.5;
yi=polyval(P,t1);
plot(t,y, 'k*' ,t1,yi, 'r')
xlabel( 'X(mm)' );
ylabel( 'V(V)' );
legend( ' 测量数据点' , ' 最小二乘拟合线' ) 运行结果为:
P =
0.3607 0.0359
S =
R: [2x2 double]
df: 7
normr: 0.0307量程1mm寸灵敏度为3.3048和非线性误差为0.0307。
光纤位移传感器的位移特性
结论:由上图知光纤位移传感器输出电压与位移为线性关系。
五、思考题:
1 )光纤位移传感器测位移寸对被测体的表面有些什么要求?答:被测体表面必须足够光滑,能够形成镜面发射。
2)请思考解释本实验中的“信号获取电路”的原理及电路参数。
光纤传感器测速实验
一、实验目的:
了解光纤位移传感器用于测量转速的方法。
二、基本原理:
利用光纤位移传感器探头对旋转体被测物反射光的明显变化产生的电脉冲,经电路处理即可测量转速。
三、需用器件与单元:
光纤传感器、光纤传感器实验模板、数显单元测转速档、直流源土15V、转速调节2-24V,
转动源单元。
四、实验步骤:
1 、将光纤传感器按图4-5 装于传感器支架上,使光纤探头与电机转盘平台中反射点对准。
2、按图6-2,将光纤传感器实验模板输出V01与数显电压表V端相接,接上实验模板上土15V 电源,数显表的切换开关选择开关拨到2V档。
①用手转动圆盘,使探头避开反射面(暗电流),合上主控箱电源开关,调节R W使数显表显示接近零(>0)。
②再用手转动圆盘,使光纤探头对准反射点,调节升降支架高低,使数显表指示最大,重复①、②步骤,直至两者的压差值最大,再将V01 与转速/频率数显表F in 输入端相接,数显表的波段开关拨到转速档。
3、将转速调节2-24V,接入转动电源24V插孔上,使电机转动,逐渐加大转速源电压。
使电机转速盘加快,固定某一转速观察并记下数显表上读数n i。
注意:电机不可满量程24v供电。
4、固定转速电压不变,将选择开关拨到频率测量档,测量频率记下频率读数,根据转盘上的测速点数折算成转速值n2。