第1章 控制系统的基本概念
- 格式:ppt
- 大小:1.63 MB
- 文档页数:34

工程控制原理- 章云
一、控制系统的基本概念
1.1 控制系统的定义与分类
1.2 控制系统的发展历程与重要性
二、控制系统的数学模型
2.1 线性微分方程
2.2 传递函数与方块图
2.3 状态空间模型
三、控制系统的时域分析
3.1 稳定性分析
3.2 动态响应分析
3.3 稳态误差分析
四、控制系统的频域分析
4.1 频率特性
4.2 Nyquist图与Bode图
4.3 稳定性分析
4.4 性能指标估算
五、控制系统的稳定性分析
5.1 稳定性定义与条件
5.2 稳定性判据
5.3 不稳定性的影响与处理方法
六、控制系统的误差分析
6.1 误差定义与分类
6.2 误差传递与控制精度分析6.3 减小误差的方法与途径
七、控制系统的优化设计
7.1 最优控制问题概述
7.2 线性二次型最优控制问题7.3 极小值原理及其应用
7.4 动态规划及其应用
八、控制系统的工程实现
8.1 控制系统的硬件实现8.2 控制系统的软件实现8.3 控制系统的调试与维护。

上篇自动控制原理第一章自动控制系统概述本章要点本章简要介绍有关自动控制的基本概念、开环控制和闭环控制的特点、自动控制系统的基本组成和分类以及对自动控制系统的基本要求。
第一节自动控制的基本概念自动控制是指在没有人的直接干预下,利用物理装置对生产设备和工艺过程进行合理的控制,使被控制的物理量保持恒定,或者按照一定的规律变化。
自动控制系统则是为实现某一控制目标所需要的所有物理部件的有机组合体。
在自动控制系统中,被控制的设备或过程称为被控对象或对象;被控制的物理量称为被控量或输出量;决定被控量的物理量称为控制量或给定量;妨碍控制量对被控量进行正常控制的所有因素称为扰动量。
扰动量按其来源可分为内部扰动和外部扰动。
给定量和扰动量都是自动控制系统的输入量。
通常情况下,系统有两种外作用信号:一是有效输入信号(以下简称输入信号),二是有害干扰信号(以下简称干扰信号)。
输入信号决定系统被控量的变化规律或代表期望值,并作用于系统的输入端。
干扰信号是系统所不希望而又不可避免的外作用信号,它不但可以作用于系统的任何部位,而且可能不止一个。
由于它会影响输入信号对系统被控量的有效控制,严重时必须加以抑制或补偿。
第二节开环控制和闭环控制自动控制有两种基本的控制方式:开环控制和闭环控制。
与这两种控制方式对应的系统分别称之为开环控制系统和闭环控制系统。
一、开环控制系统开环控制系统是指系统的输出端和输入端不存在反馈关系,系统的输出量对控制作用不发生影响的系统。
这种系统既不需要对输出量进行测量,也不需要将输出量反馈到输入端与输入量进行比较,控制装置与被控对象之间只有顺向作用,没有反向联系。
电加热系统的控制目标是,通过改变自耦变压器滑动端的位置,来改变电阻炉的温度,并使其恒定不变。
因为被控制的设备是电阻炉,被控量是电阻炉的温度,所以该系统可称为温度控制系统,如图1-1所示。
开环控制系统的优点是系统结构和控制过程简单,稳定性好,调试方便,成本低。
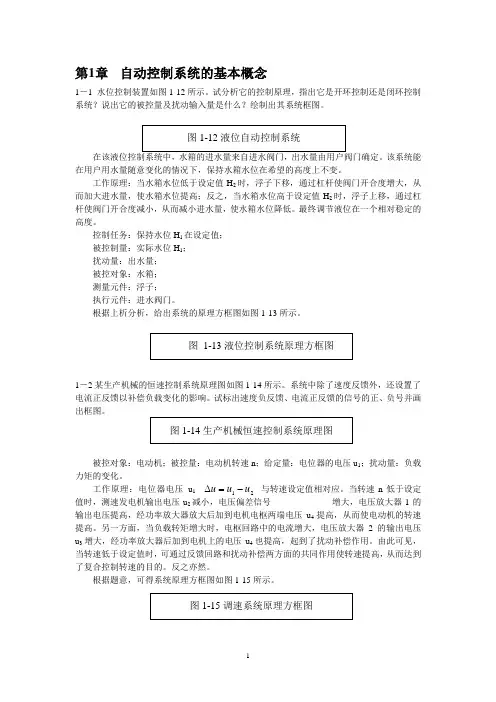
第1章 自动控制系统的基本概念1-1 水位控制装置如图1-12所示。
试分析它的控制原理,指出它是开环控制还是闭环控制系统?说出它的被控量及扰动输入量是什么?绘制出其系统框图。
在该液位控制系统中,水箱的进水量来自进水阀门,出水量由用户阀门确定。
该系统能在用户用水量随意变化的情况下,保持水箱水位在希望的高度上不变。
工作原理:当水箱水位低于设定值H 2时,浮子下移,通过杠杆使阀门开合度增大,从而加大进水量,使水箱水位提高;反之,当水箱水位高于设定值H 2时,浮子上移,通过杠杆使阀门开合度减小,从而减小进水量,使水箱水位降低。
最终调节液位在一个相对稳定的高度。
控制任务:保持水位H 1在设定值;被控制量:实际水位H 1;扰动量:出水量;被控对象:水箱;测量元件:浮子;执行元件:进水阀门。
根据上析分析,给出系统的原理方框图如图1-13所示。
1-2某生产机械的恒速控制系统原理图如图1-14所示。
系统中除了速度反馈外,还设置了电流正反馈以补偿负载变化的影响。
试标出速度负反馈、电流正反馈的信号的正、负号并画出框图。
被控对象:电动机;被控量:电动机转速n ;给定量:电位器的电压u 1;扰动量:负载力矩的变化。
工作原理:电位器电压u 1与转速设定值相对应。
当转速n 低于设定值时,测速发电机输出电压u 2减小,电压偏差信号 增大,电压放大器1的输出电压提高,经功率放大器放大后加到电机电枢两端电压u 4提高,从而使电动机的转速提高。
另一方面,当负载转矩增大时,电枢回路中的电流增大,电压放大器2的输出电压u 3增大,经功率放大器后加到电机上的电压u 4也提高,起到了扰动补偿作用。
由此可见,当转速低于设定值时,可通过反馈回路和扰动补偿两方面的共同作用使转速提高,从而达到了复合控制转速的目的。
反之亦然。
根据题意,可得系统原理方框图如图1-15所示。
21u u u -=∆1-3图1-16所示为一温度控制系统的原理图。
指出系统的输入量、被控量和控制原理,并画出系统框图。
(一)基本概念第一章1、什么是计算机控制系统?与传统的控制系统相比,计算机控制系统的优点是什么?答:计算机控制系统:用计算机代替常规控制系统中的模拟控制器对系统进行控制的系统。
优点:具有精度高速度快、存储容量大和逻辑判断功能,看完实现高级复杂的控制方法,获得快速静谧的控制效果。
2、简述计算机控制系统的硬件组成和各自的功能。
答:计算机控制系统的硬件一般由主机、接口和输入/输出通道、通用外部设备、执行机构、检测元件、仪表、操作台等部分组成。
主机:采用一台或多台计算机,通过接口和I/O口通道,接收检测设备传来的信息并向控制系统的各个部件发出命令,同时计算机对系统的各个参数进行巡回检测、数据处理、控制计算、分析报警、逻辑判断等。
接口与I/O通道:主机与被控对象之间进行信息交换的纽带。
通用外部设备:扩大计算机的功能,是计算机系统与操作人员的交互界面,用来完成信息的记录、存储、显示、打印、传送。
检测元件、仪表、执行机构:检测元件和仪表用来测量生产对象的某些参数,并将非电量的被测参数转换为电量表示;执行机构接受CPU的命令使被控对象完成规定的控制动作。
操作台:用来实现人机之间的交互功能。
3、计算机控制系统应当有哪些主要特征?答:1.实时性 2.良好的输入/输出能力 3.标准化和系列化 4.模块化的系统结构 5.可靠性(平均无故障时间、抗干扰能力强、具有定时自动启动功能和硬件自检功能)4、计算机控制系统大致可分为哪几类?简述各类计算机控制系统的结构和特点。
答:计算机控制系统大致可分为以下五类:1)数据采集系统(DAS,Data Acquision System)2)直接数字控制系统(DDC,Direct Digital Control)3)计算机监督系统(SCC,Supervisory Computer Control)4)分布式控制系统(DCS,Distributed Control System)5)现场总线控制系统(FCS,Fieldbus Control System)1)数据采集系统简称:DAS计算机只对控制系统的参数进行采集、加工和分析处理,并将处理后的数据输出。
自动控制原理总经典总结《自动控制原理》总复习控制线性非线连续离散描述函相平面建模-时域法串联(频率法)建模-求稳定性负倒描述函数曲线自振点振幅、频绘制相求奇点和极限环求运动校正第一章 自动控制的基本概念一、学习要点1. 自动控制基本术语:自动控制、系统、自动控制系统、被控量、输入量、干扰量、受控对象、控制器、反馈、负反馈控制原理等。
2. 控制系统的基本方式:①开环控制系统;②闭环控制系统;③复合控制系统。
3. 自动控制系统的组成:由受控对象和控制器组成。
4. 自动控制系统的类型:从不同的角度可以有不同的分法,常有:恒值系统与随动系统;线性系统与非线性系统;连续系统与离散系统;定常系统与时变系统等。
5. 对自动控制系统的基本要求:稳、快、准。
6. 典型输入信号:脉冲、阶跃、斜坡、抛物线、正弦。
二、基本要求1. 对反馈控制系统的基本控制和方法有一个全面的、整体的了解。
2. 掌握自动控制系统的基本概念、术语,了解自动控制系统的组成、分类,理解对自动控制系统稳、准、快三方面的基本要求。
3. 了解控制系统的典型输入信号。
4. 掌握由系统工作原理图画方框图的方法。
三、内容结构图自动控制的由系统工作原对控制系统常用术语、基本控反馈控制系控制系控制系四、知识结构图第二章 控制系统的数学模型一、学习要点1.数学模型的数学表达式形式(1)物理系统的微分方程描述;(2)数学工具—拉氏变换及反变换; (3)传递函数及典型环节的传递函数;(4)脉冲响应函数及应用。
2.数学模型的图形表示(1)结构图及其等效变换,梅逊公式的应用;(2)信号流图及梅逊公式的应用。
二、基本要求1、正确理解数学模型的特点,对系统的相似性、简化性、动态模型、静态模型、输入变 量、输出变量、中间变量等概念,要准确掌握。
2、了解动态微分方程建立的一般方法及小偏差线性化的方法。
3、掌握运用拉氏变换解微分方程的方法,并对解的结构、运动模态与特征根的关系、零输入 响应、零状态响应等概念有清楚的理解。