牛舍清洁机器人设计及模型建立
- 格式:pdf
- 大小:137.72 KB
- 文档页数:1

一种新型水泥库清理机器人设计与优化水泥库清理是一个繁重、耗时且危险的任务,传统的清理方法往往需要人工在高温、有毒的环境下进行操作,存在着工作效率低、安全隐患大等问题。
为了解决这些问题,我们团队设计并优化了一种新型水泥库清理机器人,旨在提高清理效率、保障工作安全。
一、机器人设计原理我们的水泥库清理机器人采用轨道式移动结构,可以沿着水泥库内部的轨道进行移动。
机器人配备有高清晰度摄像头和传感器,可以通过实时监控和数据采集对水泥库内部进行全面扫描和分析。
在清理过程中,机器人可以实时调整工作区域,确保水泥库的每个角落都得到清理。
二、机器人功能模块1.轨道式移动模块:机器人配备有自动识别轨道的功能,能够精准移动在设定的轨道上,确保清理作业的连续性和完整性。
2.实时监控模块:机器人配备有高清晰度摄像头和传感器,能够实时监控水泥库内部的情况,并采集关键数据。
3.清理工具模块:机器人搭载具有特殊结构的清理工具,能够有效地清理水泥库内部的污垢和杂物,保障库内的清洁和安全。
4.智能控制模块:机器人配备有智能控制系统,能够根据实时监测数据自动调整清理策略,提高清理效率。
三、机器人优化方案3.自主学习模块:我们为机器人添加了自主学习模块,能够根据工作经验不断优化清理策略,提高适应性和灵活性。
1. 提高清理效率:机器人具有高效的清理工具和智能调度算法,能够显著提高水泥库清理的效率,节约人力和时间成本。
2. 保障工作安全:机器人能够代替人工在水泥库内部进行清理作业,从根本上降低了作业环境对工人的危害,保障了工作安全。
3. 提高清理质量:机器人具有精准的轨道移动功能和智能清理策略,能够确保水泥库内部的每个角落都得到清理,提高了清理质量。
四、结语新型水泥库清理机器人的设计与优化,旨在解决水泥库清理作业的繁重、耗时和危险等问题,提高清理效率、保障工作安全。
我们相信这一创新性的设计将大大改善水泥库清理作业的工作条件,为水泥工业的发展提供有力支持。

一种新型水泥库清理机器人设计与优化水泥库清理一直是一个脏、累、重复劳动的工作,传统的清理方法往往需要大量的人力和时间,而且存在安全隐患。
为了解决这一问题,我们团队设计了一种新型水泥库清理机器人,通过优化设计和智能控制,实现了清洁效率的提升和人力成本的降低。
本文将从设计原理、结构优化和智能控制等方面介绍这种新型水泥库清理机器人的设计与优化过程。
一、设计原理新型水泥库清理机器人的设计原理主要是基于机器人技术和清洁设备技术。
其主要功能是在水泥库内部清理、吸尘和搬运等工作。
机器人采用轨道行走,配备清洁刷、吸尘器和搬运装置,能够自动完成水泥库内的清理工作,大大提高了清洁效率和工作安全性。
在设计过程中,我们充分考虑了水泥库内部环境的复杂性和清洁工作的特点,尤其是水泥堆积的高度和密度问题,因此设计了可以自由伸缩和旋转的清洁刷和吸尘器,以适应不同高度和密度的水泥堆积。
为了提高机器人的搬运能力,我们还设计了具有自动抓取和卸载功能的搬运装置,可以实现水泥袋的自动搬运和堆放。
二、结构优化在结构优化方面,我们主要考虑了机器人的稳定性、可靠性和维护性。
在轨道设计上,我们采用了双轨道结构,可以在水泥库内自由移动,并能够实现对水泥库各个角落的清洁工作。
在机器人本体结构上,我们采用了轻质材料和结构坚固的设计,以保证机器人在清洁作业中的稳定性和耐用性。
我们还设计了可拆卸的清洁刷、吸尘器和搬运装置,以便于机器人的日常维护和更换零部件。
三、智能控制智能控制是新型水泥库清理机器人的核心技术之一,通过智能控制系统的设计,可以实现机器人的自主行走、定位和工作。
在控制系统设计上,我们采用了多传感器融合技术,可以实时获取水泥库内部的环境信息和机器人本体状态,通过自主定位算法和路径规划算法,实现了机器人的自动行走和清洁工作。
我们还设计了远程监控和故障诊断功能,可以通过手机App或者电脑实时监控机器人的工作状态和健康状况,及时发现和排除故障。
我们还在智能控制系统中增加了人机交互界面,可以实现对机器人工作模式和清洁路径的灵活调整,以满足不同水泥库的实际情况和需求。

一种清洁机器人的制作方法摘要本文介绍一种清洁机器人的制作方法,该方法采用了先进的机械设计和程序控制技术,能够有效地清洁居室环境。
文章详细描述了清洁机器人的整体架构、关键部件的设计与选型、以及控制系统的开发过程。
通过合理的设计和优化,本清洁机器人在清洁效率和智能化程度上都表现出色,具有很高的实用价值。
1. 引言如今,随着人们生活水平的提高和人口老龄化的加重,对清洁的需求越来越大。
传统的人工清洁方式无法满足人们的需求,机器人技术成为自动化清洁的重要解决方案。
本文介绍了一种清洁机器人的制作方法,该方法的目标是设计一款高效、智能的清洁机器人,以提高清洁效率和改善居住环境。
2. 清洁机器人的整体架构清洁机器人整体分为机械结构和控制系统两大部分。
机械结构包括外壳、底盘、电动机、轮子等组件,用于实现机器人的移动和清洁功能。
控制系统则包括主控板、传感器、电源等核心部件,用于控制机器人的运动和清洁流程。
3. 设计与选型3.1 外壳设计外壳设计考虑到机器人使用环境的复杂性,采用了坚固耐用的材料,以保护内部的核心部件。
外壳采用简约的设计风格,既美观又实用。
3.2 机械结构设计机械结构设计是清洁机器人设计的核心。
底盘采用坚固的铝合金材料制作,具有良好的承重能力。
电动机选型时考虑功率和效率的平衡,以确保机器人具有足够的清洁能力和续航时间。
轮子则选择了耐磨耐压的材料,提高机器人的移动灵活性和稳定性。
3.3 电路设计电路设计包括主控板、传感器和电源等部分。
主控板采用高性能的微控制器,具有强大的计算和控制能力。
传感器选用多种类型,如红外线传感器、超声波传感器等,用于感知环境和障碍物。
电源模块采用高效节能的设计,以延长机器人的工作时间。
4. 控制系统开发清洁机器人的控制系统是实现清洁功能的关键。
系统开发分为三个阶段:环境感知、路径规划和动作执行。
4.1 环境感知机器人通过传感器获取周围环境信息,如距离、光线、声音等。
基于这些信息,机器人能够自主感知环境和障碍物,避免碰撞,并根据环境变化调整清洁策略。

牛粪清理机器人自主充电系统设计牛粪清理机器人自主充电系统设计引言:如今,农村养牛业已成为农民经济收入的重要来源之一。
然而,饲养大量牛只也带来了一个日益严重的问题:牛粪的处理。
传统的手工清理方式效率低下且卫生状况差,亟待一种高效、环保的解决方案。
因此,设计一款牛粪清理机器人成为当前亟待解决的问题。
为了保证机器人的连续稳定运行,自主充电系统的设计变得至关重要。
一、机器人概述:该牛粪清理机器人由底盘、工作装置、导航系统、清理系统和自主充电系统组成。
其中,自主充电系统为机器人提供稳定的能量供应,并解决了充电行为对机器人工作效率的影响。
二、充电需求分析:1. 高效充电:机器人需要具备快速充电的能力,以确保在工作过程中充电时间的最小化。
预计机器人的工作时间为5小时,因此充电周期应该控制在1小时以内。
2. 自主充电:机器人应该具备自主检测能力,当电量较低时能够主动返回充电桩进行充电。
充电桩的位置应该预先设置并通过导航系统进行识别导航。
3. 稳定充电:充电桩应该提供稳定的电能输出,以确保机器人充电的效果和安全性。
同时,充电桩需要具备防止过冲和短路的保护措施。
三、自主充电系统设计:1. 电池选型:为保证机器人长时间工作,采用高容量锂电池作为能量储备装置。
锂电池具备高能量密度、长寿命和快速充电等特点,非常适合机器人应用。
2. 充电桩设计:充电桩设置在牛舍内,根据地面情况选择平放或固定在墙上。
充电桩配备电阻、稳压器、充电控制模块等,以确保安全充电和自动充电功能。
3. 自主充电算法:机器人通过导航系统定位充电桩位置,当电量低于设定值时,通过路径规划算法返回充电桩进行充电。
充电过程中,充电桩监测机器人电量并控制充电电流,当电量达到设定值时自动停止充电。
四、充电系统实验验证:为验证自主充电系统的稳定性和可靠性,进行了一系列实验。
首先,设置不同电量条件下,测试机器人自主返回充电桩的准确性和精度。
结果显示,机器人能够准确返回充电桩进行充电,路径规划算法的效果良好。

清扫机器人的结构设计(一)引言:清扫机器人的结构设计在现代家庭中起到了越来越重要的作用。
本文将详细介绍清扫机器人的结构设计,包括机器人的外形设计、驱动系统设计、传感系统设计、清扫设备设计以及导航系统设计。
通过了解清扫机器人的各个方面的设计,可以更好地理解和应用清扫机器人。
正文:一、外形设计- 1.1 结构材料的选择- 1.2 外形尺寸的确定- 1.3 外观美观与实用性的平衡- 1.4 操作面板布局设计- 1.5 防护措施的考虑二、驱动系统设计- 2.1 电机选择与布置- 2.2 驱动方式的选择- 2.3 动力输出与传动装置设计- 2.4 驱动系统的控制与调节- 2.5 驱动系统的能效设计三、传感系统设计- 3.1 清扫效果检测传感器的选择- 3.2 障碍物检测传感器的选择- 3.3 地面状态检测传感器的选择- 3.4 清扫机器人与用户交互的传感器设计- 3.5 传感系统的数据处理和反馈设计四、清扫设备设计- 4.1 清扫刷和吸尘器的选型与布置- 4.2 清扫设备的运动轨迹设计- 4.3 清扫设备的清洁效果检测- 4.4 清扫设备的维护与更换- 4.5 清扫设备的噪声控制五、导航系统设计- 5.1 定位技术的选择- 5.2 导航算法的设计- 5.3 地图绘制与路径规划- 5.4 环境识别与自适应导航- 5.5 导航系统的精度与稳定性检验总结:清扫机器人的结构设计关乎机器人的外形、驱动、传感、清扫设备和导航等多个方面。
合理的外形设计能够提高机器人的美观性和实用性;稳定高效的驱动系统设计能够保证机器人的稳定运行;精准可靠的传感系统设计能够提升机器人的感知和交互能力;高效清洁的清扫设备设计能够提高机器人的清扫效果;智能化的导航系统设计能够实现机器人的自主导航。
通过深入了解并综合考虑这些设计要素,可以开发出更加高效、智能和人性化的清扫机器人,为人们创造更加洁净的生活环境。
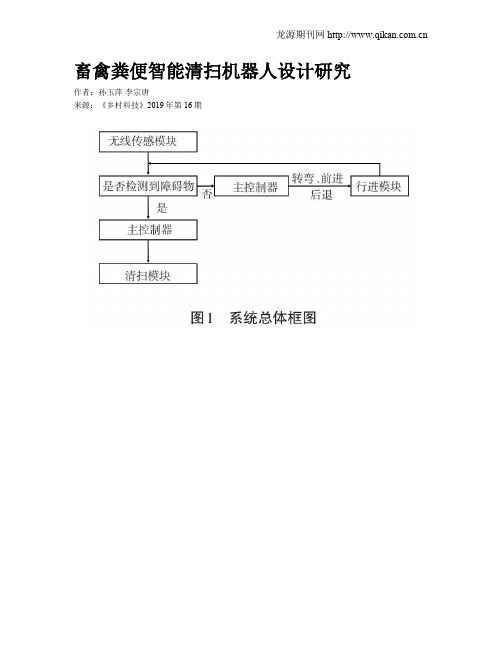
畜禽粪便智能清扫机器人设计研究作者:孙玉萍李宗唐来源:《乡村科技》2019年第16期[摘要] 在乡村振兴战略背景下,生态乡村建设已经成为必然要求。
本文简要介绍一种针对畜禽类粪便处理并综合运用微处理器技术和传感器技术的智能清扫机器人。
本系统利用超声波传感器,通过传感模块将采集的信息发送至主控制器,再由控制器驱动清扫模块完成对禽畜类粪便的收集处理,减轻养殖负担,提高生产效率,实现从粪便清理环节防治粪便污染的目的。
[关键词] 科技兴农;粪便污染;智能清扫[中图分类号] X713 [文献标识码] A [文章编号] 1674-7909(2019)16-125-2在新的发展时期,依靠科学技术推动农业发展,无疑是一项重要的实践命题。
习近平于2013年11月提出精准扶贫思想[1]。
从2013年至今,各地区政府响应习近平的号召,纷纷出台了相应的扶贫政策,而养殖业凭借投资小、精准度高以及收入稳定等优点成为脱贫攻坚的主力军。
党的十九大报告中提出了乡村振兴战略,需要抓好农村人居环境建设,加强农村污染治理和生态环境保护等。
1 背景及目的目前,国家为推动贫困区县经济的发展,鼓励在不破坏生态环境的同时大力发展畜牧业和养殖业。
然而,贫困地区家庭收入的来源主要为青壮年外出务工所得,在家中留守的多是妇女、儿童和老人。
这一群体普遍存在劳动力缺乏、文化水平低的问题,对养殖没有科学认识,对畜禽粪便不能进行科学处理,且环境保护意识薄弱,导致粪便污染管理不能有效开展[2]。
一些养殖户环保意识薄弱,选择在养殖场内设置下水道。
对于畜禽类粪便的清理,他们选择直接用水冲洗,并引流至场外不远处的化粪池中,并经常将未处理的禽畜粪便直接作为肥料施加到农田中。
由于养殖环境较差且未处理的粪便中含有大量有害物质,导致农田受污染情况严重。
养殖户盲目施加肥料,用量不符合农作物的生长需要,导致肥料施加量过大,使农作物出现了贪青、疯长的情况,延长了农作物的生长周期,对农田造成了严重损害,同时大大减少了农作物收益。
清扫机器人的结构设计(二)引言概述:清扫机器人的结构设计是清扫工作的核心,它的设计直接关系到机器人的清扫效果和使用寿命。
本文将从机器人的主要结构组成开始,分别介绍机器人的传感器系统、清扫机构、导航系统、电源系统和控制系统,以及结构设计需要考虑的关键因素。
通过对这些方面的详细阐述,将能为清扫机器人的结构设计提供一定的指导和参考。
正文:1. 传感器系统1.1 摄像头传感器1.2 红外线传感器1.3 超声波传感器1.4 接触传感器1.5 地面接触传感器传感器系统是清扫机器人的重要组成部分,它用于感知环境和障碍物。
摄像头传感器可以实时监控周围环境,并进行图像处理分析;红外线传感器可以检测障碍物的距离和方向;超声波传感器可以测量距离并探测障碍物;接触传感器可用于检测机器人与障碍物的碰撞;地面接触传感器可检测机器人所处的地方是否充满灰尘。
2. 清扫机构2.1 圆形刷2.2 侧刷2.3 吸尘装置2.4 强力吸尘装置2.5 毛刷清洁装置清扫机构是清扫机器人的关键部分,直接影响到清扫效果。
圆形刷和侧刷主要用于清扫地面上的灰尘和杂物;吸尘装置则用于吸收灰尘和杂物;强力吸尘装置可以进行更深层次的清洁;毛刷清洁装置则可用于清洁刷子上积累的杂物。
3. 导航系统3.1 路径规划算法3.2 定位系统3.3 障碍物避障算法3.4 地图生成算法3.5 动态环境适应算法导航系统是清扫机器人的关键技术之一,它需要能够准确地确定位置和路径规划,以及避免障碍物。
路径规划算法可以确保机器人按照最优路径进行移动;定位系统可以准确地确定机器人的位置;障碍物避障算法可以避免机器人与障碍物的碰撞;地图生成算法可以生成清洁过程的地图;动态环境适应算法可以使机器人适应环境的变化。
4. 电源系统4.1 电池类型选择4.2 电池容量计算4.3 充电系统设计4.4 电源管理系统设计4.5 充电保护装置电源系统是清扫机器人的能源供应,其设计需要确保机器人具备足够的电量,以完成清扫任务。
清扫机器人结构设计解析清扫机器人结构设计是机器人工业中重要研究范畴之一,它将规划从总体构成到每个构件的完整性能,最终构建一台能够自主清扫安全而高效的无人清扫机器人。
清扫机器人的结构设计是基于环境地形、清扫任务、工作环境、作业需求和操纵杆等不同因素进行的,主要分为3个方面,即机构、电子控制系统和软件系统。
机构方面,清扫机器人的本体由各种模块组成,主要有底盘模块、悬挂模块、传动系统模块等。
底盘模块的结构设计至关重要,机器人的行走能力就取决于底盘的设计,它能决定机器人具备什么样的运动性能,如拐弯灵敏度、牵引力大小、抗侧偏能力等等。
悬挂模块是将底盘模块与其它模块按照相对状态安装在一起,它也起到将机器人模块结合在一起的重要作用。
悬挂模块还与机器人底盘间保持灵活性和合理的悬挂,以便在各种不同状况下有较好的擘比性。
传动系统模块是各种元件连接在一起,完成散热、传热、传递的模块,它包括机械轮系、电机传动部分等,负责机器人的行走和机构动作的操纵。
电子控制系统方面,它主要是指机器人电子系统的设计和控制,其电子组成包括中央处理器模块、传感器模块以及辅助传感器模块。
中央处理器模块主要响应机器人的计算需求,包括各种中央处理器、存储器、芯片设计等;传感器模块承担机器人环境感知的任务,如激光雷达、摄像头、温度传感器等;辅助传感器模块主要响应机器人的状态感知,如车体晃动加速度、陀螺仪、轮子倾角等。
软件系统方面,它主要是指清扫机器人软件开发系统,包括自动定位系统、多层智能控制系统等,具体有多元异构系统组合、支持双重嵌入式计算、提供灵活高可靠分布式系统架构、支持部署多种常见平台等特点。
清扫机器人结构设计不仅包含硬件部分,更重要的是要设计出一个安全高效的无人清扫机器人,模块功能要求和软件要求也非常重要,所以机器人结构设计要结合环境地形、清扫任务等因素进行设计的同时还要考虑机构模块风格要求、传动系统模块和中央处理器模块、软件系统等以构建出一台能够自主清扫安全而高效的无人清扫机器人。
家禽养殖场自动清扫机器人设计刘 娜,郭文川,张伟华,林垂涛(西北农林科技大学机械与电子工程学院,陕西杨凌 712100)摘 要:针对我国家禽养殖场清洁清扫强度大、清扫环境恶劣、劳动强度高和养殖员工对特殊气味不适应等难题,设计开发了家禽养殖场清扫机器人。
采用清扫风扇和单片机控制系统相结合的方案,实现了机器人对家禽养殖场大型障碍物进行合理躲避并对废弃物进行清扫等功能。
该机器人由移动部分、传感器和清扫3大部分构成,具有体积小、清扫效率高和造价低等优点,为我国家禽养殖业的自动清扫提供了技术支持。
关键词:家禽养殖场;清扫机器人;单片机;传感器中图分类号:S815.9;TP24 文献标识码:A文章编号:1003-188X(2009)04-0098-020 引言近年来,计算机技术与人工智能科学的飞速发展、劳动力成本的上升和人类想摆脱枯燥乏味的体力劳动的迫切愿望,促进了服务机器人技术领域的拓宽。
随着我国家禽养殖业的迅速发展,家禽养殖场的清扫卫生问题存在着强度大、环境恶劣以及清扫人员对养殖场特殊气味的不适应等一系列问题,因此设计一种机器人来代替养殖员工对家禽养殖场进行清扫具有重大的现实意义。
1 系统工作原理家禽养殖场自动清扫机器人是基于传感器技术、控制技术、机器人技术于一体的集成系统。
在本系统中,清扫机器人底盘采用两轮结构,前轮为万向轮。
仅起支撑作用,不起导向作用。
在前轮的上方,安装一个清扫风扇。
两个后轮为驱动轮,采用两轮差动转向的方式实现转向。
每一个主动轮采用一个步进电机独立驱动。
机器人通过安装机器人前方的超声波传感器来获取外界信息。
当传感器获取的障碍物体积较大时,清扫机器人实现避障;当障碍物较小时(比如动物粪便等),则利用机器人前方安装的清扫风扇进行卫生清洁。
通过清扫风扇,使动物粪便清扫到地面栅栏下的排废池。
清扫机器人系统如图1所示,主要由控制器、传感器、驱动装置和执行机构组成。
收稿日期:2008-06-11基金项目:2005 十一五 国家科技支撑计划重大项目(2006BA09B04)作者简介:刘 娜(1983-),女,陕西大荔人,硕士研究生,(E-m ail) li una418@126.co m。
一种新型水泥库清理机器人设计与优化随着水泥工业的不断发展,水泥库的清理和维护变得越来越重要。
传统的人工清理方式效率低下且存在一定的安全隐患。
设计一种新型水泥库清理机器人对于提高水泥库清洁效果和工作效率具有重要意义。
新型水泥库清理机器人应具备可靠的移动和操控能力。
机器人应配备强大的动力系统,能够在水泥库内自由行驶,并且具备远程操控功能。
可以通过遥控或程序控制机器人的移动,实现对水泥库各个区域的清理。
机器人应配备先进的传感器和导航系统。
在清理水泥库时,机器人需要能够识别和避开障碍物,同时也需要能够感知并避开边缘和深坑。
为此,机器人应配备能够实时感知环境的传感器,如激光雷达、红外线传感器等,以确保机器人在清理过程中的安全性和稳定性。
机器人还应具备清理功能。
机器人应配备清理装置,如吸尘器、刷子等,能够对水泥库内的尘土、碎片等进行清理。
清理装置应具备足够的清理能力,能够高效清理水泥库内的污垢,并具备自动清理和自动排放的功能,以提高清洁效果和工作效率。
机器人的设计还应考虑到能源消耗和维护成本。
机器人应搭载高效的电池或其他能源供应系统,以保证其长时间的运行。
机器人的结构应简单可靠,易于维护和保养,降低运营成本。
基于以上要素,可以设计一种新型水泥库清理机器人。
机器人具备移动和操控能力,配备先进的传感器和导航系统,并具备清理功能。
机器人可远程操控,通过传感器感知环境,避开障碍物和边缘,清理水泥库内的污垢,并具备自动清理和自动排放的功能。
机器人搭载高效能源供应系统,保证长时间运行,且结构简单可靠,维护成本低。