一种磁阻式电子罗盘的开发
- 格式:pdf
- 大小:1.95 MB
- 文档页数:2
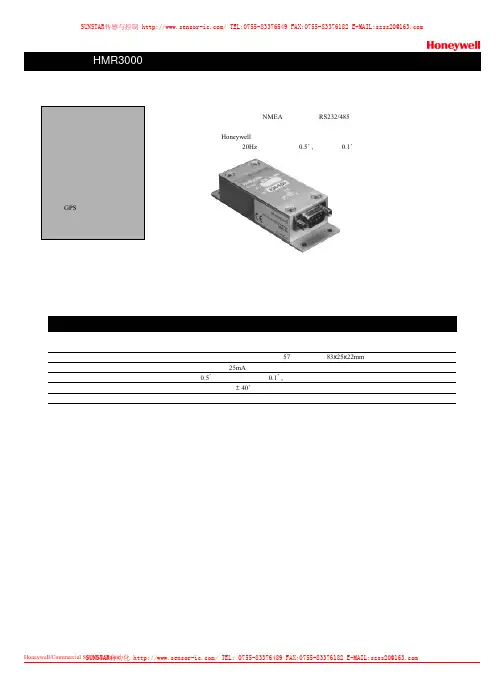
电子罗盘模块按照NMEA格式,通过RS232/485串口提供航向输出(横滚、俯仰、偏航)采用Honeywell公司的固态磁阻传感器,具有快速的响应时间至20Hz,航向精度为0.5˚ ,分辨率为0.1˚。
快速响应时间小体积低功耗高精度宽的倾斜角度对铁磁物性金属进行补偿使用固态磁传感器提高了响应速度,和万向架固定式的磁通门传感器相比提高了数据更新速度。
仅为一块线路板,重量小于57克,体积为83x25x22mm,铝外壳封装。
功耗小于25mA,可长时间电池供电0.5˚ 航向精度,分辨率0.1˚ ,可适用于严格定向的应用场合。
倾斜角度为±40˚ ,适合于广泛的要求精确的应用通过对因环境中存在铁磁性金属而对地磁场造成的扭曲的补偿,提高精度。
下表显示,9针插头引脚排列,电源可以为调制的5V ,或不调制6—15V ,只有#9针或#8针中的一个,可由给定连接方法连接。
见以下:接口信号描述通信HMR3000 用简单的ASCII 字符与外部主控制器,通过 RS-232 或 RS-485 通讯。
ASCll 码的发送和接收,使用1个起始位,8个数据位(先是LSB,MSB 总为0) ,无奇偶位,和一个停止位,波特率可设置为1200,2400,4800,9600,19200或38400,HMR3000 对所有收到的带校验码的有效输入作反应。
罗盘输出HMR3000输出三种NMEA 标准格式(HDG,HDT 和XDR),三种专用格式(HPR,RCD 和CCD),及一个 ASCll 码航向输出,用于数据显示。
HDG,HDT 和HPR 是最通用格式。
$HCHDG 航向、偏差角、磁偏角$HCHDG, 85.5, 0.0, E, 0.0, E*77$HCHDT,航向、对(True)$HCHDT,271.1,T*2C$PTNTHPR,航向、俯仰和横滚$PTNTHPR,Heading,Heading Status,Pitch,Pitch Status,Roll,Roll Status*hh<cr><lf>$PTNTHPR,85.9,N,-0.9,N,0.8,N*2C名称TxD/B RxD/A GND 6-15V 5VOper/Calib(2)Run/Stop(2)Ready/Sleep(2)Cont/Reset(2)入/出Out In In In In In In In In引脚235981647描述RS-232 发送/ RS-485RS-232 接收 / RS-485电源/信号地未调理的电源电压输入调理的电源电压输入Operate/Calibrate (3) input (open=Operate)Run/Stop (3) input (open=Run)Ready/Sleep (3) input(open=Ready)Continue/Reset (3) input (open=Continue)(典型值)---6-155 ± 5%0-50-50-50-5(最小值)(1)-18-1800-20-20-20-20单位Vdc VdcVdc Vdc Vdc Vdc Vdc Vdc(最大值)(1)1818307.520202014(1) 绝对最大值(2) 沉电流:200µA (典型值), 400mA(最大值)(3) 开路输入 =高电平HMR3000 连线图——计算机RS232 到 HMR3000订货指南HMR3000-Demo-232*.....RS232HMR3000-D00-232..........RS232.........NoneHMR3000-D21-232..........RS232.........Extended BaseHMR3000-D00-485..........RS485.........NoneHMR3000-D21-485..........RS485.........Extended Base*Development Kit includes one module in alu minum enclosure, cablingwith power supply, demonstration software for PC running Windows™and User’s Manual.数值<0.5˚<1.5˚± 0.3˚0.1˚degrees/mils ±40˚±0.4˚±0.6˚±0.2˚0.1˚degree/mils ±1.0 Gauss (最大值)1 mGauss 5.0 Vdc 调理电压6~15Vdc 未调理电压35 mA@6 Vdc13 mA 2.0 mA RS-232RS-4851200 to 38400 bps NMEA 0183连续滤波0.75 oz (22g)3.25 oz (92g)1.2 x 2.95 x 0.7601.5 x 4.2 x 0.88-20 to 70˚C -35 to 100˚C 30 英寸高落下20~2000Hz Random 2 hrs/axisIPC6012IPC610航向角俯仰和横滚磁场电气接口物理环境制造指标1. 航向精度是假设地球磁体只有硬铁干扰,已通过标定进行补偿2. 标定值3. 由设计参数保证4. 典型5. 迟到或超过*器件方向角不超过75˚在工作或贮存时——可引起短暂的精度损失。
基于隧道磁阻传感器的三维电子罗盘设计∗王琪;李孟委;王增跃;蒋孝勇;李锡广【摘要】Existing electronic compass is vulnerable to be distracted by the Magnetic Field in external environment, which leads to low accuracy. To solve this problem,a three-dimensional electronic compass is designed based on Tunneling Magneto Resistance sensor and a prototype is made. The error characteristics of compass in a real envi-ronment is studied,and ellipse hypothesis are carried out to compensate the azimuth error after ellipsoid-fitting cor-rection. Through experimental tests,the compensation effect of the ellipse hypothesis method,which compensated az-imuth accuracy of up to 0.85° and effectively reducing 94.81% of the azimuth error. Experimental results show that applying TMR sensor to electronic compass is feasible.%针对现有电子罗盘在地磁场检测时易受到外界磁场干扰而导致测量精度不高的问题,设计了基于隧道磁阻传感器( TMR)的三维电子罗盘并完成样机制作。
题目基于单片机的电子指南针设计学生姓名学号所在学院专业班级指导教师完成地点2017 年6月3日毕业论文﹙设计﹚任务书院(系) 物理与电信工程学院专业班级通信1103班学生姓名王婷婷一、毕业论文﹙设计﹚题目基于单片机的电子指南针设计二、毕业论文﹙设计﹚工作自止三、毕业论文﹙设计﹚进行地点: 物理与电信工程学院实验室四、毕业论文﹙设计﹚的内容要求:指南针是一种重要的导航工具,可应用在多种场合中。
电子指南针内部结构固定,没有移动部分,可以简单地和其它电子系统接口,因此可代替旧的磁指南针。
并以精度高、稳定性好等特点得到了广泛运用。
本课题具体要求如下:1. 熟悉指南针的工作原理;2. 选择合适的电磁感应器进行系统设计,完成显示功能;3. 能够利用电池对系统供电,系统集成,完成功能调试。
成果形式:实验样机一套。
毕业设计进度安排: 1.10─3.20:查阅资料(参考文献不少于10篇),进行方案论证,完成开题报告。
完成不少于3000字的外文翻译;3.20─4.30:设计硬件电路,编写相关软件、完成电路仿真及样机调试;5.1─5.20:完善系统调试,撰写论文,准备毕业设计验收等工作;5.21-6.10:整理资料,修改论文,准备毕业答辩。
指导教师系(教研室)通信教研室系(教研室)主任签名批准日期接受论文 (设计)任务开始执行日期学生签名基于单片机的电子指南针设计王婷婷(陕西理工学院物理与电信工程学院通信1103班,陕西汉中 723003)指导教师:郑争兵[摘要]指南针是用以判别方位的一种简单仪器,是一种重要的导航工具,可应用在多种场合中。
当人们置于一个陌生的环境中,导航定向非常重要,随着手机的普及,其内置指南针已被人们广泛应用,但是一旦出现手机无电以及信号不强时无法定位。
针对这一问题,因此开发一款基于单片机的低成本便于携带的电子指南针系统,以满足人们的精确定向。
此次设计的原理是通过STC89C52单片机处理异性磁阻(AMR)传感器芯片HMC5883L得到的信息数据,最终在LCD1602液晶上显示数据,得到当前的角度信息与方位信息。
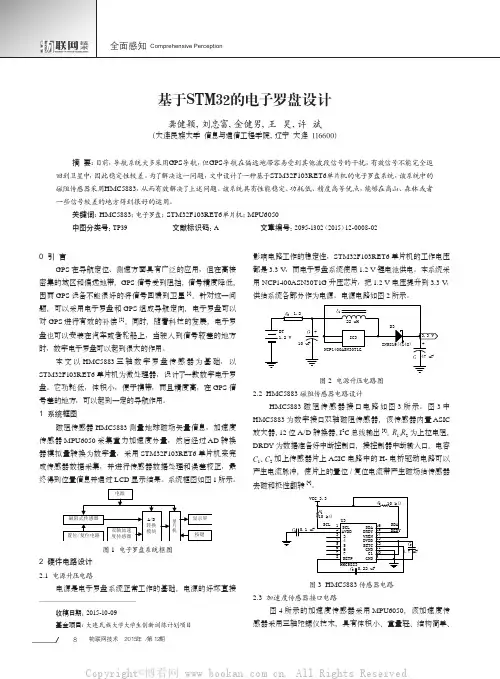
基于STM32电子指南针的设计摘要对于电子指南针而言,其不仅仅在我们的日常生活中非常的普遍,而且在在航海、工业等领域中发挥巨大作用,因此未来的市场前景非常的理想。
本论文在设计电子指南针的过程中,其电子控制系统的核心采用的是 stm32 单片机自动控制系统,具体分析是指,借助于先进的磁场传感器,勘测并且获取所在地位和区域的磁场强度,依据勘测的相关数据,同时结合设定好的磁场数据,换算出角度,同时结合实际情况的强度变化,平衡偏差,进而获取现有的位置数据。
电子指南针主要STM32F103C8T6单片机、LCD1602液晶显示、GY-271模块及电压组成。
指南针模块电路把磁场信号转化为电信号,电信号经过放大电路,整流电路等处理,数字信号经过主控芯片的处理送入LCD显示.在本文的研究过程中,探讨利用stm32 单片机的方式实现电子指南针的功能,并通过仿真验证该高能。
本系统的设计优势是指,指南针的结构非常普通、性价比高,同时有非常高的精度,可以便利的检测说的所在的角度和位置,因此有很高的运用价值,可以大范围的推广使用。
关键词:stm32单片机;磁场; 电子指南针;转化;精度第1章绪论1.1 背景的简述指南针作为辨别方向用的仪器,其是凝结了中国劳动人民的伟大发明。
最开始它称之为司南,其最初的原理是在地球磁场中,结合天然磁石进行方向指示,其在航海等相关活动中起到了引导方向的作用。
不过指南针随着时代的发展,为了更好满足人们的需求,对其制作技艺有更好的要求,同时对精度也有更高的要求。
在这个时代的指南针的本质原来没区别,但是现有的机械指南针,不管是便携度,还是灵敏度都有待改进。
历经半个世纪的发展,不仅仅电子科技快速发展,同时设备也逐步实现智能化、自动化。
对于指南针而言,在原有的机械化指南针的基础上,充分利用磁场的传感器等技术作用下逐步发展成电子式,使得电子指南针的使用便利性更强,而且进度更有保证。
依据磁场的传感器,结合地球的电磁场的方向,主要包含了霍尔效应式,磁通门式还有磁阻效应式等三种类型。
Hot-Point Perspective热点透视DCW151数字通信世界2019.07罗盘,在我国又被称为指南针,又名罗经仪,在近代主要用于航海,对于新大陆的发现和全球化运动发挥了重要作用。
然而在今天的工业和社会生活中,罗盘主要用来导航。
GPS 也也就是全球卫星定位系统,是目前使用最广的一种导航定位手段,但是它的信号经常被地形和地面的物体所阻挡,使得精度大幅度降低,特别是在植物茂密的森林和高楼林立的城市地区,GPS 信号的实用性仅有60%。
定位结果误差较大将导致设备无法正常工作。
电子罗盘是一种能探测航向角或其他的姿态的装备,该装备在日常生活中发挥着很重要的作用,它应用了地磁场和重力加速度电子罗盘结合GPS ,能有效弥补GPS 的缺陷,实现复杂地形环境下的精确定位导航。
因此,本文介绍了一种基于磁阻传感器HMC1022的电子罗盘的基本测量原理和误差分析。
1 地磁场简介和测量原理外源变化磁场、地核主磁场、感应磁场,以上四种磁场大体组成了地磁场。
地核主磁场所占的比重最大,百分比是95%;感应磁场以及外源变化磁场占的比重最少,仅仅只有1%;地核磁场所占的比重稍微比感应磁场多一些,高出3%,比重为4%。
我们可以设想地球内部存在一磁铁,磁铁的中心正好和地心相重合。
这样,无论在地球内部或是外部都存在许多的磁力线,在地球内部线从地球北极出发指向南极,在地球外部南极发出磁力线,最终都回到北极。
地磁场存在于三维空间内,是一个矢量场。
为了形容地磁场的散布特征,可以把观测点作为原点建立一个三维坐标系,该坐标系的三个轴x 、y 、z 轴的正向分别代表的方向是:地球的北方向、地球的东方向、在观测点处垂直向下的方向。
Z 、X 、Y 是三个磁场分量,Z 是垂直向下的,X 是指向北方向的、Y 是指向东方向的。
磁倾角、水平强度、磁偏角、总强度称为四要素,该四要素在地磁场的研究中发挥着不可替代的作用。
其中,I 表示磁倾角,该夹角存在于水平面与总矢量之间;H 是水平强度,它是地磁场的水平分量;D 表示磁偏角,存在于地球正北方向和H 之间。
电子罗盘的工作原理及校准方法ST集成传感器方案实现电子罗盘功能电子罗盘是一种重要的导航工具,能实时提供移动物体的航向和姿态。
随着半导体工艺的进步和手机操作系统的发展,集成了越来越多传感器的智能手机变得功能强大,很多手机上都实现了电子罗盘的功能。
而基于电子罗盘的应用(如Android的Skymap)在各个软件平台上也流行起来。
要实现电子罗盘功能,需要一个检测磁场的三轴磁力传感器和一个三轴加速度传感器。
随着微机械工艺的成熟,意法半导体推出将三轴磁力计和三轴加速计集成在一个封装里的二合一传感器模块LSM303DLH,方便用户在短时间内设计出成本低、性能高的电子罗盘。
本文以LSM303DLH为例讨论该器件的工作原理、技术参数和电子罗盘的实现方法。
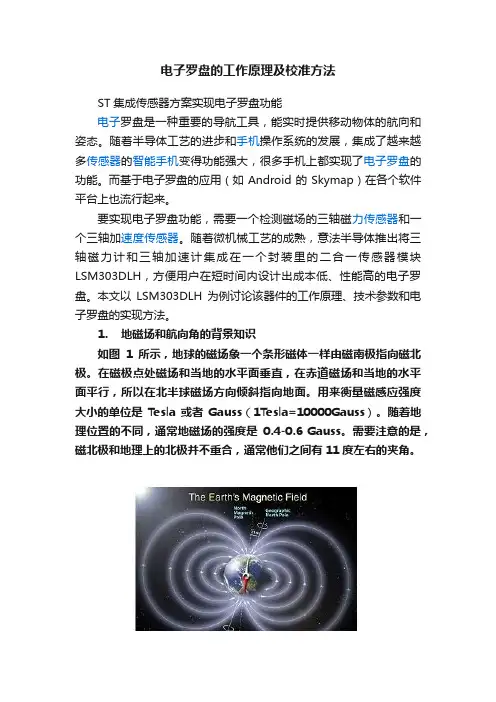
1. 地磁场和航向角的背景知识如图1所示,地球的磁场象一个条形磁体一样由磁南极指向磁北极。
在磁极点处磁场和当地的水平面垂直,在赤道磁场和当地的水平面平行,所以在北半球磁场方向倾斜指向地面。
用来衡量磁感应强度大小的单位是Tesla或者Gauss(1Tesla=10000Gauss)。
随着地理位置的不同,通常地磁场的强度是0.4-0.6 Gauss。
需要注意的是,磁北极和地理上的北极并不重合,通常他们之间有11度左右的夹角。
图1 地磁场分布图地磁场是一个矢量,对于一个固定的地点来说,这个矢量可以被分解为两个与当地水平面平行的分量和一个与当地水平面垂直的分量。
如果保持电子罗盘和当地的水平面平行,那么罗盘中磁力计的三个轴就和这三个分量对应起来,如图2所示。
图2 地磁场矢量分解示意图实际上对水平方向的两个分量来说,他们的矢量和总是指向磁北的。
罗盘中的航向角(Azimuth)就是当前方向和磁北的夹角。
由于罗盘保持水平,只需要用磁力计水平方向两轴(通常为X轴和Y轴)的检测数据就可以用式1计算出航向角。
当罗盘水平旋转的时候,航向角在0?- 360?之间变化。
2.ST集成磁力计和加速计的传感器模块LSM303DLH2.1 磁力计工作原理在LSM303DLH中磁力计采用各向异性磁致电阻(Anisotropic Magneto-Resistance)材料来检测空间中磁感应强度的大小。
本科毕业论文( 届)题目:基于STM32 ARM的嵌入式磁航向测量软件设计学院:_____________________________专业:_____________________________班级:_____________________________姓名:_____________________________学号:_____________________________指导老师:_____________________________完成日期:_____________________________物理与电子信息工程学院本科毕业设计(论文)诚信承诺书1、本人郑重地承诺所呈交的毕业设计(论文),是在指导教师老师的指导下严格按照学校和学院有关规定完成的。
2、本人在毕业论文(设计)中引用他人的观点和参考资料均加以注释和说明。
3、本人承诺在毕业论文(设计)选题和研究过程中没有抄袭他人研究成果和伪造相关数据等行为。
4、在毕业论文(设计)中对侵犯任何方面知识产权的行为,由本人承担相应的法律责任。
毕业论文(设计)作者签名:班级:学号:年月日目录摘要 (I)Abstract (II)1 引言 (1)1.1 课题背景与意义 (1)1.1.1 课题背景............................................................................. 错误!未定义书签。
1.1.2...课题意义................................................................. ........... 错误!未定义书签。
1.2磁阻传感器在导航系统中的应用. (4)1.31.4 本课题的主要研究内容 (4)1.5 论文组织结构 (5)2 论文模板使用说明 (7)2.1 标题的使用 (7)2.2 二级标题的使用 (9)2.3 图编号与引用 (10)2.3.2 图编号的引用 (10)2.3.3 引用编号的更新 (10)2.4 表格使用 (11)2.5 参考文献说明 (11)2.6 公式的使用 (12)3 xxx硬件设计 (13)3.1 方案论证 (13)3.1.1 常用方案比较 (13)3.2 本课题采用方案 (13)3.3 硬件仿真 (13)4 xxx软件设计 (14)4.1 软件设计框架 (14)4.2 算法分析与实现 (14)5 测试结果及分析 (15)6 结论与展望 (16)致谢 (17)参考文献 (18)附件1 程序代码 (19)摘要关键词4个左右,每个关键词用中文的分号“;”隔开,最后一个关键词不用分号。
基于磁电阻传感器的电子罗盘研制
白雪;姜庆;刘有彬;张志红;彭根斋
【期刊名称】《磁性材料及器件》
【年(卷),期】2022(53)3
【摘要】基于磁电阻传感器设计了一款电子罗盘,其硬件电路包括地磁信息及姿态信息采集电路、信号放大滤波电路、模数转换电路等;在电子罗盘硬件电路设计完成的基础上,基于MDK-ARM开发环境,进行软件部分设计。
其主要功能包括:控制AMR对磁电阻传感器和三轴加速度计的数据进行采集和处理;对数据进行补偿校准和方位角解算;将数据传输至上位机中进行显示和存储。
经实际测量,在倾角不大于30°时,方位角精度可达1°,实现了输出高精度方位角的目标。
【总页数】6页(P86-91)
【作者】白雪;姜庆;刘有彬;张志红;彭根斋
【作者单位】中国电子科技集团第九研究所;联合微电子中心有限责任公司
【正文语种】中文
【中图分类】TP212.1
【相关文献】
1.基于磁感式和MEMS加速度传感器的电子罗盘设计
2.基于电阻应变式传感器的电子天平的研制
3.基于MM212XMG磁传感器的电子罗盘设计
4.基于巨磁电阻的电子罗盘研制
5.基于磁阻传感器的带倾斜补偿的电子罗盘的研制
因版权原因,仅展示原文概要,查看原文内容请购买。