抽油机平衡 扭矩与功率计算
- 格式:pptx
- 大小:336.45 KB
- 文档页数:19
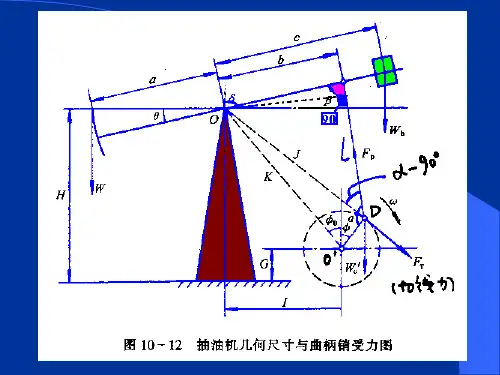
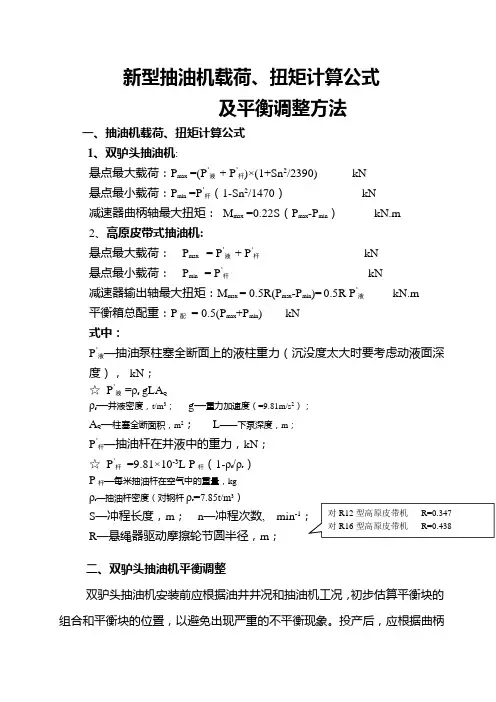
新型抽油机载荷、扭矩计算公式及平衡调整方法一、抽油机载荷、扭矩计算公式1、双驴头抽油机:悬点最大载荷:P max =(P’液+ P’杆)×(1+Sn2/2390) kN悬点最小载荷:P min =P’杆(1-Sn2/1470)kN减速器曲柄轴最大扭矩:M max =0.22S(P max-P min)kN.m2、高原皮带式抽油机:悬点最大载荷:P max= P’液+ P’杆kN悬点最小载荷:P min = P’杆kN减速器输出轴最大扭矩:M max= 0.5R(P max-P min)=0.5R P’液kN.m平衡箱总配重:P配= 0.5(P max+P min) kN式中:P’液—抽油泵柱塞全断面上的液柱重力(沉没度太大时要考虑动液面深度),kN;☆P’液=ρf gLA Qρf—井液密度,t/m3;g—重力加速度(=9.81m/s2);A Q—柱塞全断面积,m2;L——下泵深度,m;P’杆—抽油杆在井液中的重力,kN;☆P’杆=9.81×10-3L P杆(1-ρf/ρr)P杆—每米抽油杆在空气中的重量,kgρr—抽油杆密度(对钢杆ρr=7.85t/m3)ArrayS—冲程长度,m;n—冲程次数, min-1R—悬绳器驱动摩擦轮节圆半径,m;二、双驴头抽油机平衡调整双驴头抽油机安装前应根据油井井况和抽油机工况,初步估算平衡块的组合和平衡块的位置,以避免出现严重的不平衡现象。
投产后,应根据曲柄轴实际净扭矩情况,调整平衡,以保证抽油机在最佳状态下工作,现介绍两种平衡调整的计算方法。
1、安装前初步估算平衡(1)估算所需的平衡力矩M平(据已有数据选用三式之一)M平=0.47×(P'杆-B+P'液/2)×S千牛吨·米M平=0.235×S×(Pmax+Pmin)千牛吨·米M平=0.51×(|M上max|+|M下min|)千牛吨·米式中:P'杆——抽油杆在油液中的重量(千牛吨)P'液——动液面以上,泵柱塞全断面上液柱的重量(千牛吨)S——所用冲程长度(米)M上max,M下min分别为上、下冲程悬点负荷在曲柄轴上产生的载荷扭矩代数和的最大、最小值(千牛顿·米)P′杆=q′LP′液=r·F·e·g Pmax·M上max=[Pmax -B]·TF100·M下min=[Pmin -B]·TF280·式中:q′—每米抽油杆在油液中的重量(千牛顿)L—泵挂深度(米)r—油液密度(千克/米3)e—动液面至井口的深度(米)F—泵柱塞断面积(米2)g—重力加速度值:取g=9.8米/秒2B—抽油机结构不平衡力(千牛顿),查抽油机铭牌或说明书的平衡力矩图解。
游梁式抽油机调平衡三种方法的计算与比较摘要:目前江汉采油厂98%以上的油井,采用的是机械采油,而其中90%以上的机采井,使用的是游梁式抽油机(以下简称抽油机)。
确保抽油机在平衡状态下工作,不仅仅可以节约大量能耗,而且可以延长抽油机设备的寿命,优化井下工况,间接提高油井产量。
因此调整抽油机平衡是各采油站日常设备管理中的重点工作。
抽油机调平衡大致可分为电流法、电能法、示功图法、功率法、扭矩法。
本文提供了常用的电流法、扭矩法和功率法三种方法的计算和比较。
关键词:游梁式抽油机;平衡;电流法;扭矩法;功率法1、抽油机平衡基本原理、定义及判断抽油机下冲程过程中悬点载荷以及电动机所做的功储存起来,下冲程储存的能量释放出来帮助电动机带动悬点运动做功。
这就是抽油机平衡的基本原理。
根据《QSY1233-2009游梁式抽油机平衡及操作规范》中对抽油机的平衡状态的描述:指抽油机减速器扭矩最小的状态,也就是减速器扭矩均方值最小的状态,或者上、下冲程中减速器扭矩峰值最小的状态。
通俗地说抽油机平衡必然满足上、下冲程电机做功相等。
而抽油机在日常生产中由于自身的工况特点,其驴头悬点承受交变载荷,上冲程,抽油机驴头承受抽油泵活塞截面以上液体、抽油杆柱自身的重量、以及惯性、摩擦、振动等负荷。
下冲程时,抽油机驴头仅承受抽油杆柱在井液中的重量及少量的摩擦、惯性等负荷。
其上、下冲程负荷差别非常大,抽油机无法正常运行,为了保证抽油机正常运行,通常采用游梁平衡、曲柄平衡、复合平衡、气动平衡的方法。
而对大型抽油机常用曲柄平衡(本文所讲到平衡调整所针对的就是曲柄平衡游梁抽油机)。
对于是否平衡,判断主要依据有观察法、上下冲程时间法、电流法、扭矩法、功率法等,观察法、上、下冲程时间法虽可粗略地判断抽油机是否平衡,但无法给出调整平衡的具体数值。
电流法、扭矩法、功率法不仅能计算出当前抽油机的平衡率,而且还可以算出达到平衡条件所需要移动平衡块的距离,在现场得到广泛运用。
游梁式抽油机井效率分析与平衡优化软件的功能规划和计算模型一、软件实现的功能(1)示功图、电流、功率等数据的采集,电参数等曲线的实时显示;(2)抽油机井系统效率计算分析;(3)抽油机平衡状态诊断与平衡调节;二、软件结构1、抽油机井示功图分析从示功图取点求得产液量、上下冲程时间、平均载荷,最大、最小载荷,冲程,冲次、功图面积、工况分析。
(分析示功图,得到计算系统效率及调平衡所需要的重要数据)由示功图推算上下冲程时间的方法: 抽油机一个冲程周期的计算公式:60T n;n 为冲次上冲程和下冲程的具体时间,根据示功图上位移点进行推导,判断准则是: 上冲程判断准则:如果(If )某一点的位移为最小,那么(Then )该点为上冲程起点。
(若位移为最小的点有多点,以首次出现的最小点为准);如果(If )某一点位移为最大,那么(Then )该点为上冲程结束点。
(若位移为最大的点有多个,以首次出现的位移最大点为准)。
计算从首次出现最小点到首次出现位移最大点的点数和,此值与示功图总点数的比值,再与一个冲程周期相乘,即为上冲程时间。
设总数是N ,推算得到的上冲程点数为n 上,下冲程点数为n 下,上冲程时间为:n t T N =⨯上上, t T t =-下上平均载荷的计算是利用仪器采集的各点的载荷的平均值, 其他的参数利用已有软件即可得到。
2、电参数曲线分析电流、电压、有功功率、功率因数曲线显示,上冲程最大电流、下冲程最大电流,上冲程最大功率、下冲程最大功率,最大功率对应曲柄转角的数值显示;三、系统效率及功率的计算分析1、有效功率计算将井内液体输送到地面所需要的功率为机械采油井的有效功率 ① 已知数据:实际产液量Q ,m 3/d (调用示功图分析里的数据); 含水率wf ,%(已知数据);油的密度0ρ,t/ m 3(已知数据);水的密度w ρ,t/m 3(已知数据)。
井液密度ρ,t/m 3(若不能测得,利用()ow w w f f ρρρ-+=1计算);重力加速度g (=9.81),m/s 2;动液面深度H ,m (采用软件中的数据);油压p t ;套压pc,Mpa (传感器测量得到的数据);抽油机系统的有效功率86400Q gP ρ⨯⨯=⨯有效(()1000t c p p H g ρ-⨯+⨯)2、抽油机井系统的输入功率拖动抽油机的电机输入功率为抽油机输入功率。

游梁式抽油机井效率分析与平衡优化软件的功能规划和计算模型一、软件实现的功能(1)示功图、电流、功率等数据的采集,电参数等曲线的实时显示;(2)抽油机井系统效率计算分析;(3)抽油机平衡状态诊断与平衡调节;二、软件结构1、抽油机井示功图分析从示功图取点求得产液量、上下冲程时间、平均载荷,最大、最小载荷,冲程,冲次、功图面积、工况分析。
〔分析示功图,得到计算系统效率及调平衡所需要的重要数据〕由示功图推算上下冲程时间的方法: 抽油机一个冲程周期的计算公式:60T n;n 为冲次上冲程和下冲程的具体时间,根据示功图上位移点进行推导,判断准则是: 上冲程判断准则:如果〔If 〕某一点的位移为最小,那么〔Then 〕该点为上冲程起点。
〔假设位移为最小的点有多点,以首次出现的最小点为准〕;如果〔If 〕某一点位移为最大,那么〔Then 〕该点为上冲程结束点。
〔假设位移为最大的点有多个,以首次出现的位移最大点为准〕。
计算从首次出现最小点到首次出现位移最大点的点数和,此值与示功图总点数的比值,再与一个冲程周期相乘,即为上冲程时间。
设总数是N ,推算得到的上冲程点数为n 上,下冲程点数为n 下,上冲程时间为:n t TN =⨯上上, t T t =-下上 平均载荷的计算是利用仪器采集的各点的载荷的平均值, 其他的参数利用已有软件即可得到。
2、电参数曲线分析电流、电压、有功功率、功率因数曲线显示,上冲程最大电流、下冲程最大电流,上冲程最大功率、下冲程最大功率,最大功率对应曲柄转角的数值显示;三、系统效率及功率的计算分析1、有效功率计算将井内液体输送到地面所需要的功率为机械采油井的有效功率 ① 已知数据:实际产液量Q ,m 3/d 〔调用示功图分析里的数据〕;含水率w f ,%〔已知数据〕;油的密度0ρ,t/ m 3〔已知数据〕;水的密度w ρ,t/m 3〔已知数据〕。
井液密度ρ,t/m 3〔假设不能测得,利用()ow w w f f ρρρ-+=1计算〕;重力加速度g 〔〕,m/s 2;动液面深度H ,m 〔采用软件中的数据〕;油压p t ;套压pc,Mpa 〔传感器测量得到的数据〕;抽油机系统的有效功率86400Q gP ρ⨯⨯=⨯有效〔()1000t c p p H g ρ-⨯+⨯〕2、抽油机井系统的输入功率拖动抽油机的电机输入功率为抽油机输入功率。