25t-30m门座起重机电气说明书
- 格式:doc
- 大小:53.00 KB
- 文档页数:7

门式起重机使用说明书_图文电动葫芦门式起重机使用说明书河南省重力起重机有限公司使用说明书共13页电动葫芦门式起重机目录一、概述————————————————(1) 二、安装————————————————(2-4) 三、架设————————————————(4-7) 四、调整与维修—————————————(7-8) 五、机构的润滑—————————————(8-9) 六、运转试验——————————————(10-11) 七、易损件图——————————————(12) 八、附总图———————————————(13)使用说明书共13页第1页电动葫芦门式起重机一、概述1、用途电动葫芦门式起重机是根据标准JB566.3.2-91设计制造的,与CD、MD等电动葫芦配套使用,成为一种轻小型的单梁葫芦起重机,主要用于露天堆场的装卸和搬运物料。
起重量3-20T跨度一般S?22m,操纵形式分地面和司机室两种,本机具有结构简单,维修方便,自重轻等优点。
2、结构形式电动葫芦门式起重机是由主梁、支腿、上端梁、下端梁组成桥架。
而桥架又分为箱形和桁架两种形式,分别是由钢板和型钢组焊而成,后者自重轻、风压高,但工艺不如前者。
为便于储存和运输,主梁、支腿、下横梁各部件之间由螺栓连接。
3、起升机构电动葫芦作为起升机构,并沿主梁运行,其结构见电动葫芦说明书。
4、大车运行机构当起重机的起重量和跨度较小,工作又不频繁时,大车运行机构采用LD电动单梁的“三合一”运行机构,反之采用角型轴承箱结构。
二、安装1、注意事项起重机运到后,在卸车搬运时应防止扭、弯、撞伤等事故,存放时应安置平稳,地面应结实,防止日久下沉致使主梁变形,安装时应组织有关人员认真研究图纸,根据技术要求消除由于运输不当和保管不当所产生的误差和缺陷,特点对金属结构部分的缺陷需校正后才准安装。
使用说明书共13页第2页电动葫芦门式起重机2、葫芦门吊的安装a: 门吊的安装比较复杂,一般次序是先将主梁、支腿、下横梁分别在地面安装好,然后将支腿与主梁、下横梁用螺栓连接起来,对于长度大于35m的主梁需在地面组装连好,进行满焊。

一、总体概述1、概要本起重机是为港口通用码头设计制造的,主要用于散货和重大件货物的装卸。
本机为刚性四连杆组合臂架式起重机。
它主要由起升机构、变幅机构、回转机构、运行机构、四连杆组合臂架系统、臂架平衡系统、立柱、转台、机器房、司机室、转柱、门架、梯子栏杆系统、电气控制系统和其它辅助装置所组成。
本机采用吊钩、抓斗作业,在33米幅度范围内的起重能力为25吨,在25米幅度范围内的起重能力为35吨。
本机可带载作水平位移变幅和3600角度回转。
起升、变幅,回转机构可以单独动作,也可联合动作。
整机可沿水平铺设的轨道作直线行驶。
起升、变幅、运行机构均采用交流变频调速,回转机构采用串电阻调速。
各机构均设置有必要的限位开关和联锁保护装置。
本机回转中心位于门架对称中心,海陆侧门腿共由四组八轮台车组支承,在门架端梁下方各配有一组锚定装置,在运行机构两端均设有缓冲器。
本机动力使用380V,50Hz交流电源。
供电方式是将设在码头海侧地面电源箱中的电源,通过电缆由装在海侧门腿上的磁滞式电缆卷筒引缆上机,给起重机供电。
起重机固定部分与回转部分由中心受电器相连。
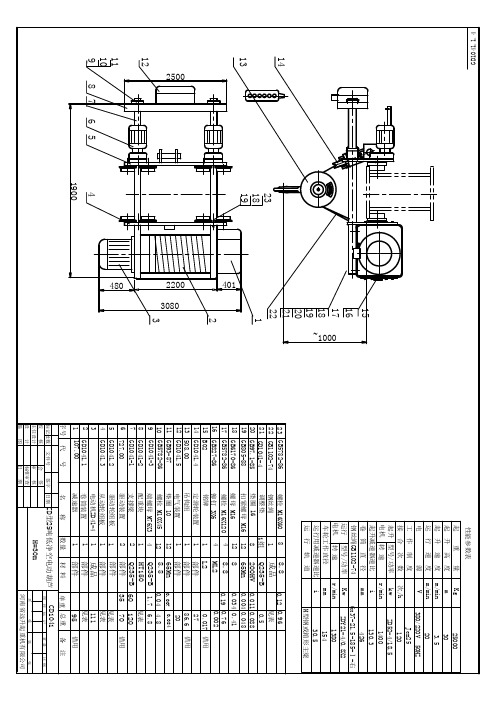
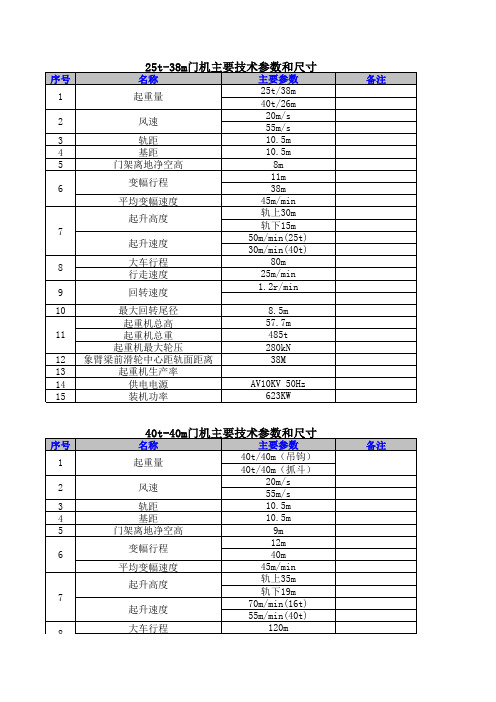
2、主要技术参数起重能力吊钩下起重量: 25t/33m,35t/25m抓斗下起重量: 16t/33m工作幅度最大幅度: 33 m最小幅度: 11 m工作速度起升机构: 50 m/min(16t) ,30 m/min(25t), 25 m/min(35t)变幅机构: 50m/min回转机构: 1.5 rpm运行机构: 26 m/min起升高度轨道上:(吊钩下) 28 m轨道下: 16 m工作级别起升机构: M8变幅机构: M7回转机构: M7运行机构: M4整机: A8净空参数轨距: 10.5 m基距: 10.5 m门架净空高: 6.1 m最大尾部半径: 8.14 m整机最大高度: 50.46m(最小幅度)缓冲器外总宽: 19.4 m整机行走参数行走距离:±80 m行走轨道: P50行走车轮: 8个/每腿,其中驱动轮4个/每腿锚定装置: 2组(手动)缓冲器: 1组/每腿(橡胶块式)缓冲器撞击高度: 355 mm电动机总功率: 435 kW供电方式整机行走:电缆卷筒,电缆卷绕长度80m电源:交流 380V,50Hz3、起重机总布置图MQ2533-00 起重机总图二、工作机构本起重机工作机构包括起升机构、变幅机构、回转机构、运行机构。
日照港岚北港务有限公司25T-37M门座式起重机技术规格书第一章概述1.1 总则 (4)1.2 安装地点 (5)1.3 设计制造标准 (5)1.4 工作条件 (6)1.5 起重机工作级别 (7)1.6 稳定性 (8)1.7 主要技术参数 (8)1.8 供货范围 (9)1.9 供货方式、交货期 (10)第二章结构2.1 一般要求 (11)2.2 材料 (11)2.3 金属结构制造工艺 (11)2.4 臂架、门架、主梁和端梁 (13)2.5 四连杆机构和人字架 (14)2.6 平台、通道、阶梯和直梯 (14)2.7 机房 (14)2.8 电气房 (15)2.9 高压室 (16)2.10 司机室 (16)第三章工作机构3.1 一般要求 (19)3.2 一般机械零部件 (20)3.3 起升机构 (23)3.4 变幅机构 (24)3.5 旋转机构 (25)3.6 行走机构 (26)3.7 安全连锁保护装置 (27)3.8 润滑系统 (29)第四章电气与控制4.1 电气系统一般准则 (30)4.2 供配电系统 (30)4.3 主要电气设备 (33)4.4 司机室操作 (35)4.5 配电屏与控制屏、柜与端子 (35)4.6 电缆和电缆敷设 (36)4.7 照明 (37)4.8 接地和防雷 (38)4.9 起重机监控管理系统(CMS) (38)第五章通信5.1 有线电话通信 (42)5.2 无线电话对讲机 (42)5.3 扩音设备 (42)第六章涂装6.1 预处理和底漆 (43)6.2 油漆厚度 (44)第七章标记和铭牌、起重机基本配置和备品备件7.1 标记和铭牌 (45)7.2 起重机基本配置 (46)7.3 备品和备件 (47)第八章项目管理和相关要求8.1 设计审查及图纸资料 (49)8.2 竣工图和最终技术文件 (51)8.3 监造 (53)8.4 培训 (55)第九章安装、调试和验收9.1 运输 (55)9.2 现场安装调试 (56)9.3 起重机的最终验收 (58)第一章概述本技术规格书其内容明确本次招标的起重机基本的技术要求和确保这些基本技术要求所必须的相关条款,并非起重机的所有细节,投标人应仔细阅读,如发现有疑问、不详和矛盾之处,请立即与招标人及时联系。

目录引言 ............................................................ - 5 - 第1章 小车主起升机构计算 ...................................... - 8 -1.1 确定传动方案,选择滑轮组和吊钩组 ........................ - 8 -1.2 选择钢丝绳 .............................................. - 8 -1.3 确定卷筒尺寸,转速及滑轮直径 ............................. - 8 -1.4 计算起升静功率 ......................................... - 10 -1.5 初选电动机 ............................................. - 11 -1.6 选用减速器 ............................................. - 11 -1.7 电动机过载验算和发热验算 ............................... - 11 -1.8 选择制动器 ............................................. - 12 -1.9 选择联轴器 ............................................. - 13 -1.10 验算起动时间 .......................................... - 13 -1.11 验算制动时间 .......................................... - 14 -1.12高速轴计算 ............................................. - 15 -1.12.1疲劳计算 ......................................... - 15 -1.12.2静强度计算 ....................................... - 16 - 第二章 小车副起升机构计算 ..................................... - 17 -2.1 确定传动方案,选择滑轮组和吊钩组 ........................ - 17 -2.2 选择钢丝绳 ............................................. - 17 -2.3 确定卷筒尺寸并验算强度 ................................. - 18 -2.4 计算起升静功率 ......................................... - 19 -2.5 初选电动机 ............................................. - 20 -2.6 选用减速器 ............................................. - 20 -2.7 电动机过载验算和发热验算 ............................... - 21 -2.8 选择制动器 ............................................. - 21 -2.9 选择联轴器 ............................................. - 22 -2.10 验算起动时间 .......................................... - 22 -2.11 验算制动时间 .......................................... - 23 -2.12 高速轴计算 ............................................ - 24 -2.12.1疲劳计算: ....................................... - 24 -2.12.2静强度计算 ....................................... - 25 - 第三章 小车运行机构计算 ....................................... - 26 -3.1 确定机构传动方案 ....................................... - 26 -3.2 选择车轮与轨道并验算其强度 ............................. - 26 -3.2.1疲劳计算 .......................................... - 26 -3.2.2强度校核 .......................................... - 27 -3.3 运行阻力计算 ........................................... - 27 -3.4 选电动机 ............................................... - 28 -3.5验算电动机发热条件 ...................................... - 29 -3.6 选择减速器 ............................................. - 29 -3.7 验算运行速度和实际所需功率 ............................. - 29 -3.8 验算起动条件 ........................................... - 30 -3.9 按起动工况校核减速器功率 ............................... - 31 -3.10 验算起动不打滑条件 .................................... - 31 -3.11 选择制动器 ............................................ - 32 -3.12 选择联轴器 ............................................ - 33 -3.12.1机构高速轴上联轴器的计算扭矩 ..................... - 33 -3.12.2低速轴的计算扭矩 ................................. - 34 -3.13 验算低速浮动轴强度 .................................... - 34 -3.13.1疲劳计算 ......................................... - 34 -3.13.2 静强度计算 ....................................... - 35 -3.14 小车安全装置计算 .................................... - 35 -3.14.1 小车缓冲器 ....................................... - 35 -3.14.2 缓冲行程 ......................................... - 35 -3.14.3 缓冲能量 ......................................... - 35 -3.14.4 最大缓冲力 ....................................... - 36 -3.14.5 橡胶缓冲器的主要尺寸 橡胶断面积A ................ - 36 -3.14.6 缓冲器的额定缓冲行程,额定缓冲容量和极限缓冲力: .. - 36 -3.14.7 实际的缓冲行程,最大缓冲力和最大减速度 ........... - 37 - 第四章 大车运行机构的设计计算 ................................. - 38 -4.1车轮与轨道的选择 ........................................ - 38 -4.2 运行阻力计算: ......................................... - 39 -4.2.1 摩擦阻力的计算: ................................... - 39 -4.2.2 坡度阻力的计算: .................................. - 39 -4.2.3 风阻力的计算: .................................... - 39 -4.2.4 运行总阻力: ...................................... - 40 -4.3 电动机的选择 ........................................... - 40 -4.4 选择减速器 ............................................. - 41 -4.5 选择连轴器 ............................................. - 41 -4.6 电动机的验算 ........................................... - 42 -4.6.1 电动机的过载能力验算 .............................. - 42 -4.6.2电动机的发热验算 .................................. - 42 -4.6.3 启动时间的验算 .................................... - 43 -4.7减速器的验算 ............................................ - 44 -4.8制动器的选择 ............................................ - 45 -4.9起动和制动打滑验算 ...................................... - 46 -4.9.1起动时期不打滑验算 ................................ - 46 -4.9.2 制动不打滑验算 .................................... - 47 - 设计心得 ....................................................... - 48 - 致谢 ........................................................... - 49 -32/5吨通用门式起重机设计摘 要:次设计的为通用A型双梁门式起重机,我主要负责设计门式起重机的小车及大车运行机构。
青岛振兴起重安装有限公司
吊车性能手册
刖言
QY8B (2节)3台
QY12 (3节)1台无付臂,外协
QY16 (3节)1台
QY25 (3节)1台
QY25 B (4节)1台
QY50t (4节)1台
注:25t吊车另页输入,见《25t性能表》
一、起重机作业状态性能参数表
注:()增幅总起重量为带增幅机构时的总起重量
(2)表中粗线上方是以吊臂强度确定的总起重量值,下方是以稳定性确定的总起重量值
注:(1)表中粗线上方是以吊臂强度确定的总起重量值,下方是以稳定性确定的总起重量值
(2)吊钩重150kg
注:(1)表中粗线上方是以吊臂强度确定的总起重量值,下方是以稳定性确定的总起重量值
(2)上表主臂端部若装副臂时,主钓钩起重量应将表中相应数值减少400kg
(3)吊钓钩重180kg
4、QY25(自制底盘、三节臂、四节臂)起重特性表表4-1
表4-2
注:(1)表中粗线上方是以吊臂强度确定的总起重量值,下方是以稳定性确定的总起重量值
(2 )额定总起重量表中的所有数值,均包括吊具及吊钩的重量(主钩515kg,中长臂吊钩250kg,副钩100kg)
(3 )以装有副臂的主臂进行工作时,应以上表中主臂额定起重量减去相应的重量,当副臂8.5m时,减去2t,当副臂
13.5m 时,减去2.5t
(4)臂端单滑轮的额定总起重量与8.5m副臂(倾角5° 时)的起重量相同,以4t为其上限值
(5)使用前支腿时,即使在前方区也可适用“侧方、后方区”的额定总起重量
、起重机行驶状态主要技术参数
1
27
3
3
3。
25t-30m门座起重机电气说明书一. 概要本起重机是以件杂货及散货为主的门座起重机。
本机动力使用380V,50HZ交流电源。
它的供电方式是将岸电通过船体主配电柜和支承圆筒内的中心受电器传送到机器房内的电控柜,由电控柜将电源分配给各驱动机构,由司机室集中操作,来控制各个工作机构的工作。
起升机构采用交流变频控制,机构配有超负荷保护装置等,能确保起重机工作安全、高效率。
变幅机构采用交流变频控制,起、停平稳,冲击小,确保使用安全。
旋转机构采用交流变频控制,双电机双减速器分别驱动。
为了便于工作人员上下起重机和维修人员的维修保养工作,在起重机适当位置设置有斜梯,可从地面到达机器房和驾驶室。
整机的梯子、走道和平台,可以使工作人员到达所需要检查、维修和保养的地点。
所有的梯子、走道和平台,紧固、宽敞,确保安全。
在司机室内、机器房内装设照明灯,司机室顶装投光灯,臂架头部设航空灯。
本机金属结构:支承圆筒、转盘、人字架及臂架均采用钢板焊接或管材焊接结构型式;保证结构的刚度及强度,保证整机的安全。
本机各机构设有各种行程限位开关,联锁装置及超载保护装置,确保整机的安全工作和性能完善。
二. 主要技术参数三、电气控制系统说明1. 电源部分参考图纸: 第1-2页本机采用交流380V、50Hz三相四线制供电系统。
由码头地面接线箱通过重型橡套软电缆YCW(3×150+1×50)经电缆卷筒受电器E1接至下转台总开关箱中倒顺开关QS, 再经中心受电器E2接至总电源断路器QM1,QS的设置主要为检修中心受电器时便于切断外供电源, 总电源断路器QM1设置在电源控制柜中, 其额定容量根据装机总容量选配, 具有短路,过载等保护功能。
本机设有电源相序保护,门机上电时通过相序继电器检测,如果相序接错,须操作倒顺开关QS,使电源相序正确。
整机工作电源由总电源断路器出线端引出向机上各机构的主回路供电。
在门腿、联动台和电源柜门上均设有紧停按钮,紧急情况下用来分断总电源断路器,切断整机工作电源。
引言:起重机是一种常见的重型机械设备,主要用于在建筑工地、港口、仓库等场所进行货物的起卸和搬运工作。
为了确保起重机的安全使用和提高工作效率,制定一份详细的起重机使用说明书十分必要。
本文将围绕起重机的使用和维护进行阐述,以帮助用户正确操作和保养起重机。
概述:本文将以起重机使用说明书(二)为主题,详细阐述起重机的使用和维护。
将介绍起重机的基本原理和结构,然后重点讲解起重机的操作要点和安全事项。
还将介绍起重机的维护保养方法和常见故障处理措施。
进行总结,强调起重机在工作中的重要性和正确使用的意义。
正文内容:一、起重机的基本原理和结构1.1起重机的工作原理1.2起重机的组成部分和结构1.3不同类型起重机的特点和适用场景二、起重机的操作要点和安全事项2.1操作起重机的前期准备工作2.2起重机的起升、行走和回转操作技巧2.3起重机的安全事项和操作注意事项2.4起重机的载荷限制和配重的使用规范2.5高温、低温等特殊环境下的起重机操作安全措施三、起重机的维护保养方法3.1起重机的日常检查和保养工作3.2起重机润滑和液压系统的维护3.3起重机电气系统的检修和维护3.4起重机钢丝绳和安全装置的保养及更换3.5定期维护保养计划的制定和执行四、起重机常见故障处理措施4.1起重机电气故障的排查和处理4.2起重机液压系统故障的排查和处理4.3起重机传动系统故障的排查和处理4.4起重机结构部件故障的排查和处理4.5起重机常见故障处理的预防措施和经验总结五、总结本文对起重机的使用和维护进行了详细的阐述,通过介绍起重机的基本原理和结构,以及操作要点和安全事项,帮助用户掌握正确的起重机操作方法。
本文还详细介绍了起重机的维护保养方法和常见故障处理措施,以确保起重机能够长时间、稳定地工作。
起重机作为一种重要的机械设备,在工业生产中起到关键的作用,正确使用起重机将大大提高工作效率和安全性。
因此,用户在操作起重机时,务必要按照本文所述的方法进行,遵守操作规范,确保起重机的安全运行。
一、总体概述1、概要本起重机是为港口通用码头设计制造的,主要用于散货和重大件货物的装卸。
本机为刚性四连杆组合臂架式起重机。
它主要由起升机构、变幅机构、回转机构、运行机构、四连杆组合臂架系统、臂架平衡系统、立柱、转台、机器房、司机室、转柱、门架、梯子栏杆系统、电气控制系统和其它辅助装置所组成。
本机采用吊钩、抓斗作业,在35米幅度范围内抓斗起重能力为25吨,起升速度55m/min、在35米幅度范围内吊钩起重能力为40吨,起升速度35m/min。
本机可带载作水平位移变幅和360°角度回转。
起升、变幅,回转机构可以单独动作,也可联合动作。
整机可沿水平铺设的轨道作直线行驶。
起升、变幅、回转,运行机构均采用交流变频调速,回转机构采用串电阻调速。
各机构均设置有必要的限位开关和联锁保护装置。
本机回转中心位于门架对称中心,海陆侧门腿共由四组十轮台车组支承,在门架端梁下方各配有一组锚定装置,在运行机构两端均设有缓冲器。
本机动力使用380V,50Hz交流电源。
供电方式是将设在码头海侧地面电源箱中的电源,通过电缆由装在海侧门腿上的磁滞式电缆卷筒引缆上机,给起重机供电。
起重机固定部分与回转部分由中心受电器相连。
2、主要技术参数起重能力吊钩:40t/35m抓斗:25t/35m工作幅度最大幅度:35 m11 m最小幅度:工作速度起升机构:55m/min (25t 抓斗),35m/min(40t 吊钩)变幅机构:50m/min(25t 抓斗),50m/min(40t 吊钩)回转机构: 1.2rpm运行机构:26m/min起升高度16 mM8 M7 M7 M4 A810.5 m 10.5 m 7 m 8.2 m53.49m (最小幅度) 22.208m± 60 mQU100 个/每腿,其中驱动轮 5 个/每腿 2 组(手动)组/ 每腿(橡胶块式)500 mm 627 kW电缆卷筒,大电缆卷绕长度 83m ; 交流 380V , 50Hz起重机总图轨道上:(吊钩下) 轨道下: 工作级别起升机构: 变幅机构: 回转机构: 运行机构: 整 机: 净空参数轨 距:基 距: 门架净空高: 最大尾部半径: 整机最大高度: 缓冲器外总宽: 整机行走参数行走距离 : 行走轨道:行走车轮: 9 锚定装置: 缓冲器: 1 缓冲器撞击高度: 电动机总功率: 供电方式整机行走: 电 源:3、起重机总布置图MQ4035-0028 m 16 m二、工作机构本起重机工作机构包括起升机构、变幅机构、回转机构、运行机构。
25t-30m门座起重机电气说明书一. 概要本起重机是以件杂货及散货为主的门座起重机。
本机动力使用380V,50HZ交流电源。
它的供电方式是将岸电通过船体主配电柜和支承圆筒内的中心受电器传送到机器房内的电控柜,由电控柜将电源分配给各驱动机构,由司机室集中操作,来控制各个工作机构的工作。
起升机构采用交流变频控制,机构配有超负荷保护装置等,能确保起重机工作安全、高效率。
变幅机构采用交流变频控制,起、停平稳,冲击小,确保使用安全。
旋转机构采用交流变频控制,双电机双减速器分别驱动。
为了便于工作人员上下起重机和维修人员的维修保养工作,在起重机适当位置设置有斜梯,可从地面到达机器房和驾驶室。
整机的梯子、走道和平台,可以使工作人员到达所需要检查、维修和保养的地点。
所有的梯子、走道和平台,紧固、宽敞,确保安全。
在司机室内、机器房内装设照明灯,司机室顶装投光灯,臂架头部设航空灯。
本机金属结构:支承圆筒、转盘、人字架及臂架均采用钢板焊接或管材焊接结构型式;保证结构的刚度及强度,保证整机的安全。
本机各机构设有各种行程限位开关,联锁装置及超载保护装置,确保整机的安全工作和性能完善。
二. 主要技术参数三、电气控制系统说明1. 电源部分参考图纸: 第1-2页本机采用交流380V、50Hz三相四线制供电系统。
由码头地面接线箱通过重型橡套软电缆YCW(3×150+1×50)经电缆卷筒受电器E1接至下转台总开关箱中倒顺开关QS, 再经中心受电器E2接至总电源断路器QM1,QS的设置主要为检修中心受电器时便于切断外供电源, 总电源断路器QM1设置在电源控制柜中, 其额定容量根据装机总容量选配, 具有短路,过载等保护功能。
本机设有电源相序保护,门机上电时通过相序继电器检测,如果相序接错,须操作倒顺开关QS,使电源相序正确。
整机工作电源由总电源断路器出线端引出向机上各机构的主回路供电。
在门腿、联动台和电源柜门上均设有紧停按钮,紧急情况下用来分断总电源断路器,切断整机工作电源。
总电源部分设置了电度表、电流表、电压表和电压表换相开关, 检测电源各相电压是否平衡或缺相以及工作电流。
电源柜中设置了独立的AC380V/AC220V控制变压器,为紧停回路、各机构控制回路、PLC电源提供电源。
照明系统电源直接经过中心受电器接入,就是为了保证机器在不工作的状态下也有照明。
控制电源必须在总隔离开关QS合闸的状态下才可通过。
相序通过相序继电器检测,如果相序接错,须重接。
注意主电缆接线时,同一相上线号应一致,防止短路。
SB1~SB4为急停按钮, 为常开式, 其中SB1设于电气房总电源, SB2~SB4分别设于联动台及支腿上,遇有紧急情况, 可及时切断各机构控制变频器电源, 停止起重机的一切工作。
总电源部分设置了电压表, 电流表, SV为电压表换相开关, 检测电源各相电压, 电流表检测A相电流。
电铃DL由脚踏控制操作。
控制电源为AC220V,设空气开关QM9、QM10、QM11进行短路保护, 控制电源输出到各机构控制柜,24V直流电源及PLC柜的控制回路电源。
2. 起升机构参考图纸: 图纸起升机构起升机构采用二台110kw变频电机驱动,起升变频器选用二台安川公司h1000变频器,带PG卡,选用闭环矢量控制模式,系统具有足够的调速硬度和良好的低频转矩特性,即使在0Hz电机也能以150%额定转矩输出。
起升机构闭环控制的速度反馈采用增量型脉冲编码器。
起升机构的自动开闭斗采用司机室内脚踏开关来实现,变频器与PLC之间采用DP传输方式,通过操作主令控制器档位传输给PLC输入,在由PLC输出来控制变频器的频率及电动机的转速。
起升机构采用双制动器控制, 实现零速抱闸,可以全速受控,减少抱闸闭合时的振动及抱闸磨损,使停车更平稳起升机构的电气保护有短路及过电流保护, 过载保护, 失压, 缺相及零位保护, 超负荷保护;当变频器出现故障信号时, 必须通过联动台上的故障复位按钮进行复位。
负荷限制器设定为100%额定负载(或力矩)时发出声光报警, 110%额定负载则自动切断上升,超负荷限制器的显示器装在司机操作台的前方, 具有重量显示。
起升机构主令控制器为档位调速,通过脚踏来实现抓斗和正常起升的切换。
起升机构上升/下降限位设有三级, 当向某一方向运行时第一级限位动作后, 进行减速, 第二级限位起作用, 起升机构停止运行,第三及切断机构接触器;反之亦然。
3. 旋转大车机构参考图纸:图纸变幅机构、行走辅助机构和行走机构。
旋转和大车公用一台安川变频器,选用的是型号为h1000旋转机构采用2台22KW变频电机驱动,大车采用8台5.5KW的变频电机驱动,传动方案采用交流变频调速,共用一台安川变频器,选用的是型号为h1000,两个通过变频器不同的参数控制,外部通过接触器来切换变幅电机和大车行走电机。
旋转大车机构的电气保护有短路, 过载, 失压, 缺相及零位保护, 变频器设有故障输出, 当变频器出现故障信号时, 必须通过联动台上的故障复位按钮进行复位。
4. 变幅机构参考图纸: 图纸变幅部分变幅机构采用一台22KW变频电动机驱动, 传动方案采用交流变频调速. 变频器选用一台安川公司h1000变频器,变频器控制模式,选用auto 控制模式。
变幅机构的电气保护有短路及过载保护, 失压, 缺相及零位保护, 旋转锚定联锁保护, 变频器设有故障输出, 当变频器出现故障信号时, 必须通过联动台上的故障复位按钮进行复位。
变幅机构减幅/增幅限位及大车设有三级, 且为三套独立而直观的装置, 当向某一方向运行时第一级限位动作后,进行减速, 变频器自动运行在最低速; 当第二级限位动作后, 停止运行, 但可操纵手柄往反方向运行, 若第二级限位失灵, 第三级超限位起作用,切断机构主接触器。
5. PLC控制及故障监控系统参考图纸: 图纸控制部分整机控制系统采用日本OMRON公司C200HE系列PLC,模块化结构,应用软件由Windows 2000/ Windows XP界面下的CX-programmer支持,系统为DP通讯系统。
故障监控系统由PLC及MT510触摸式图形显示器组成友好的人机界面,用图形和文字实时显示故障的位置及简单处理的方法,监控各主要电器元件运行或停止的状态。
6. 照明系统参考图纸: 图纸照明维修四.操作说明1.操作前检查1)合上电气柜内所有断路器和开关,检测各控制柜内三相电源均为380V (控制、照明电源为220V),PLC工作正常;2)确认各操作机构的机械部分无碍于操作;3)打开联动台上的“电锁”开关,“控制电源”指示灯亮,接通控制各机构电源接触器,检测各控制柜控制电源均为220V;打开联动台上的“电锁”开关,“控制电源”指示灯不亮,控制各机构电源接触器断开。
4)按下联动台上的“急停”按钮,断开主控制电源断路器;5)在联动台上按下“试灯”按钮,查看所有指示灯应点亮,蜂鸣器应讯响,然后松开;6)确定旋转机构的锚定及手轮锁定装置。
2.正确的操作1)系统总控操作所有主令控制器处于零位自由状态,按下联动台上的主电源通按钮,控制电源指示灯亮,表示控制电源已接通。
暂不工作时,按下联动台上的主电源断按钮,断开控制电源,防止误操作。
如遇紧急情况,应迅速按下“急停”按钮,断开主电源。
2)起升机构操作* 司机必须用手按下主令控制器上端的开关后操作,且在操作主令杆过程中始终按住此开关,否则控制命令无效。
* 操作手柄从零位推至所需档位,或由一个方向推至另一个方向PLC会控制变频器以设定的加、减速时间平稳加、减速至所需速度。
* 当起吊的货物超载时,称重仪将发出警报声,起升机构只能以低速下降操作。
* 起升机构的上升和下降均设有减速、停止和极限限位,当减速限位动作时,起升机构以慢速运行,直至碰到停止限位,停止限位动作后PLC 将禁止起升机构该方向的操作,但可反向操作,即出停止限位。
当起升机构由于不明原因冲过停止限位碰到极限限位时,PLC会报出故障,这时只能向另一方向慢速运行直至退出极限限位。
* 当起升速度超过正常速度,或发生变频器故障或其他故障时,PLC将禁止起升机构的所有动作,直至查出故障原因,并排除故障后,才能恢复运行。
* 通过选择开关可选择左单机,右单机,双机工作,抓斗,作为调整之用。
3)变幅机构操作* 同起升机构,司机必须用手按下主令控制器上端的开关后操作,且在操作主令杆过程中始终按住此开关,否则控制命令无效。
* 操作手柄从零位推至所需档位,或由一个方向推至另一个方向,PLC会控制变频器以设定的加、减速时间平稳加、减速至所需速度。
* 当起吊的货物超载时,称重仪将发出警报声,只能按起升超载步骤将重物放下后才能操作变幅机构。
* 变幅机构的增幅和减幅均有减速、停止和极限限位,当减速限位动作时,变幅机构以慢速运行,直至碰到停止限位,停止限位动作后PLC将禁止变幅机构该方向的操作,但可反向操作,即出停止限位。
当变幅机构由于不明原因冲过停止限位碰到极限限位时,PLC会报出故障,这时只能向另一方向慢速运行直至操作变幅主令,退出极限限位。
* 当变幅机构发生变频器故障或其他故障时,PLC将禁止变幅机构的所有动作,直至查出故障原因,并排除故障后,才能恢复运行。
3)旋转机构操作* 同起升机构,司机必须用手按下主令控制器上端的开关后操作,且在操作主令杆过程中始终按住此按钮,否则控制命令无效。
* 确认旋转锚定已解除,触摸屏上指示“旋转锚定”已解除,当需要旋转锚定时,此时回转机构中能以极慢的速度转动,直至锚定块落入锚定坑内,触摸屏上“旋转锚定”指示已锚定。
* 操作手柄从零位推至所需档位,或由一个方向推至另一个方向,PLC会控制变频器以设定的加、减速时间平稳加、减速至所需速度。
* 当旋转机构发生变频器故障或其他故障时,PLC将禁止回转机构的所有故障动作,直至查出故障原因,并排除故障后,才能恢复运行。
3)大车机构操作* 同起升机构,司机必须用手按下主令控制器上端的开关后操作,且在操作主令杆过程中始终按住此按钮,否则控制命令无效。
* 确认大车锚定,铁鞋已解除,触摸屏上指示“大车锚定”,“大车铁鞋”已解除,当需要大车锚定时,此时大车机构中能以极慢的速度转动,直至锚定块落入锚定坑内,触摸屏上“大车锚定”指示已锚定。
* 操作手柄从零位推至所需档位,或由一个方向推至另一个方向,PLC会控制变频器以设定的加、减速时间平稳加、减速至所需速度。
* 当大车机构发生变频器故障或其他故障时,PLC将禁止大车机构的所有故障动作,直至查出故障原因,并排除故障后,才能恢复运行。