理论力学第七章
- 格式:pptx
- 大小:12.22 MB
- 文档页数:59

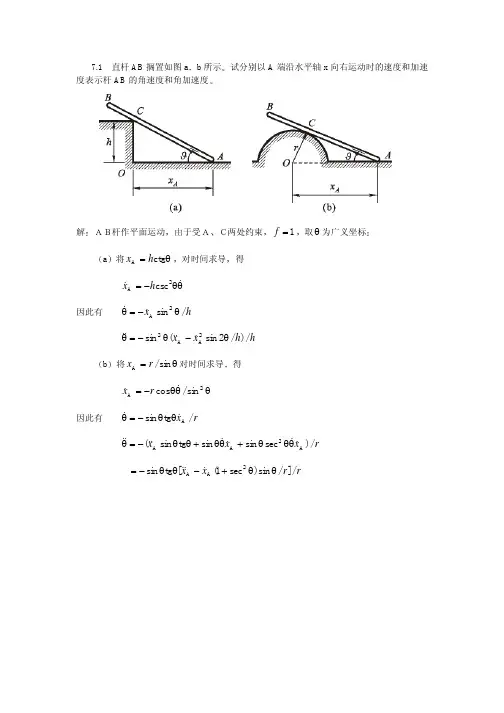
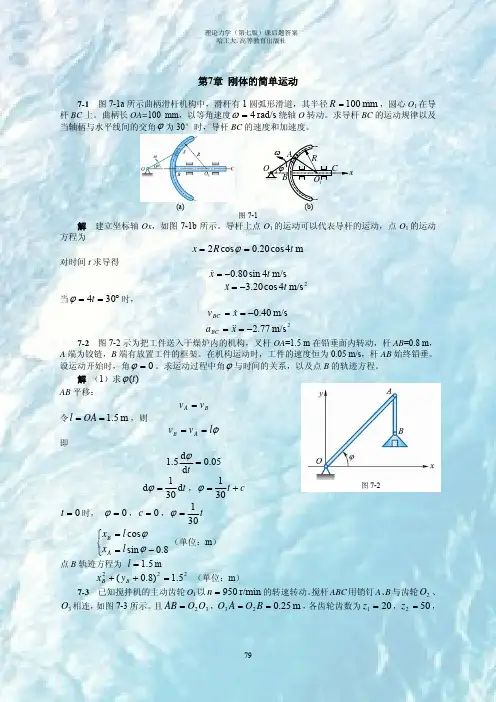
7.1 直杆AB 搁置如图a b 所示试分别以A 端沿水平轴x 向右运动时的速度和加速度表示杆AB 的角速度和角加速度解杆作平面运动由于受两处约束1=f 取θ为广义坐标a 将θ=ctg A h x 对时间求导得θθ−=&&2A csc h x因此有h x /sin 2A θ−=θ&&hh x x /)/2sin (sin 2A A 2θ−θ−=θ&&&&&b 将θ=sin /A r x 对时间求导得θθθ−=2A sin /cos &&r x因此有r x /tg sin A &&θθ−=θr x x x/)sec sin sin tg sin (A 2A A &&&&&&&&θθθ+θθ+θθ−=θr r x x/]/sin )sec 1([tg sin 2A A θθ+−θθ−=&&&7.2 试证明直杆AB 搁置如图a b 所示杆AB 运动时杆上点C 的速度沿杆AB其大小等于θcos A v解基点CA A C v v v +=a x ′0sin sinA CA A x C =θ+θ=−θ=′&&CA xv v v y ′θ=′cos A y C v v 证毕b x ′0sin sinA CA A x C =θ+θ=+θ=′&&CA x v v v y ′θ=′cos A y C v v 证毕7.3 滚压机构的滚子沿水平面作纯滚动如图示曲柄OA 长r 连杆AB 长l 滚子半径为R 若曲柄以匀角速度ω绕固定轴O 转动试求任意时刻θ=∠AOB 连杆AB和滚子的角速度解本机构自由度14233=×−×=f 除θ外取多余坐标ϕ两者间有约束方程ϕ=θsin sin l r 1矢量法基点BA A B v v v +=)(A r v ω=)sin()sin()sin(B 2A 2BA ϕ+θ=ϕ−=θ−ππv v v ϕθ=cos cos A BA v v ϕθω==ωcos cos BA AB l r l vϕϕ+θ=cos )sin(A B v v ϕϕ+θω==ωcos )sin(B B R r R v分析法将式1对时间求导得ϕθω=ϕθθ=ϕcos cos cos cos l r r &&对ϕ+θ=cos cos B l r x 对时间求导得ϕϕ+θω−=ϕϕ−θθ−=)sin(sin sin B r l r x&&&因此ϕϕ+θω=−=ωcos )sin(/B B R r R x&7.4 一放大机构中ABCD 为一平行四边形B 为OC 的中点D 为CE 的中点设图示位置点A 的速度如图示求点E 的速度解平行四边形机构在任意时有BC//ADAB//CD 因此1AD BC ωωω==2CD AB ωωω==A 基点ABB A v v v +=基点ECC E v v v +=Q OB OC 2=BACE 2=∴B11C 22v v =×=×=OB OC ωωAB22EC 22v v =×=×=BA CE ωω可导出AE 2v v =7.5 一自动卸货大卡车的升降机构如图示图中BFBE =l AC =在此瞬时活塞在处于水平的液压缸中的速度为v 求车厢转动的角速度解利用速度投影定理杆vv =o 60cosF vv 2F =v v v 2F E ==杆v v v ==o 60cosE D 因此lv AD v 2D ==ω7.6 画出图示机构中作平面运动的杆件在图示位置的速度瞬心7.7 图示拱桥上受到1F 和2F 两力作用若给出的三拱桥的支座C 若突然坍塌试求此瞬时GBJ 和ICJ 两部分的速度瞬心解GBI 构件瞬心为ICJ 构件瞬心在无穷远7.8 杆AB 可在作定轴转动的套筒O ′内滑动如图示其A 端与曲柄OA 铰接已知r O O OA =′=求杆的动瞬心轨迹和定瞬心轨迹解AB 杆作平面运动杆上与O 相重合之点速度O ′v 沿杆方向A v 垂直于OA 杆因此瞬心为C 不难看出C 点相对AB 杆和定系的位置可分别以),2(ϕr 和)2,(ϕr 表示则动定瞬心迹线分别是半径为r 2和r 的圆7.9 图示反平行四边形机构中a CD AB 2==c BD AC 2==c a >求杆BD的动瞬心轨迹和定瞬心轨迹解BD 杆的瞬心为AB 与CD 的交点P 容易证明三角形APC和DPB 全等因此瞬心P 点相对BD 杆和定系的位置均可用),(ϕρ表示在三角形APC 中有DPAP ==ρ 0sin )2(sin =ψρ−−ϕρa ca 2cos )2(cos =ψρ−+ϕρ上二式中消去ψ得222)2()cos 2()sin (ρ−=ϕρ−+ϕρa c 可导出如下椭圆方程]cos )/(1[]/)[(22ϕ−−=ρa c a c a 因此动定瞬心迹线均为椭圆7.11 三根连杆AB BC 和CD 用铰链相连组成一四连杆机构AD 可视作固定不动的连杆已知a BC AB ==a CD 2=杆AD 以匀角速度ω转动求图示两位置杆CD的角速度和角加速度解a 杆作瞬时平动0BC =ωBC v v =∴2/2/C CD ω==ωa v 基点ττ+=+CBn B n C C a a a a∴0C =τa 0CD =αb 杆速度瞬心在点0=C v ∴ω==ωa v /B BC 0CD =ω基点nCBCB n B C a a a a ++=ττx ′n CBn B c cos a a a −−=θτQ 4/7sin cos =ϕ=θaa 2n B ω=aa 2n CB ω=∴7/82C a a ω−=τ7/742/2C CD ω−==ατa a7.12 平面机构如图示已知CD//EG B 为杆DG 的中点O A B C D E G 均为铰链cm 20==EG CD cm 50=DG cm 40=OA 在图示位置杆CD 铅垂OA//CD cm/s20A =v 水平向左B 的加速度沿水平方向的分量2Bx cm/s10=a3.0tan =θ试用平面运动基点法求此瞬时 1杆CD 和杆OA 的角速度2B 的加速度沿铅垂方向的分量3杆OA 的角加速度解杆做瞬时平动AB =ωBA v v = rad/s 5.0/A OA ==ωOA v22OA nA cm/s10=ω=OA a 某点ττ++=+ABBy Bx A n A a a a a ax ′θ−θ=θ−θτsin cos cos sinBy Bx A nA a a a a 2By n A Bx A cm/s 1tg )(−=θ++−=τa a a a 2A OA rad/s )40/1(/−==ατOA a7.13 滚压机构的滚子沿水平面作纯滚动如图示曲柄OA 长r 连杆AB 长l 滚子半径为R 若曲柄以匀角速度ω绕固定轴O 转动计算连杆AB 和滚子的角加速度解矢量法基点nBABA n A B a a a a ++=τyϕ+ϕ−θ−=τsin cos sin 0n BA BA n A a a aϕω−ϕ=ϕθω−ϕϕ=τtg )(cos /)sin sin (2222BA &&l r l a x ′nBAn A B )cos(cos a a a +ϕ+θ=ϕϕϕ+ϕ+θω=cos /])cos([22B &l r a ∴ϕω−ϕ==ατtg )(/22BA AB &l a ϕϕ+ϕ+θω==αcos /])cos([/22B B R l r R a &分析法ϕω−ϕ=ϕϕθω+ϕθω−=ϕ=αtg )(cos /sin cos cos /sin 2222AB &&&l r l r ϕϕϕϕ+θω+ϕϕ+ωϕ+θω=ω=α2B B cos /sin )sin(cos /))(cos(R r R r &&&ϕϕ+ϕ+θω=cos /])cos([22R l r &7.14 半径为r 的圆盘在水平面上作直线纯滚子如图示其中心O 的速度O v 常量杆AB 长l 其B 端用铰链与圆盘边缘相连接求在水平面上运动的A 端的速度和加速度以转角ϕ表示之解本机构自由度1=f θ和ϕ有约束方程)cos 1(sin ϕ−=θr l )1(矢量法圆盘的瞬心为点杆的瞬心为点因此)2/sin(2)/(O O B ϕ==v BP r v v θϕϕ==ωcos /)2/cos()2/sin(2/O l v CB v B AB θϕ=cos /sin O l v ]2cos /)2/sin()[cos /sin (O ϕϕ+θθϕ=ω=l l v CA v AB A )2/sin()2/sin(2)cos /(O ϕϕ+θθ=v ]cos /)cos(1[O θϕ+θ−=v 基点nBO BO O B a a a a ++=τO =a τBOa基点nAB ABB A a a a a ++=τx ′nABB A )2cos(cos a a a +θ−ϕ−π=θ∴θϕ+θϕ+θ=3222A cos sin cos )sin(l v r v a O O 分析法将式1对时间求导得θϕ=θcos /sin Ol v &因为θ−ϕ−=cos sin O A l r x x 对时间求导得)cos /sin (sin cos O O O A A θϕθ+ϕ−==l v l v v xv &]cos /)cos(1[O θϕ+θ−=v θθθϕ+θ−θϕ+θϕ+θ==2O A A cos /sin )cos(cos /))(sin(&&&&v va θϕ+θϕ+θ=322O 2O cos sin cos )sin(l v r v7.15 半径为10cm 的轮B 由曲柄OA 和连杆AB 带动在半径为40cm 的固定轮上作纯滚动设OA 长10cm AB 长40cm OA 匀角速转动角速度rad/s 10=ω求在图示位置轮B 滚动的角速度和角加速度解矢量法杆作瞬时平动AB =ωω==r v v A Brad/s10/B B =ω==ωr v cmr 10=基点ττ+=+BA n A n B Ba a a ax ′α−=β−βτsin sin cos nA nB B a a a ∴75/154tg )5/(2222B ω−=βω−ω−=τr r r r a 2rad/s 7.2075/154/2B B −=ω−==ατr a 分析法设的坐标分别为A x A y BxB y 此瞬时0A =x r y =A rx 15B =0B =y 则有22A B 2A B )4()()(r y y x x =−+−将上式求导得0))(())((A B A B A B A B =−−+−−y y y y x xx x &&&&0))(()())(()(A B A B 2A B A B A B 2A B =−−+−+−−+−y y y y y y x x x x x x &&&&&&&&&&&&将0B A ==y y&&2A ω−=r y&&r x y 5/2B B &&&−=及0A =x&&等代入上二式得ω−==r x xB A &&75/1542B ω=r x&&因此导出rad/s 10/B B =−=ωr x &2B B rad/s 7.20/−=−=αr x&&7.16 半径为r 的两轮用长l 杆A O 2相连如图示前轮1O 匀速滚动轮心的速度为v求在图示位置后轮2O 滚动的角加速度解矢量法1O 轮纯滚动vv v 221O A ==A O 2杆瞬时平动v v v 2A O 2==0A O 2=ω2O 轮纯滚动rv r v /2/22O O ==ω基点1O n AOAOO A1a a a a ++=τ1O =a 0AO =τa2O 基点n AO A O AO 221a a a a ++=τx ′ϕ−=ϕsin cosA O2a a rv a /tg 2O 2ϕ−=222O O //22r l r v r a −−==α分析法A O 2杆长l ,故22O A 2O A )()(22l y y x x =−+−则有0))(())((2222O A O A O A O A =−−+−−y y y y x xx x &&&&0))(()())(()(222222O A O A 2O A O A O A 2O A =−−+−+−−+−y y y y y y x x x x x x &&&&&&&&&&&&将0B A ==y y&&r v y/2A −=&&02O =y&&0A =x&&代入上二式得v x x2A O2==&&222O /2r l v x−−=&&于是导出r v r x /2/22O O ==ω&222O O //22r l r v r x −−==α&&7.17 圆柱体C 在固定的半圆柱D 上纯滚动一杆AB 一端与圆柱体中心铰接另一端与滑块A 铰接在图示瞬时滑块A 的速度m/s3=v 加速度2m/s2=a 求此瞬时圆柱体C 的角速度和角加速度解B基点ABAA B v v v +=o o o 105sin 15sin 60sin ABA B v v v ==m/s 70.2B =v m/s80.0BA =v∴rad/s8.15.1/B C ==ωvrad/s1.08/BA AB ==ωv nBABA AnBBa a a a a ++=+ττ5.4/2B v 82AB ⋅ωx ′n BA A n B B 30cos 15sin 15cos a a a a +=−τo o o2B m/s 31.2=τa 2B C rad/s 54.15.1/==ατa7.18 一杆AB 一端与小齿轮中心A 铰接另一端与圆盘D 的边缘B 点铰接如图示若圆盘D 以匀角速度ω转动杆AB 长m5.0求此瞬时小齿轮在齿圈上滚动的角速度和角加速度解杆的速度瞬心即齿圈的圆心因此ω=−=ω)3/4()25.3/(B AB vω=ω=)3/16(4B A v ω==ω3.51/A A &v基点nABABnBnA Aa a a a a ++=+ττ4/2A v 22⋅ωABAB ωx ′n AB n B n A A45cos cos sin a a a a +=β+β−τo 在三角形中AB)45sin(5.1sin 445sin β+=β=o o 解得o377.15=β)m 10(92.41−=AB 于是有2A 45.12ω−=τa 2A45.121/ω−==ατa A7.19 直杆CD 在C 点处与齿轮B 铰接在图示瞬时杆CD 的速度为0=v 加速度2mm/s 600=a 求此瞬时齿条A 的加速度解(1)令齿轮轮心O, 以C 为基点有τOC C O a a a += 0Ox =a 0Oy =a 所以0O =a (2)τPOP a a =2CP m/s 8.0==OP OCa a 齿条加速度 )/(8.02P s m a a ==7.20 上题中若速度改为mm/s75=v 加速度不变求齿条A 的加速度解轮心O 为速度瞬心rad/s 1C==OCv ωnOCOC C O a a a a ++=τ2C rad/s 875600/===OC a αnPOPO O P a a a a ++=τ2O τPO Px m/s 725.0075.08.0=−=−=a a a 所以2Px A m/s725.0==a a7.21 图示动齿轮O ′由曲柄O O ′带动在定齿轮O 上滚动已知曲柄的角速度为ω计算齿轮相对曲柄的角速度解方法一ω−=′)(21O r r v ω−==ω′)1/(/212O r r r v a齿轮O ′动系O O ′杆er a ωωω+=ω=ω−−ω=ω)/()(21a r r r 方法二齿轮O ′瞬心位于O ′连线外侧因此因此r ω必与ω=ωe 反向由e r /ωω=′O C CO 得ω=ω)/(21r r r7.22 图示行星齿轮系中轮I 固定轮II 由曲柄AB 带动轮III 又由轮II 带动已知曲柄的角速度为ω角加速度为零求轮III 相对曲柄AB 的角速度和角加速度设轮II 轮III 半径相同解设轮 半径为r 则rAB 2=ω=r v B 2ω==ω2/B 2r vω=ω=r r v 422P ω==ω4/P 3r v轮 动系杆er a ωωω+=∴ω=ω−ω=ω34r 03=ω=ω=α&&r r7.23 图示传速器由以下齿轮组成半径cm 401=r 的定齿轮半径各为cm 202=r 和cm 303=r 的相连的行星齿轮以及半径cm 904=r 的内啮合齿轮主动轴转速min /r 18001=n 带动行星齿轮在定齿轮上滚动并通过内啮合齿轮使从动轴转动试求从动轴每分钟的转速2n 解A 点作圆周运动a21A )(n r r v +=齿轮2在定齿轮1上纯滚动r v A /2=ω齿轮3与齿轮2有相同角速度23ω=ω基点BAA B v v v +=b 4n r 33ωr a232133A B )/1)((n r r r r r v v ++=ω+=∴rpm3000/)/1)((/4a 23214b =++==r n r r r r r v n B rpm 转数分e r杆OA 作顺时针纯滚动圆盘半径为r 3r =OP 求圆盘中心B 的速度解方法一因r ω与e ω反向圆盘的瞬心在连线外侧由e r //ωω=CP CO 可得rCP =圆盘动系杆e r a ω+ω=ωω=ω3a∴ω=ω=r r v 232a B 方法二基点BPP B v v v +=Q ω=ω=r r v 33e P ω=ω=r r v 3a BP∴ω=+=r v v v 23)(2/12BP 2P B 方法三动系杆er a v v v +=Q ω=ω=r r v 4r r ω=ω=r r v 1010e e∴ω=β−+=r v v v v v 23)cos 2(2/1e r 2e 2r ae r杆OA 作顺时针纯滚动圆盘半径为r 3r =OP 试求圆盘与杆OA 的接触点P 的加速度解圆盘上动系杆kr n e e P a a a a a +++=τe r α323e r ω2rr ωQ 0=r v x ′2n e x P 3ω−=−=′r a ay ′222r e y P 13)4(3ω=ω+ω−=+=τ′r r r a a a7.27 图中直杆AB 表示齿条圆轮O 表示齿轮当齿条的一端运动时带动半径为cm 5的齿轮绕轴O 转动今设A 端以cm/s 30的速度向右匀速运动求图示位置齿条AB 及齿轮O 的角速度和角加速度解AB 杆瞬心为点rad/s3/AB ==ωPA v AABC ω=PC vrad/s3/AB C O =ω==ωCO v 矢量法圆盘动系杆ABr O ωωω+=rad/s6r =ωAB r O ααα+=ABO r α+α=α圆盘上动系杆ke r O a a a a ++=杆上O ′基点nOAOA A e a a a a ++=τ由于0O =a 0A =a 由以上二式得k n OA OA r =+++τa a a ar αr AB αOA 2AB ωOA r AB 2v ωrr ω=r v x ′060cos 30cos k n OA OA =−+−τa a a o o 2AB rad/s 39−=αy ′060sin 30sin n OA OA =−−τo o a a a r 2O rad/s 39=α分析法设ϕ为广义坐标)2/(ctg ϕ=r x A 将上式求导得2/)2/(csc 2ϕϕ−=&r v A可导出rad/s 3|/)2/(sin 2602A −=ϕ−=ϕ=ϕo &r v 260A rad/s 39|/sin =ϕϕ−=ϕ=ϕo &&&r v 因为为杆瞬心ϕ==cos /A A C v PA PC v v则有rad/s3|/cos /60A C O =ϕ==ω=ϕo r v r v 260A O rad/s 39|/sin =ϕϕ−=α=ϕo &r v7.28 一机构在图示位置时OB OA ⊥点C 位于AB 的中点已知rOA =r AB 4=求当杆OA 以匀角速度ω转动时杆CD 的速度和加速度解杆瞬时平动A C v v =′0AB =ω基点nBA BA n A B a a a a ++=τ0n BA =ay β+−=τcos 0BA n A a a 15/4/2BA AB ω==ατr a杆上动系杆e r a v v v +=15/CD ωr v = k e r a a a a a ++=0k =a杆上C ′基点nCA CA n A e a a a a ++=τ0n CA =a导出τ++=CAn A r a a a a a x ′τββCAn A a a a −=cos cos CD 15AB /r r r a 22CD 7cos /2ωαεω=−=7.29 套筒C 上装有一销轴可在半径为1m 的圆槽内滑动当滑块A 以匀速m/s 5.0=v 向右上方运动而杆DA 以匀角速度2rad/s =θ&转动时求图示瞬时套筒C 在杆AD 上滑动的速度和加速度图示位置o90=θ解动系杆e r a v v v += 1k e r n a a a a a a a ++=+τ 2杆C ′点基点CA A e v v v += 3nCA CA a e a a a a ++=τ 4由13得CA A r a v v v v ++=θ=&AC CA v m/s 8=a v m/s4r =v由24得kn CA r n a a a a a a a ++=+τ1/2a v 2θAC r2v θ&y oo o 30sin 30cos 30cos k n CA r n a a a a a −−−=−∴m/s6.5330tg 30cos /k n CA n r =−−=o o a a a a a7.30 图示一机构在某瞬时的位置此时ω=ωOA 0OA =αω=l v CD 0CD =a求杆AB 的角速度和角加速度解动系杆e r a v v v += 1k e r a a a a a ++=0a =a 2杆上P 点基点A P A e v v v +=3nPA PA na e a a a a ++=τ4由13得PAe r a v v v v ++=CD v OA ωl AB 2ωl x ′PAA a 45cos 45cos v v v +=−o o ω−=+ω−==ωl v l l v 2/)(2/CD OA PA AB y ′o o 45cos 45cos A r a v v v −=ω=l v 2r由24得0k nPA PA nA r =++++τa a a a a 2OA ωl AB 2αl 2AB 2ωl r AB 2v ω x ′045cosk PA nA =−+τa a a o 222PA AB 5.222/2/ω−=ω−ω−==ατl l l l a7.31 两个半径为cm 20=r 中心距离保持不变的圆盘在地面作纯滚动在其边缘B D 处铰接的连杆BD 上安装一滑块C 杆AC 一端与滑块铰接另一端与一圆盘的中心A 铰接若A 以cm/s 60A =v 匀速水平向左运动求图示位置杆AC 的角速度和滑块C 相对BD 的速度以及杆AC 的角加速度解矢量法圆盘rad/s3/A A ==ωrv 0/A A ==εra基点BAA B v v v +=1n BA BA A B a a a a ++=τ0A =a 0BA =τa2C基点CAA C v v v +=3n CACA A C a a a a ++=τ0A =a4C 动系BD e r C v v v +=B e v v=5e r C a a a +=B e a a=6由135得CA A BA A r v v v v v +=++ yo o 30cos 30sin CA BA v v=rad/s 13/CA AC ==ωr vxo o 30sin 30cos CA BA r v v -v −=cm/s 320r =v 由246得n CA CA n BA r a a a a +=+τy oo o 30sin 30cos 30cos n CA CA BA a a a n −=−τ2CA AC rad/s 3/383/−==ατr a 分析法取θϕ为坐标存在约束方程θ=ϕcos sin 3r r 高丽营对上式连续求导得θθ−=ϕϕ&&sin cos 3θθ−θθ−=ϕϕ−ϕϕ&&&&&&sin cos sin 3cos 322将o 30=ϕ=θrad/s 3/A−=−=θr v &0=θ&&代入得rad/s 1=ϕ&2rad/s 3/38−=ϕ&&令BC =ρ则有θ−ϕ=ρsin cos 3r r 因此cm/s 320|)cos sin 3(30r =θθ+ϕϕ−=ρ==ϕ=θo&&&r v7.32 图示机构中已知杆AB 相对杆OA 的角速度ω=ωr 杆AB 相对杆OA 的角加速度0r =α杆AB 长为l 2l OC =求图示位置杆AB 上点B 的速度和加速度解矢量法杆动系杆OA r AB ω+ω=ωOA r AB ααα+=0r =α动系套筒AB C ω=ωABC αα=e r a v v v +=ea 30cos v v =oω=ω2OA ω=ω=ω3AB Clv v a ω==32/r k n e e r n a a a a a a a a +++=+ττOA 3αl 2OA 3ωl C αl 2C ωl r C 2v ωx ′k e n a a 30sin 30cos a a a a −−=−−ττo o 2OA C 38ω=α=αy ′n e r n a a 30cos 30sin a a a a −−=−τo o 2r 15ω=a动系套筒er a v v v ′+′=′Q r r v v =′e e v v −=′iv l a ω−=′32kn e e r a a a a a a ′+++′=′′τ′其中r r a a =′ττ′−=e e a a n e n e a a −=′kk a a =′xl a a a a a 2e k n e r ax 1530cos )(30sin )(ω−=−′++′−=′τ′′o oy l a a a a a 2e k n e r ay 31130sin )(30cos )(ω−=−′−+′−=′τ′′o o 分析法本题一自由度取θϕ为坐标存在如下约束)sin(sin 3=ϕ+θ−θ对上式连续求导有0))(cos(cos 3=ϕ+θϕ+θ−θθ&&&0))(sin())(cos(cos 3sin ))(cos()sin (cos 322=ϕ+θϕ+θ+ϕ+θϕ+θ−θθ+ϕ+θϕ+θ−θθ−θθ&&&&&&&&&&&&o 30=ϕ=θ时ω=ω=θr &0=α=θr&&代入以上二式得ω=ϕ2&238ω=ϕ&&取为原点点坐标为)cos(2cos 3ϕ+θ+ϕ−=l l x B )sin(2sin 3ϕ+θ+ϕ−=l l y B 对上二式连续求导并代入具体数值解出l l l xB ω−=ϕ+θϕ+θ−ϕϕ=32))(sin(2sin 3&&&&0))(cos(2cos 3=ϕ+θϕ+θ+ϕϕ−=&&&&l l y B )cos (sin 32ϕϕ+ϕϕ=&&&&&l xB l l 2215]))(cos())([sin(2ω−=ϕ+θϕ+θ+ϕ+θϕ+θ−&&&&&&)sin (cos 32ϕϕ−ϕϕ−=&&&&&l y B l l 22311]))(sin())([cos(2ω−=ϕ+θϕ+θ−ϕ+θϕ+θ+&&&&&&。